神經網絡及其在智能交通系統中的應用綜述
2024-04-07 06:56:32丁清琳汪雪鐘王小強杜一君劉娣畢云蕊
交通科技與管理 2024年4期
丁清琳 汪雪鐘 王小強 杜一君 劉娣 畢云蕊
摘要 智能交通系統實現的是人、車、路與周邊環境的統一監管和控制,隨著人工智能技術的不斷發展,利用神經網絡提升智能交通系統逐漸成了我國重點關注的技術手段。文章梳理了BP神經網絡在交通流量預測、交通控制領域中的應用及其國內外研究現狀,并將近幾年國內外優化BP神經網絡的算法進行了對比分析。研究表明:BP神經網絡因其較多優勢廣泛應用于交通流預測、交通控制等方面,并且隨著各類算法的融合,可以使預測結果更為精準。BP神經網絡未來將會通過算法的改進、網絡結構的優化等為智能交通系統帶來新的突破。
關鍵詞 交通工程;智能交通控制;BP神經網絡;交通流預測
中圖分類號 TP183 文獻標識碼 A 文章編號 2096-8949(2024)04-0012-03
0 引言
智能交通系統(ITS)起源于20世紀60年代,它的概念于20世紀末開始在中國大力推廣,但是早期由于通信技術的不足導致發展的速度比較緩慢。隨著科學技術水平的大幅度提升、計算機行業的快速發展,我國交通系統融入了許多先進技術[1],例如神經網絡、人工智能、深度學習、大數據等。在過去的幾年里,ITS的廣泛應用有效緩解了交通堵塞、減少了交通事故以及尾氣排放污染等問題。誤差反向傳播神經網絡模型收斂較快,在智能交通系統中有廣泛的應用,包括客流量預測、交通狀態判別等[2]。
相對于CNN、DBN等神經網絡,BP神經網絡可以自主學習的同時還具有應對系統環境變化的自適應性,并且適合分析數據間的非線性映射,應用更為廣泛。從20世紀80年代開始,神經網絡逐漸走出低谷,發展迅猛。在此期間,BP算法不斷發展,一直受到學術界的廣泛關注。
1 BP神經網絡在交通流預測方面的研究與應用
近幾年來,BP神經網絡在交通流量預測、自動駕駛控制、交通控制等方面都有廣泛的應用。同時,研究者一直在針對BP神經網絡的缺陷進行模型改進,極大地推動了BP神經網絡在智能交通系統中的應用,并獲得了多項研究成果。
1.1 客流量預測
隨著社會經濟的提高,我國人均汽車擁有量也在逐年上升,導致交通堵塞現象日益嚴重。現階段,動態交通流是交通中的一個重大問題,交叉路口所反映的交通信號并不能很好地反映實際交通流,此外,絕大多數城市的交通燈控制系統采用了固定時間的策略,因而無法靈活地應對交通流的實時變化。
BP神經網絡具有良好的預測效果,為了很好地解決交通堵塞問題,研究者提倡采用BP神經網絡控制算法預測交通流,并通過智能交通信號控制系統來提高交通流調度效率。Ata A等[3]借助BP神經網絡對道路交通進行堵塞控制建模來實現預測,發現該機制很好地減少了交通堵塞現象,提高了旅游者的舒適度,有效作出了智能化的運輸決策。谷金晶等[4]兼顧優化決策和評價模型,將BP神經網絡算法和RBF神經網絡算法結合起來,使得高峰時段的公交資源得到了合理配置,并且提高了公交服務水平。
隨著技術的發展,智能交通已經逐步上升為交通領域的主流趨勢。準確穩定的短期交通預測模型對智能交通系統非常重要,預測結果越準確,交通堵塞就越容易緩解,交通出行的流動性就越順暢。這也是交通管理部門對交通堵塞等問題進行有效管理的重要依據。
1.2 車輛速度預測
