基于ROS 的室內移動機器人多目標點導航研究與實現
2024-04-20 17:09:54鄒看看張軍王棟
電子制作 2024年7期
鄒看看,張軍,王棟
(安徽理工大學 人工智能學院,安徽淮南,232001)
0 引言
近年來,機器人技術日新月異[1],移動機器人在未知環境中的自主導航問題導航機器人的研究已引起科研工作者的極大興趣,特別是隨著智能機器人在工業生產、物流倉儲搬運、災害救援等領域的廣泛應用[2]。移動機器人自主導航的關鍵技術包括兩個方面。一方面,同時定位與地圖構建(SLAM)技術[3]是實現機器人自主導航的前提。SLAM 技術通常與激光雷達或深度相機搭配使用,機器人通過搭載的傳感器獲得未知環境的點云數據以及深度數據,隨著機器人不斷感知周圍環境,機器人利用得到的數據完成對周圍環境二維柵格地圖的構建。另一方面,機器人定位與路徑規劃是實現機器人自主導航的關鍵。路徑規劃使機器人在復雜的環境中規劃出一條合適的路線到達目標點,并且在移動過程中避開臨時出現的障礙物。機器人定位確定機器人當前所在位置,幫助機器人按照設定的路線行駛。
文中基于自行搭建的機器人平臺,構建一整套自主導航系統,使機器人能夠在未知環境下進行柵格地圖構建,并且在構建的環境地圖中實現多個目標區域的巡檢任務。
1 機器人移動平臺
移動機器人平臺采用差速底盤結構,機器人平臺如圖1所示,前輪的作用是支撐底盤,兩個后輪為驅動輪。可以實現復雜環境中靈活移動,相比于全向移動機器人成本更低,適合大規模生產。同時差速移動機器人運動學解算簡單,計算量小,開發效率高[4]。移動機器人采用模塊化設計思想,建立基于移動機器人平臺的建圖和導航的系統框架。根據硬件功能不同,下面分別對兩大系統做詳細介紹。器人移動平臺可分為兩大部分:上位機系統和下位機系統。
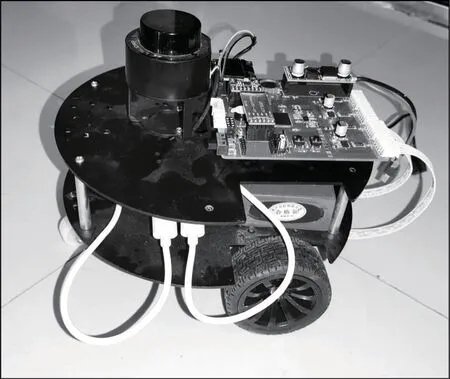
圖1 移動機器人平臺
1.1 上位機系統設計
上位機系統主要負責復雜算法的實現,總體框架圖如圖2 所示。上位機系統由兩部分組成樹莓派主機和在PC 從機,兩者通過WiFi 進行通信。樹莓派相較于PC 具有體積小,易搭載的優點,更適合裝載在室內小型機器人。然而樹莓派計算能力有限且沒有顯示器,為了實現人機交互和遠程控制,通過WiFi 分布式通信將樹莓派與PC 端連接[5]。樹莓派作為上位機系統的主機,主要負責建圖算法的數據處理,主要包括基于激光雷達的Gmapping 算法、局部路徑規劃算法、全局路徑規劃算法、多傳感器融合算法和同下位機系統實時數據交互。PC 端作為上位機系統的從機,主要負責人機交互、遠程控制以及一些組件的使用。ROS 系統下主機與從機的配合使用大大提高了機器人系統的開發效率。
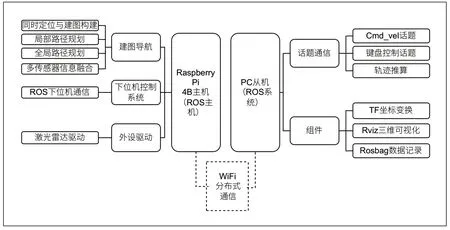
圖2 上位機系統框架圖
1.2 下位機系統設計
移動機器人平臺采用STM32VET6作為控制核心,下位機系統設計框圖如圖3所示。下位機系統以模塊化設計思想將整個系統分為四個部分:電機控制、IMU 數據讀取、里程計數據讀取、ROS 數據通信以及LCD 屏信息顯示。下位機系統根據里程計數據以及上位機系統下發的目標轉速進行PID 控制[6]。里程計數據與IMU數據也將通過USART 通信上傳到ROS 系統,并進行算法融合,推算機器人的位姿信息。

圖3 下位機系統框架圖
