一種改進型KB-RLS算法在自干擾對消中的工程應用
2024-03-27 03:10:54王鐸澎張生鳳
艦船電子對抗 2024年1期
關鍵詞:信號
王鐸澎,黃 華,張生鳳
(中國船舶集團有限公司第八研究院,江蘇 揚州 225101)
0 引 言
在現代電子對抗環境中,如果不能對己方設備收發系統間的電磁信號進行合理的收發隔離,那么強烈的系統間自干擾會帶來:(1)接收系統誤碼率增加;(2)接收系統的接收信噪比惡化;(3)接收系統產生接收飽和甚至自激現象[1-2]。為了避免平臺間強自干擾給收發系統帶來的巨大阻礙,己方設備需要利用不同的措施對自干擾進行抑制,常見的抑制方法可以分為被動抑制和主動抑制2種。被動抑制主要是通過設計收發天線從而對自干擾進行抑制,但抑制能力有限[3]。主動抑制主要分為模擬域的自干擾抑制和數字域的自干擾抑制。模擬域的自干擾抑制主要是通過設計硬件對消電路的方式達到抑制干擾的目的[4]。在實際應用中,該方法雖然具有較好的抑制能力,但受到元器件精度的限制,在抑制干擾的同時,該方法會從模擬器件處引入新的噪聲[5]。數字域干擾抑制則是指在數字域對系統接收的信號進行對消處理,以此抑制自干擾[6]。該過程是信號在進行正式處理前對消流程的最后一步,不會受限于電子元器件精度不足,具有巨大的抑制潛力[7]。所以,數字域的自干擾對消對于整個對消系統的最終結果具有極為重要的意義。