隨著交通運輸業的發展,道路服務能力與出行需求之間的矛盾逐漸加劇,道路交通事故頻發。近幾年來,基于神經網絡的速度預測方法已經逐漸發展成熟,其中BP神經網絡的應用最為廣泛。
先進的車輛控制技術依靠準確的速度預測來作出生態和安全的決策,傳統預測算法的預測精度在達到一定精度后難以進一步提高;在提高預測準確性的過程中會出現過度擬合等問題。在提取固定路徑車速時,學術研究者充分利用了馬爾可夫和BP神經網絡的優勢,組合的MBNN預測模型可以將預測精度提高到25.3%,為插電式混合動力汽車能耗的可能優化提供了重要支持。為了使預測效果更為準確,有學者通過制定預測速度與其相應預測誤差之間的映射,構建了基于BP的預測速度誤差補償模塊,并選取雙車場景下和多車場景下的前置車輛進行隨機速度預測,證實了所提出的BN-BP融合方法具有一定的可行性。
考慮車輛的速度與駕駛員、車輛類型、交通流量等因素,國內外不少學者都基于BPNN分別對各類車輛的長期速度預測和短期速度預測進行了相關研究。此外,也有部分學者提出基于BP-LSTM算法的數據驅動車速預測方法,利用南京市真實駕駛數據對預測性能進行評價,研究并分析了該算法在能耗預測和行駛時間預測兩種場景中的有效性。
1.3 行駛時間預測
經濟的迅速發展導致交通擁堵加劇,科學合理地解決交通相關的問題已成為全社會的共識。BP神經網絡具有很好的非線性逼近效果,為進一步提高交通調度效率,可以利用BP神經網絡提出一種交叉口車輛通過模型,實驗表明BP神經網絡模型可以很好地預測交叉路口排隊車輛的通行時間,對運輸系統的通信性能和調度效率的提高具有重要意義。
智能網聯技術的不斷發展使獲取準確的公共車輛運行數據有了現實基礎。在智能交通系統中,準確預測公共車輛的到站時間,可以提高車輛運行效率,為車輛指揮調度和管理提供決策依據[5]。Liu等[6]利用BP神經網絡等算法,通過提供預測的終端到達時間來減少列車駕駛員的工作量,進而提高預測精度。但是在天氣條件惡劣、節假日或上下班高峰期、路段長度等外部因素的影響下,車輛的運行具有不穩定性和復雜性,這對車輛到站時間的預測增加了難度。于是有部分學者提出了基于k-NN和BP神經網絡的預測模型,不僅考慮了外部因素的影響,還可以準確描述交通流量趨勢,為交通樞紐管理方案規劃和ETC車道建設提供了指導。
2 BP神經網絡在交通控制系統方面的研究與應用
城市交通控制系統是智能交通系統中不可缺少的部分。BP神經網絡是一個高度并行的非線性、具有很高冗余度的系統,其在一些無法建立精確數字模型的系統中也具有獨特的優勢,可以有效提高交通效率。
2.1 信號燈控制
由于我國普遍還在使用固定的信號燈控制,在早晚高峰時一些復雜的交叉路口依舊會存在交通擁擠以及能源損耗等現象,因此如何實現快速、智能化的信號燈控制,依舊是個難題。
Du等[7]在分析十字路口實時交通計數的基礎上,提出使用BP神經網絡模型來估計和預測動態轉彎運動,結合多目標模型進行信號的實時控制參數和評價指標,從而實現交叉路口的實時信號控制。根據交叉路口的通行特點,邱祥[8]充分利用BP神經網絡具有自學習和自適應性的能力,運用BP神經網絡控制算法對交叉路口四個方向的交通流量與對應通行時間進行訓練。同時使用DSP處理器實現BP神經網絡控制算法,提高整個系統的可靠性與實時性,該系統為交通信號機的開發提供了一種可以提高車流量的調度效率。然而,降雨天氣會導致城市交通運行效率明顯下降,李玉祺等[9]利用BP神經網絡算法對隨機需求的城市道路交通網絡設計問題進行了相關的研究。
