低成本接收陣列方向圖測試系統與方法
2024-03-27 03:11:06王璇
艦船電子對抗 2024年1期
王 璇
(中國電子科技集團公司第五十四研究所,河北 石家莊 050081)
0 引 言
傳統的相控陣測試通常有外場[1]、近場[2]、暗室[3]等方法,這些測試方法的弊端包括:需要遠場條件、干凈的電磁環境或者復雜的專用設備;需要系統各部分完全齊套才能進行;各模塊非理想因素疊加,使得問題定位困難,增加故障解決難度,同時降低研發效率。針對數字陣列和所使用的波束合成算法的測試系統,能夠實現階段性的功能和性能評估,有利于技術研發并提高系統驗證效率,利用陣列信號模擬技術[4]能夠在不依賴天線、遠場及暗室條件下實現該需求。
陣列信號模擬技術可分為數字域[5]和模擬域[6]2類。由于雷達[7]、導航[8]、通信[9]與聲納[10]領域中使用的陣列信號模擬設備需要模擬多種場景、多制式信號并完成多種功能,因此通常采用實現復雜且成本較高的數字收發信道實現。本文針對接收陣列的方向圖測試功能進行了系統簡化設計,主要采用射頻波束控制器來實現陣列信號模擬,避免了多通道數字接收所面臨的同步、復雜濾波算法實現等困難,具備低成本、低復雜度、易于操作等特點,特別適合射頻領域的開發使用。
