一種岸基船舶雷達多目標跟蹤分析系統
2024-03-27 03:10:10趙海林汪永軍
艦船電子對抗 2024年1期
趙海林,汪永軍
(1.中國電子科技集團公司第三十八研究所,安徽 合肥 230031;2.孔徑陣列與空間探測安徽省重點實驗室,安徽 合肥 230031)
0 引 言
船舶雷達主要用于對海上目標進行檢測與跟蹤、船舶航行導航、航道避碰輔助和航行管理等,海域環境下雷達回波復雜多樣,包含船舶、島嶼、燈塔、浮標、岸線等有用目標,同時還有海浪雜波、雨雪雜波、同頻有源干擾和系統噪聲等無用信息[1],船舶雷達的主要任務就是最大程度地抑制無用信息的干擾,保留船舶、島嶼、浮標和燈塔等目標信息,不僅要解決有用信號與雜波噪聲的區別(從噪聲中把有用信號剔除出來),降低雜波和虛假目標對真實目標的影響,還要解決量測數據前后時刻的正確配對問題,這些要求對數據處理的跟蹤性能是極大的考驗和挑戰。船舶雷達按其安裝方式主要分為船載和岸基,岸基雷達主要應用于港口船舶監視和交通管理。
本文基于岸基雷達來實時跟蹤和分析船舶目標,多目標跟蹤一般包括航跡起始、航跡維持和航跡刪除3個階段。航跡起始(量測與量測、凝聚與凝聚、量測與凝聚點跡之間的正確關聯)是指未進入穩定航跡(航跡維持)之前航跡確認的過程,它是多目標跟蹤領域中的首要問題,也是最為困難的階段,一個好的航跡起始結果,不但能夠有效地剔除大量虛假目標,為航跡維持減輕負擔,而且能夠及時發現新目標,實現快速起始。如果航跡起始錯誤,則會導致目標丟失,完全無法實現目標的實時監視與跟蹤。因此,為了提高目標穩定跟蹤的性能和監管部門的執法效率,搭建了一種基于岸基船舶雷達多目標跟蹤分析系統。
1 工作原理
該系統利用雷達全天時、全天候、全方位主動探測的特點,根據目標回波及運動學特征,采用多元信息關聯技術,結合預設區域劃分、原始點跡處理、暫時航跡(暫航)過濾及可信度估計、特殊目標分配處理等數據處理分析方法,深入挖掘有價值的信息,對不同類型船舶實現全面自動起始和穩定跟蹤。分析系統架構如圖1所示。
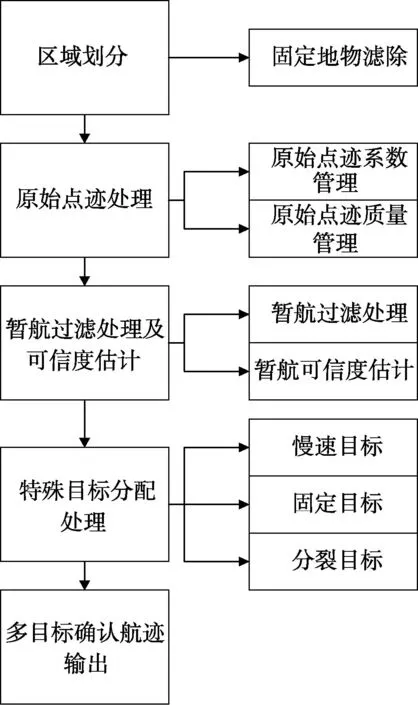
圖1 系統架構
1.1 理論知識[2]
1.1.1 波門的形狀及尺寸
相關波門是用來判斷量測值是否源自目標的決策門限,它是以被跟蹤目標的預測位置為中心,用來確定該目標下一時刻觀測值可能出現范圍的一塊區域。波門大小主要依賴于:(1)預測誤差(航跡外推誤差);(2)正確接收回波的概率(門限概率);(3)雷達測量誤差;(4)目標運動(機動)特性;(5)坐標系的選擇;(6)天線掃描周期。