目前數字域對消的方法主要分為自干擾重建自干擾對消和自適應濾波自干擾對消2種方法[5]。自干擾重建自適應濾波是指在時域或者頻域對干擾信號進行信道估計后再重建干擾信號,最后將重建信號從接收信號中減掉,如文獻[7]提出異步數字域分段卷積方法,進行數字域自干擾抑制,并在頻域重建干擾,最后重疊抵消干擾。自適應濾波則是利用自適應濾波器根據接收信號和參考信號進行數字濾波,最終同樣地從接收信號中減去重建信號[8]。目前在相關的研究中,文獻[9]針對8 MHz的窄帶信號,利用自適應濾波器進行干擾抑制,取得了30 dB的干擾抑制效果,文獻[10]則對歸一化最小均方誤差(NLMS)法、最小均方誤差(LMS)法和遞歸最小二乘(RLS)法自適應濾波器的干擾抑制性能進行了對比分析。對2種方法[7-10]進行比較,自干擾信道重建自干擾抑制方法雖然能保持較高的對消精度,但實際過程中求解較為復雜,求解參量保持在o(N3)量級,而自適應濾波自干擾抑制在保證一定對消精度的條件下,計算過程簡單,且計算參量在o(N2)量級,遠少于自干擾信道重建自干擾抑制的運算量,有利于實際的工程應用。
自適應濾波自干擾抑制的核心在于自適應濾波算法的設計,尋找濾波器的最優權值。目前自干擾對消場景下常見的自適應濾波算法主要有LMS算法和RLS 2種。文獻[11]利用LMS濾波器進行干擾對消,雖然取得了一定的干擾對消效果,但收斂速度較為緩慢。文獻[12]則針對多輸入多輸出(MIMO)系統采用了RLS算法進行干擾對消,文獻[13]分析了RLS算法和可變步長最小均方誤差(VSSLMS),基于符號最小均方根(SSLMS)算法在同樣信噪條件下的自干擾抑制性能。