1 接收陣列方向圖測試平臺與方法
以一維均勻線陣(ULA)為例,N單元陣因子方向圖可以表述為:
(1)
式中:W為幅度加權向量;d為單元間距;ω為陣列工作的角頻率;c為光速常數;括號內第1項為方位角θ方向來波在各單元形成的時延梯度;括號內第2項為將波束指向θB時,所需要設置的波束合成時延梯度。
在討論波束合成算法時,主要討論的是式(1)第2項;而對于本文所討論的通過陣列信號模擬來進行方向圖測試,則重點討論的是第1項。
在后面的分析與仿真中,簡化而不失一般性,假定采用單位加權并假定波束合成指向θB=0°時,式(1)可簡化為:
(2)
在外場或暗室測試方法中,各單元時延梯度是連續變化的,但采用射頻移相器或射頻時延器來模擬空間來波方向,只能通過量化相位和量化時延來近似。假定來波方向θ時第n個單元對應的量化相位P(n,θ)可由(3)式求解:
(3)
式中:Pstep為射頻移相器的量化步進;round[·]為四舍五入取整;mod[·]為取余數。
利用式(1)~式(3),圖1所示由上位機、信號收發、波束控制器以及待測設備(DUT)所構成的測試系統就能夠完成對接收陣列的方向圖測試。