落入相關波門內的回波稱為候選回波。比較常見的波門包括環形波門、橢圓(球)波門、矩形波門和極坐標系下的扇形波門[3-5],本文航跡起始主要用環形波門和橢圓波門外推預測進行數據關聯。
1.1.2 系統方程
量測方程為:
Z(k+1)=H(k+1)X(k+1)+W(k+1)
(1)
式中:Z(k+1)為量測向量;H(k+1)為量測矩陣;X(k+1)為狀態向量;W(k+1)是具有協方差R(k+1)的零均值、白色高斯量測噪聲序列。
新息或量測殘差為:
(2)
量測的預測協方差(或新息協方差)為:
S(k+1)=H(k+1)P(k+1|k)H′(k+1)+
R(k+1)
(3)
式中:P(k+1|k)為協方差的一步預測;新息協方差S(k+1)也為對稱陣,它被用來衡量新息的不確定性,新息協方差越小,則說明量測值越精確。
1.2 目標區域劃分
目標區域劃分意義在于:濾除固定地物等不相干目標點跡,抑制海岸或島嶼沿邊航行的船舶航跡與陸地目標或雜波點跡錯誤關聯,減少數據處理的負荷。
為了提高目標跟蹤的穩定性和準確性,根據海圖的經緯度位置信息,不提取島嶼、陸地等雜波區域的原始回波點跡,不參與后續起始處理,僅對海域的原始回波提取雷達點跡,進行坐標變換后,掛在點跡時間索引鏈表上進行關聯處理。
如圖2和圖3所示,不相干陸地區(深灰色)不提取雷達點跡參與數據跟蹤處理。
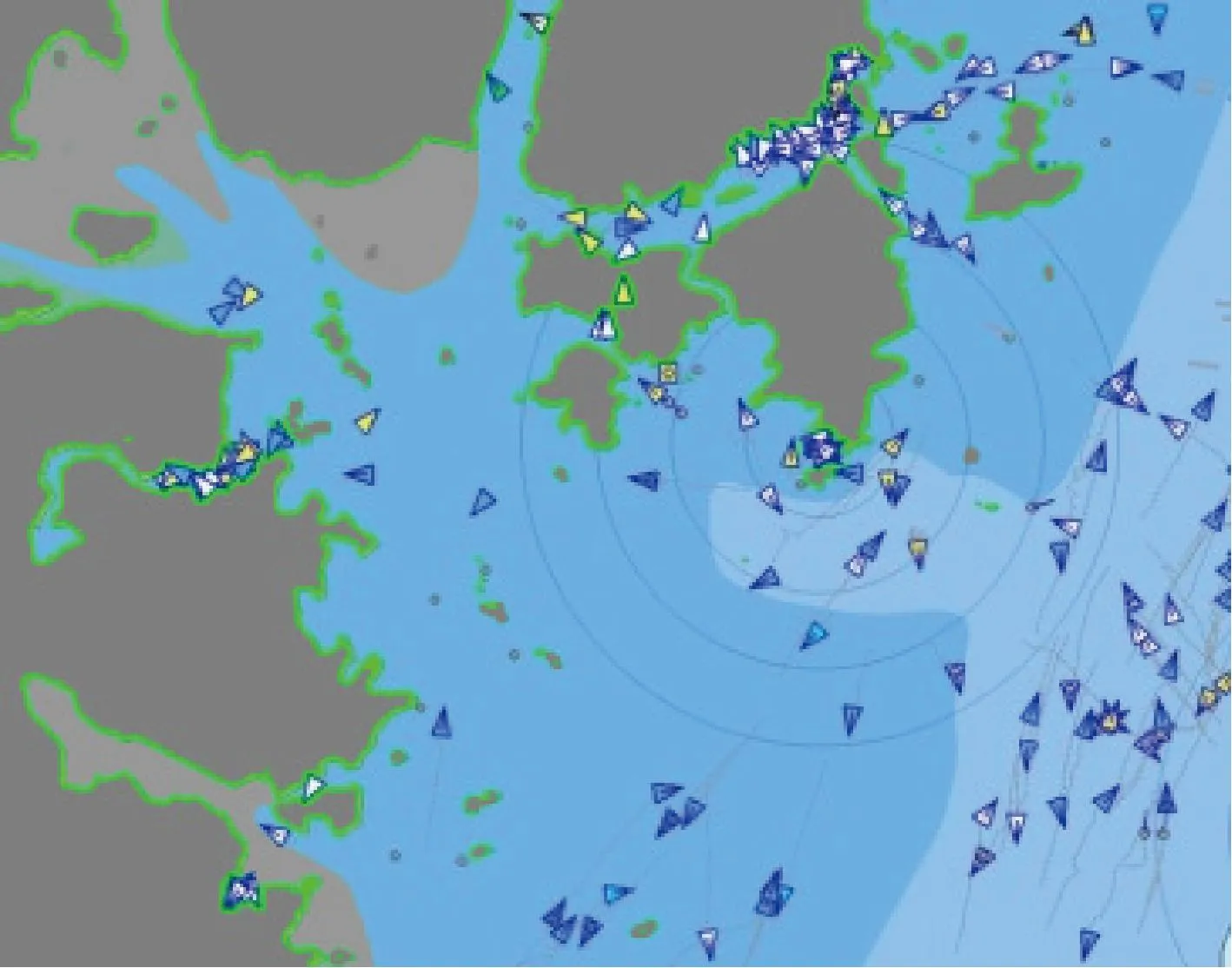
圖2 固定地物雜波(深灰色顯示)

圖3 固定地物雜波濾除
1.3 原始點跡處理
原始點跡處理需要根據雷達的距離分辨率和方位分辨率,從雷達回波中提取出原始點跡的距離厚度和方位寬度,以及其質心位置等信息。
1.3.1 原始點跡系數管理
“原始點跡”是指從雷達掃描所得到的原始回波中提取的雷達點跡;“當前幀原始點跡”是指從暫時航跡點跡環上依次取出的雷達點跡;“凝聚點跡”是指若干個原始點跡通過均值計算所得到的點跡,由于船舶航速較慢、原始點跡位置易受海浪等海況影響較大,為了更能夠凸顯船舶目標的運動特性,提高跟蹤的穩定性,因此引入了“凝聚點跡”這個概念;“綜合相關因子”是指通過位置、速度、航向等綜合因素考慮的相關值,它是由點跡環上取出的當前幀原始點跡與上一幀點跡計算的重疊系數,或者該點跡與暫時航跡外推預測點跡是否關聯決定的;“起始系數”表示暫時航跡起始確認的系數值,由綜合相關因子計算獲得;“重疊系數”是指2幀原始點跡在距離和方位上的重疊比例系數值。
