基于肌電控制的半定制柔性康復(fù)訓(xùn)練手套
2024-03-31 05:33:10劉彩霞余宏波劉貴乾
劉彩霞, 馬 菲, 余宏波, 劉貴乾, 郭 旭, 黃 英
(1.合肥工業(yè)大學(xué) 物理學(xué)院,安徽 合肥 230601; 2.合肥工業(yè)大學(xué) 微電子學(xué)院,安徽 合肥 230601)
“腦卒中”是一種危害大、發(fā)病率高的急性腦血管疾病[1],部分腦卒中患者遺留手部功能障礙,中風(fēng)后3個(gè)月是康復(fù)訓(xùn)練的黃金時(shí)期[2],但是患者憑借自身難以控制和協(xié)調(diào)手部肌肉完成康復(fù)訓(xùn)練[3],基于康復(fù)訓(xùn)練設(shè)備的手部康復(fù)訓(xùn)練對(duì)于患者手功能恢復(fù)能起到重要促進(jìn)作用[4-5]。
手部康復(fù)訓(xùn)練設(shè)備從結(jié)構(gòu)上主要分為剛性執(zhí)行機(jī)構(gòu)[6-7]和柔性執(zhí)行機(jī)構(gòu)[8]。剛性執(zhí)行機(jī)構(gòu)是通過剛性構(gòu)件將驅(qū)動(dòng)力傳遞到人手并帶動(dòng)手指運(yùn)動(dòng)的手部康復(fù)訓(xùn)練設(shè)備,這類執(zhí)行機(jī)構(gòu)約束關(guān)節(jié)的驅(qū)動(dòng)自由度并阻礙其自然運(yùn)動(dòng),舒適性和安全性較差。相較之下,柔性執(zhí)行機(jī)構(gòu)因結(jié)構(gòu)簡(jiǎn)單、舒適性和安全性較高、與人手貼合度高等特點(diǎn),近年來發(fā)展迅速并逐漸成為康復(fù)訓(xùn)練方向研究的熱點(diǎn)。柔性機(jī)構(gòu)驅(qū)動(dòng)方式[9-10]種類繁多,例如形狀記憶合金(shape memory alloys,SMA)驅(qū)動(dòng)、電活性聚合物驅(qū)動(dòng)、磁驅(qū)動(dòng)和氣動(dòng)驅(qū)動(dòng)等。SMA驅(qū)動(dòng)材料驅(qū)動(dòng)頻率低、輸出力較小;電活性聚合物耦合驅(qū)動(dòng)速度慢、效率低;磁驅(qū)動(dòng)受磁線圈的影響,制造過程比較復(fù)雜;相較于以上驅(qū)動(dòng)方式,氣動(dòng)驅(qū)動(dòng)技術(shù)成熟、反應(yīng)速度較快、控制簡(jiǎn)單,被廣泛應(yīng)用于手部康復(fù)訓(xùn)練設(shè)備。目前已有不少采用氣動(dòng)驅(qū)動(dòng)方式制作的康復(fù)訓(xùn)練設(shè)備。