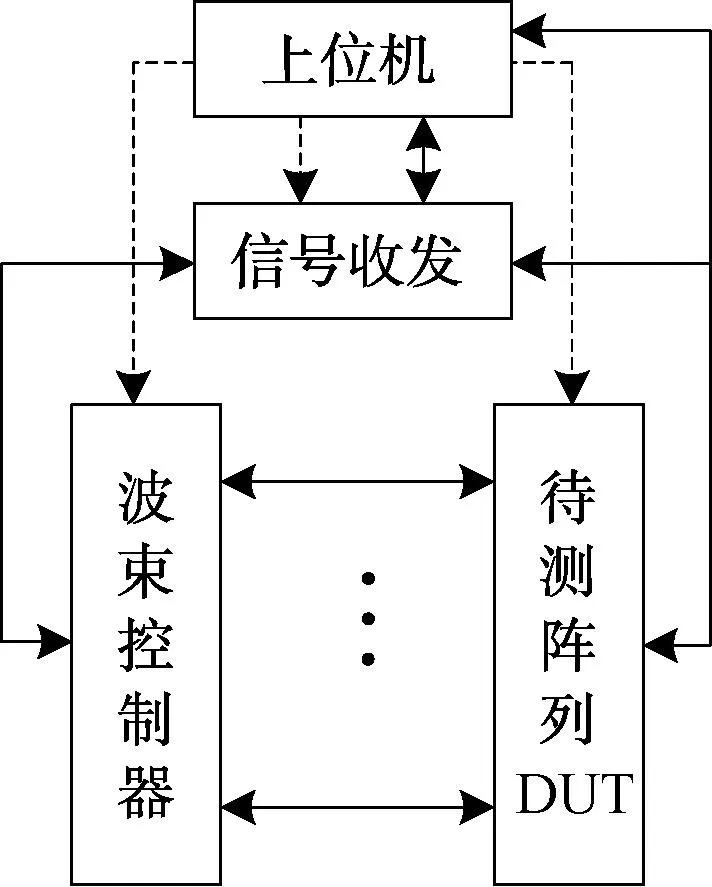
圖1 測試系統構成框圖
圖1中的上位機主要通過軟件完成對信號收發、波束控制器以及DUT的控制及數據處理,數據流和控制碼通過網絡接口或串口實現通信。
信號收發完成單音或調制信號產生與接收功能,通過商用的收發器代替矢網或信號源、頻譜儀能夠降低整個測試系統的復雜度和成本。
波束控制器完成信號分合路以及對每路信號進行幅度、相位和時延控制功能,通過使用雙向放大器進行增益補償,測試系統能夠收發雙向使用。
通過Matlab進行建模仿真,假定待測設備是1個N=16的ULA,陣列工作頻率為1 GHz,采樣速率為4 GHz,采樣深度為1 024點,方位角一維掃描范圍為-90°~+90°,測試掃描步進為1°,計算相位梯度采用無柵瓣半波長單元間距,波束控制器的移相步進為22.5°,待測設備和測試系統校準完成后殘留隨機相位差滿足[-Pstep/2,Pstep/2]內的均勻分布,16通道仿真取表1所示的值。
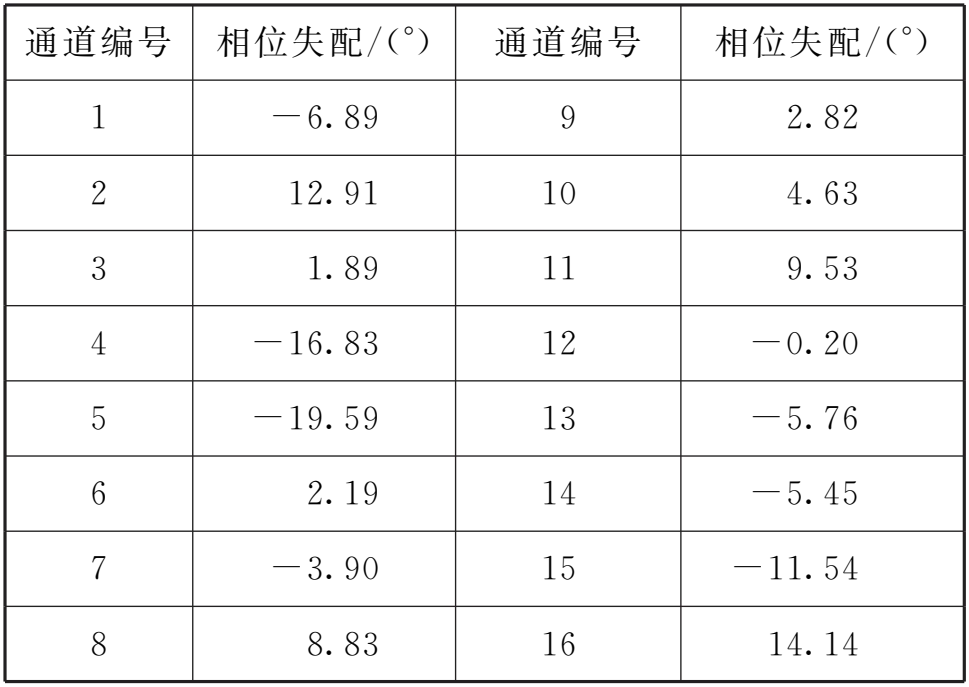
表1 各通道的相位失配
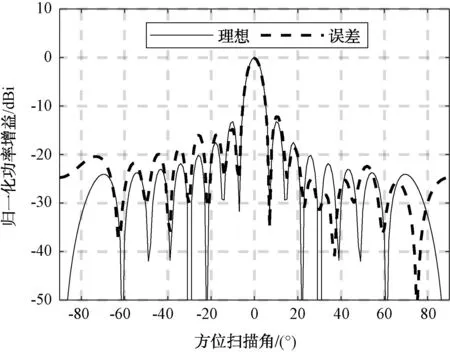
