一種仿人手軟體康復機器人結構設計與實驗
2024-03-31 05:33:12鄧華送董若楠曹大迪
合肥工業大學學報(自然科學版) 2024年3期
鄧華送, 張 彥, 董若楠, 陳 品, 曹大迪, 王 勇
(1.合肥工業大學 機械工程學院,安徽 合肥 230009; 2.合肥工業大學 智能互聯系統安徽省實驗室,安徽 合肥 230009; 3.帝國理工學院 生物工程系,英國 倫敦 SW7 2AZ)
隨著經濟快速發展,人口老齡化趨勢日益明顯,老年人年齡增長的同時人體機能在逐漸衰弱;此外,建筑工地傷殘事故、交通事故以及重大疾病等也易使人的身體機能受到損傷。手部作為使用頻率極高的器官之一,其機能衰弱或受損將嚴重影響個人的生活質量,因此在手部功能受損時要及時治療并進行康復訓練。康復是一個長斯的過程,傳統的康復訓練主要以人工方式為主,較依賴于康復師的能力,但現階段康復訓練主要由醫院康復醫學科以及社區康復中心提供康復訓練治療,不僅康復資源有限,高昂的人工康復訓練費用還給家庭及社會帶來嚴重負擔[1]。
當前,針對手部功能康復[2]的研究已成為康復工程醫學以及機器人學科的一個熱點,軟體機器人相關研究的深度和廣度得到快速拓展。文獻[3]提出一種變剛度的、具有氣動網格和纖維增強型2種結構的軟體制動器;文獻[4]提出一種由纖維增強致動器組成的軟體制動器,還通過安裝彎曲傳感器實現抓取力量的PID控制;文獻[5]通過拓撲優化建立多材料設計的數學模型,提出一種由軟體材料和剛性材料組合成能夠承受超過自身質量的負載軟體機器人;文獻[6]提出一種采用氣動網絡結構實現復雜運動并具備可編程設計的扭轉軟體機器人。
結合國內外關于手部康復軟體機器人的研究可以發現,大多數的研究成果還停留在實驗室階段,雖然整體結構設計、智能化程度較高,但是離實際應用還有些差距,主要存在以下問題。
1) 與人手適配性差。人手指的彎曲主要在手指關節處,而現有的致動器彎曲形態多為整體半圓形,因此與人手的實際彎曲情況存在差距,部分致動器存在容易扭曲的問題,驅動能力較差。
