基于毫米波雷達的非視距目標(biāo)探測和定位方法研究
2024-04-02 08:32:38蔣留兵
雷達科學(xué)與技術(shù) 2024年1期
蔣留兵,張 澤,車 俐
(1.桂林電子科技大學(xué),廣西桂林 541004;2.廣西無線寬帶通信與信號處理重點實驗室,廣西桂林 541004)
0 引 言
近年來,隨著城市化進程的發(fā)展,傳統(tǒng)窺視鏡探測受工作機理的制約無法對建筑遮蔽目標(biāo)進行探測,由于雷達頻段的電磁波具有豐富的透射、衍射、反射等傳播特性,利用雷達探測城市環(huán)境目標(biāo)在反恐維穩(wěn)、災(zāi)害救援、智能交通等領(lǐng)域占據(jù)重要地位。由于目標(biāo)通常隱匿在城市建筑中,為了保證我方人員的安全,迫切需要得到遮蔽目標(biāo)的位置信息,而電磁波不能通過直視路徑來探測遮蔽目標(biāo),對此基于非視距的路徑探測方式得到了國內(nèi)外的關(guān)注。對于非視距(NLOS)目標(biāo)的檢測主要集中在多徑利用和穿墻檢測這兩種典型方法。穿墻雷達是利用低頻電磁波檢測目標(biāo),而多徑探測則可以工作在所有頻帶。因此,大量學(xué)者開始關(guān)注多徑探測技術(shù)。
對非視距目標(biāo)進行探測最早由DARPA 發(fā)起[1]。之后相關(guān)學(xué)者陸續(xù)驗證了多徑信號對非視距目標(biāo)探測的可行性[2-3]。文獻[4-5]主要針對的是單建筑拐角遮蔽目標(biāo)定位。文獻[6]提出多通道掃描雷達系統(tǒng)并基于多通道相位比較算法對墻后目標(biāo)的位置進行定位。文獻[7-8]提出基于匹配子空間濾波法和射線跟蹤法對非視距目標(biāo)進行探測,但兩個算法計算量很大。文獻[9]提出利用合成雙基地雷達基于到達時間的定位方法。文獻[10]與[11]分析了拐角多徑傳輸模型,并基于到達時間與相應(yīng)路徑進行匹配,最后通過橢圓交叉定位對目標(biāo)進行定位,但會發(fā)生多徑缺失并相應(yīng)產(chǎn)生多徑鬼影問題。此外,文獻[12]利用雷達成像算法消除多徑鬼影對目標(biāo)進行定位。文獻[13]提出網(wǎng)格匹配的非視距定位方法,需要計算每個網(wǎng)格的到達時間。上述算法多用于提供衍射和高階反射路徑的低頻雷達,然而毫米波雷達對于衍射和高階反射幾乎不存在。由于毫米波雷達的便攜性以及高距離分辨率,研究毫米波雷達的非視距目標(biāo)定位算法具有重要意義。