文獻[14]則將LMS和RLS自適應濾波器結合起來完成了不同場景下的仿真工作。對文獻[11]~[14]進行對比分析得到:RLS算法在最小平方損失函數準則下尋找最優權值,在實際應用中,相較于LMS算法尋找最快下降梯度,雖然收斂精度略低,但該方法具有更好的收斂速度,可以更好地滿足實際作戰的時效需求,故已有的研究在數字域自適應濾波自干擾對消應用中通常采用經典RLS算法進行自適應權值系數的計算。但是在相關的研究[12-14]中,RLS雖然收斂迅速,但由于算法本身的特點,該算法對輸入信號具有較高的要求,輸入信號較為復雜時,RLS算法的迭代過程容易發散,且應對信號突變時易產生誤差變化較大的情況。而針對RLS算法的改進中,已有的改進測試通常停留在理想情況下的仿真測試,而改進后RLS算法的實際適應性未能得到有效的討論和評價。
本文在結合實際應用需求的前提下,對RLS算法中迭代過程的收斂因子和自相關矩陣的迭代過程進行改進,在保持算法本身優勢的前提下,克服了RLS算法本身迭代過程易發散的劣勢,同時利用實際環境測得的電磁信號數據,進行對比測試,以此完成對該算法多方面的評價。
1 系統模型
如圖1所示,在自適應濾波自干擾抑制模型中,發射的雷達自干擾信號一路直接進入自適應濾波器,作為發射信號X(n),另一路經過電磁信號傳播的上下鏈路之后,作為參考信號d(n)進入自適應濾波器,自適應濾波器根據參考信號得到重建信號,最終將重建信號從參考信號中輸出便得到自干擾抑制后的輸出信號。