2) 力學性能有待提高。手部功能障礙患者通常在初期存在手部僵硬的情況,因此要求軟體致動器具有較大的輸出力,以達到手部康復效果。
3) 制作工藝復雜、價格昂貴。目前研究人員制作軟體致動器的主要工藝有二次脫模和3D打印技術:二次脫模需要將2個模型再次黏結,良品率較低;3D打印則難以應用到大批量生產中。部分投入市場的手部康復設備價格昂貴,大規模推廣存在困難。
4) 便攜性差,康復訓練模式單一。部分裝置采用固定設備提供氣源,限制了裝置的便攜性,且提供的訓練方法通常只有被動訓練,模式單一。
鑒于以上問題,本文基于軟體致動器的特點以及對手部功能康復訓練的需求,提出一種偏心波紋管軟體致動器結構以提高對手指的驅動能力,且與人手具有較高的貼合性;研制出一款具有鏡像療法功能[7]的手部康復軟體機器人。通過手部康復軟體制動器的制作和實驗平臺的搭建對仿真模型進行驗證,旨在結合不同的康復訓練模式提高訓練的效率。
1 軟體致動器的設計
1.1 手部分析
人手的手指部分由肌肉、骨頭和14個骨關節組成,可以近似簡化成擁有20個自由度。人手的骨關節示意圖[8]如圖1所示。圖1中:DIP為遠端指間關節;PIP為近端指間關節;MCP為掌指關節;IP為拇指指間關節;MP為拇指掌指關節;CM為腕掌關節。為了便于康復裝置的設計,對手部運動模型進行簡化,所有關節只考慮前后彎曲的自由度,骨骼為剛體連桿結構,簡化后的手部運動模型如圖2所示。

圖1 人手骨關節示意圖
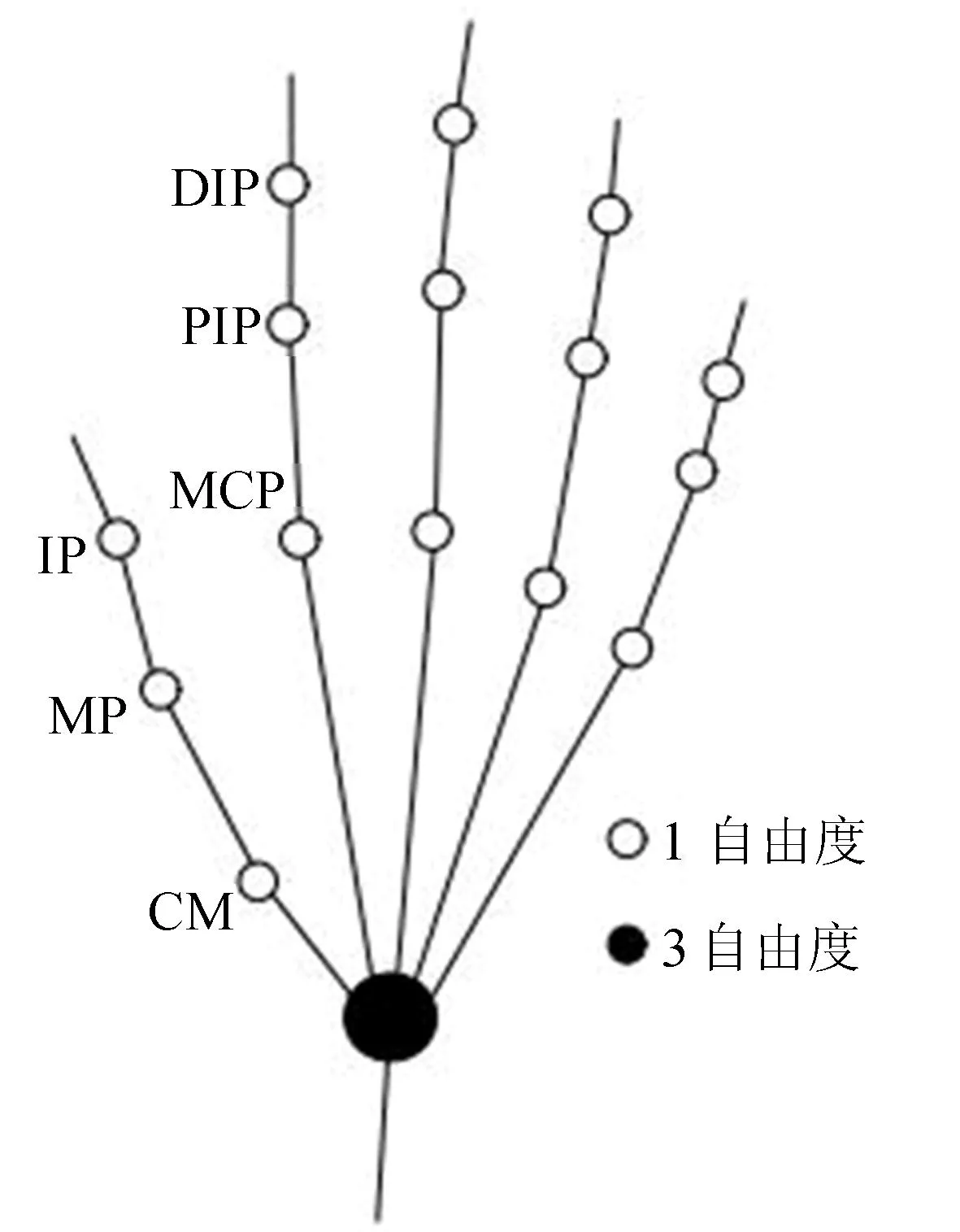
圖2 人手簡化運動模型
人手常用的33種運動模式[8]如圖3所示。

圖3 人手常用的33種運動模式
設計軟體制動器之前需要了解人手手指各關節活動的范圍和手指指骨的長度,通過查閱文獻[9-10]可以獲取相關數據,結果見表1、表2所列。
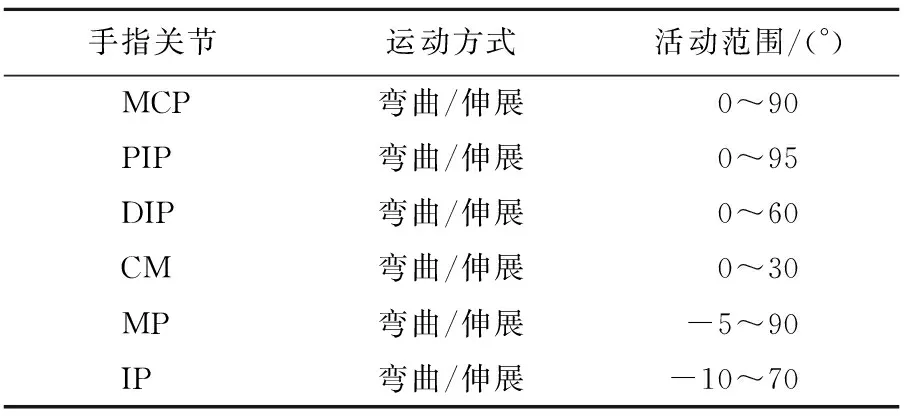
表1 人手手指各關節活動范圍

表2 人手手指各指骨長度 單位:mm