文獻(xiàn)[11]研制的康復(fù)訓(xùn)練手套集成了5個(gè)軟纖維增強(qiáng)型執(zhí)行器,能夠起到較好的訓(xùn)練效果,但該手套需要較大驅(qū)動(dòng)力,與人手的貼合度較差;文獻(xiàn)[12]通過改變指節(jié)單元不同部位纖維增強(qiáng)體結(jié)構(gòu),讓執(zhí)行器在運(yùn)動(dòng)過程中很好地貼合手部,同時(shí)避免了約束平臺(tái)結(jié)構(gòu),但該執(zhí)行器在設(shè)計(jì)過程需要復(fù)雜的跟蹤傳感器輔助且制作工藝復(fù)雜;文獻(xiàn)[13]采用均勻氣腔研制MRC-Glove輔助人手彎曲,提高了指節(jié)單元與手指的貼合度,但驅(qū)動(dòng)過程需要復(fù)雜的約束平臺(tái)。
除結(jié)構(gòu)以外,控制方法也是決定康復(fù)訓(xùn)練設(shè)備訓(xùn)練效果的重要因素。目前,國內(nèi)外科研機(jī)構(gòu)的康復(fù)訓(xùn)練設(shè)備都以被動(dòng)式控制[14-15]為主,康復(fù)訓(xùn)練周期較長(zhǎng),效果較弱。文獻(xiàn)[16]進(jìn)行了控制方式的創(chuàng)新,提出一種基于三維手勢(shì)體感(Leap Motion)傳感器的康復(fù)訓(xùn)練設(shè)備;但是基于三維手勢(shì)識(shí)別的控制需要使用者做出手勢(shì)并完成識(shí)別后才能完成控制,仍然無法實(shí)現(xiàn)主動(dòng)控制。
綜合考慮康復(fù)訓(xùn)練設(shè)備的執(zhí)行機(jī)構(gòu)和控制方法,本文基于肌電控制設(shè)計(jì)一種半定制主動(dòng)式柔性氣動(dòng)康復(fù)訓(xùn)練手套。借助ABAQUS軟件進(jìn)行仿真設(shè)計(jì)手套結(jié)構(gòu)尺寸,通過研究符合手部特征的單指執(zhí)行器單元確定各個(gè)氣腔尺寸,設(shè)計(jì)長(zhǎng)、短指節(jié)并用長(zhǎng)度可調(diào)節(jié)的連接部件連接;制作工藝方面,基于3D打印技術(shù)和流體自成型技術(shù)制作執(zhí)行器并集成到織物手套上;控制方法上,采用表面肌電控制方案,利用支持向量機(jī)(support vector machine,SVM)算法實(shí)現(xiàn)手勢(shì)分類,完成對(duì)自制柔性康復(fù)訓(xùn)練手套的主動(dòng)式控制。制作的柔性康復(fù)手套具有與手部貼合度高且結(jié)構(gòu)簡(jiǎn)單的特點(diǎn),可以進(jìn)行抓取和鏡像康復(fù)訓(xùn)練,康復(fù)訓(xùn)練具有積極的效果。
1 柔性手套的設(shè)計(jì)與制作
柔性康復(fù)訓(xùn)練手套設(shè)計(jì)制作包括單指執(zhí)行器單元的設(shè)計(jì)、仿真和測(cè)試以及長(zhǎng)、短指節(jié)的制作和測(cè)試。