對于與穩定航跡未關聯上的原始點跡,判斷該點跡與暫時航跡是否關聯,先計算暫航凝聚點跡所在的扇區,確定相關的扇區范圍,其次計算原始點跡與暫時航跡的綜合相關因子值,然后在扇區內獲取相關最好的2個暫時航跡,最后根據暫時航跡的幀數來選取指定的相關暫航。也就是說,如果該點跡同時與單幀暫時航跡和多幀暫時航跡關聯,則使用多幀暫航相關,并放入暫航的點跡環中,不考慮單幀暫航了,否則重新建立新的暫時航跡。
接下來根據綜合相關因子值來獲取暫時航跡的起始系數討論具體獲取過程。
在暫時航跡確認建立穩定航跡的過程中,將暫時航跡點跡環中掛載的原始點跡數據一一取出來,然后分2個方向進行數據處理,一個方向是把點跡環中取出的若干原始點跡凝聚成一個點跡,然后把新得到的凝聚點跡與暫時航跡歷史凝聚點跡的位置、航向、航速等信息進行匹配,分析可信度(詳見1.4節),另一個方向是計算該原始點跡與掛載的最佳暫時航跡的綜合相關因子值,分析確認暫航的起始系數。綜合相關因子越大,暫航起始系數越大,則對目標起始越有利,接下來敘述具體步驟。
首先判斷當前幀原始點跡與暫時航跡綜合相關因子值s,而s與點跡幀間的重疊系數和暫航的預測點跡有關。因為船速較慢,在1個掃描周期內,船的位置變化不大,在2幀點跡時間差別不大的前提下,根據距離和方位的交集比例情況來計算原始點跡幀間的重疊系數,若重疊系數大于η(η=0.1),則綜合相關因子值s=1.0+η;若重疊系數不大于η,則當前幀原始點跡與暫時航跡的預測點跡進行關聯處理。設預測點跡與當前幀原始點跡之間的徑向距離差為dr,以及方位差為da,若徑向距離差小于原始點跡的距離厚度WR,且方位差小于其方位寬度WA,則有以下公式:
cr=(dr·γ)/WR
(4)
ca=(da·γ)/WA
(5)
于是,綜合相關因子值為:
γ-cr·P′1-ca·P′2
(6)
式中:P′1,P′2分別是指cr和ca的權重,P′1=0.6,P′2=0.4;γ是指擴張比例系數,γ=1.5。
綜上所述,若綜合相關因子值s大于1,則暫時航跡起始系數累加1;若當前幀原始點跡既不與上一幀點跡重疊,又不與暫時航跡的預測點跡關聯,則暫時航跡起始系數給予適當的降低,根據不同情形,起始系數及其門限值是動態自適應調整的。當暫時航跡起始系數≥n1且
1.3.2 原始點跡質量管理
為了降低目標起始虛警率,特別是減少雷達基站或島嶼等附近的虛假目標(運動或固定特性目標),需要統計原始點跡信息(點跡數量統計、點跡相關因子、鄰近因子等),得到凝聚點跡質量,最后更新暫時航跡質量。暫航質量是作為判斷暫時航跡確認為穩定航跡的主要依據。原始點跡鄰近因子是由最近的暫時航跡(在所有的暫時航跡中,與原始點跡最近的2個暫航)外推預測點跡的波門范圍內決定的,波門范圍可根據原始點跡周圍環境作適當的調整。鄰近因子是相關因子在原始點跡與暫時航跡預測點關聯部分的補充,相關因子相對鄰近因子較為嚴謹,鄰近因子主要是在方位和距離上通過波門關聯得到的,較為直觀。