本文首先對L 型建筑下雷達位置和非視距可探測區(qū)域間的關(guān)系進行分析;之后針對由不同反射面構(gòu)成的共同可探測區(qū)域,設(shè)計多路徑聯(lián)合檢測器將多條路徑的信息聯(lián)合使用;最后通過實驗驗證本文所提算法的可行性。
1 非視距可探測區(qū)域
本文所考慮的場景是城市巷戰(zhàn)及室內(nèi)反恐環(huán)境中的典型場景——L 形拐角;本節(jié)將對該場景建立毫米波雷達多徑傳播模型,并探究雷達位置對可探測區(qū)域的影響,提供了雷達布設(shè)方案。
1.1 模型構(gòu)造
L 形走廊的平面二維幾何結(jié)構(gòu)如圖1 所示,梯形ABCD構(gòu)成的陰影部分表示NLOS 待探測區(qū)域。基于該場景建立直角坐標(biāo)系,其中x軸與Wall-3平行,雷達R所在位置為坐標(biāo)原點。Wall-2 與Wall-4之間的走廊寬度為L1,Wall-1與Wall-3之間的走廊寬度為L2。拐角點為C,VR1與VT1分別表示由Wall-1產(chǎn)生的鏡像虛擬雷達及鏡像虛擬目標(biāo),VT2表示由Wall-2 產(chǎn)生的鏡像虛擬目標(biāo)。非視距目標(biāo)T,通過Wall-1 和Wall-2 反射產(chǎn)生的路徑分別記為Path 1與Path 2。
圖1 L形拐角多徑傳播模型
考慮的多徑信號是由鏡面反射產(chǎn)生的信號,即墻面較光滑。對于毫米波雷達而言,通過閱讀大量的文獻得出二階及二階以上的多徑信號衰減嚴(yán)重,本文主要考慮的是一階多徑信號,通過將雷達放置不同位置來對NLOS可探測區(qū)域進行研究。
1.2 雷達位置對可探測區(qū)域的影響
通常情況下,對非視距區(qū)域進行探測時,應(yīng)該盡可能地保證較大的探測區(qū)域,這樣能提高對目標(biāo)的有效探測。然而,非視距可探測區(qū)域主要由雷達位置決定。實際應(yīng)用中,對雷達進行布設(shè),使得待探測目標(biāo)位于可探測區(qū)域內(nèi)具有重要的研究價值。