1.1 單指執(zhí)行器單元的設(shè)計(jì)
本文康復(fù)訓(xùn)練手套是通過充氣使氣腔膨脹相互擠壓完成彎曲行為的。為提高手套單指執(zhí)行器單元在彎曲過程中與手指的貼合度,設(shè)計(jì)手指的關(guān)節(jié)部位對(duì)應(yīng)多個(gè)小氣腔,指節(jié)部分僅保留較窄的氣道。人手彎曲、均勻氣腔及非均勻氣腔的單指執(zhí)行器單元如圖1a所示,可以看出具有均勻氣腔的指節(jié)單元彎曲時(shí)呈半圓形。均勻氣腔模型和非均勻氣腔模型與人體手指彎曲的對(duì)比如圖1b所示,可以看出均勻氣腔模型明顯不符合人體手部彎曲特征,與人手部貼合性較差,而非均勻氣腔模型更適合人手部特征。
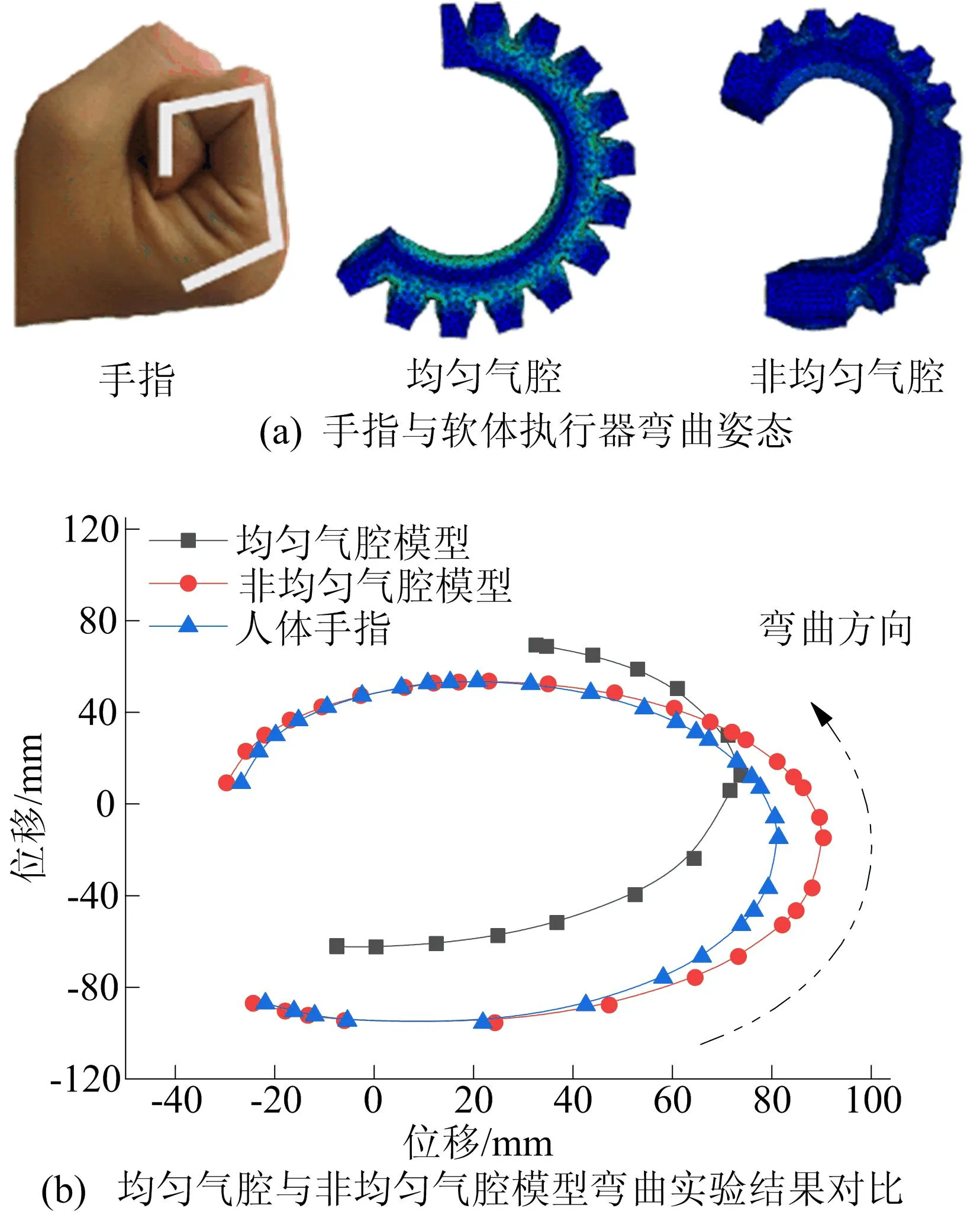
圖1 模型運(yùn)動(dòng)軌跡分析
為擴(kuò)大執(zhí)行器的適用范圍,考慮到人手從靠近手掌近側(cè)指骨開始分為近節(jié)指骨、中節(jié)指骨、遠(yuǎn)節(jié)指骨,且不同人手指在近節(jié)指骨部分差異最大,將執(zhí)行器設(shè)計(jì)成長(zhǎng)、短指節(jié),并借助長(zhǎng)度可調(diào)連接部件相連。
單指執(zhí)行器單元如圖2所示。從圖2可以看出,手指遠(yuǎn)節(jié)指骨、中節(jié)指骨對(duì)應(yīng)長(zhǎng)指節(jié),近節(jié)指骨對(duì)應(yīng)短指節(jié),長(zhǎng)、短指節(jié)由可任意尺寸調(diào)整更換的連接部件連接。
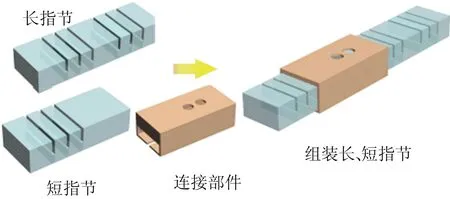
圖2 單指執(zhí)行器單元
1.2 非線性力學(xué)建模與仿真
康復(fù)訓(xùn)練手套的單指執(zhí)行器單元采用硅橡膠材料制作,軟材料具有非線性力學(xué)特性,由非線性力學(xué)理論[17]分析可知,幾何尺寸參數(shù)是影響氣腔彎曲性能的主要因素。
影響氣腔彎曲角度θ的主要參數(shù)有內(nèi)部氣腔壓強(qiáng)p、氣腔高度h、底層厚度d。氣腔膨脹前、后的示意圖如圖3a所示,可以通過控制變量法進(jìn)行有限元分析。
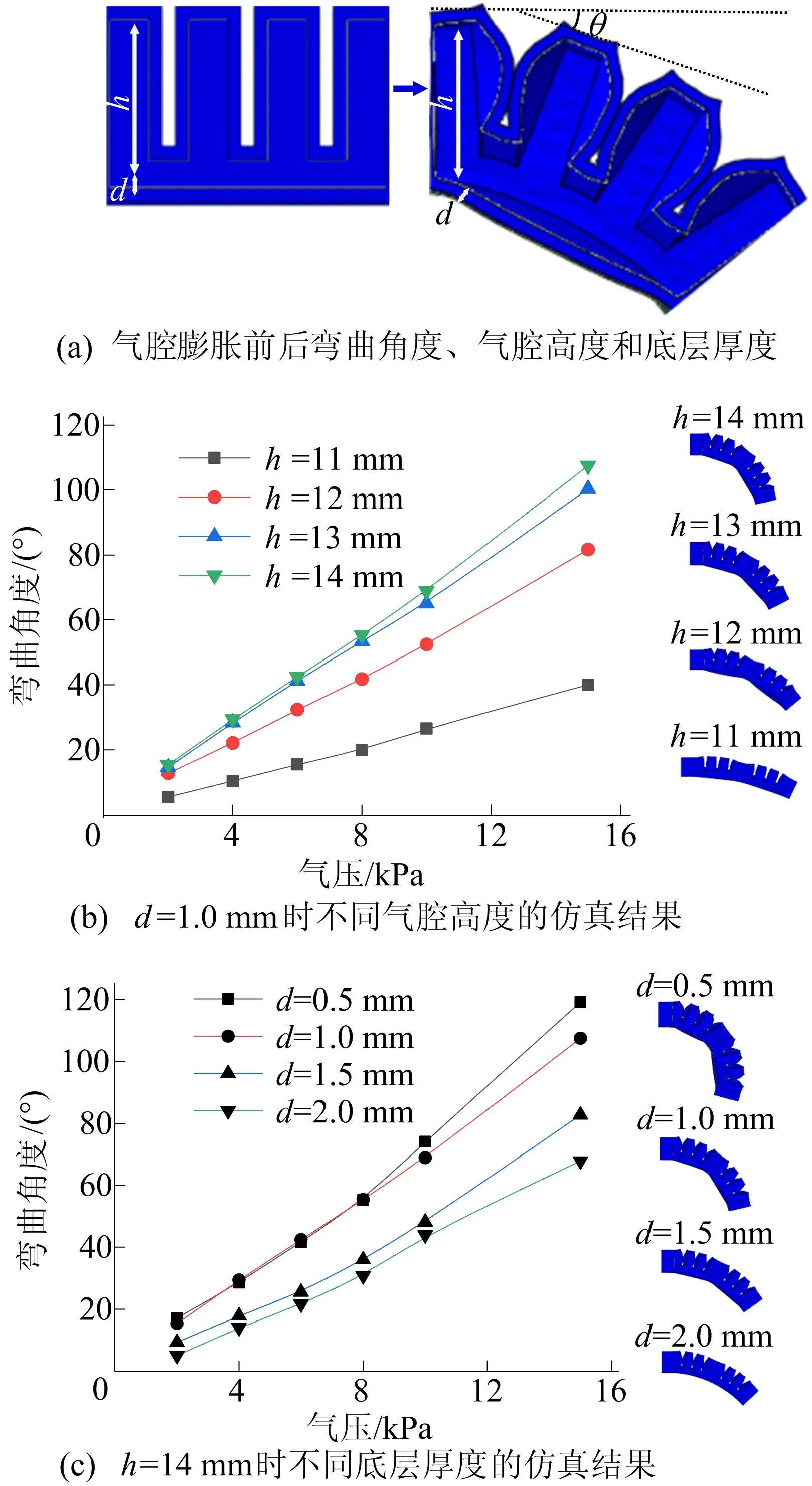
圖3 指節(jié)彎曲角度仿真結(jié)果
當(dāng)d=1.0 mm,h為11、12、13、14 mm時(shí)的指節(jié)彎曲角度仿真結(jié)果如圖3b所示。從圖3b可以看出,在相同底層厚度和氣壓下,隨著氣腔高度h的增加,彎曲角度呈現(xiàn)增大趨勢(shì),且彎曲角度隨著內(nèi)部氣壓的增大而增大。但氣腔高度h過高不易裝配,根據(jù)仿真結(jié)果,選擇h=14 mm作為氣腔高度參數(shù)。