在原始點跡與穩定航跡不相關的前提下,原始點跡首先通過相關因子來尋找暫時航跡,若能找到最好的1個或2個暫時航跡,則掛在對應的點跡環上,若通過相關因子找不到,接下來通過鄰近因子來尋找最近的1個或2個暫航,找到則掛在暫航點跡環上,找不到則以該點跡重新建立暫時航跡。
點跡環上點跡性質分為2類,一類原始點跡與暫時航跡的相關因子大于ρ(ρ=0.5),另一類原始點跡與暫時航跡預測點跡之間距離在動態參數g_distance范圍(波門門限)內,其鄰近因子值為ρ,由于雷達2.5 s掃描1幀,在雷達點跡不丟失的前提下,20 s凝聚周期內共有8幀原始點跡。如原始點跡數量不大于2幀,則判斷為雜波點,凝聚點跡質量為0,暫時航跡在更新周期內作丟點處理;如原始點跡數量不少于7幀,則凝聚點跡質量為較大值,設為8×ρ,此時不考慮原始點跡的相關因子值和鄰近因子值。
按照原始點跡因子(相關因子或鄰近因子)最低ρ、最多6幀計算,凝聚點跡質量不小于6×ρ的點跡為最優凝聚點跡。若連續2個凝聚點跡都是最優的,則2“幀”(相關成功掃描數)快速起始,否則按照凝聚點跡質量最低門限3×ρ,連續共5幀,當暫時航跡質量(所有凝聚點跡質量之和)不小于15×ρ,并且暫航可信度滿足準則,則給予起始(詳見1.4節)。
目標原始點跡處理流程如圖4、圖5所示。
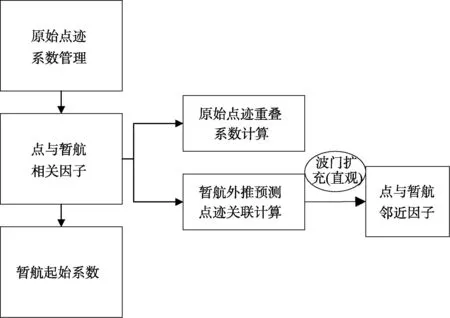
圖4 原始點跡系數管理
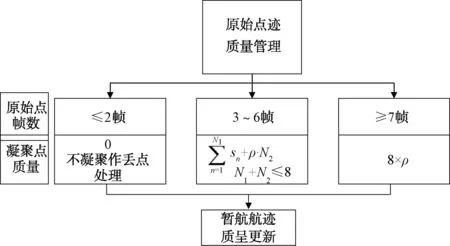
圖5 原始點跡質量管理
1.4 暫航過濾處理及可信度估計
1.4.1 暫航過濾處理
為了降低暫航起始的虛警率,以及暫航與數據錯誤關聯的負荷,暫航過濾處理主要是從整體特征考慮,對于明顯不滿足目標特性的暫航,給予刪除過濾處理,具體分為以下步驟。
步驟一:暫時航跡丟點(凝聚點跡)情況分類判別。
以雷達掃描的第1幀點跡為航跡頭,建立1批新的暫時航跡,在若干雷達掃描周期內,對后續凝聚點跡的丟點情況進行分類判別,剔除干擾的虛假目標。