如圖1 所示,假設(shè)雷達R與拐角的連線與x軸負(fù)半軸之間的夾角為θ,R與C之間距離為d,則拐角C的位置為(dcosθ,dsinθ),反射面Wall-1 所在位置的y坐標(biāo)為(dsinθ-L2),反射面Wall-2 所在位置的x坐標(biāo)為(dcosθ+L1)。圖中B表示W(wǎng)all-2上的臨界反射點,A表示通過Wall-1產(chǎn)生的臨界多徑信號與Wall-2 的交點,F(xiàn)表示BE與AC的交點,延長Wall-3交Wall-2于點H。
在走廊寬度足夠長的情況下,基于鏡面反射原理,當(dāng)雷達位于(θ,d)處時:
通過Wall-2 一次反射多徑信號產(chǎn)生的可探測區(qū)域△BCE的面積為
通過Wall-1 一次反射多徑信號產(chǎn)生的可探測區(qū)域△ABC的面積為
通過Wall-1 和Wall-2 一次反射多徑信號產(chǎn)生的共同可探測區(qū)域△BCF的面積為
通常,雷達的布設(shè)應(yīng)該使可探測區(qū)域的非視距區(qū)域最大,即S多邊形ABCEF最大,有
式中,
現(xiàn)有對L形拐角非視距探測的研究,僅基于圖1 中Wall-2 產(chǎn)生的多徑信號進行目標(biāo)檢測定位的研究,其可探測區(qū)域僅為△BCE表示的陰影區(qū)域,其區(qū)域有限,實際探測價值較小。本文采用寬波束毫米波雷達的方法,讓雷達發(fā)射信號能同時照射到Wall-1與Wall-2,將大大增加可探測區(qū)域。為了探究雷達位置及引入Wall-1 多徑信號對可探測區(qū)域的影響,選取走廊寬度L1= 1.94 m,L2= 2.6 m,θ由10°~60°移動,每次移動2.5°,d在0.5~2 m 之間移動,每次移動0.1 m,通過仿真,得到雷達布設(shè)在不同位置時的可探測區(qū)域面積如圖2所示。
圖2 雷達位于不同位置時的可探測區(qū)域面積圖
由圖2(a)可知,對于常規(guī)的L 形走廊,若僅通過Wall-2 的反射產(chǎn)生的多徑信號探測,通過移動雷達位置,其最大可探測區(qū)域約為6.2 m2;若引入Wall-1產(chǎn)生的反射多徑信號,其最大可探測面積為33 m2,通過Wall-1 和Wall-2 的反射多徑信號產(chǎn)生的共同可探測區(qū)域面積為5 m2。移動雷達位置,利用Wall-1 產(chǎn)生的反射多徑信號進行探測,將大大提高可探測區(qū)域面積。此外,由圖2 可知,在相同角度θ下,縮小雷達R與拐角C之間的距離d,將有利于提高可探測區(qū)域的面積;在雷達R與拐角C之間的距離d一定時,總的可探測區(qū)域隨著角度θ的增大而增大。