1.2 軟體制動器結構設計
1.2.1 工作原理
目前手部康復軟體設備多數采用圓形波紋管結構,其主要特點是制作簡單,輸出力大,整體為中心對稱結構。但是在不受約束時該結構波紋管只具有伸長變形,自身不會產生彎曲變形,且周向波高相等導致在氣壓驅動變形時伸長率一致,需要依靠兩端的固定支架使其產生彎曲變形,與人手彎曲適配性較低,存在一定的能量損耗,圓形波紋管彎曲變形示意圖如圖4所示。
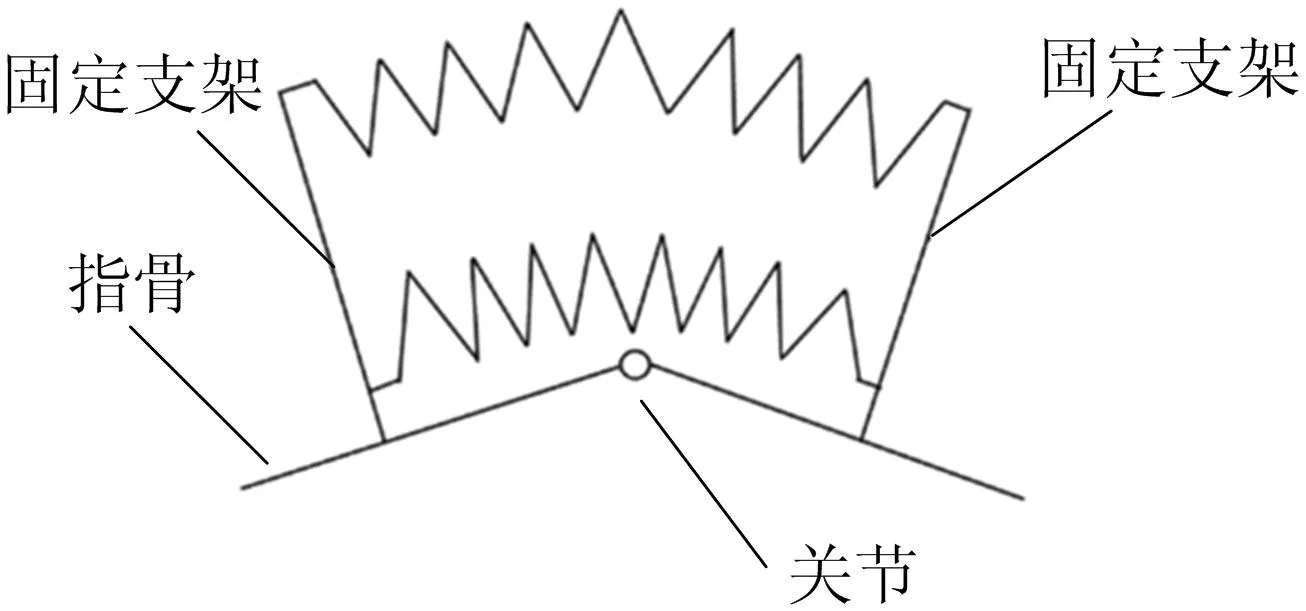
圖4 圓形波紋管彎曲變形示意圖
為使得波紋管結構致動器在彎曲過程中變形協調以及保證軟體致動器自身具有彎曲性能,減小變形過程中的能量損耗和徑向膨脹變形,本文提出一種偏心波紋管結構軟體致動器,以提高圓形波紋管致動器的彎曲性能和對手指的驅動能力。偏心波紋管結構軟體致動器的波峰、波谷中心存在一定的偏心距,為減少致動器的徑向變形,波峰、波谷的橫截面形狀選為橢圓,波峰、波谷橢圓的長軸位于軟體致動器左、右對稱面上,且兩橢圓的中心存在一定的偏心距。
偏心波紋管致動器結構如圖5所示。其中:O1、A1A4、B1B4分別為波峰橢圓的中心、長軸、短軸;O2、A2A3、C1C2分別為波谷橢圓的中心、長軸、短軸;L為致動器的總長;t為波距;s為壁厚。軟體致動器兩側的波高|B1B2|、|B3B4|相等,由于偏心距|O1O2|的存在,使左、右對稱面位置的上波高|A1A2|大于下波高|A3A4|,偏心波紋管軟體致動器充入氣體后上、下伸長率不同,致動器將產生彎曲變形。偏心距為0和大于0的2款橢圓形波紋管軟體致動器在0.06 MPa正壓驅動下的變形仿真結果如圖6所示,可以看出當偏心距大于0時軟體致動器明顯彎曲變形,通過有限元仿真分析可得偏心距為0.6 mm。
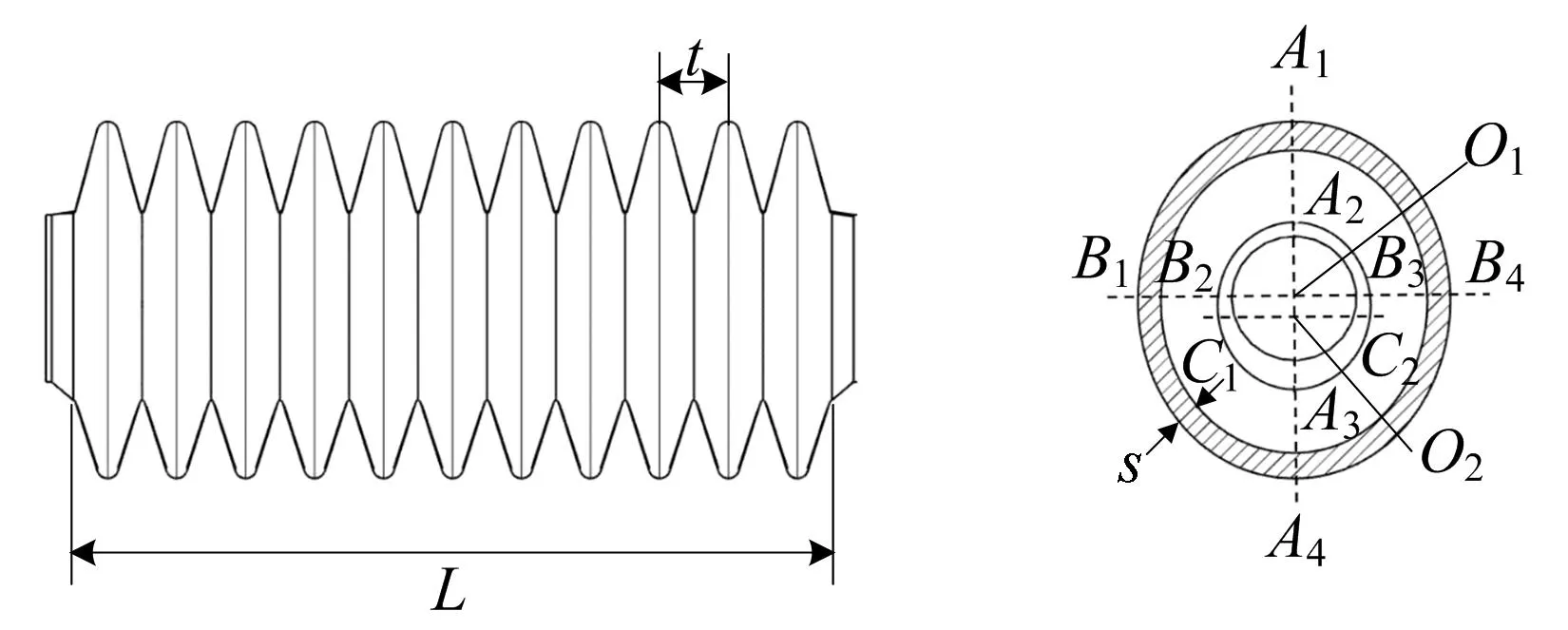
圖5 偏心波紋管致動器結構

圖6 偏心波紋管軟體致動器充氣狀態
1.2.2 參數及材料確認