若在雷達累計10次凝聚周期內,依次統計凝聚點跡關聯的計數值與雷達累計凝聚周期數(3~10)的比例不小于2/3的航跡,則繼續步驟二判別;若連續3幀未收到凝聚點跡或者累計10次凝聚周期,還不能夠起始成穩定航跡的暫航,則判斷為虛假航跡,因而刪除暫時航跡,不再繼續之后的判斷;對于其他丟點情況,根據已有的點跡位置信息計算速度或加速度等運動參數,進行外推補點處理,繼續進行點跡數據關聯分析。具體分類如表1、表2所示。

表1 3~6次凝聚周期統計比例

表2 7~10次凝聚周期統計比例
步驟二:目標航速、航向、加速度波動性判別。
設zi(k),i=1,…,mk為k時刻的第i個測量點跡,Z(k)為第k幀掃描得到的量測集,即
Z(k)={z1(k),…,zmk(k)}
(7)
式中:?zi(k)∈Z(k),i=1,…,mk。
(8)
(9)
于是,最小和最大航行距離分別為
(10)
(11)

基于(1)、(2),本步驟航速和航向主要根據方差來分析目標跟蹤的穩定性,目標加速度波動性是通過當前加速度比前一次加速度增加或減少的百分數來分析的。在雷達連續掃描5幀的周期內,以4個量測點跡數據關聯為例,即第3幀丟點(原始點跡),該量測點跡沒有落入預設波門區域Δr1(1),則航速
Vr1(1—2)=Rr1(1—2)/T
(12)
Vr1(2—4)=Rr1(2—4)/2T
(13)
Vr1(4—5)=Rr1(4—5)/T
(14)
其加速度為:
(15)
(16)
假設雷達掃描第N幀的量測點跡位置為(XN,YN),則目標航向為:
(17)
(18)
(19)
綜上計算,航速的方差為:
(20)
航向的方差為:
(21)
目標航速、航向、加速度波動性需同時滿足條件:
(22)
式中:Vφ=0.1,θφ=100°,σ=5%,分別為航速、航向和加速度波動性方差門限閾值,不滿足上述條件之一的暫航,可認為它是由雜波引起的虛假航跡。
以上過程如圖6所示。
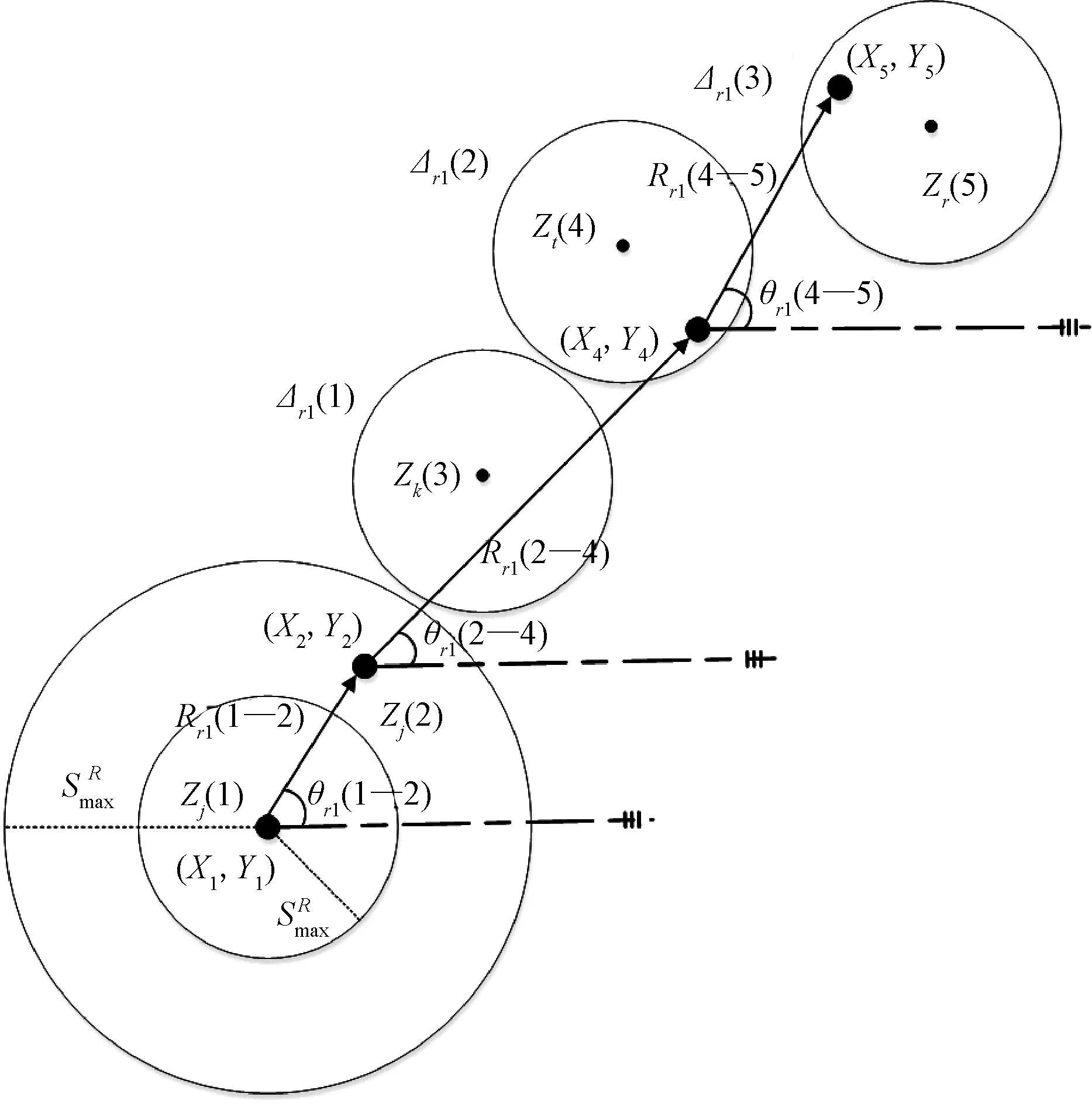
圖6 目標跟蹤顯示
1.4.2 暫航可信度估計
結合以上暫航虛警率檢測,接下來估計目標特性的可信度ψ,以提高目標起始的準確性及跟蹤的穩定性,降低海岸、島嶼、海浪雨雪等雜波干擾引起的虛警。
在暫時航跡確認穩定航跡過程中,若本次處理未收到凝聚點跡數據,則進行丟點處理,當暫航丟點個數不小于雷達成功掃描相關數,或者丟點個數過多(一般不少于3)時,判斷其為虛假航跡,給予暫航刪除處理,對于不滿足丟點刪除的暫航,進行外推補點處理。根據原始點跡所在環境進行可信度度量,即指定暫時航跡點跡環上最近的原始點跡在2 km范圍內,搜索統計暫航與穩定航跡點跡環上最近的原始點跡(2個原始點跡位于同幀內)數量之和。若≥?1,則記為暫航起始禁區(強雜波區);若≮?2且