綜上所述,利用雷達進行L 形場景非視距目標(biāo)探測時,對雷達的布設(shè)應(yīng)該遵從以下規(guī)則:在保證目標(biāo)在雷達非視距的前提下,將雷達與拐角的距離盡可能縮小,雷達與墻面的夾角盡可能增大。
2 多路徑聯(lián)合檢測器
由上節(jié)可知,利用Wall-1 與Wall-2 反射面產(chǎn)生多徑信號進行探測,將大大提高可探測區(qū)域的面積,同時,將會形成公共可探測區(qū)域,如圖1 中ΔBCF所表示的陰影區(qū)域。若對位于該區(qū)域內(nèi)的目標(biāo)進行探測,雷達接收機將收到來自Path 1 與Path 2 的兩條多徑信號,若能將兩條多徑信號聯(lián)合使用,將會提高檢測概率。本節(jié)中,基于已知的場景先驗信息,設(shè)計一種多路徑聯(lián)合檢測器,旨在對共同可探測區(qū)域內(nèi)的微弱多徑信號進行檢測并提高檢測概率。仿真表明,其檢測性能優(yōu)于單路徑的傳統(tǒng)檢測器。
2.1 提取有效多徑信號方法
利用雷達對遮蔽目標(biāo)進行探測時,回波信號中通常包含大量墻體等固定雜波,從而淹沒目標(biāo)的有效信號,使遮蔽目標(biāo)探測變得困難。由于墻體是靜止不動的,它的多普勒頻率為零,而目標(biāo)是運動狀態(tài)導(dǎo)致它產(chǎn)生的多普勒頻率分量不為零,利用這一點本文采用MTI 技術(shù)實現(xiàn)固體雜波的濾除,提取出有效的多徑信號。一次對消器的結(jié)構(gòu)圖如圖3所示。
圖3 一次對消器的結(jié)構(gòu)框圖
2.2 檢測器的設(shè)計
如圖1 所示,位于共同可探測區(qū)域的目標(biāo),基于毫米波雷達的高分辨率特性,Path 1 與Path 2 的多徑信號通常不屬于同一距離檢測單元。因此,針對該區(qū)域內(nèi)的目標(biāo)檢測問題,可以描述為如下的二元假設(shè)檢驗問題:
式中:ri表示來自Pathi的雷達多徑回波;α1與α2分別表示Path 1 與Path 2 的多徑回波信號的幅度值;p1與p2分別表示Path 1 與Path 2 對應(yīng)的陣列導(dǎo)向矢量,其中;wi表示雜波及噪聲,假定為獨立同分布的復(fù)高斯隨機向量,均值為0,協(xié)方差矩陣M>0。
假設(shè)M已知,α1與α2未知,采用廣義似然比(GLRT)方法設(shè)計多徑檢測器。在H0的假設(shè)下,r的概率密度函數(shù)(PDF)可表示為