當(dāng)h=14 mm,d為0.5、1.0、1.5、2.0 mm的指節(jié)彎曲角度仿真結(jié)果如圖3c所示。從圖3c可以看出,在相同氣腔高度和氣壓下,隨著底層厚度d的增加,彎曲角度呈現(xiàn)減小的趨勢(shì),且彎曲角度隨著內(nèi)部氣壓的增大而增大。
由仿真結(jié)果可知d=0.5 mm時(shí)彎曲效果最好,但底層厚度過小會(huì)導(dǎo)致無法加入限制層且存在漲破風(fēng)險(xiǎn),而底層厚度過大會(huì)降低軟體執(zhí)行器柔性,氣壓驅(qū)動(dòng)時(shí)彎曲角度達(dá)不到手指彎曲范圍,根據(jù)仿真結(jié)果,選擇d=1.0 mm作為底層厚度參數(shù)。
1.3 執(zhí)行器指節(jié)制作
基于3D打印技術(shù)制作氣動(dòng)執(zhí)行器模具,制作短指節(jié)流程如圖4所示。
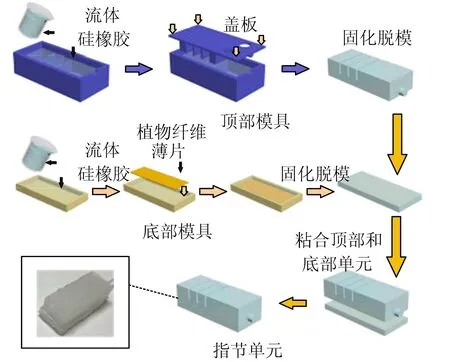
圖4 執(zhí)行器指節(jié)單元制作過程
設(shè)計(jì)并使用聚乳酸(polylactic acid,PLA)材料3D打印總體長(zhǎng)43 mm、寬18 mm、高14 mm的頂部模具,總體長(zhǎng)43 mm、寬18 mm、高1 mm的底部模具。紅葉E615硅橡膠A、B膠以1∶1的質(zhì)量比混合配置,將混合得到的流體硅橡膠放入真空機(jī)內(nèi)抽真空去除氣泡。在頂部模具中倒入流體硅橡膠,將同樣使用PLA材料3D打印定制的長(zhǎng)45 mm、寬20 mm、梳齒高14 mm的蓋板嵌入流體硅橡膠,室溫靜置24 h后固化脫模,得到內(nèi)部氣腔高度h=14 mm、底層厚度d=1 mm的頂部模塊;取底部模具,倒入流體硅橡膠,待硅橡膠還未凝固時(shí),向硅橡膠中置入植物纖維薄片作為應(yīng)變限制層,室溫靜置24 h固化脫模得到底部模塊,并與頂部模塊粘合,組合可以得到短指節(jié)。
利用同樣方法制作長(zhǎng)59 mm、寬18 mm、內(nèi)部氣腔高度h=14 mm的長(zhǎng)指節(jié)。使用TPU軟膠柔性彈性體3D打印制作長(zhǎng)45 mm、寬20 mm、高14 mm的連接部件,制備單指執(zhí)行器單元。
1.4 長(zhǎng)、短指節(jié)及單指執(zhí)行器單元性能測(cè)試
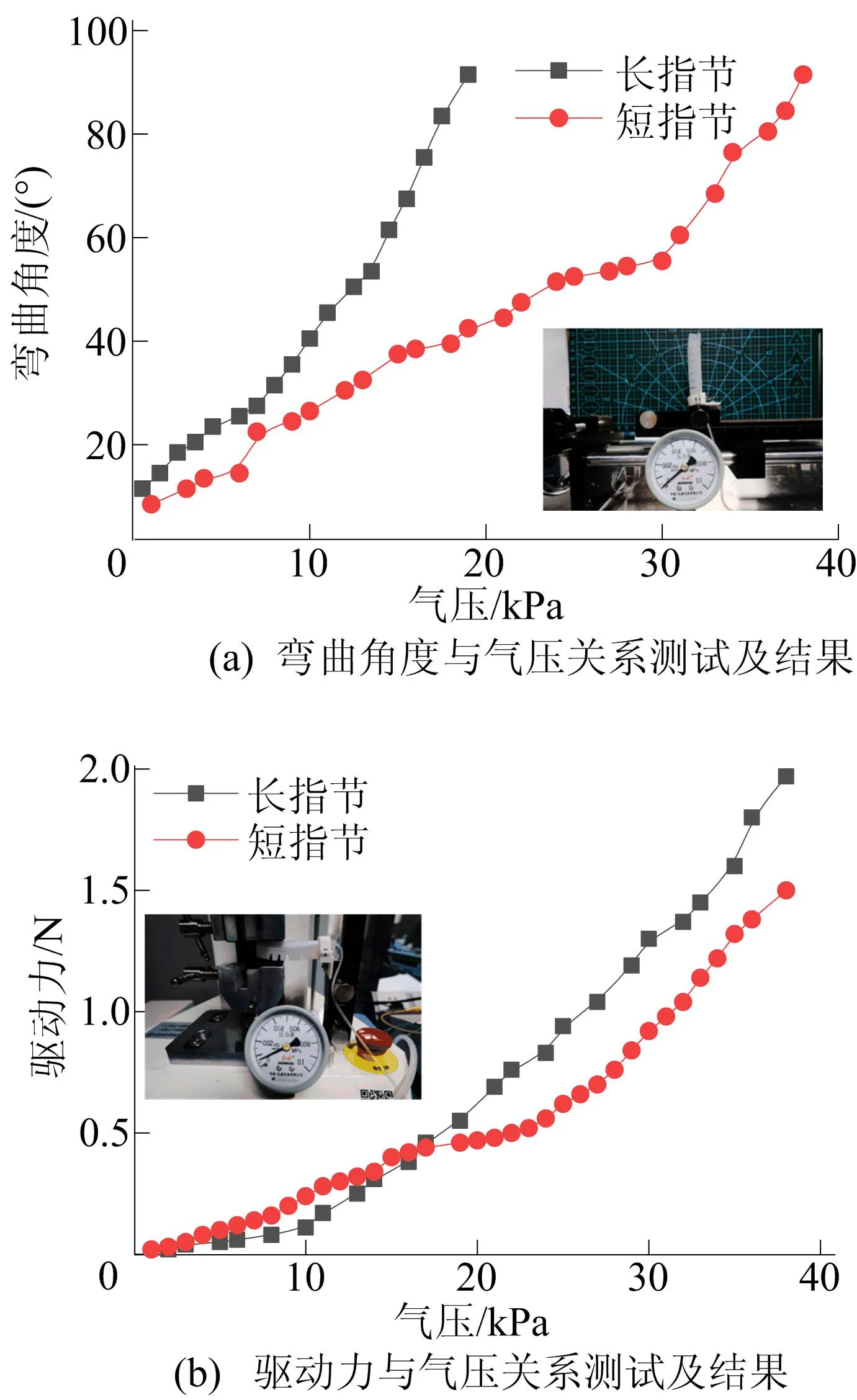
對(duì)長(zhǎng)、短指節(jié)彎曲角度與氣壓關(guān)系、驅(qū)動(dòng)力與氣壓關(guān)系進(jìn)行測(cè)量,結(jié)果如圖5所示。其中,圖5a、圖5b中的插圖為測(cè)量裝置。