圖2 理想方向圖與相位失配方向圖對比
(4)
式中:b為帶寬。
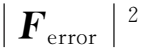
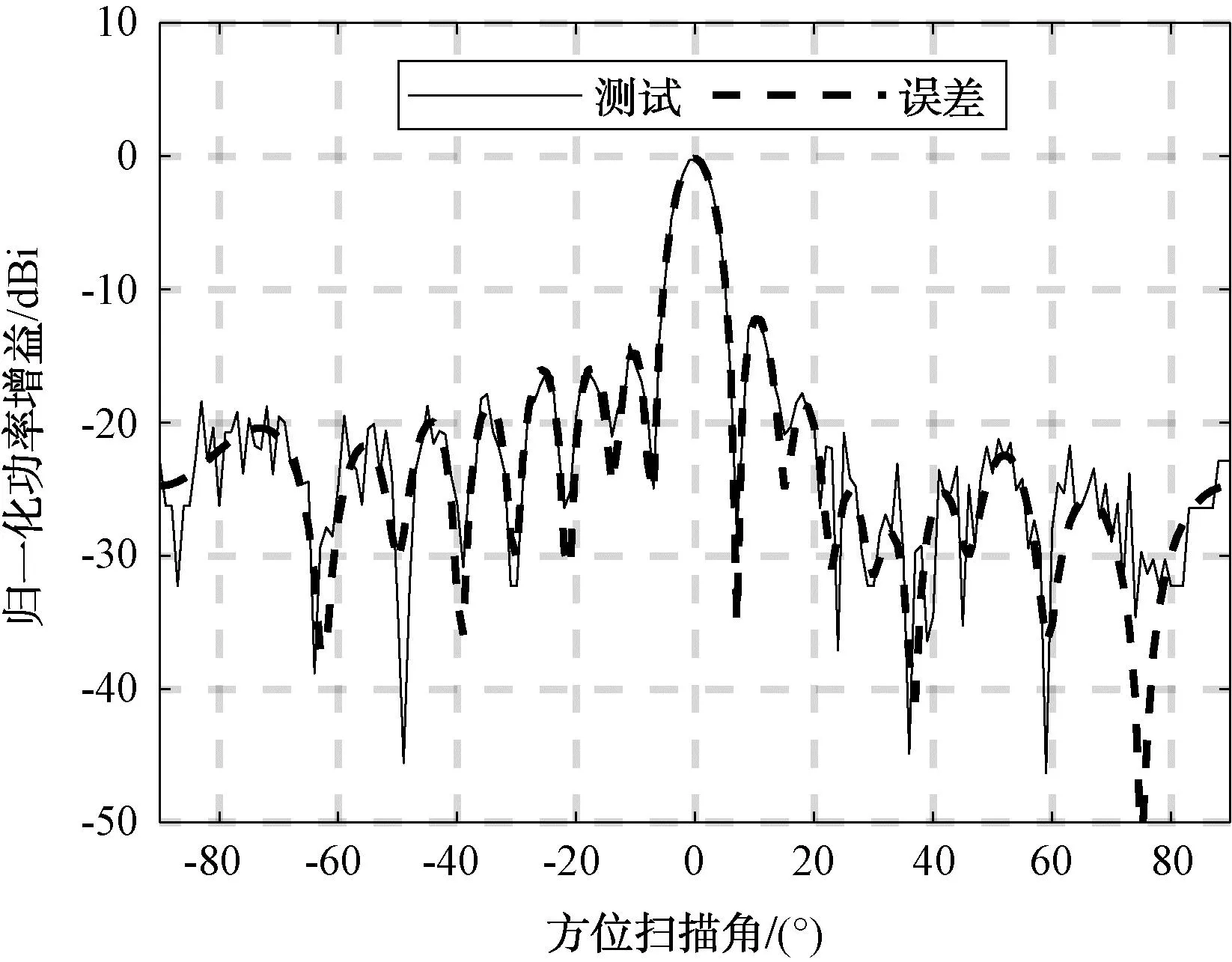
圖3 測試仿真方向圖與相位失配誤差方向圖對比
2 引入隨機虛擬相移的均值方法與仿真
為了平滑圖3直接測試得到方向圖,對每個來波方向引入M組隨機虛擬相移(RVPS)Θ(m,n,θ)。可以假定該相移滿足均值為零、方差為Pstep/2的正態分布,Θ~N(0,Pstep/2),需要注意的是該虛擬相移只是用于消除系統相關相位誤差,即式(3)在計算時使用ωndsinθ/c+Θ(m,n,θ),而不是ωndsinθ/c。在得到P(m,n,θ)后,通過式(5)計算得到平均后的陣因子方向圖:
(5)
引入RVPS后的整個測試流程如圖4所示,上位機控制信號收發產生ω單音信號,再控制DUT波束合成指向θB方向,生成M組隨機虛擬相移,對空間來波方向θ進行計算并控制波束控制器的各通道,測試得到的原始數據流經過快速傅里葉變換(FFT)后,得到最大值的幅度和相位并存儲,循環遍歷測試得到M個幅度和相位,根據式(5)求平均得到θ方向的相應幅度,循環遍歷方位角空間,最終繪制方向圖。