考慮本研究設計的手部功能康復訓練裝置的使用對象,通過查閱人手相關統計數據[11]可知,成年人的手指關節直徑通常為18~22 mm。為了使相鄰手指背部的軟體致動器不發生干涉并且減少軟體致動器在正壓驅動下的徑向變形,將軟體致動器波峰橢圓的長軸、短軸長度分別設計為16.5、14.5 mm;波谷橢圓的尺寸直接影響軟體致動器周向的波高大小,參考文獻[5]設計的軟體致動器波高尺寸,本研究將波谷橢圓的長軸、短軸長度分別設計為8.8、8.1 mm;軟體致動器整體長度L參考表2人手手指各指骨長度,并且考慮軟體致動器在正壓驅動手指彎曲時需要一定的伸長量提供輸出力,因此將軟體致動器的自然長度取為人手指指骨最長長度的1.5倍,約為44.0 mm。最終確定的軟體致動器結構部分參數見表3所列。
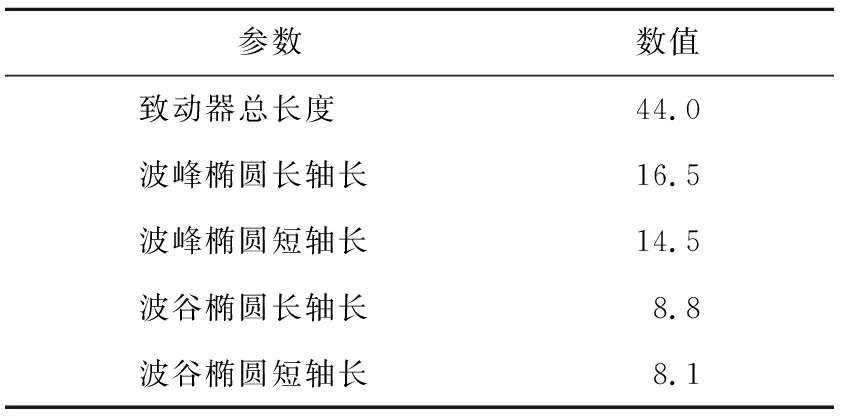
表3 偏心波紋管軟體致動器結構參數 單位:mm
1.3 軟體制動器的制造
本研究采用的軟體致動器制作方法為目前工業生產中十分成熟的中空吹塑工藝,其主要原理如圖7所示。
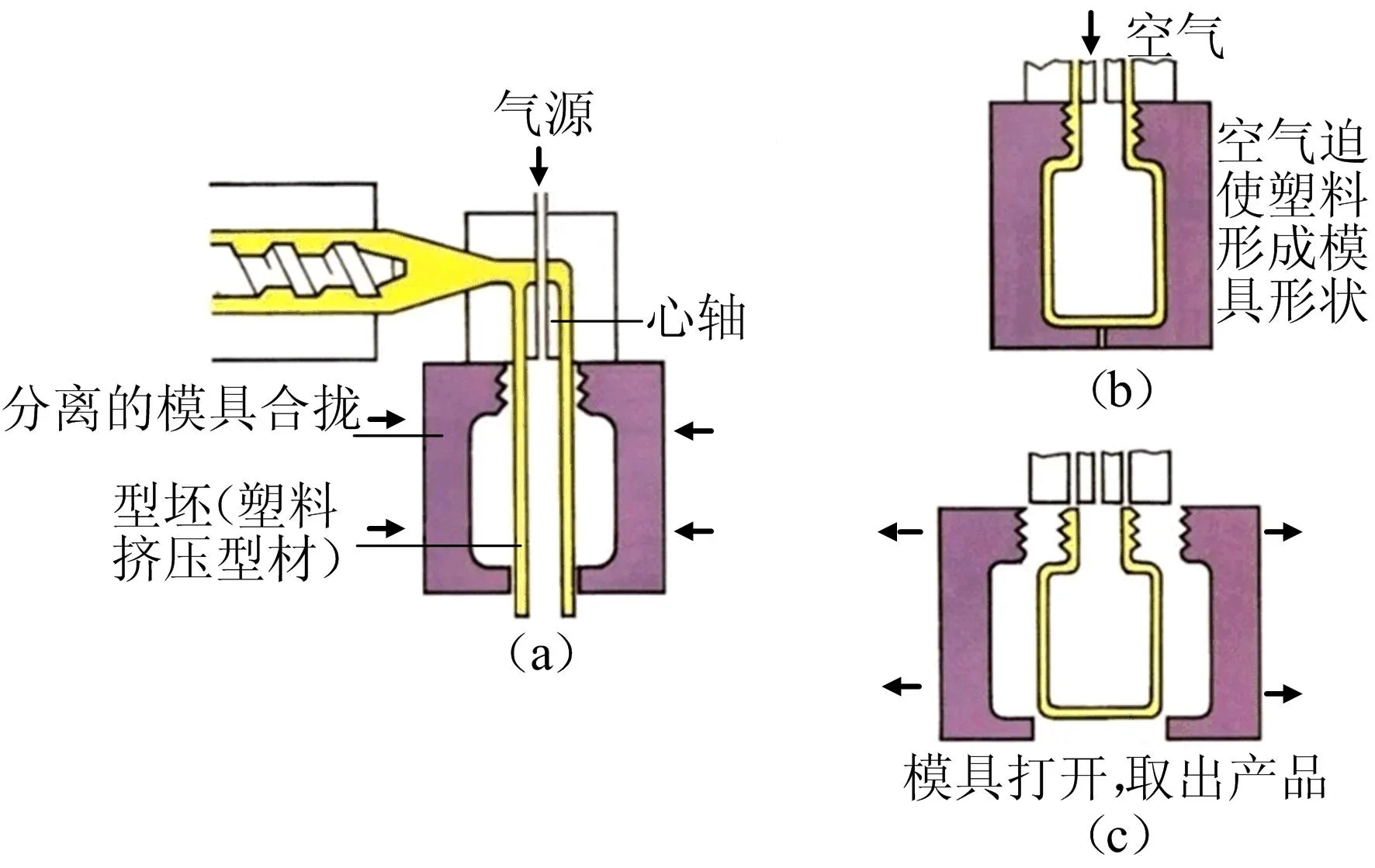
圖7 中空吹塑工藝原理
按照優化后得到的數據繪制偏心波紋管軟體致動器整體三維模型,如圖8a所示;根據該三維模型,通過數控加工得到相應的中空吹塑模具,如圖8b所示;最終加工出的偏心波紋管軟體致動器實物如圖8c所示。
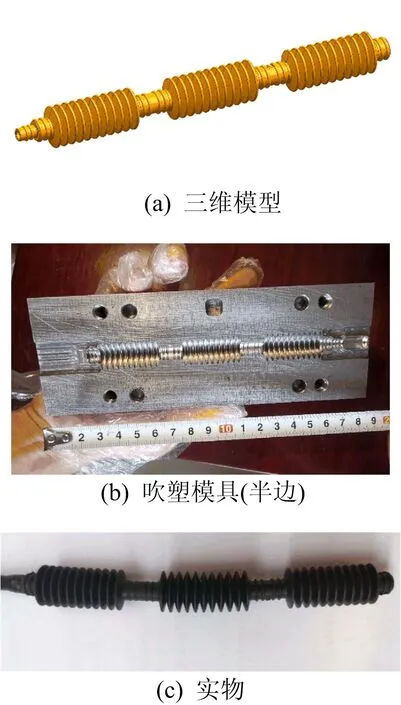
圖8 偏心波紋管軟體致動器三維模型、吹塑模具及實物圖
2 手部康復軟體機器人的設計
2.1 控制系統設計
軟體機器人控制系統設計框圖如圖9所示(其中SPI為全雙工同步串行總線,是微處理控制單元MCU與外圍設備之間進行通信的同步串行端口)。彎曲傳感器能夠檢測患者手指的彎曲程度,其中與主機連接的5個彎曲傳感器分別位于患者患側5個手指的背部,與數據手套連接的5個彎曲傳感器則分別位于患者健側5個手指的背部。數據手套將患者健側手指的彎曲情況通過WIFI模塊傳送至主機,主機將接收到的健側手指彎曲數據與采集到的患側手指彎曲數據進行對比,控制電磁閥對軟體致動器的充氣和吸氣氣路進行切換,從而調整手指的彎曲程度,當2組數據在誤差范圍內達到一致時,關閉軟體致動器的充氣及吸氣氣路進行保壓,從而實現對手指彎曲程度的控制。