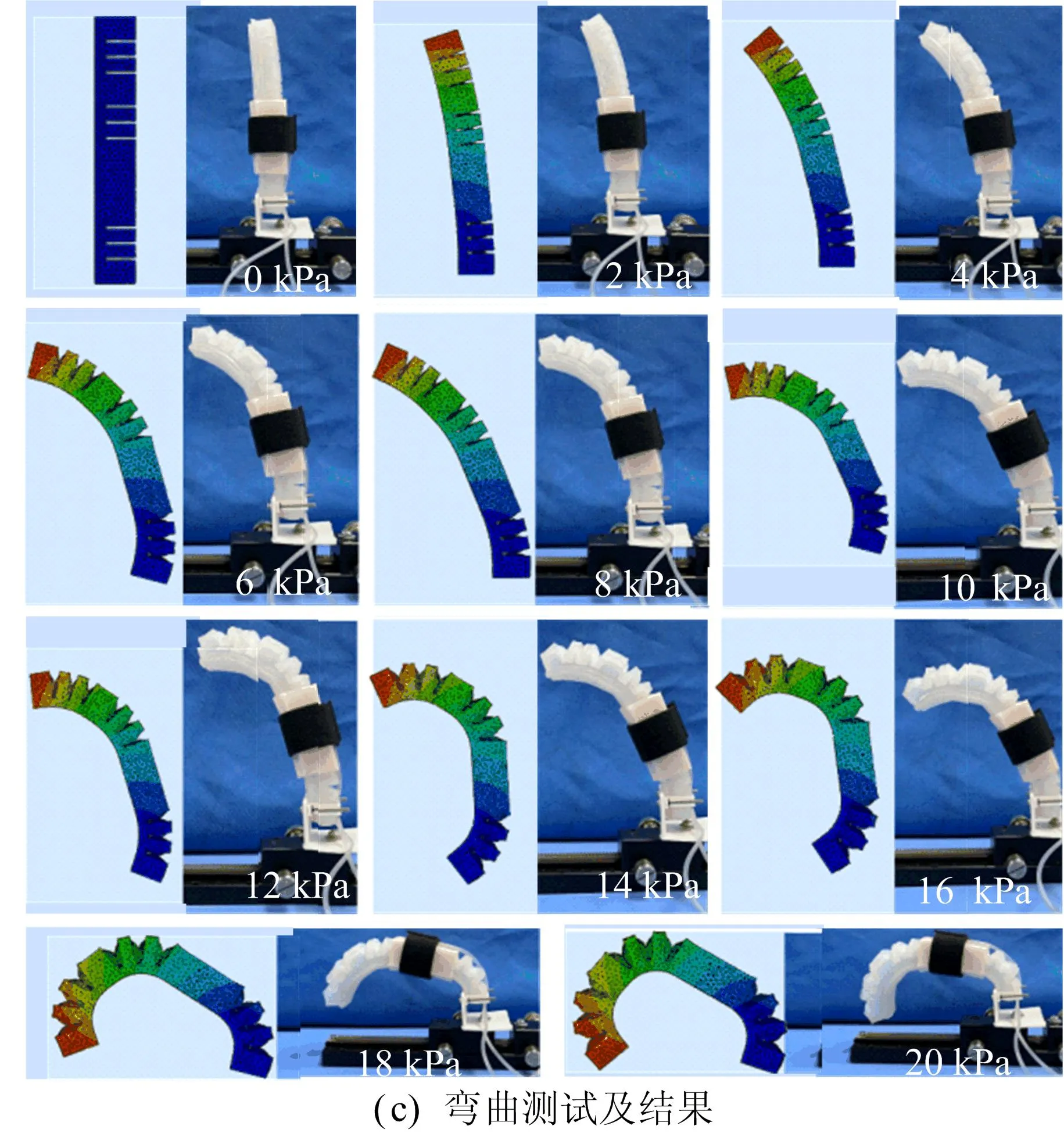
圖5 彎曲角度與氣壓關(guān)系、驅(qū)動(dòng)力與氣壓關(guān)系、彎曲測(cè)試及結(jié)果
從圖5a可以看出,在內(nèi)部氣壓20 kPa時(shí),長(zhǎng)、短指節(jié)分別彎曲90°、40°;從圖5b可以看出,長(zhǎng)、短指節(jié)在內(nèi)部氣壓為17 kPa時(shí)內(nèi)側(cè)驅(qū)動(dòng)力為0.50 N。
對(duì)單指執(zhí)行器單元進(jìn)行彎曲測(cè)試,結(jié)果如圖5c所示。
從圖5c可以看出,內(nèi)部氣壓為0~20 kPa時(shí),實(shí)物彎曲結(jié)果與仿真結(jié)果具有高度一致性。
2 肌電控制方案
控制方案的設(shè)計(jì)主要包括信號(hào)采集處理和氣動(dòng)控制系統(tǒng)的設(shè)計(jì)。表面肌電信號(hào)[18]是眾多生物電信號(hào)中一種容易獲取的生理反饋信號(hào),在運(yùn)動(dòng)意圖識(shí)別上有較高的精確性和魯棒性。在人體小臂肌肉處采集表面肌電信號(hào),并結(jié)合SVM算法用于判斷人手的運(yùn)動(dòng)意圖,進(jìn)而實(shí)現(xiàn)主動(dòng)控制執(zhí)行器的運(yùn)動(dòng)。
2.1 肌電信號(hào)的采集處理
采用Myoware肌電傳感器和生理電極片對(duì)肌電信號(hào)采集。Myoware傳感器的2個(gè)采集電極和1個(gè)參考電極與生理電極片連接,粘貼在人體小臂肱橈肌處和關(guān)節(jié)處,采集微弱肌電信號(hào)并放大,通過濾波電路有效抑制噪音,再利用Arduino UNO單片機(jī)進(jìn)行特征提取。
肌電信號(hào)具有模糊性特點(diǎn),不同使用者在相同肌肉塊采集的表面肌電信號(hào)具有較大差別,同一使用者在不同時(shí)間采集的肌電信號(hào)也有一定的差別,特征提取是肌電控制的重要環(huán)節(jié)。肌電信號(hào)特征包括時(shí)域特征、頻域特征、時(shí)頻域特征[19],不同手勢(shì)的時(shí)域特征差異較大,因此提取時(shí)域特征進(jìn)行分類。
對(duì)握拳、拇指與其他4指對(duì)指的5種手勢(shì)識(shí)別的肌電波形和特征進(jìn)行提取,不同手勢(shì)肌電波形如圖6a所示。
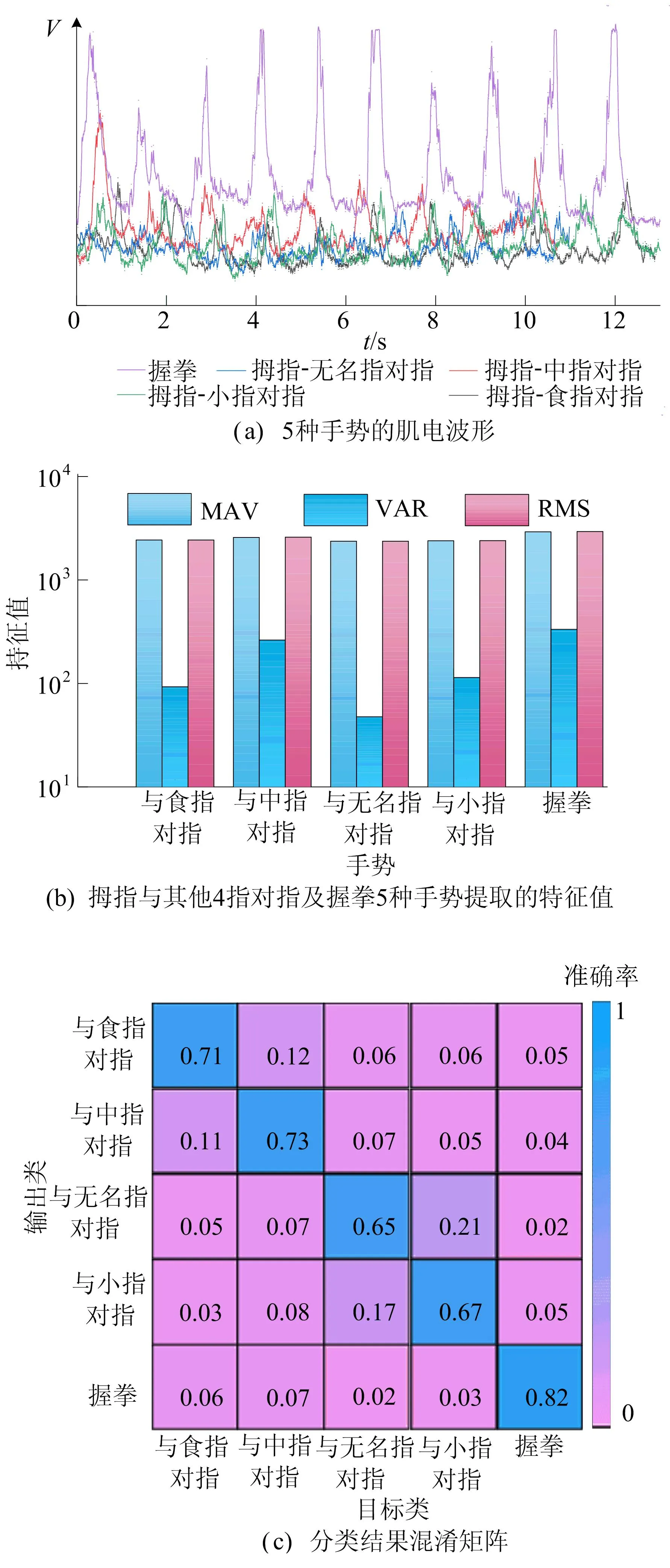
圖6 肌電信號(hào)采集與處理