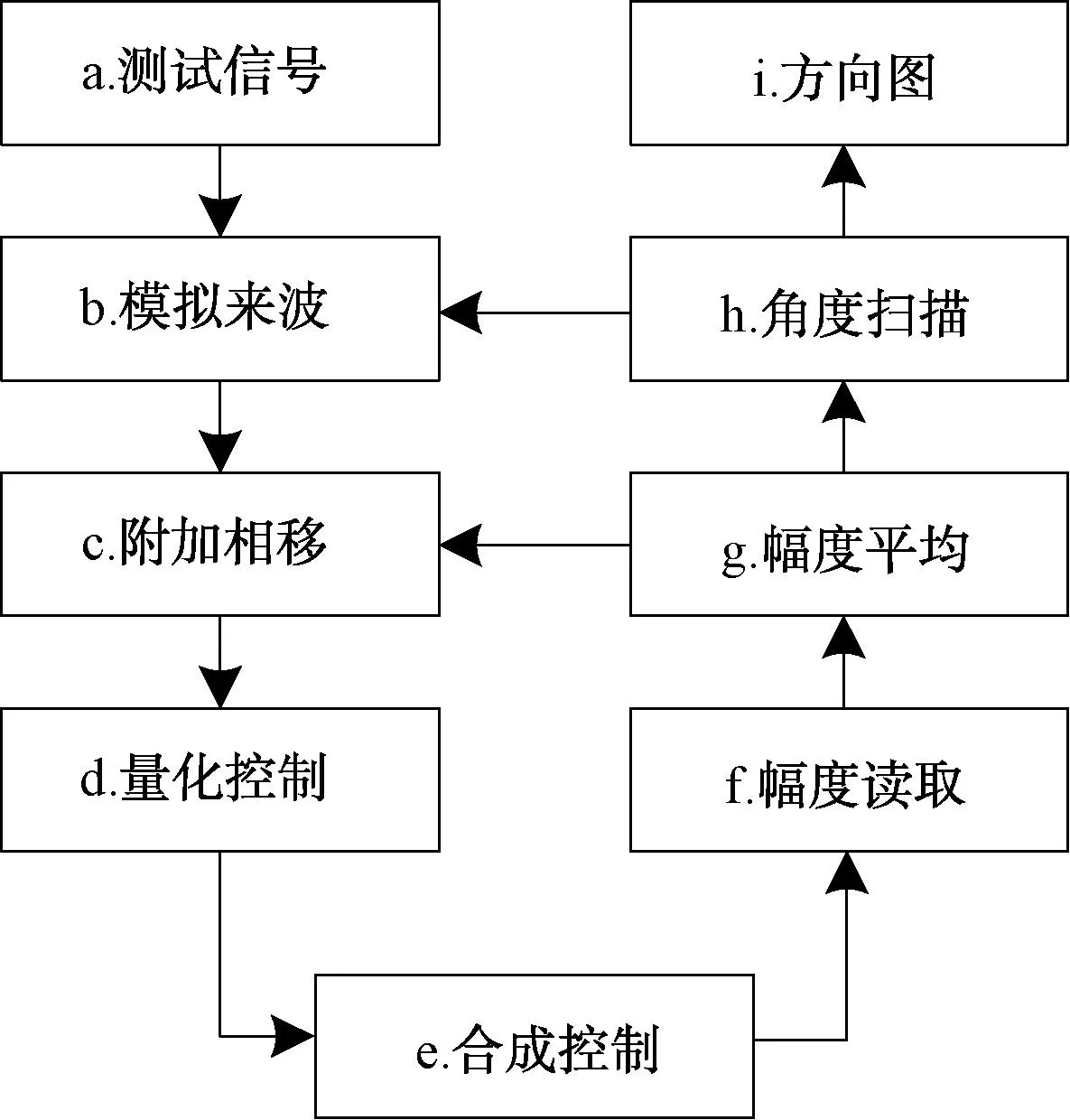
圖4 基于RVPS的均值方向圖測試流程
依然采用第1節的仿真參數,同時設置M=15,對比圖3和圖5可知,引入RVPS的均值測試方法能夠有效減小測試結果與誤差方向圖的偏離程度,使得遠旁瓣、零點位置以及調零深度的測試更加準確。表2進一步對比了波束控制器不同移相步進,對比直接測試和引入隨機虛擬相移測試的σmeasure,σmeasure的值明顯減小,驗證了方法的有效性。
表2 不同相位步進精度下σmeasure對比
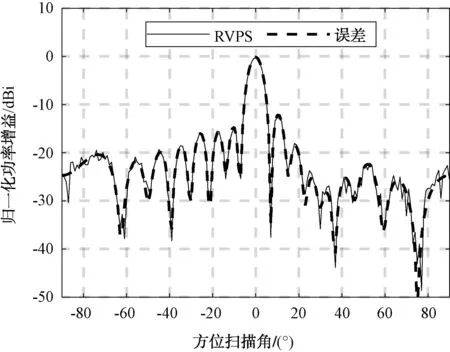
圖5 RVPS測試與相位失配誤差方向圖的對比
3 實測驗證
依據圖1所示框架搭建實際模擬波束測試系統,需要考慮信號收發方案和波束控制方案。
信號收發可以采用矢量網絡分析儀、信號源和頻譜儀以及軟件無線電收發平臺3種方案實現,使用式(5)描述的方法需要2個條件:觸發可控的發射正弦信號以及包含幅度和相位信息的接收信號。矢量網絡分析儀雖然能夠獲得幅相信息,但難以實現觸發控制,而信號源和頻譜儀只能獲得幅度信息,軟件無線電收發平臺可以通過波形設計和硬件配置滿足上述2個條件。