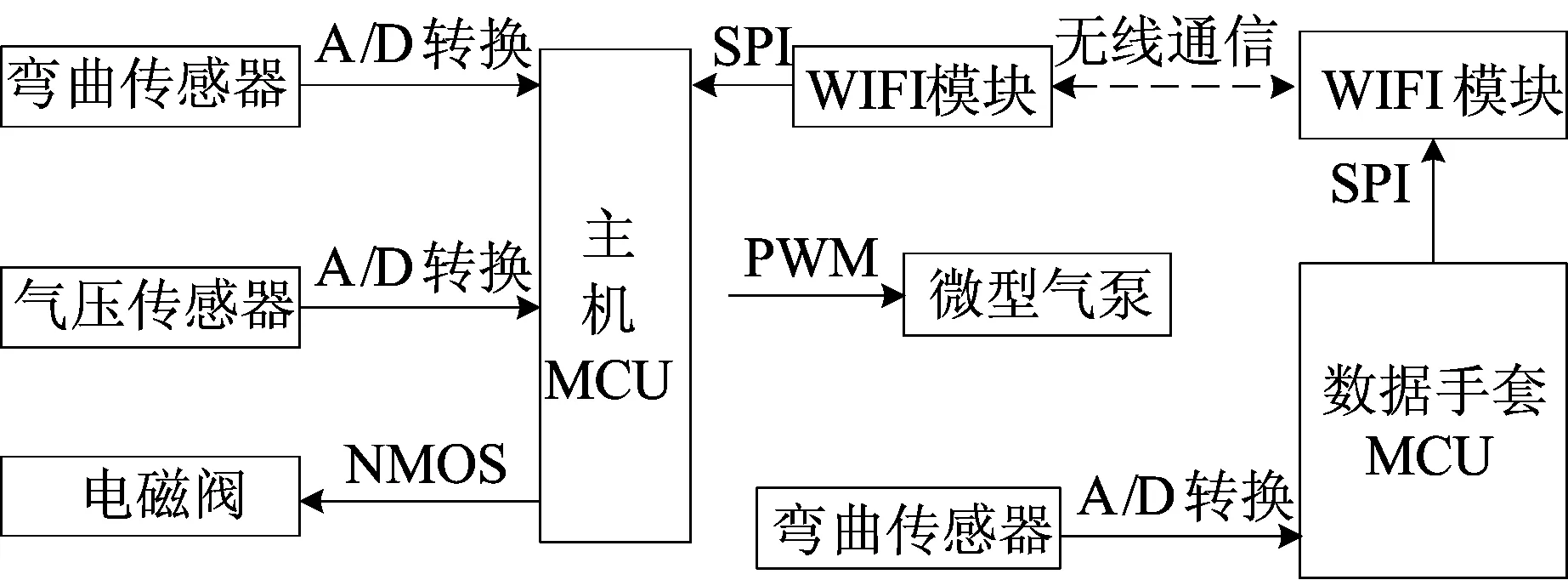
圖9 軟體機器人控制系統整體設計框圖
2.2 手部康復軟體機器人裝置
首先完成康復手套和數據手套的組裝。制作好的康復手套如圖10a所示,其質量為180 g,數據手套如圖10b所示,其質量僅為82 g。
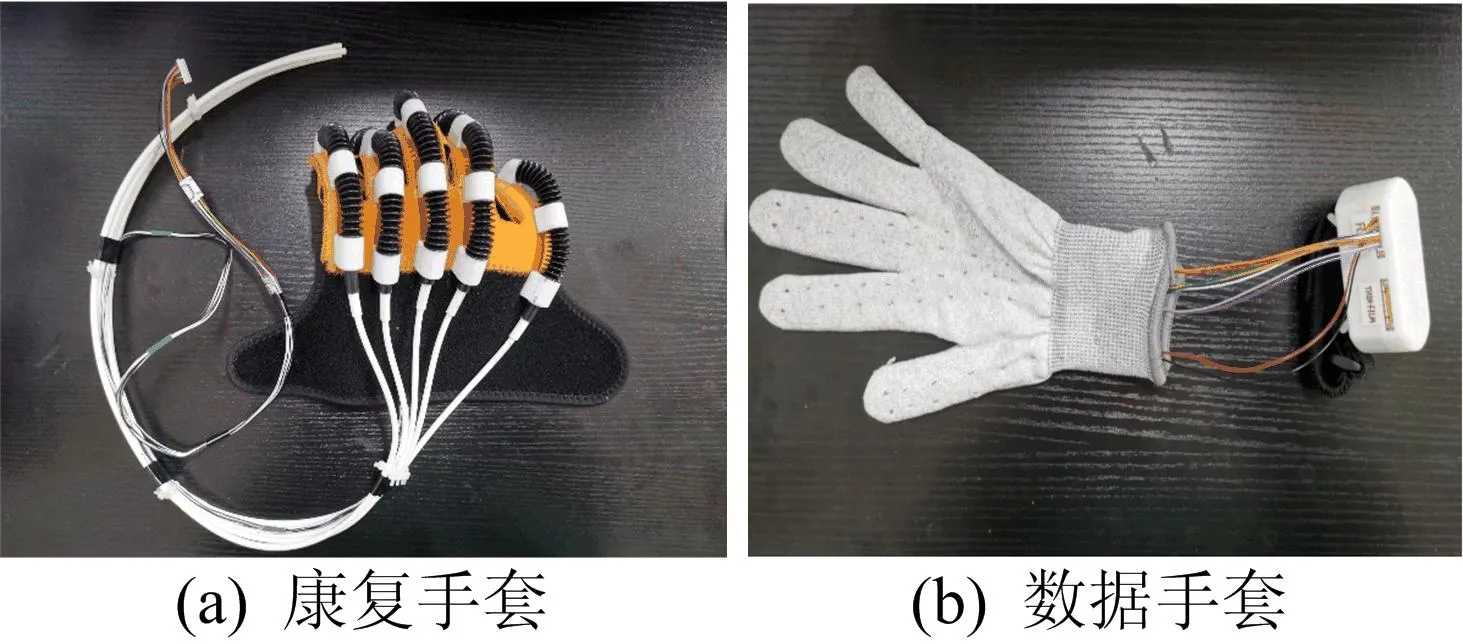
圖10 康復手套和數據手套
手部康復軟體機器人裝置在自然狀態下的整體實物圖如圖11所示。
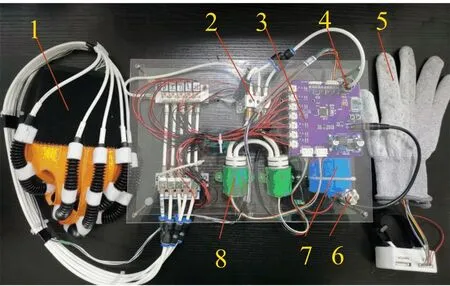
1.康復手套 2.微型電磁閥 3.主機電路板 4.氣壓傳感器
手部康復軟體機器人包含康復手套、主機、數據手套以及軟件,調試好的軟件程序已經通過SWD下載線寫入主機電路板芯片中。該機器人裝置采用雙泵串聯提供氣源,能夠輸出最大正壓140 kPa,最大負壓-80 kPa,裝置總質量約2.4 kg,整體尺寸為300 mm×200 mm×50 mm,實測使用時間2 h左右,因此該裝置具有較好的便攜性和續航能力,可以在家庭、醫院以及康復中心等場合用于手部功能障礙患者的康復訓練。患者使用時首先將康復手套佩戴在患側手部,將數據手套佩戴在健側手部,然后依次打開主機以及數據手套的電源,通過主機上的按鍵切換訓練模式為鏡像康復訓練模式或非鏡像康復訓練模式,即可開始進行輔助康復訓練。
3 實 驗
3.1 致動器實驗
3.1.1 氣壓彎曲角度實驗
通過電氣比例閥調節軟體致動器的驅動氣壓從0 kPa緩慢增加至60 kPa,通過固定相機拍照記錄軟體致動器不同氣壓下的彎曲變形。測得軟體致動器不同驅動氣壓時的彎曲角度數據,并將實驗數據連同有限元仿真數據繪制成點線圖,如圖12所示。