綜合考慮執(zhí)行時(shí)間、系統(tǒng)延時(shí)以及肌電信號(hào)的模糊與不平穩(wěn)特征,每30 ms對(duì)濾波后的表面肌電信號(hào)進(jìn)行檢測(cè),每次對(duì)30 ms內(nèi)的表面肌電信號(hào)的最大評(píng)估值(maximum assessed value, MAV)、方差(variance, VAR)、均方根(root mean square, RMS)進(jìn)行提取,結(jié)果如圖6b所示。
由于肌電傳感器的裝配位置不同,當(dāng)做出不同手勢(shì)時(shí),牽動(dòng)的肌肉群與肌電傳感器間具有空間差異,傳感器采集的肌電信號(hào)幅值與波形存在差異,本文通過SVM算法進(jìn)一步對(duì)信號(hào)進(jìn)行分類。采用十折交叉驗(yàn)證方式得到分類的準(zhǔn)確率,分類結(jié)果混淆矩陣如圖6c所示。
從圖6c可以看出:采用時(shí)域特征對(duì)5種手勢(shì)分類效果較好;握拳手勢(shì)與其他手勢(shì)時(shí)域差異較大,具有最高識(shí)別率;拇指-無名指對(duì)指、拇指-小指對(duì)指動(dòng)作牽動(dòng)的肌肉群一致性較高,識(shí)別率相對(duì)較低。5種手勢(shì)識(shí)別準(zhǔn)確率較高,說明該識(shí)別結(jié)果可用于控制康復(fù)手套進(jìn)而實(shí)現(xiàn)鏡像康復(fù)訓(xùn)練。
2.2 氣動(dòng)控制系統(tǒng)的設(shè)計(jì)
表面肌電信號(hào)來源于神經(jīng)細(xì)胞,產(chǎn)生于肌肉收縮前30~150 ms,降低氣動(dòng)系統(tǒng)延時(shí)可起到良好的主動(dòng)控制效果,輔助完成鏡像康復(fù)訓(xùn)練。氣動(dòng)系統(tǒng)設(shè)計(jì)過程如圖7所示。
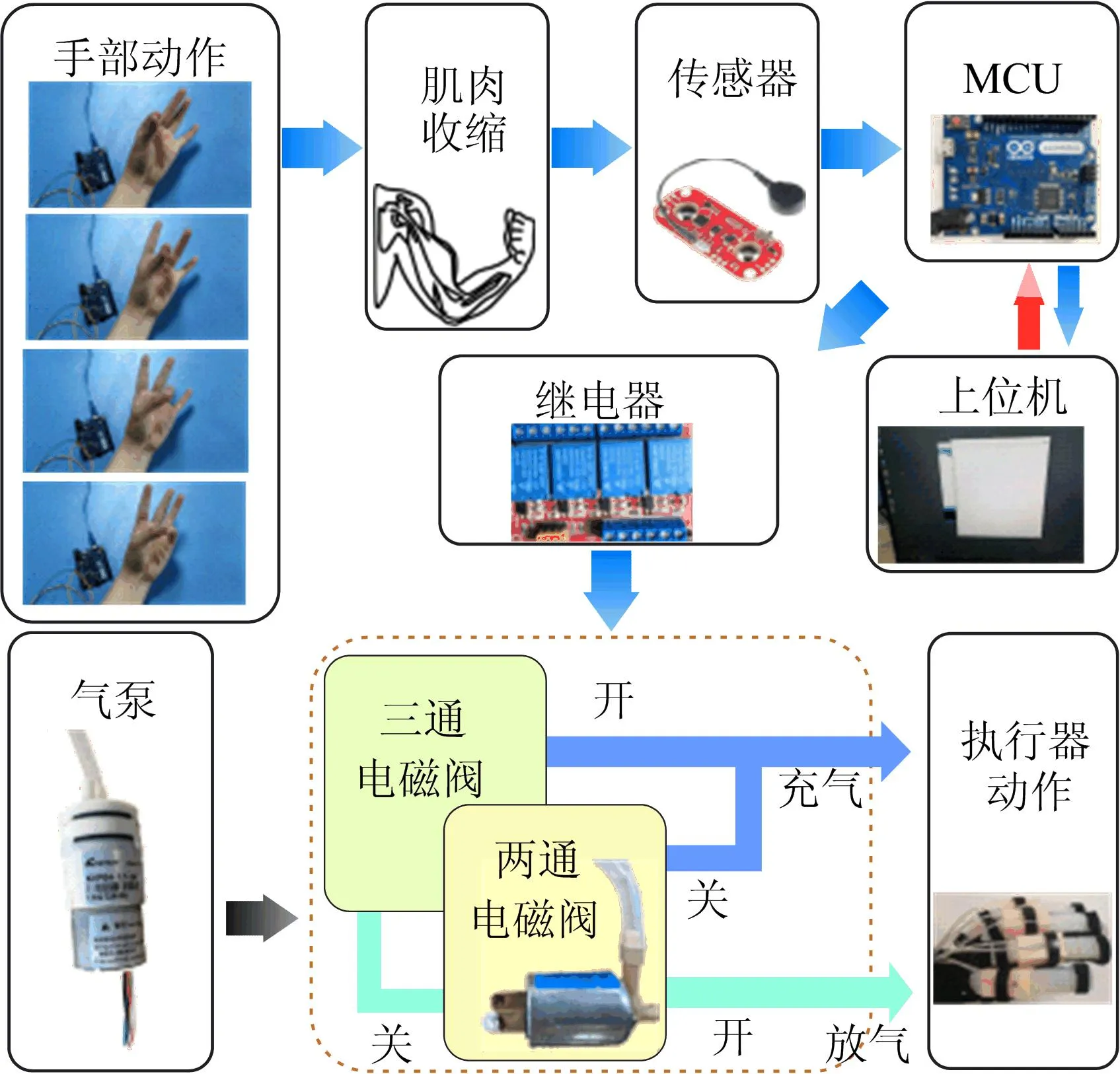
圖7 氣動(dòng)控制系統(tǒng)設(shè)計(jì)過程
將一只手佩戴康復(fù)訓(xùn)練設(shè)備,另一只手依次做出拇指與食指對(duì)指、中指對(duì)指、無名指對(duì)指、小拇指對(duì)指動(dòng)作,利用Myoware傳感器采集相應(yīng)手勢(shì)的肌電信號(hào),輸出至單片機(jī)通過上位機(jī)顯示,上位機(jī)回傳的分類結(jié)果控制繼電器的導(dǎo)通,實(shí)現(xiàn)泄壓專用的兩通電磁閥關(guān)閉,其他氣流支路的三通電磁閥常態(tài)導(dǎo)通,氣泵與執(zhí)行器之間的氣路導(dǎo)通,執(zhí)行器充氣彎曲,從而完成同樣的手部訓(xùn)練動(dòng)作;當(dāng)做出舒展動(dòng)作時(shí),泄壓電磁閥導(dǎo)通,兩位三通電磁閥切換,執(zhí)行器與泄壓電磁閥之間氣路導(dǎo)通,完成排氣泄壓,手指伸展,恢復(fù)到初始狀態(tài),完成鏡像康復(fù)訓(xùn)練。