2.2 交通系統控制
智能交通系統是現代交通技術的重要組成部分,它既是綜合應用領域,也是前沿交叉領域,與很多技術緊密相關。在智能交通系統中,由于周邊動態環境和實時環境的影響,傳統的CH識別受到一定的干擾,在位置識別方面略有缺陷。在無人駕駛方面,Li等[10]將BP神經網絡算法用于優化混合動力轉向系統的網絡結構、參數和權重系數中,優化BP神經網絡的初始權重,建立GA-BPNN模型。仿真結果表明,該算法可以很好地加快轉向扭矩權重調整的收斂速度和轉向系統的響應速度和靈活性,進一步保證無人駕駛的安全性和穩定性。在智能交通系統中,車載網絡極易受到干擾,因此VNs的故障頻頻復發,Geng等[11]利用粗糙集和BP神經網絡提出一種新的VNs故障預測方法,在數據預測模塊中,將灰色理論和BP神經網絡的優點結合成灰色BP神經網絡對數據進行預測,最后NS-2和MATLAB對故障預測算法的仿真分析得出該算法的準確性和可行性。
3 BP神經網絡融合其他算法的比較
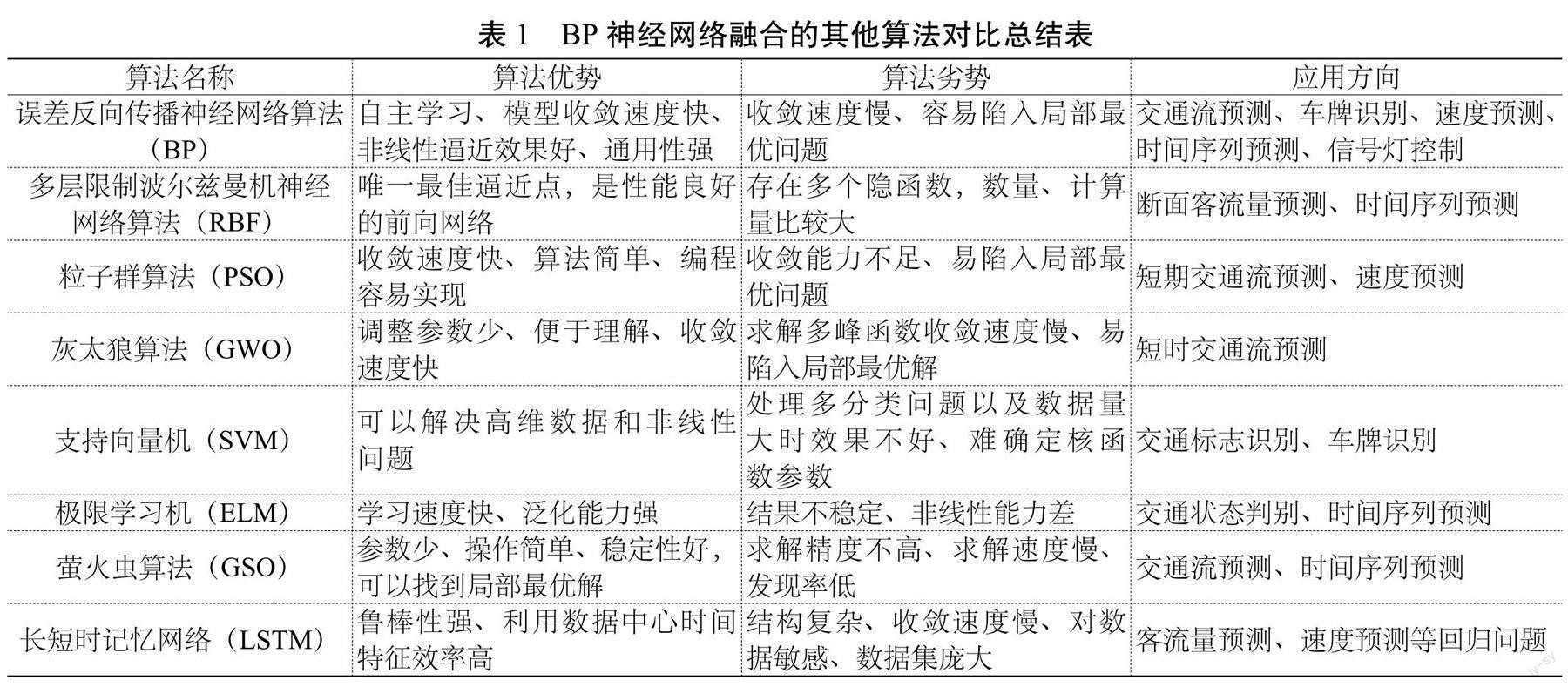
BP神經網絡的發展中融合了很多其他的算法,使得BP神經網絡的應用更為廣泛,最常用的融合算法的優勢、劣勢和應用的對比,如表1所示。
由表1可以看出,BP、SVM、ELM、GSO廣泛用于交通流預測、車牌識別、標志識別和時間序列預測。相比傳統的識別檢測、特征提取的局限性,計算精度跟不上、速度難以滿足要求等,采用最廣泛應用的神經網絡——BP神經網絡,利用最速下降法的學習規則以及誤差逆傳播算法進行多層前饋網絡的訓練,有助于更全面地提取特征。隨著技術發展和其他算法的融入,BP神經網絡在訓練中的數據規模要求和訓練要求,都已逐漸解決。
4 結語
近年來,智能交通的可持續發展處于發展階段,隨著對智能交通的重視程度不斷提高,BP算法也在智能交通中被廣泛應用。該文深入回顧了BP神經網絡在智能交通系統中的應用,從交通流量預測、交通系統控制等方面,充分論述了BP神經網絡在智能交通系統中的廣泛應用,以及幾種BP融合的常見算法對比,明確了BP神經網絡的優勢。該文研究表明,在結合BP神經的智能計算工具的前提下,神經網絡充分發揮優勢,必將是未來智能交通預測方法的發展趨勢。
影響智能交通通行率的因素較為復雜、隨機,目前單個已經較為成熟的BP、PSO、LSTM、CNN等并不能達到交通流準確預測、精準識別等要求。深度神經網絡幾乎可以將任何類型的數據作為輸入,并且可以以近似非線性函數來對該數據進行預測,目前深度學習主要結合模型并行和數據并行,利用深度神經網絡開發并行訓練算法可以有效提高道路交通的實時性。設計智能交通紅綠燈控制系統,致力于尋找針對時序控制方式適應性不佳、時間分配不當以及感應控制方式不足等問題的解決方案。再利用LSTM、GSO等算法進一步對BP神經網絡進行優化,在實時性的基礎上不斷地提高預測精準度,使神經網絡在智能交通系統中最大限度地被利用。雖然BP神經網絡算法應用于多領域,但其在訓練過程中存在對初始閾值敏感等問題,有待進一步研究和完善。相信在未來的發展過程中,BP算法與其他學科技術相融合,對二者都有技術上的互相補充。神經網絡在交通智能系統的應用是一個充滿巨大創新、創造的科技領域,在神經網絡的背景下,該文探討了BP神經網絡在智能交通領域的應用,并對相關研究進行了綜述,期望可以為促進智能交通與神經網絡學科深度交叉提供新的思路和方向。
參考文獻