波束控制器可以選擇移相、時延、移相結合時延3種方案實現。移相器方案的優勢是可以跨周期使用,因此陣列尺寸和掃描角度不受限制,但寬帶測試時每個頻率都需要獨立設置,測試效率低,同時可選移相器的頻率覆蓋范圍相對較窄;時延方案的優點在于寬帶測試效率較高,同時射頻覆蓋范圍較寬,缺點是真時延無法跨周期使用,陣列尺寸和掃描角度受限;移相結合時延能夠結合二者的優點,但實現較復雜且成本較高。
實際搭出的測試系統如圖6所示。綜合考慮實現成本、便攜性、頻率覆蓋范圍和寬帶測試的需求,選擇基于ADRV9009+ZC706的軟件無線電收發平臺完成信號收發,該平臺能夠實現75~6 000 MHz的單音信號實時收發。采用1入16出、工作頻率覆蓋0.5~6 GHz的時延波控器實現波束控制,該時延器通道間幅度不一致性<±1 dB,延時置零狀態下相位不一致<±5°,時延控制8位,時延步進為14 ps,最大時延量>7 154 ps。驗證待測DUT選擇1個16入1出、工作頻率為0.5~6 GHz的合路器。
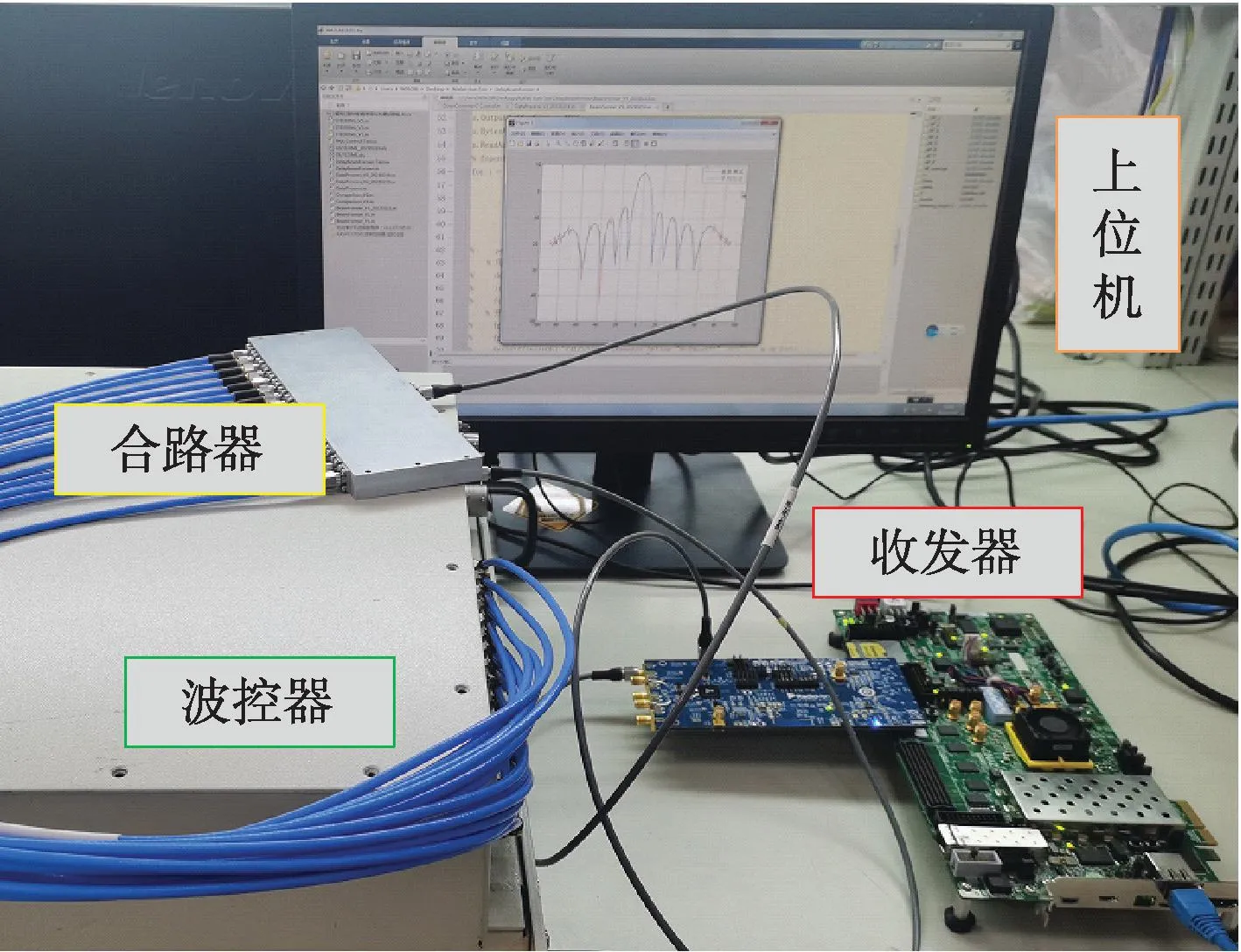