在H1的假設(shè)下,r的概率密度函數(shù)可表示為
由式(7)與式(8)可得對數(shù)似然比為
由于α1與α2未知,對其進行估計,估計值如下:
將α1與α2代入式(9)中,得到多路徑聯(lián)合檢測器的表達式為
式(10)中的M可用估計的協(xié)方差矩陣S替代,S的表達式為
式中,k表示選取用于估計噪聲協(xié)方差矩陣的訓(xùn)練單元序號。
多路徑聯(lián)合檢測器的操作步驟可簡要描述如下:
第1步:根據(jù)定位精度要求,將感興趣的區(qū)域劃分為M×N的網(wǎng)格,將每個網(wǎng)格點的中心坐標(biāo)記為(xm,yn),其中m= 1,2,…,M,n= 1,2,…,N;
第2 步:計算每個網(wǎng)格點中心(xm,yn)關(guān)于反射面所對應(yīng)的虛假網(wǎng)格點坐標(biāo)(x'm,y'n),并計算(x'm,y'n)至雷達R的距離dmn及波達角θmn;
第3步:根據(jù)dmn所在距離單元提取雷達回波數(shù)據(jù),得到式(11)中的r;
第4 步:根據(jù)波達角θmn計算得歸一化陣列導(dǎo)向矢量p;
第5步:由式(12)估計噪聲協(xié)方差矩陣得M;
第6 步:根據(jù)式(11),對每一個網(wǎng)格點計算得到Tmn;
第7 步:將Tmn與門限γ進行比較,若Tmn>γ,則Tmn所對應(yīng)的網(wǎng)格點存在目標(biāo),且目標(biāo)位置為(xm,yn)。
2.3 性能對比
為了驗證所提檢測器的性能優(yōu)勢,采用蒙特卡洛仿真實驗,在給定虛警概率Pfa= 10-4的情況下通過檢測概率Pd來評估所提檢測器的性能,并與文獻[14]中的AMF 檢測器進行對比。為了控制計算量,進行100∕Pfa次獨立的蒙特卡洛仿真實驗。在信號強度α1與α2選取不同值時,所提檢測器及AMF 檢測器的性能曲線如圖4 所示。仿真參數(shù)于表1中給出。
表1 仿真參數(shù)表

圖4 多路徑聯(lián)合檢測器與AMF檢測器性能對比圖
從圖4 中可以看出,當(dāng)α2=0.06α1時,所提檢測器與AMF 檢測器的性能相似;當(dāng)α2≥0.06α1時,相同SINR 下,所提出多路徑聯(lián)合檢測器的性能明顯優(yōu)于AMF 檢測器;當(dāng)α2=0.5α1與α2=α1時,同等SINR 下,多路徑聯(lián)合檢測器的檢測性能較AMF 檢測器具有較大的性能提升。然而,當(dāng)α2=0,即第二條多路徑不存在時,所提檢測器的檢測性能較AMF有所下降。