[1]陸化普. 智能交通系統主要技術的發展[J]. 科技導報, 2019(6): 27-35.
[2]王笑京, 張紀升, 宋向輝, 等. 國際智能交通系統研發熱點[J]. 科技導報, 2019(6): 36-43.
[3]Ata A, Khan M A, Abbas S, et al. Modelling smart road traffic congestion control system using machine learning techniques[J]. Neural Network World, 2019(2): 99-110.
[4]谷金晶, 江志彬. 基于神經網絡客流預測的高峰期公交時刻表優化[J]. 交通信息與安全, 2017(2): 109-114.
[5]周姝彤. 考慮時間因素影響的網聯公交車輛到站時間預測研究[D]. 南京:東南大學, 2022.
[6]Liu Y, Tang T, Xun J. Prediction algorithms for train arrival time in urban rail transit[C]//2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC). IEEE, 2017: 1-6.
[7]Du L, Jiao P, Wang H. A multi-objective traffic signal control model for intersection based on BP neural networks[M]//Challenges and Advances in Sustainable Transportation Systems. 2014: 451-458.
[8]邱祥. 基于神經網絡的智能交通控制系統設計[D]. 揚州:揚州大學, 2017.
[9]李玉祺, 王廣民, 徐猛. 隨機OD需求下城市道路交通網絡設計問題BP神經網絡算法研究[J]. 系統工程理論與實踐, 2021(11): 3009-3019.
[10]Li Yong, Xu Xing and Wang Wujie. GA-BPNN Based Hybrid Steering Control Approach for Unmanned Driving Electric Vehicle with In-Wheel Motors[J]. Complexity, 2018: 1-15.
[11]Geng R, Wang X, Ye N, et al. A Fault Prediction Algorithm Based on Rough Sets and Back Propagation Neural Network for Vehicular Networks[J]. IEEE Access, 2018, 6: 984-992.
收稿日期:2023-12-08
作者簡介:丁清琳(2000—),女,研究生,研究方向:智能交通。
基金項目:1.國家自然科學基金青年項目“智能網聯車環境下異質交通流機理建模及路網車路協同控制方法研究”(No.62303214);2.南京工程學院創新基金面上項目“基于不同智能網聯車輛滲透率的車路協同優化控制研究”(CKJB202203);3.江蘇省自然科學基金青年項目“基于模糊學習的有遮擋人臉識別研究”(BK20201043)。