氣動(dòng)系統(tǒng)流程如圖8所示。
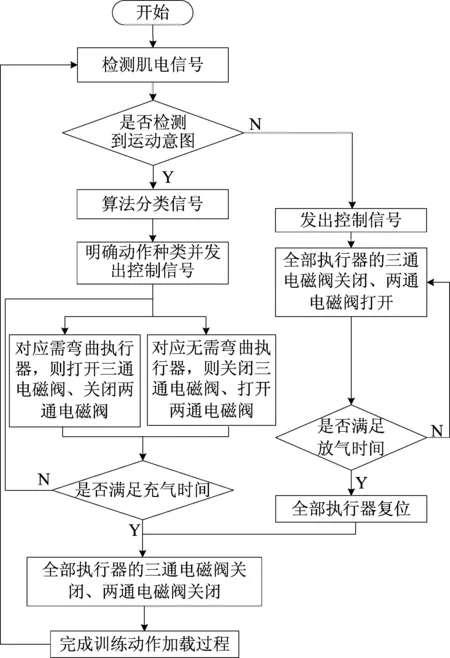
圖8 氣動(dòng)系統(tǒng)流程框圖
當(dāng)上個(gè)訓(xùn)練動(dòng)作結(jié)束需要執(zhí)行下個(gè)訓(xùn)練動(dòng)作時(shí),若需要彎曲執(zhí)行器,則三通電磁閥打開、兩通電磁閥關(guān)閉以實(shí)現(xiàn)充氣;若無需彎曲執(zhí)行器,則三通電磁閥關(guān)閉、兩通電磁閥打開以實(shí)現(xiàn)放氣,并判斷是否滿足充氣時(shí)間。當(dāng)滿足充氣時(shí)間則做出訓(xùn)練動(dòng)作,隨后將全部執(zhí)行器的三通電磁閥及兩通電磁閥均關(guān)閉,完成訓(xùn)練動(dòng)作加載過程;當(dāng)不滿足充氣時(shí)間,則重新執(zhí)行上述過程。當(dāng)上個(gè)訓(xùn)練動(dòng)作結(jié)束且無需執(zhí)行下個(gè)訓(xùn)練動(dòng)作時(shí),全部執(zhí)行器的三通電磁閥關(guān)閉、兩通電磁閥打開以實(shí)現(xiàn)放氣,并判斷是否滿足放氣時(shí)間,若滿足充氣時(shí)間則全部執(zhí)行器復(fù)位,否則重新執(zhí)行上述過程,隨后全部執(zhí)行器的三通和兩通電磁閥均關(guān)閉,完成訓(xùn)練動(dòng)作卸載過程。
在此循環(huán)系統(tǒng)中,肌電信號(hào)反應(yīng)速度快,不同手勢(shì)狀態(tài)能實(shí)時(shí)更新,及時(shí)實(shí)現(xiàn)不同手勢(shì)之間的自由切換。
3 康復(fù)訓(xùn)練手套集成與應(yīng)用
將單指執(zhí)行器單元一體化,由于手指長(zhǎng)度不同,利用可更換、尺寸可調(diào)整的連接部件將長(zhǎng)、短指節(jié)整合成完整的單指執(zhí)行器單元。
固定2個(gè)單指執(zhí)行器的短指節(jié),將2枚單指執(zhí)行器形成一個(gè)夾爪對(duì)物品進(jìn)行抓取,結(jié)果如圖9a所示。從圖9a可以看出,單指執(zhí)行器單元形成的夾爪具有很好的抓取效果。
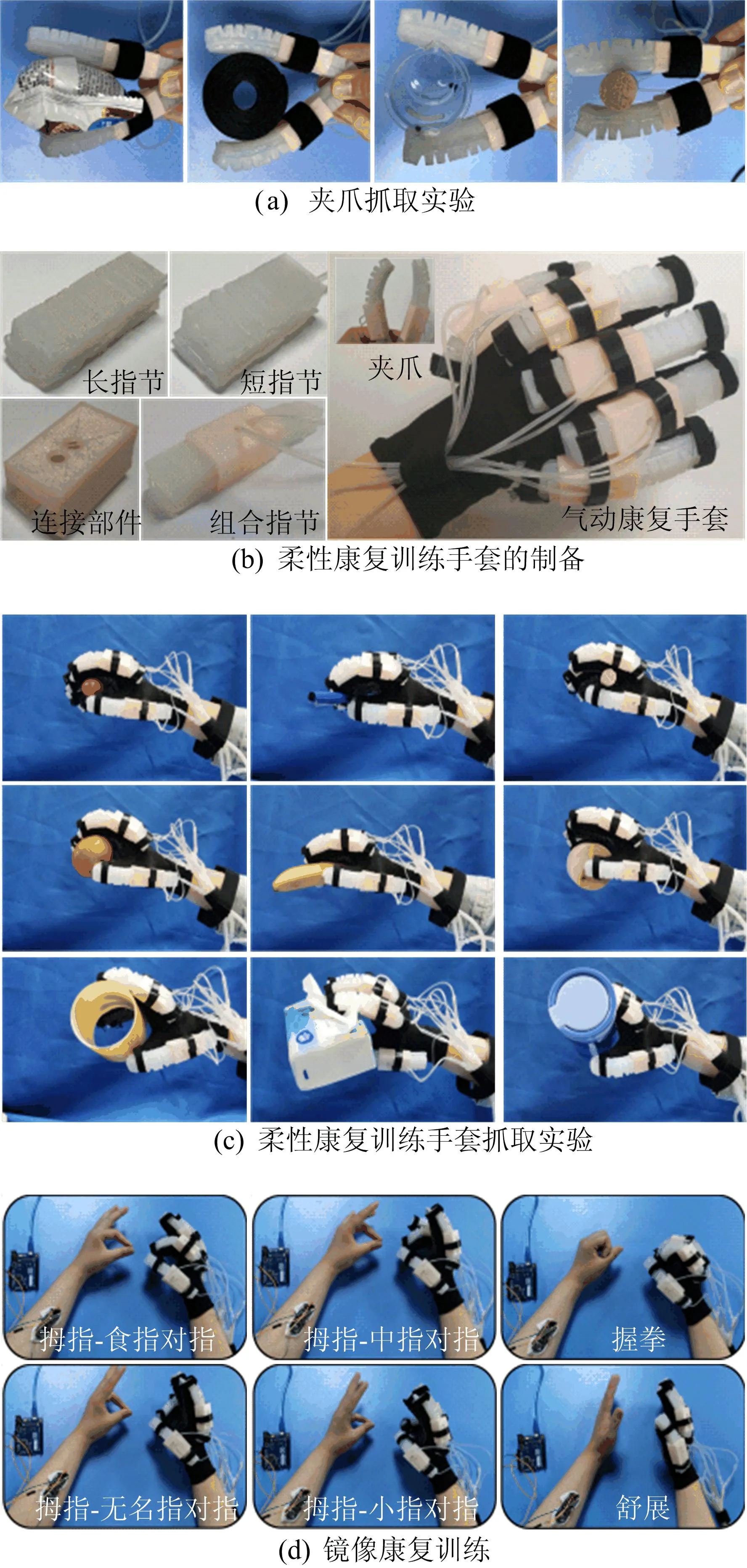
圖9 康復(fù)訓(xùn)練手套的集成和應(yīng)用
將魔術(shù)貼縫制在手套上,根據(jù)手的實(shí)際尺寸制作5個(gè)單指執(zhí)行器單元,借助魔術(shù)貼固定在織物手套上完成柔性康復(fù)訓(xùn)練手套的制備,如圖9b所示。