綜上所述,在多條多徑信號存在時,所提檢測器利用包含目標(biāo)的多條路徑進行目標(biāo)檢測,根據(jù)不同路徑信號強弱的相對關(guān)系,檢測性能均有不同程度的提高;然而,如果將干擾或者雜波誤認(rèn)為提供目標(biāo)信息的多徑信號,會降低SINR,進而利用本文所提出檢測器進行檢測,檢測性能必然下降(即α2= 0的情況)。
3 實驗結(jié)果與分析
針對本文所研究的L 型非視距目標(biāo)檢測定位問題,利用所提出的算法展開相應(yīng)實驗。
3.1 毫米波雷達及實驗場景介紹
實驗設(shè)備采用TI 公司AWR1843 車載雷達板和DCA1000 數(shù)據(jù)采集卡作為收發(fā)信號,如圖5 所示。實測場景選用桂林電子科技大學(xué)南寧研究院A6樓,如圖6所示。
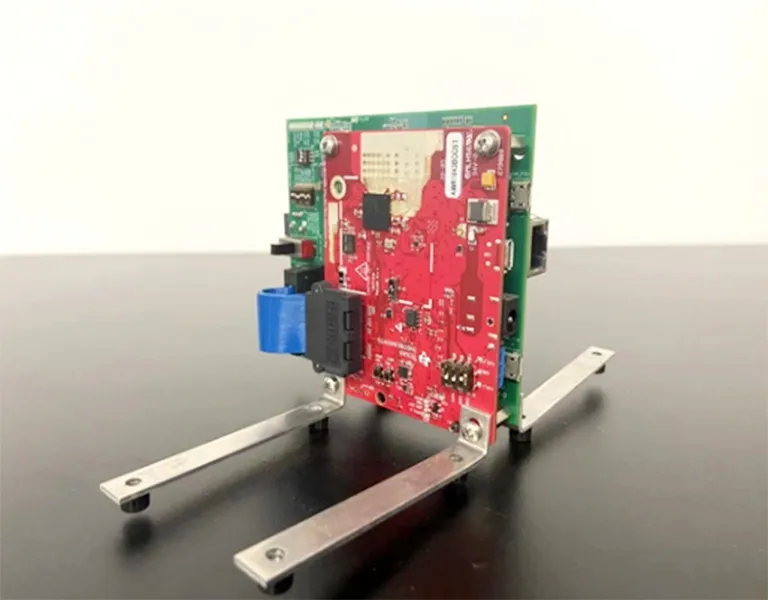
圖5 毫米波雷達實物圖
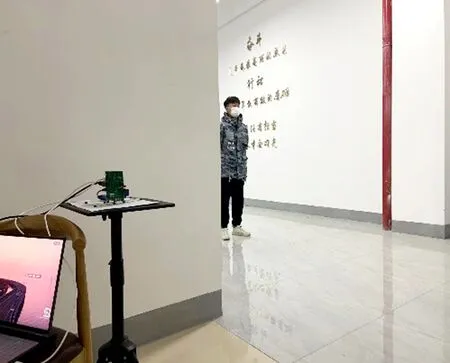
圖6 實驗場景圖
3.2 實驗
為了驗證毫米波雷達的多徑傳播模型及利用多徑信號對非視距目標(biāo)進行檢測定位的可行性,通過所提檢測器及現(xiàn)有的多徑定位算法,在一個L形走廊里采集數(shù)據(jù)進行實驗。選取雷達天線陣列中心所在位置為坐標(biāo)原點。針對不同的實驗?zāi)康模M行了如下三組實驗,給出實驗結(jié)果并進行分析。
實驗1:雷達布設(shè)位置對可探測區(qū)域的影響
為了驗證毫米波雷達的多徑傳播模型及雷達位置對可探測區(qū)域的影響,對于非視距區(qū)域中的微動目標(biāo)(目標(biāo)輕微左右搖擺)進行探測,采用二脈沖對消進行動目標(biāo)顯示,再經(jīng)過二維FFT,得到目標(biāo)某一時刻的距離-多普勒圖像如圖7 所示。圖7(a)為待測區(qū)域及目標(biāo)所在位置圖,目標(biāo)的所在位置為P(12.7,5),P(21,2),P(32,2),P(41.5,4),雷達位置(θ,d)為(30°,1) 。