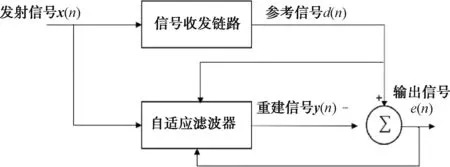
圖1 干擾抑制自適應濾波信號流示意圖
對應的M階RLS濾波器中,X(n)、W(n)是迭代開始前的輸入信號向量和權值向量,該向量在首次迭代之前進行初始化,e(n)是每次的迭代誤差,K(n)是對應的卡爾曼增益向量。而PMM是自相關信號的迭代矩陣,通常初始化為對角線的M階單位矩陣,具體的迭代過程如圖2所示。

圖2 RLS算法流程示意圖
在RLS算法的實際應用中,為了克服算法本身的迭代易發散、收斂精度不高等劣勢,研究者針對該算法進行了針對各個步驟的改進。
在RLS算法中,遺忘因子作為重要的迭代參數,直接影響了迭代過程的誤差起伏,遺忘因子的改進中,文獻[15]將收斂因子從固定的常值改為關于當次誤差e(n)的函數為:
(1)
文獻[16]則根據正則表達式將收斂因子的迭代公式改為:
λ(n)=λmin+1-λmin2L(n)
(2)
L(n)=-round(μe2(n))
(3)
在自相關矩陣的計算過程中,為了保持該矩陣的跟蹤能力,研究者們在該部分加入了自干擾項,以此保證計算卡爾曼增益向量不至于降為0。如文獻[17]中,將PMM矩陣的計算公式改為:
PMM(n-1)+round(γε(n))]
(4)
此外,關于權值計算公式的改進,文獻[15]提出在迭代過程中,用公式(5)、(6)作為權值的計算公式:
W(n)=W(n-1)+K(n)e(n)+ρ(n)