圖6 實際搭建的測試系統
圖7為工作頻率1.8 GHz、單元間距50 mm的16單元ULA方向圖測試結果,DUT合路器不包含波束掃描功能,因此方向圖主波束指向0°。對比了直接測試方法和平均測試方法,平均測試方法在大角度波動上遠小于直接測量方法。
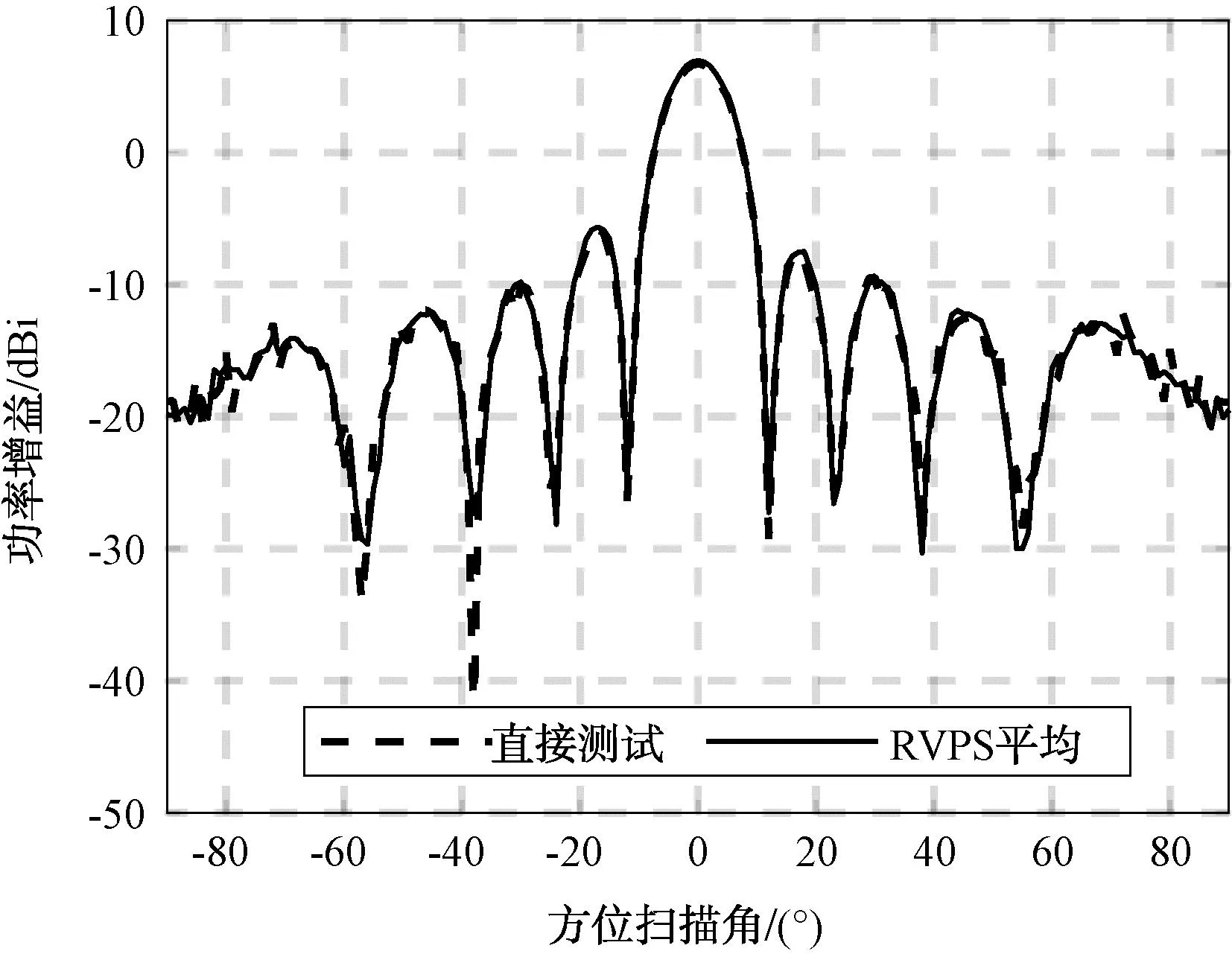
圖7 頻率1.8 GHz方向圖對比
圖8為工作頻率3.8 GHz、單元間距30 mm的16單元ULA方向圖測試結果。同1.8 GHz測試相同,平均方法有效降低了方向圖大角度部分的波動,但3.8 GHz方向圖整體上波動要大于1.8 GHz方向圖。
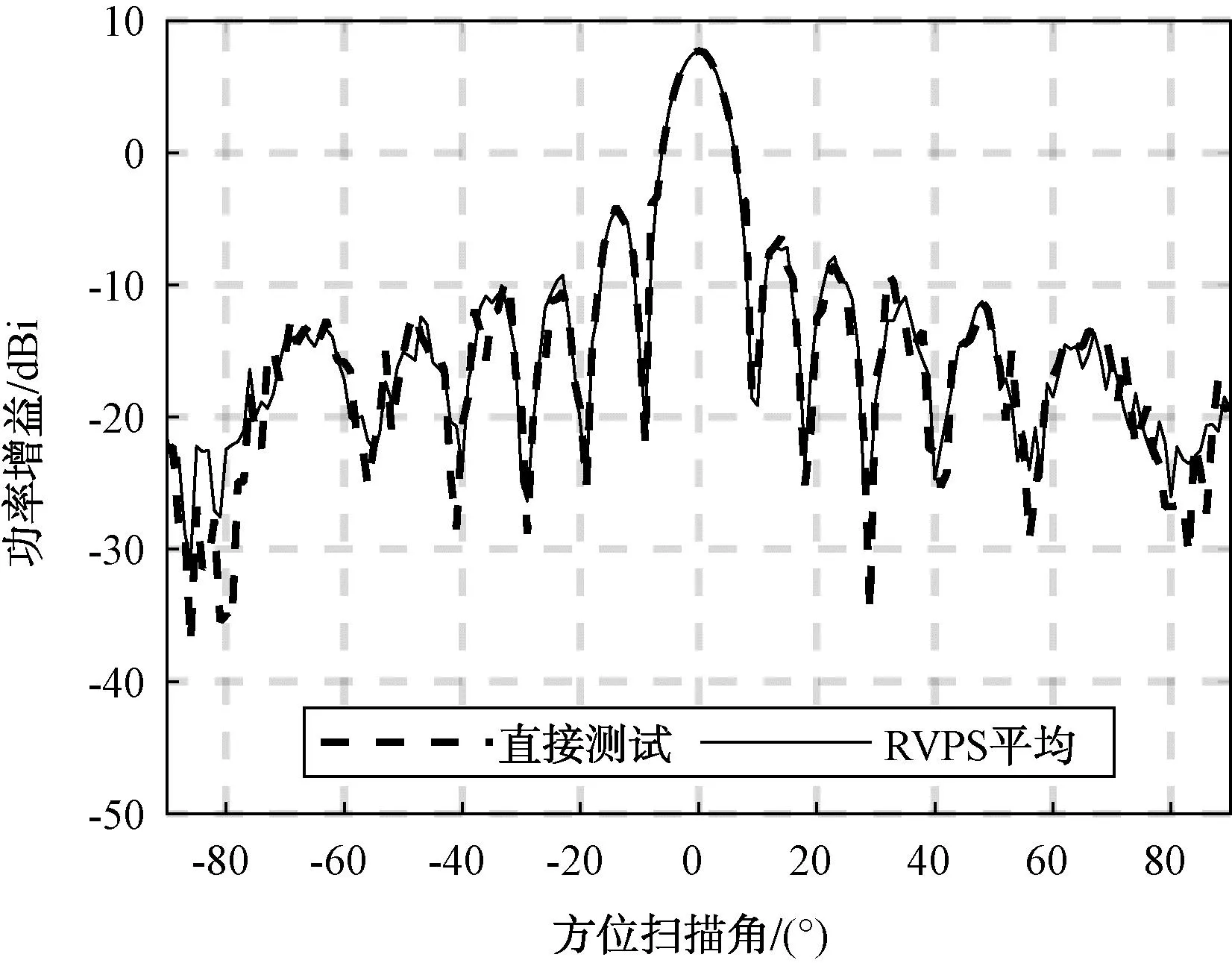
圖8 頻率3.8 GHz方向圖對比
經過實際測試驗證,圖6所示的系統能夠完成對DUT的方向圖測試,所提出的RVPS方法也能夠降低由于量化所導致的測試波動,但從圖7和圖8的測試結果看,需要進一步討論和改進以下2點。
首先,測試系統包含波控器本身性能的影響,一方面,波控器本身存在損耗或增益,得到的法向增益也同理論的10·lg16=12.04有差距;另一方面,波控器通道間幅相不一致性、不同時延態下的附加損耗和相移都會影響副瓣電平和調零深度的測試結果。
其次,量化時延導致方向圖畸變,在高頻影響比在低頻嚴重,這是由于采用14 ps量化時延,它在1.8 GHz頻率所對應的相位誤差為±4.5°,而在3.8 GHz所對應的相位誤差為±9.6°,因此圖8所示的方向圖測試結果要比圖7差。
要改進以上2點,可以通過使用移相器結合時延方案代替單純時延線方案來實現,也可以通過減小時延步進來實現,但在測試準確度和精確度提升的同時,也增加了測試系統的復雜度和成本。
所提出的測試系統特點是容易搭建且軟件工作量少,主要適用于低成本的快速評估陣列性能和算法,如果需要高精度的測試,采用數字實現的陣列信號模擬器可能是更好的選擇[5]。
4 結束語
提出了一種低成本的接收陣列方向圖測試系統提高測試精度的方法。該系統不依賴外場條件與陣列的物理排布,能夠適應數字陣列體制和模擬陣列體制的收發測試,適合用于評估射頻與數字鏈路、波束合成以及干擾調零等性能。本文對于提高數字陣列研發效率和降低測試復雜度具有一定的工程價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45