對于未刪除的暫航進行暫時航跡更新處理,可信度初始化值ψ=η,暫時航跡每更新一次,默認可信度增加(η1+η2+η3)。對于當前最近凝聚點跡,若它只與上一個凝聚點跡計算的速度或航向發生異常,暫航可信度增加(η2+η3);若它只與前第3個凝聚點跡計算的速度或航向發生異常,暫航可信度增加(η1+η3);若暫航當前連續2個凝聚點計算的均值速度只是變化太慢或太快(將均值速度與快速或慢速門限值比較),暫航可信度增加(η1+η2),其中,快速門限值和慢速門限值是根據連續2個凝聚點跡之間的航向來劃分界定,航向偏角過大,慢速門限值調大,快速門限值調小;若連續2次航向(根據連續2個凝聚點跡計算所得)偏轉度不小于直角,則本次暫時航跡更新過程中,可信度不增加。
部分過程具體如下:令Pi(i=1,…,10)是暫時航跡從最近凝聚點跡P1開始的第i個凝聚點,依次計算連續2個凝聚點(P1與P2,P2與P3,P3與P4)之間的速度和航向分別為Vk1[0],Vk1[1],Vk1[2]和Ck1[0],Ck1[1],Ck1[2];同理,從最近凝聚點跡開始,依次計算前3個凝聚點(P1與P4,P4與P7,P7與P10)之間的速度和航向分別為Vk3[0],Vk3[1],Vk3[2]和Ck3[0],Ck3[1],Ck3[2]。
對于連續2個凝聚點跡之間的航速、航向同時滿足:
(23)
則暫航可信度增加(η2+η3),其中,MaxS1、MaxC1分別是連續2個凝聚點跡的最大航速、航向差(MaxS1=10 m/s,MaxC1=45×π/180)。
對于前3個凝聚點跡的航速、航向同時滿足:
(24)
則暫航可信度增加(η1+η3),其中,MaxS3,MaxC3分別是前3個凝聚點跡的最大航速、航向差(MaxS3=5 m/s,MaxC3=25×π/180)。
根據目標速度門限,判斷暫時航跡最近均值速度是否過快或過慢。首先目標慢速門限值和快速門限值分別默認為:MinSlow1=2.0,MaxFast1=16.5。
若暫航最近凝聚點跡與上一個點跡的航向發生異常,則慢速目標門限值調大,快速目標門限值調小,即:MinSlow2=2.5,MaxFast2=10.5。
當暫航最近更新的均值速度小于慢速目標門限值,或大于快速目標門限值,則暫航可信度增加(η1+η2)。
接下來初始化可信度門限值[η+3×(η1+η2+η3)]和起始系數門限值n0。根據不同情形,可信度門限值是動態自適應調整的,若暫時航跡與首點計算的速度較小(慢速目標),則可信度門限值增加δ1;若暫時航跡起始系數不小于n0,則可信度門限值相應減小Δ1;若暫時航跡可信度不小于[η+3×(η1+η2+η3)],則起始系數門限也相應減小Δ2。最后進行暫時航跡起始確認判斷:
(1) 暫時航跡可信度不小于其門限,并且起始系數不小于其門限;
(2) 暫航連續2次凝聚點跡為最優點;
(3) 暫航質量不小于15×ρ,且滿足預設的可信度門限值。
若滿足以上條件之一的,則起始確認為穩定航跡,并且刪除該暫時航跡。
1.5 特殊目標分配處理
對不同特征情形目標進行分類特殊處理。
(1) 對于慢速目標而言,在暫時航跡與首點距離較小的前提下,若與首點速度較小,或與首點距離小于航程的λ倍(λ是徘徊系數,0<λ≤0.6),并且不滿足其他起始準則,則本幀暫航慢速系數增加。對于非慢速目標,暫航慢速系數相應減小,當慢速系數大于一定值時,則抑制目標起始。該方法既能減少虛假目標的起始,又能快速檢測出慢速目標。
(2) 對于固定目標而言,主要通過計算固定暫時航跡質量、統計固定原始點跡數量以及凝聚點跡丟點處理來判斷起始。由于固定目標位置和回波特性相對雜波點跡比較穩定,因此通過距離(雷達目標分辨距離)進行點跡與暫時航跡關聯。點跡環上凝聚過程中的暫時航跡丟點處理,以及暫航維持時間過長處理情況類似于運動特性目標,其他兩種判定情況如下:
(a) 統計凝聚周期的點跡數及點跡質量,計算暫航質量,若固定暫航質量不小于15×ρ,則固定暫航起始;
(b) 若取出的原始點跡與暫航點跡環上最近原始點跡屬于不同幀,且在2幀時間范圍內的前提下,則累計1,并統計固定目標原始點跡數量,若數量不小于5,則給予固定暫航起始為穩定航跡。
(3) 對于點跡質量不高的數據源,由于量測點跡誤差,在距離或方位上重疊的多個雷達點跡的分裂目標的處理方法:
由暫時航跡點跡環上最近原始點跡位置(原始方位A0和原始距離R0)以及距離厚度WR、方位寬度WA來計算開始距離、結束距離、開始方位以及結束方位,過程如下,
開始方位:
Abgn=A0-WA/2
(25)
結束方位:
Aend=A0+WA/2
(26)
若開始方位Abgn<0,則Abgn=Abgn+2π;若開始方位Abgn≥2π,則Abgn=Abgn-2π。
開始距離:
Rbgn=R0-max(60,WR)/2
(27)
結束距離:
Rend=R0+max(60,WR)/2
(28)