圖12 氣壓彎曲變形仿真與實驗結果對比
從圖12可以看出:在驅動氣壓從0 kPa升至20 kPa時,偏心波紋管軟體致動器的彎曲角度增加較快;當氣壓升至20 kPa以上時,致動器彎曲角度的增加相對比較緩慢;氣壓為60 kPa時,實驗測得的軟體致動器彎曲角度為56°。這表明該軟體致動器具有較好的彎曲能力,同時實驗數據與有限元仿真數據的平均偏差僅為4.41°,驗證了有限元仿真的準確性。
3.1.2 氣壓輸出力實驗
正壓-輸出力的實驗結果如圖13a所示。從圖13a可以看出,軟體致動器對鉸鏈端部施加的輸出力大小隨氣壓增大而增大,且輸出力大小與氣壓近似為線性關系,當驅動軟體致動器的氣壓為140 kPa時,輸出力為4.456 6 N。

圖13 正壓-輸出力、負壓-輸出力實驗結果
負壓-輸出力的實驗結果如圖13b所示。從圖13b可以看出,軟體致動器對鉸鏈端部施加的輸出力大小隨負壓增大而增大,方向與正壓時的輸出力方向相反,輸出力大小同樣與氣壓近似為線性關系。
負壓-輸出力的曲線斜率比正壓-輸出力曲線的斜率略大,出現這一現象的原因為在負壓作用下,波紋管負壓收縮時沒有產生徑向方向變形,其驅動力主要表現在軸向方向上;而正壓作用時,由于徑向膨脹使得波紋管的軸向方向上的力有所減小。當驅動軟體致動器的氣壓為-80 kPa時,輸出力為-2.806 3 N。
3.2 指尖輸出力實驗
指尖輸出力實驗如圖14所示。

圖14 指尖輸出力實驗
將薄膜壓力傳感器粘貼在受試者手指指尖的背部中心,測量偏心波紋管對佩戴者手部的主要壓力,見圖14a。受試者正確穿戴好康復手套,整個實驗過程中受試者手部保持完全放松狀態,實驗包括初始階段、充氣階段、保壓階段和排氣階段,見圖14b。
為了驗證該裝置提供的指尖力是否滿足抓握需求,充氣階段主機控制氣泵對軟體致動器持續加壓至最大輸出正壓140 kPa,保壓階段采集薄膜壓力傳感器的輸出電壓,以獲取實驗過程中軟體機器人康復手套的各指尖輸出力。各手指指尖輸出力曲線如圖15所示;各手指保壓階段指尖輸出力統計分析見表4所列。