(5)
ρ(n)=r×(W(n)-W(n-1))
(6)
式中:r為瞬時系數,為一常值。
該方法的改進未能達到較為良好的提升效果,故不作討論。除此之外,已有的文獻中相關討論較少。
2 算法改進
目前已有的RLS算法改進主要通過引入當次誤差作為反饋參量,以此調節收斂因子等重要參數的大小。若實際碰到信號突變時,當次誤差則無法完全消除信號突變帶來的誤差增加,故本文在改進RLS算法引用當次誤差e(n)的同時,引入了前次誤差e(n-1)。結合文獻[17]的研究,若引入項為e(n)、e(n-1)或e2(n)時,則該項與輸入噪聲有耦合關系;若引入項e(n)、e(n-1)為二元一次函數形式,則不會與輸入噪聲有耦合關系,故引入形式選擇為e(n)和e(n-1)的二元一次函數形式。
本文結合已有的研究,對RLS算法進行改進,在遺忘因子項引入當次誤差和前次誤差,見式(9),在自相關矩陣項引入自干擾項,且該自干擾項為當次誤差和前次誤差的函數,見式(13),以此增加算法的穩定性。
最終的改進算法具體流程為:
X(n)=[x(n)x(n-1)…x(n-M-1)]T
(7)
W(n)=[w0(n)w0(n)…wM-1(n)]
(8)
(9)
若λ(n)>1則λ(n)=1
e(n)=d(n)-WTX(n)
(10)
(11)
W(n)=W(n-1)+K(n)e(n)
(12)
PMM(n-1)+αIround(γ(ε(n)+oε(n-1)))]
(13)