理論上,目標(biāo)分別位于由Wall-1產(chǎn)生的可探測區(qū)域、Wall-2產(chǎn)生的可探測區(qū)域、共同可探測區(qū)域及不可探測區(qū)域;對位于P4處的不可探測區(qū)域內(nèi)的目標(biāo),通過移動雷達位置到(10°,0.5 ),并進行重新探測,結(jié)果如圖7(f)所示。對比圖7(b)、(d)或(c)、(d)可知,對于拐角區(qū)域內(nèi)的單目標(biāo),通過Wall-1 或Wall-2 產(chǎn)生的一次反射多徑信號都能探測到目標(biāo),并且當(dāng)目標(biāo)處于共同可探測區(qū)域時,雷達將接收Wall-1 與Wall-2 產(chǎn)生的兩條多徑回波(圖7(d)所示);對比圖7(e)、(f)可知,對位于同一位置的目標(biāo),通過移動雷達位置,可以成功探測到原本無法探測到的目標(biāo)。綜上,通過合理布設(shè)雷達,將有效提高對非視距區(qū)域隱藏目標(biāo)的成功探測。
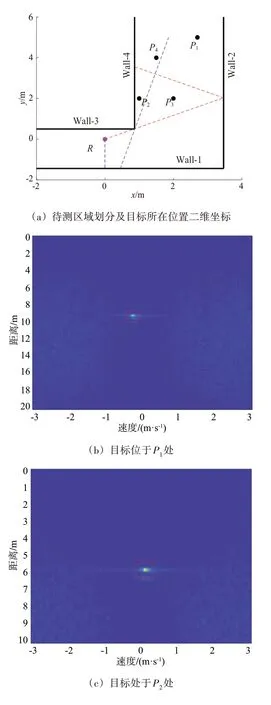
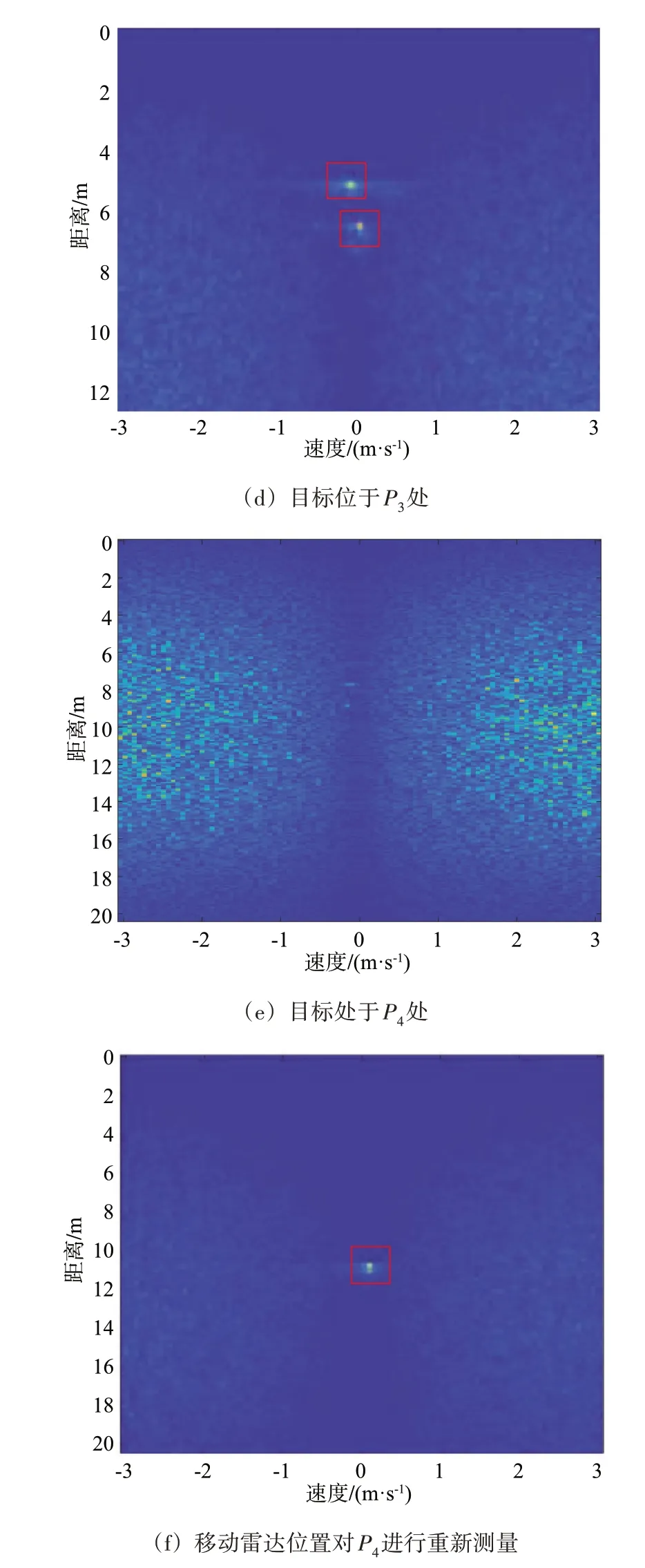
圖7 目標(biāo)處于不同位置時的距離多普勒圖
實驗2:微動目標(biāo)定位
針對位于共同可檢測區(qū)域內(nèi)的目標(biāo),利用所提多路徑檢測器進行檢測定位,數(shù)據(jù)處理流程如2.2 節(jié)所述。實驗中,雷達位置為(30°,1),微動目標(biāo)的真實位置為(2,2),設(shè)置感興趣的檢測區(qū)域為:X=1~3 m,Y=0.5~3 m,定位精度為0.15 m,即以0.15 m 的間隔將場景網(wǎng)格化。分別用本文所提檢測器及AMF 檢測器對目標(biāo)進行檢測定位,結(jié)果如圖8 和圖9 所示。由圖8 與圖9 可知,無論采用多路徑聯(lián)合檢測器或AMF 檢測器對位于(2,2)處的目標(biāo)進行檢測定位,均可以將目標(biāo)定位于(2.05,1.867)的位置,與目標(biāo)真實位置相近。但對比兩圖可知,采用多路徑聯(lián)合檢測器對目標(biāo)進行檢測,由于將多路徑聯(lián)合處理,可以提高目標(biāo)所在網(wǎng)格點的值,更加有利于檢測能量較弱的目標(biāo)。
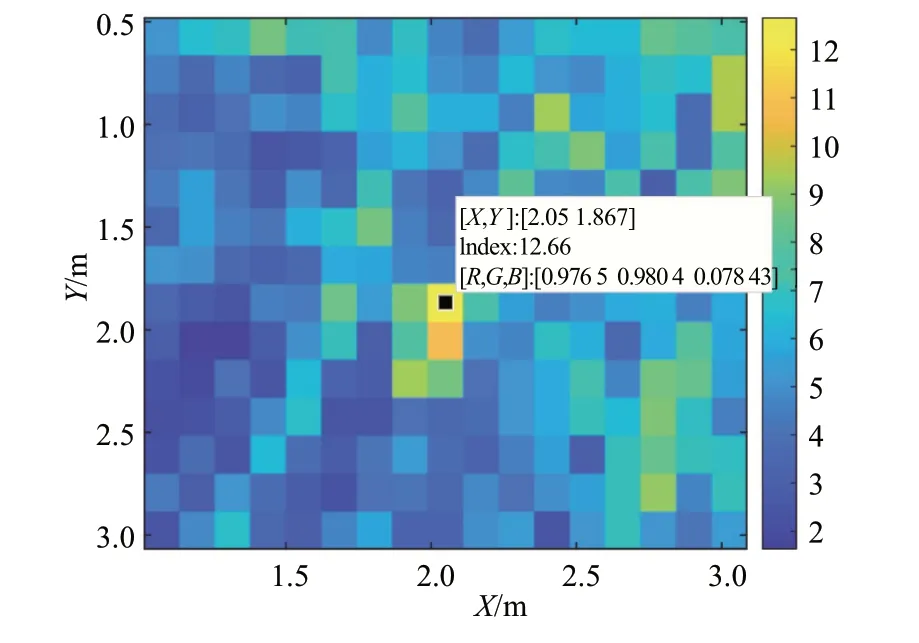
圖8 多路徑聯(lián)合檢測器定位二維坐標(biāo)結(jié)果