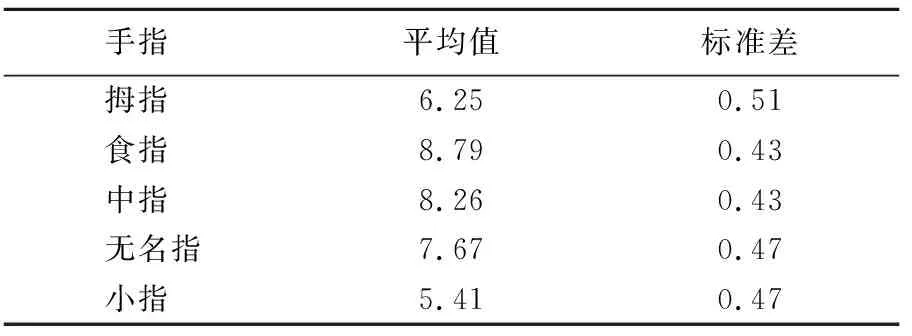
表4 各手指保壓階段指尖輸出力統計分析 單位:N
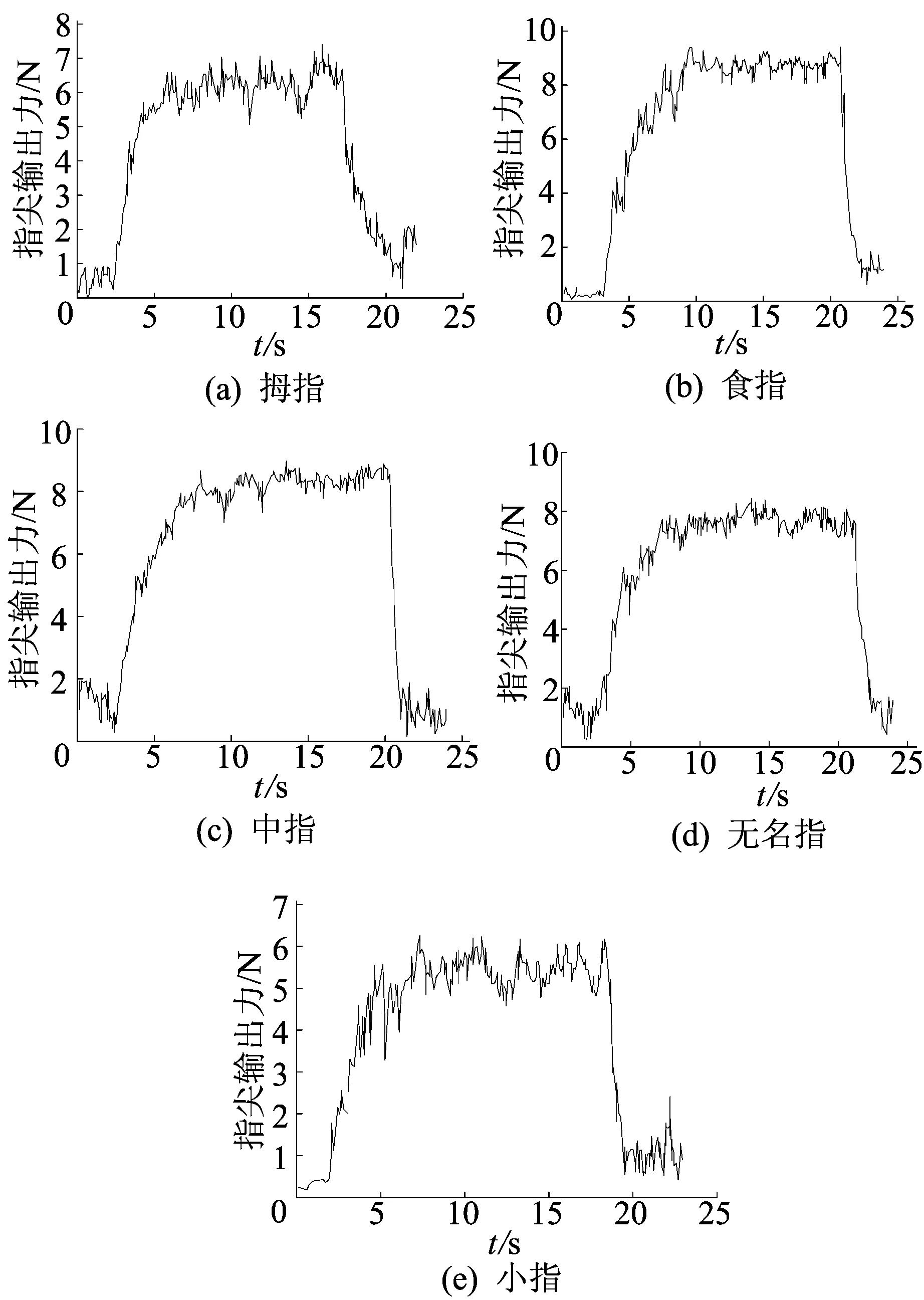
圖15 各手指指尖輸出力曲線
從圖15可以看出,食指、中指和無名指的指尖輸出力曲線較為相似。在保壓階段,食指、中指和無名指的指尖輸出力平均值分別為8.79、8.26、7.67 N,拇指和小指的指尖輸出力平均值分別為6.25、5.41 N。日常生活中通常只需5 N左右的力即可滿足抓握物體的基本需求[12],實驗結果表明本研究設計的軟體機器人能夠輔助使用者抓握常見物體;在保壓階段各手指的指尖輸出力波動較小,其標準差最大值僅為0.51 N,表明該軟體機器人系統輸出力的穩定性良好。
3.3 手部康復軟體機器人系統實驗
被動康復訓練模式實驗如圖16所示。受試者正確佩戴好軟體機器人康復手套,實驗過程中規定受試者手部始終處于放松的狀態,完全依靠康復手套驅動受試者的手部進行運動,實驗內容主要包括伸掌和握拳動作。

圖16 被動康復訓練模式實驗
從圖16可以看出,在被動康復訓練模式下,康復手套能夠在主機的控制下輔助受試者手部進行被動握拳、伸掌訓練。
鏡像康復訓練模式實驗中,受試者右手、左手分別模擬患者健側、患側手部。
首先,進行不同彎曲角度控制實驗。受試者僅右手佩戴數據手套,調整好彎曲傳感器位置與各手指背部對應,通過彎曲傳感器測得右手緩慢握拳時的彎曲角度,主機根據獲得的右手彎曲角度數據控制康復手套實現相同彎曲角度,實驗結果如圖17a所示;同時佩戴康復手套和數據手套,佩戴康復手套的左手保持完全放松狀態,右手通過數據手套輔助左手彎曲相同角度,進行輔助康復訓練,實驗結果如圖17b所示。
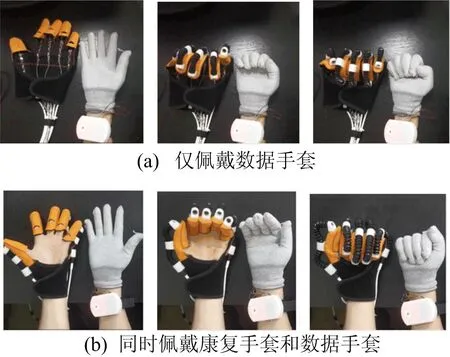
圖17 鏡像康復訓練模式下不同彎曲角度控制實驗