式中:a1,a2,b,m,d,γ,o均為調節系數,需實測。
3 硬件測試
在結合具體干擾對消測試的實際情況下,本文所設計的硬件測試框架如圖3。
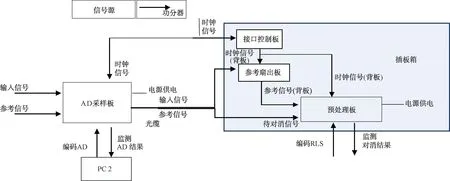
圖3 適應濾波自干擾對消測試場景示意圖
在該測試場景中,用自適應濾波器對測試信號進行重建,激勵信號經過不同的傳輸路徑,先后到達預處理板,然后在預處理板中進行測試。
在測試過程中,任意波形發生器產生信號后,經過一分二功分器,一路作為輸入參考信號直接進入模數處理器(ADC)進行采樣,隨后進入預處理對消板作為參考;另一路激勵信號經過上下變頻鏈路之后,再進入ADC進行采樣,作為參考。
參考信號和輸入信號進入ADC之后,輸入信號直接進入預處理板,參考信號傳入參考扇出板后,通過背板傳輸進入預處理板,至此,2路信號全部進入預處理板,數字對消處理開始。
為保證2路信號的同時性,選用信號發生器發射10 MHz點頻信號作為時鐘信號,分別供給ADC和插箱內的接口控制板,接口控制板向參考扇出板和預處理板提供同源時鐘信號。
在該硬件架構下,對自適應濾波算法進行針對性測試:
(1) 不同類型信號對消精度
設置部分重要參數如表1所示。
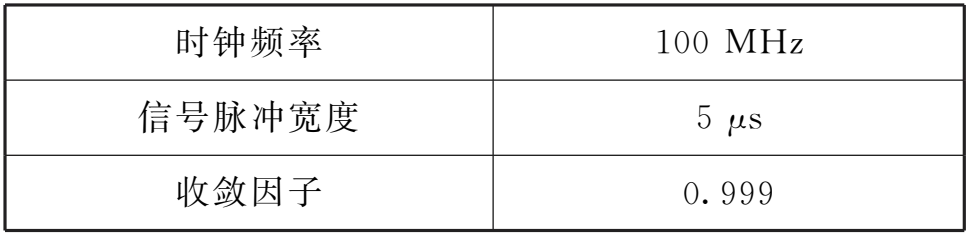
表1 自適應對消測試部分參數表
在對簡單的多個脈沖信號進行對消測試中,測試信號波形如圖4所示。
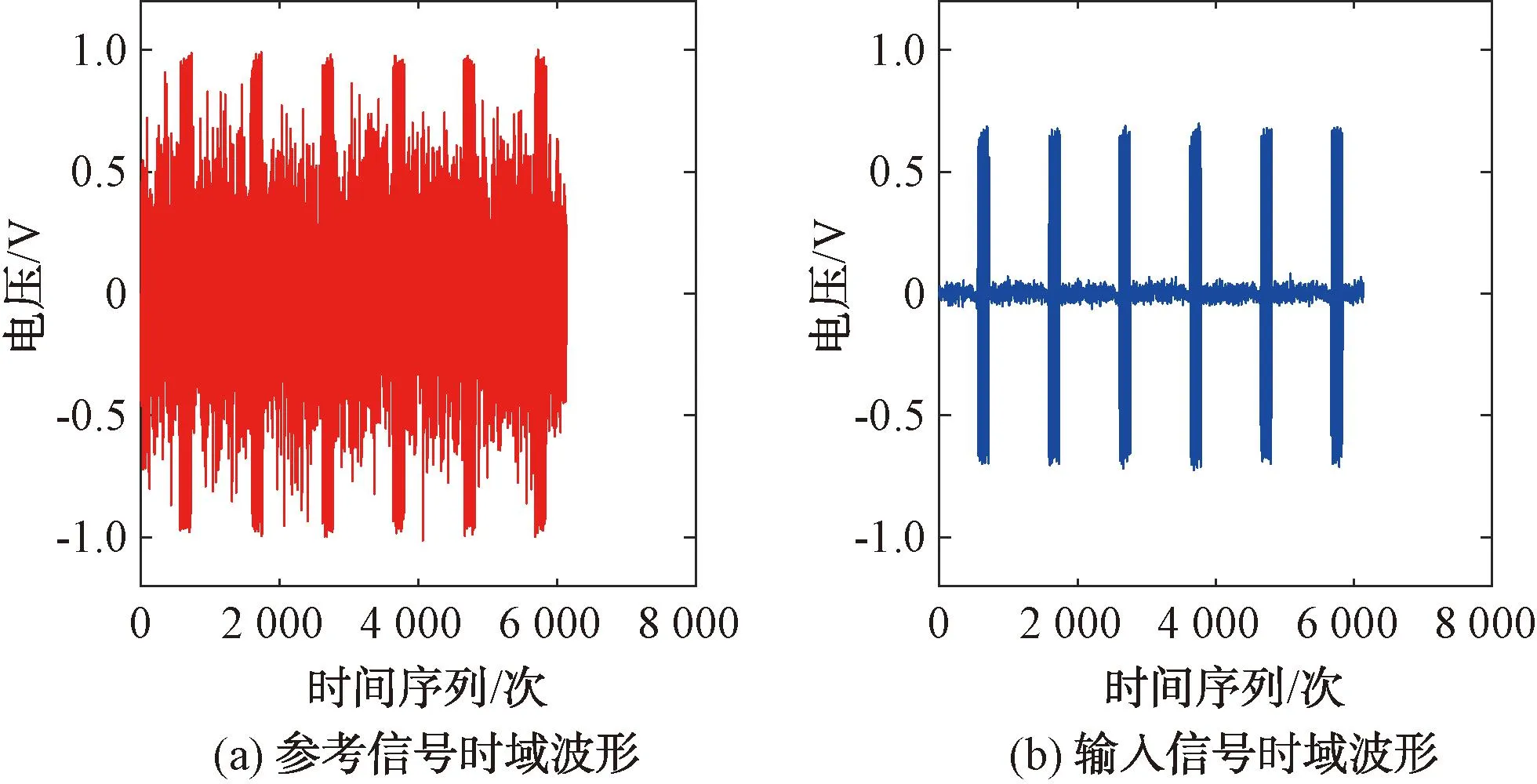