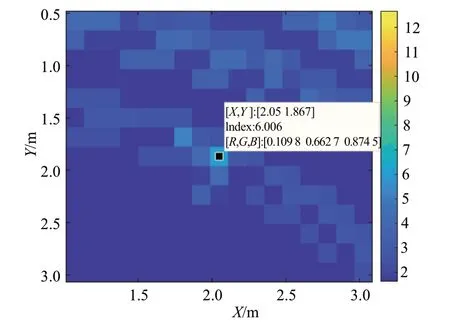
圖9 AMF檢測器定位二維坐標(biāo)結(jié)果
實驗3:運動目標(biāo)定位
在L 形走廊模擬室內(nèi)反恐場景,雷達位于(30°,1),目標(biāo)由(1,2)的位置沿直線行走至(2,2),再沿直線行走至(2,5)處,基于3.2 節(jié)中多路徑聯(lián)合檢測器定位方法,采用CA-CFAR 檢測,通過DSP進行信號處理,最終的檢測定位結(jié)果如圖10所示。當(dāng)目標(biāo)由Wall-2 構(gòu)成的可探測區(qū)域移動到共同可探測區(qū)域,再移動至由Wall-1 構(gòu)成的可探測區(qū)域時,雷達將接收到來自兩面墻的反射多徑信號,因此,利用寬波束雷達同時獲取多個反射面的多徑信號在實際運用中是可行的;圖10 中紅線表示目標(biāo)真實運動軌跡,利用上述定位方法對遮蔽運動目標(biāo)進行不斷定位,考慮到人體反射面積的誤差影響,仍可以清晰地得到目標(biāo)運動軌跡。
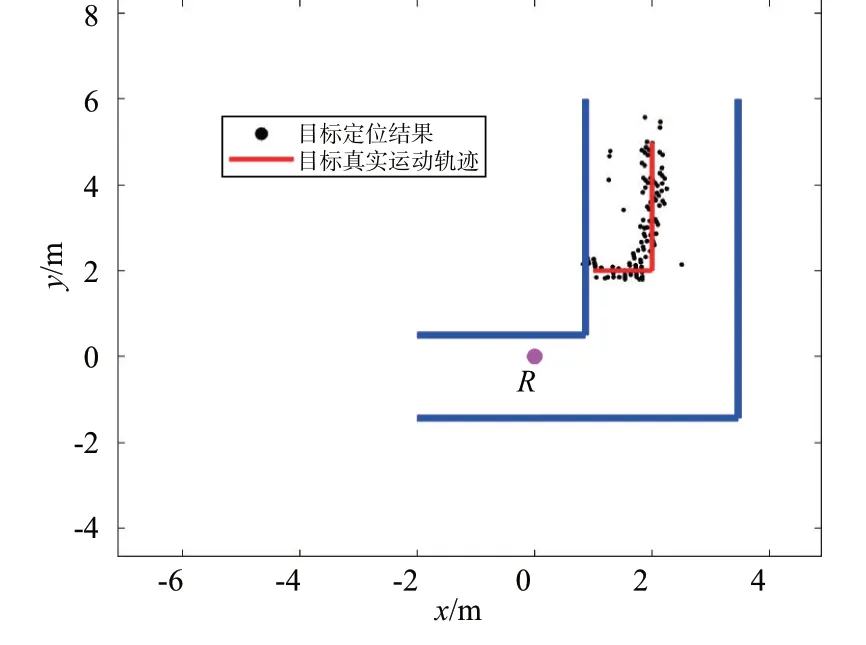
圖10 運動目標(biāo)運動軌跡二維坐標(biāo)實驗
4 結(jié)束語
本文基于毫米波雷達對L 型非視距區(qū)域的目標(biāo)檢測定位問題進行了分析與研究。對雷達位置與可探測區(qū)域間的關(guān)系進行了理論與仿真分析,給出了雷達布設(shè)指南。此外,針對L型拐角非視距研究中存在可探測區(qū)域小的問題,提出利用寬波束毫米波雷達同時獲取多個反射面的信號提高可探測區(qū)域,并通過實驗驗證了該方法的有效性;其次,對位于由多個反射面構(gòu)成的共同可探測區(qū)域內(nèi)的目標(biāo),基于同一目標(biāo)不同路徑的多徑信號均包含目標(biāo)信息的原理,將多路徑聯(lián)合使用,設(shè)計了多路徑聯(lián)合檢測器,仿真結(jié)果表明,當(dāng)多路徑存在且達到一定強度時,該檢測器可以有效提高檢測性能,實驗表明了該檢測器的可行性與有效性;最后,針對非視距探測的實際應(yīng)用問題,根據(jù)2.2 節(jié)中的定位方法進行實驗,結(jié)果給出目標(biāo)位置信息。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