將需訓(xùn)練的手佩戴手套,借助肌電信號(hào)獲取另一只手的運(yùn)動(dòng)意圖,如圖9c所示。從圖9c可以看出,在康復(fù)訓(xùn)練手套的幫助下,該手成功抓取物體,表明制作的康復(fù)訓(xùn)練手套可以輔助抓取康復(fù)訓(xùn)練。
手的鏡像康復(fù)訓(xùn)練如圖9d所示。從圖9d可以看出,根據(jù)運(yùn)動(dòng)意圖,康復(fù)訓(xùn)練手套實(shí)現(xiàn)了5組手勢(shì)的鏡像康復(fù)訓(xùn)練,有效促進(jìn)大腦神經(jīng)元重塑[20],加速手部康復(fù)。
4 結(jié) 論
為了提高康復(fù)訓(xùn)練的舒適性和安全性,本文基于仿生原理,根據(jù)人體手部形狀,設(shè)計(jì)一種半定制柔性康復(fù)訓(xùn)練手套。通過數(shù)學(xué)建模和有限元仿真分析,得到合適的柔性執(zhí)行器結(jié)構(gòu)尺寸參數(shù);對(duì)柔性執(zhí)行器的長(zhǎng)、短指節(jié)分別進(jìn)行彎曲角度、驅(qū)動(dòng)力以及連接部件整合的單指執(zhí)行器單元彎曲測(cè)試發(fā)現(xiàn),單指執(zhí)行器單元滿足手指康復(fù)訓(xùn)練需求;將單指執(zhí)行器單元一體化后的康復(fù)訓(xùn)練手套借助SVM算法識(shí)別人手運(yùn)動(dòng)意圖,從而輔助完成鏡像康復(fù)訓(xùn)練。
在下一步的工作中,擬進(jìn)一步通過增加表面肌電信號(hào)采集通道數(shù)和優(yōu)化特征提取算法的方式實(shí)現(xiàn)精確手勢(shì)識(shí)別,提高手勢(shì)識(shí)別的準(zhǔn)確率。
 合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)2024年3期
合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)2024年3期
- 合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)的其它文章
- 《合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版)》專欄征稿啟事
- 基于USB PD 3.0協(xié)議的新型雙相標(biāo)記解碼電路設(shè)計(jì)與驗(yàn)證
- 基于TCR模型的臺(tái)風(fēng)極值降雨強(qiáng)度預(yù)測(cè)
- 基于改進(jìn)GM(1,1)模型的生活用水量預(yù)測(cè)
- 豎向地震作用下層間隔震結(jié)構(gòu)的動(dòng)力反應(yīng)研究
- 利用GRACE衛(wèi)星分析安徽省地下水儲(chǔ)量的時(shí)空變化