然后,進行分指控制實驗。受試者首先僅右手佩戴數據手套并做出日常手勢動作,觀察康復手套能否復現右手動作,實驗結果如圖18a所示;受試者同時佩戴康復手套和數據手套,通過佩戴數據手套的右手控制康復手套進行輔助康復訓練,實驗過程中受試者左手同樣始終保持放松狀態,完全依靠康復手套的驅動力進行手部運動,實驗內容包括日常各種手勢動作,觀察康復手套能否輔助受試者左手復現右手動作,實驗結果如圖18b所示。
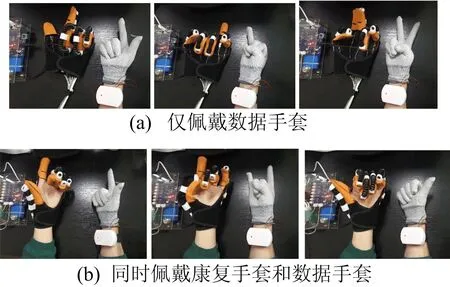
圖18 鏡像康復訓練模式下分指控制實驗
圖17、圖18表明,在鏡像康復訓練模式下,康復手套能夠輔助受試者左手復現佩戴數據手套的右手做出的不同彎曲角度和各種手勢動作,能夠進行鏡像康復訓練;其中分指控制實驗驗證了本研究設計的單氣源分指控制氣動系統的可行性。系統實驗結果表明,本研究裝置達到設計要求,基本能夠滿足手部功能障礙患者的康復訓練需求。
4 結 論
基于軟體制動器的特點以及手部功能康復訓練的需求,本文提出一種偏心波紋管軟體致動器結構,設計其波峰、波谷中心存在一定的偏心距,使得致動器在正壓驅動時由于上、下伸長率不同產生彎曲變形,減少制動器變形過程中能量消耗,提高對手指的驅動能力;通過實驗確定在制作工藝范圍內的最優結構參數,并完成軟體致動器的制作。氣壓-彎曲角度和氣壓-輸出力實驗結果表明,該軟體致動器具有較好的彎曲能力和驅動能力;指尖輸出力實驗結果表明,各手指力均不小于5 N。抓取實驗以及鏡像訓練實驗表明,本研究設計的手部康復機器人具有較好的穩定性和順應性,能夠輔助受試者患側手部復現健側手部動作,實現不同彎曲角度控制以及分指控制功能,基本能夠滿足手部功能障礙患者的康復訓練需求。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
特別健康(2018年2期)2018-06-29 06:13:44
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14