不妨令暫時航跡此時的可信度為(η+Ω),在暫航最近凝聚點跡所在的扇區里搜索穩定航跡,在搜索到的前提下,若該暫航點跡環上的最近幀原始點跡位于穩定航跡濾波位置的較小區域范圍(雷達原始回波的分辨距離)內,則暫航可信度降低了Ω/2;若由穩定航跡濾波位置計算出的距離和航向都位于原始點跡的開始距離與結束距離之間,開始方位與結束方位之間,則暫時航跡可信度降低為初始默認值(ψ=η)。上述方法是對暫時航跡延遲處理,嚴格暫航起始條件,抑制近距離目標分裂起始。
對于上述情形的一種特例,即虛假的雙拖漁船問題,在暫時航跡最近凝聚點跡所在的扇區內尋找穩定航跡,若穩定航跡與該暫時航跡之間的航速、航向差不多,而且始終并向航行,當搜索到的穩定航跡與該暫時航跡之間的距離<距離門限,則暫時航跡延遲判斷起始。其中,該距離門限是由雷達的分辨性能決定的。
2 結 論
基于岸基雷達多目標跟蹤分析系統,對ARM處理器檢測提取送過來的雷達(原始)點跡進行實時數據與跟蹤分析處理。總體航跡起始情況如圖7所示。
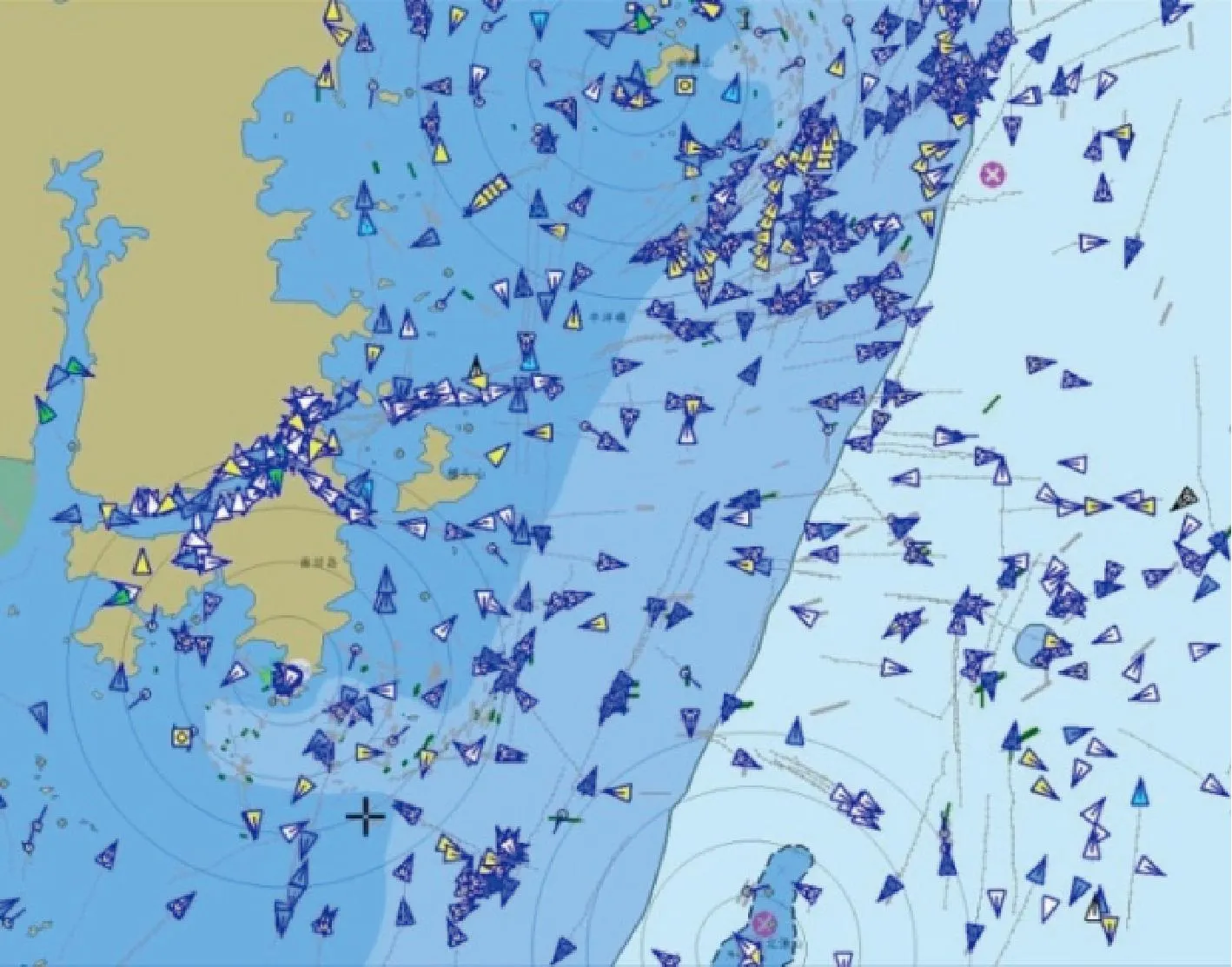
圖7 系統航跡起始概況
如圖8所示,由于雷達基站附近有大量若隱若現的雜波點跡(海浪、雨雪雜波等),本系統能夠根據點跡質量和運動學特性,對雜波和目標特征進行分析處理,通過量測點跡與量測點跡關聯,點跡與航跡數據關聯來抑制雜波引起的虛警率,防止虛假目標的起始,提高目標跟蹤的穩定度。

圖8 雜波干擾抑制
如圖9所示,本系統能夠對較有規律的目標快速起始,提高目標起始的準確率,防止真實目標跟蹤的丟失。

圖9 規律目標快速起始
如圖10所示,同一目標被不同雷達探測到,本系統受方位偏差導致同幀送來不同位置雷達點跡而出現虛假目標的干擾性小。

圖10 虛假雙拖漁船抑制
圖11是船舶自動識別系統(AIS)目標和雷達目標并排航行,屬于雙拖漁船,通過本分析系統可提高辨別真實和虛假雙拖的能力,提高起始的準確性和跟蹤的穩定性,降低虛警率。
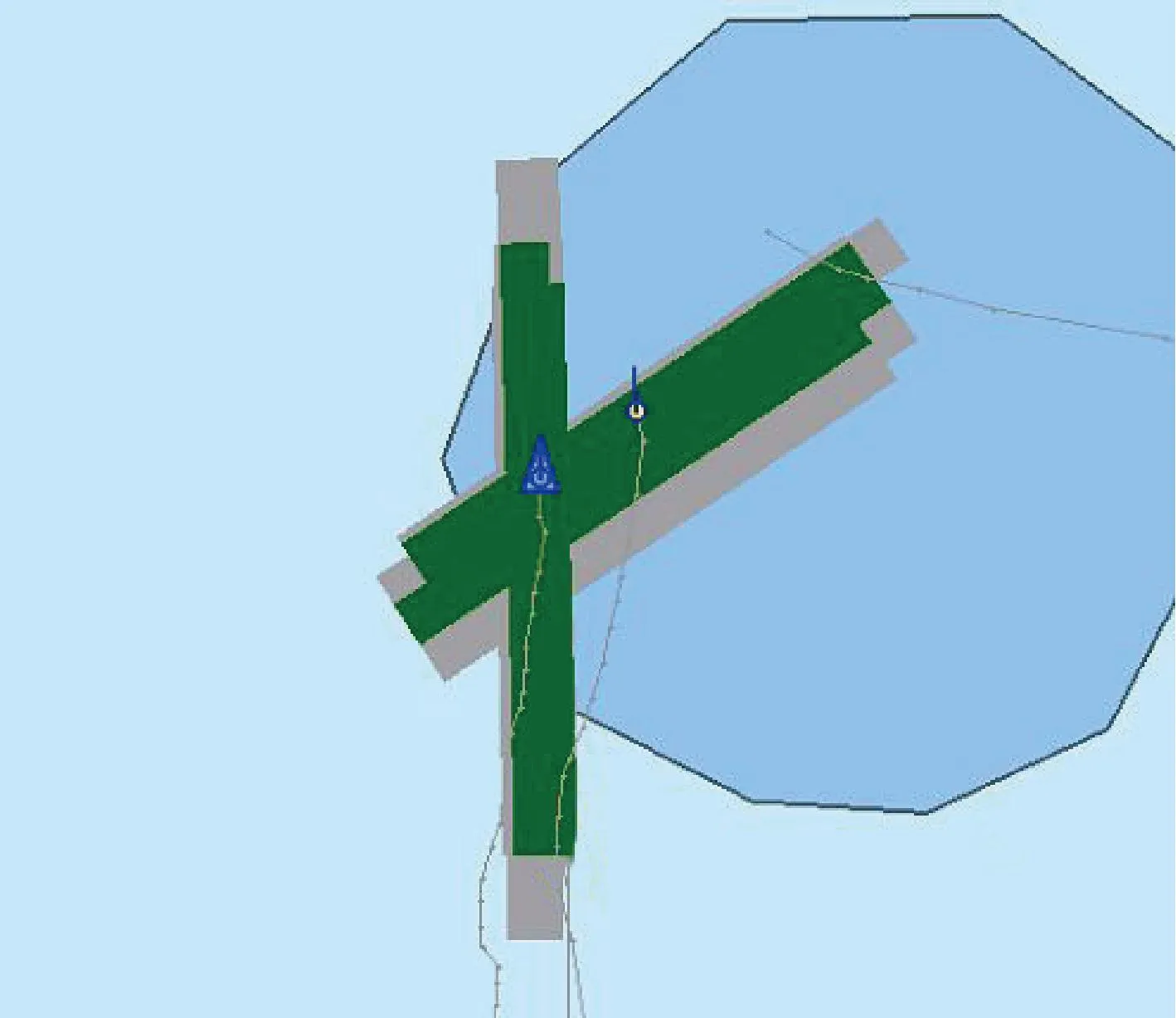
圖11 雙拖漁船檢測
3 結束語
航跡起始是多目標跟蹤中的首要問題,雜波環境下航跡起始處理最為復雜[6],目標的跟蹤處理尤其存在難度[7],目標快速起始的高準確率和降低虛警率通常是矛盾的。因此,根據目標在不同雜波強度區域、點跡特性和運動學統計特征,充分挖掘點跡數據的有用信息,采用不同的數據關聯策略,進行數據優化處理,能提高雜波區目標正確起始概率,降低雜波或目標密集環境下的目標跟蹤丟失現象,有效地抑制雜波引起的虛假航跡,同時保證了多目標的快速起始和穩定跟蹤,為近海船舶監視系統提供了一種較為全面新穎的目標跟蹤方法,為海洋漁業執法大隊提供了有力的監管手段,在工程上具有廣泛的應用價值。