圖4 多脈沖測試對消收發信號波形圖
利用2種算法進行對消,對消結果如表2所示。
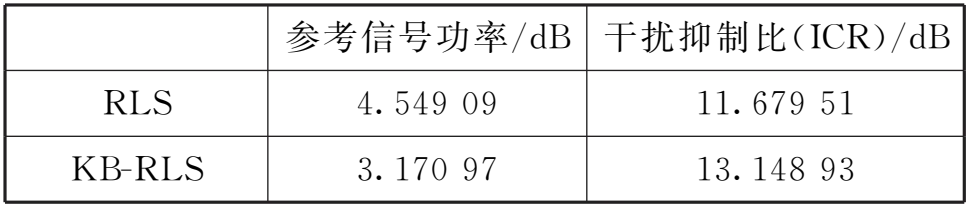
表2 2種算法對消脈沖信號結果統計表
在針對非線性調頻信號(NLFM)信號的測試中,根據實際的對消結果繪制對消NLFM信號頻譜,如圖5所示。
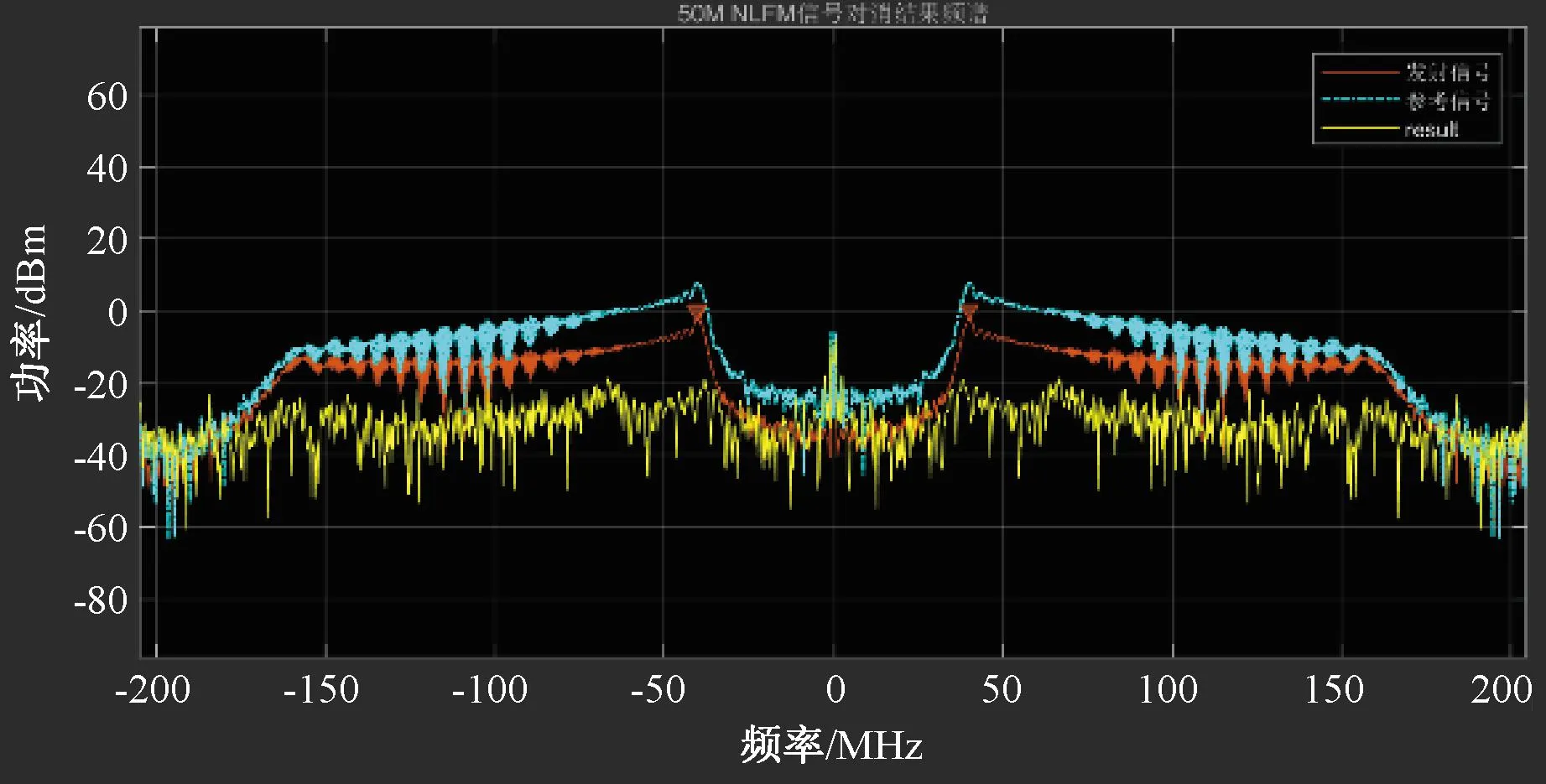
圖5 經典RLS算法對消NLFM信號頻譜
存儲該測試結果后利用KB-RLS算法再次對消,結果如表3所示。
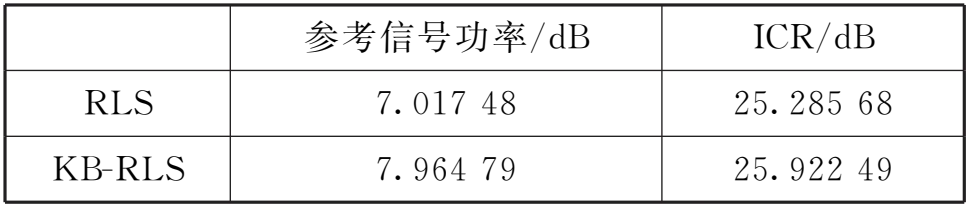
表3 2種算法對消NLFM信號結果統計表
同樣地,針對50 MHz帶寬的調相信號(巴克碼)時,實際對消測試信號頻譜如圖6所示。

圖6 經典RLS算法對消調相信號頻譜
利用本文改進的算法進行對消測試后,對比最終對消結果,見表4。

表4 2種算法對消調相信號結果統計表
(2) 針對不同帶寬信號
該項測試用不同帶寬的LFM信號進行測試,具體參數見表5。

表5 不同帶寬測試信號部分參數表
當LFM信號帶寬為50 MHz時,實際對消測試信號頻譜如圖7所示。

圖7 經典RLS算法對消50 MHz LFM信號頻譜
而當結果分別為75 MHz,100 MHz,150 MHz,175 MHz時,對最終對消結果進行統計,見圖8。
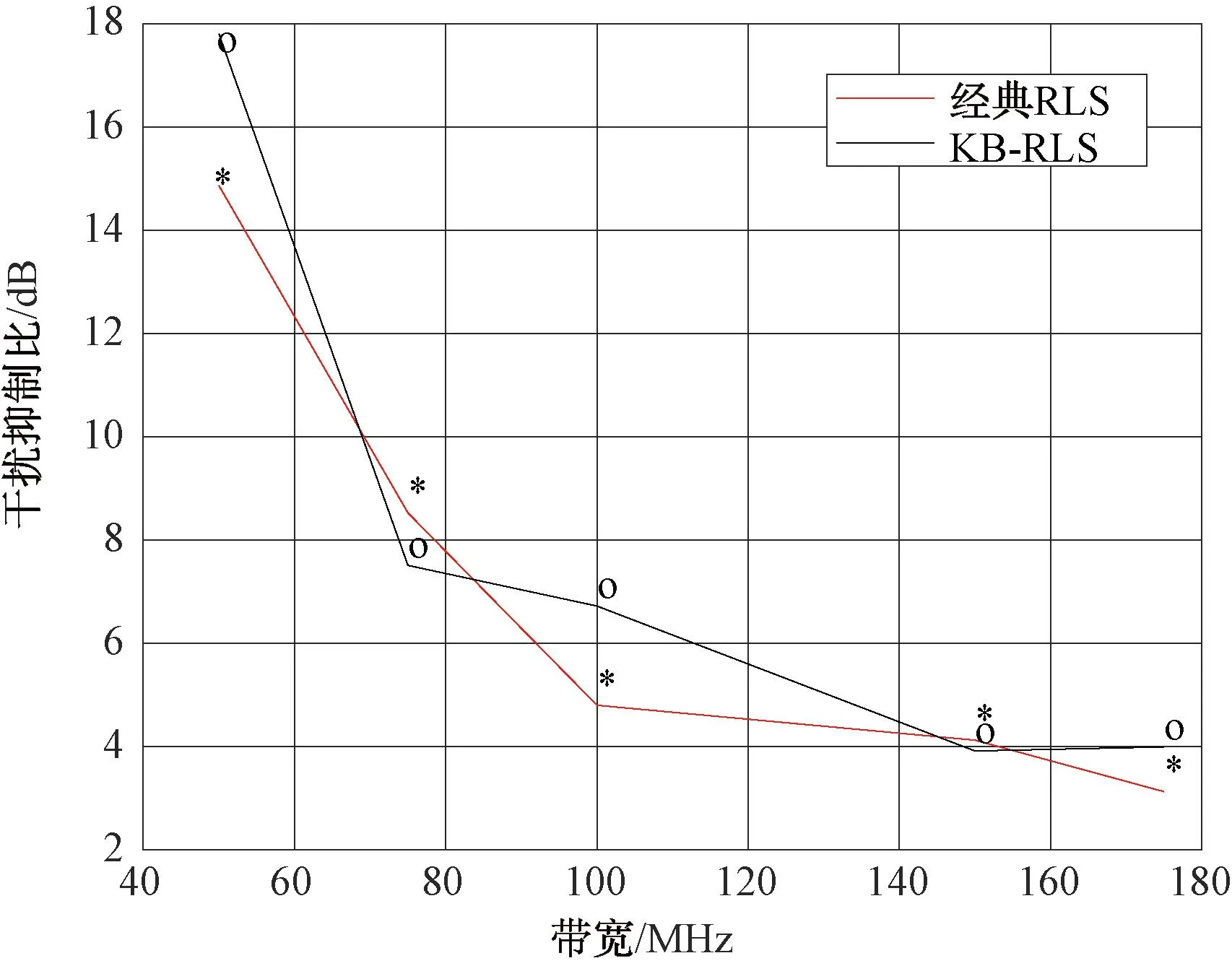
圖8 不同帶寬下2種算法對消結果示意圖
(3) 針對外來信號適應性
該項測試中,在實際接收信號中添加了不同的外界信號,以此檢測算法在最終應用中的可靠性,詳細的測試參數見表6。

表6 外來信號測試部分參數表
測試中原有的信號頻譜如圖9所示(以外界添加單點信號為例)。
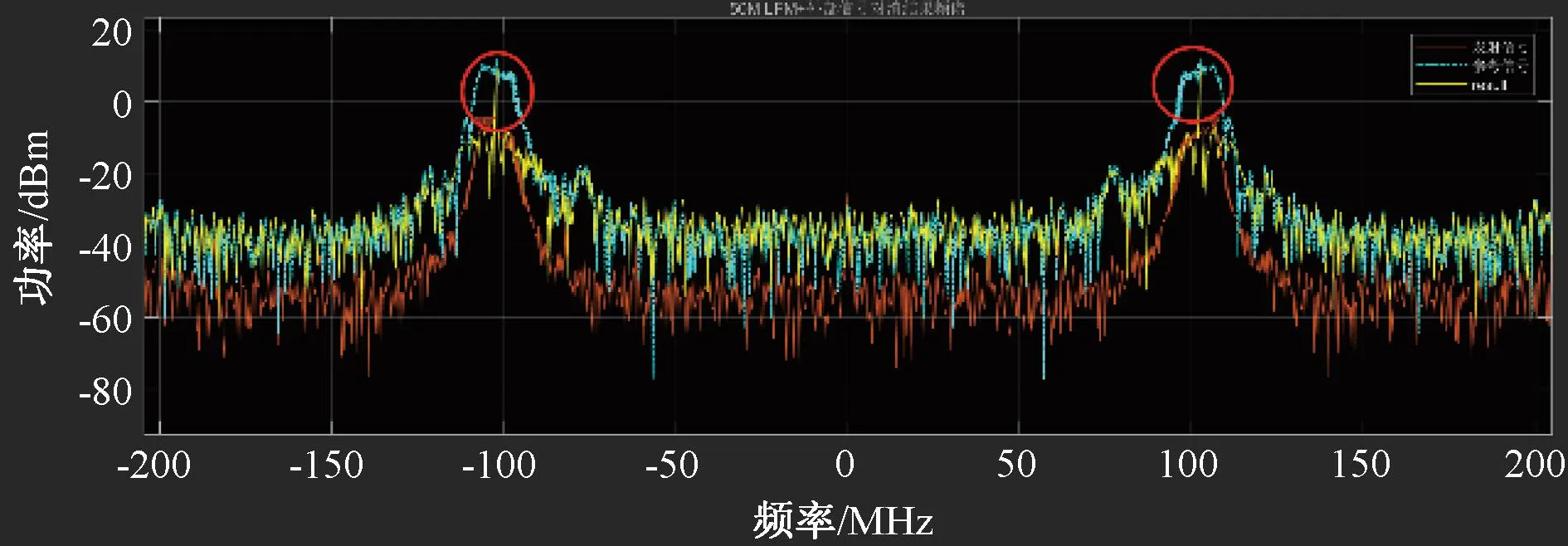
圖9 RLS算法對消50 MHz LFM外來單點信號頻譜
對最終的測試結果進行統計,并得到表7。
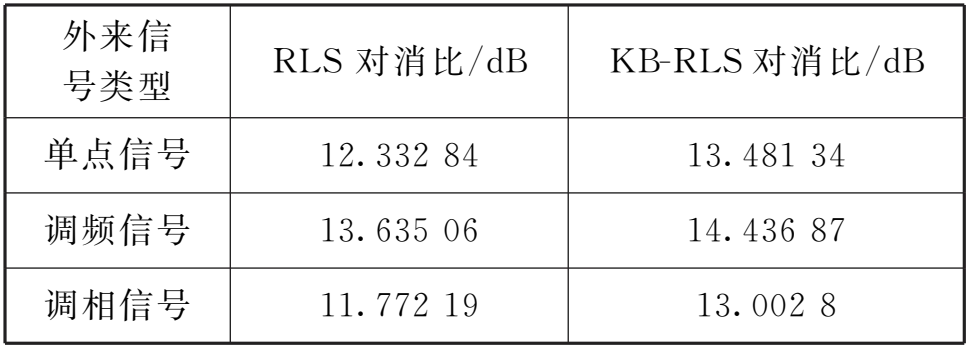
表7 2種算法測試外界信號統計表
在該項測試中,本文提到的KB-RLS算法在針對第1項的脈沖信號測試中取得了優于經典RLS算法的對消結果,在面對其他復雜信號時,也能保證與RLS算法對消結果基本持平,且保持外界信號不被消除。但在碰到對消信號頻帶擴展時,2種算法均未能取得較好的對消效果,需要繼續研究。
4 結束語
本文基于改進型KB-RLS算法,搭建了自干擾對消的測試驗證場景,對不同類型、不同帶寬及實際電磁環境下的信號進行了測試。測試結果表明,該算法取得了更高的收斂精度和更好的對消效果。與經典RLS算法相比,該算法針對實際電磁環境下的100 MHz帶寬的LFM、NLFM、調相信號及脈沖信號,對消效果均調高了1~3 dB。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06