2 二維柵格地圖創建
ROS 支持多種SLAM 算法,主流的是Hector SLAM 和Gmapping,其中Hector SLAM 僅依靠激光雷達就可以正常工作;Gmapping 算法則在激光雷達的基礎上,融合了電機編碼器里程計等信息,其建圖穩定性高于Hector SLAM。本文使用的是Gmapping。Gmapping 包含了粒子濾波算法,為開發者免去內部復雜實現,提高開發效率。二維柵格地圖構建流程如圖4 所示,主要完成對周圍環境二維柵格地圖的構建,為后續的機器人定位與多點導航提供基礎。

圖4 地圖創建流程圖
使用Gmapping 功能包構建地圖時最重要的一步是Gmapping 功能包參數設計,以下是部分參數設計:
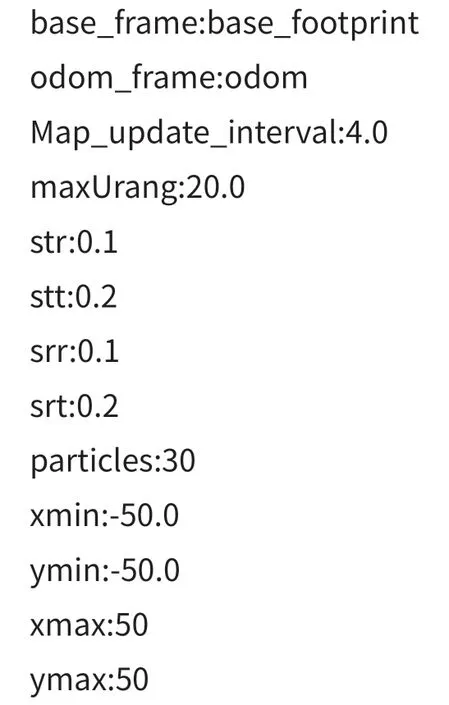
每一個參數都影響建圖效果[7]。其中,map_update_interval 是地圖刷新頻率,若數據設置過大會導致建圖效率低。相反會占用過多的樹莓派資源導致發熱卡頓。maxUrang 是激光雷達能夠探測的最大值,本文使用的激光雷達最大檢測范圍為25 m,此處設置為20.0 足夠大部分室內場景使用。particles 是Gmapping 算法中的粒子數。合適的粒子數保證算法比較準確同時有較高的速度。
3 導航系統構建
導航系統中的關鍵技術是定位和路徑規劃兩方面。機器人路徑規劃是指機器人在指定的區域內規劃出一條合理的從起始點到目標點的路徑。move_base 功能包提供了基于動作(action)的路徑規劃實現[8],主要由全局路徑規劃和局部路徑規劃組成。機器人定位通過判斷機器人的當前位置是否符合預期結果,確保機器人按照規劃的路線前進。AMCL 功能包提供了定位功能,可實現機器人的準確定位。AMCL 功能包根據已有的地圖使用粒子錄波器推算機器人的具體位置。導航系統構建流程如圖5 所示,實現多點導航功能。
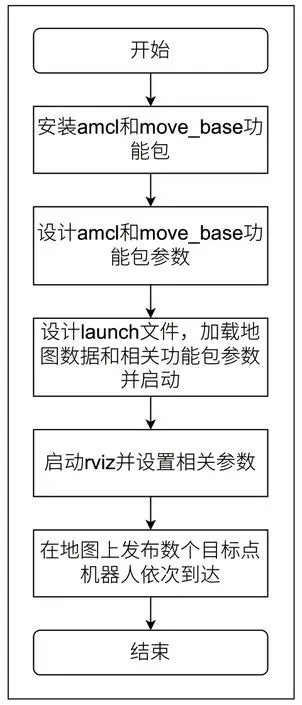
圖5 導航系統構建流程圖
3.1 AMCL 功能包
AMCL 是一種自適應蒙特卡洛定位算法[9],利用使用激光雷達數據和地圖信息來估計機器人在地圖上的位置。在導航過程中會因為外界環境導致里程計出現誤差,誤差累計,從而引發到達目標點失敗的問題。AMCL 功能包可以根據機器人的激光雷達數據,對機器人的位置進行估計[10]。AMCL 的估計流程如下:
(1)初始化粒子群:根據機器人所在大致位置,初始化一定數量的粒子。
(2)運動模型更新:根據機器人里程計數據,計算每個粒子的權重。
(3)傳感器模型更新:根據激光雷達數據計算每個粒子的權重。
(4)重采樣:根據粒子的權重,使具有較低權重的粒子被刪除,較高權重的粒子被復制,并更加密集的表示機器人的位置。
AMCL 功能包基本參數設計如下:
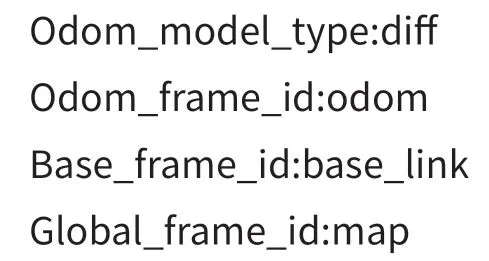
其中Odom_model_type 為里程計模型選擇,本文為差速機器人設置為diff,全向輪可設置為omni。Odom_frame_id 設置里程計坐標系。Base_frame_id 設置機器人極坐標系。Global_frame_id 設置地圖坐標系。
3.2 move_base 功能包
move_base 功能包是由多個節點及其參數配置組成的復雜系統。其中,主要的節點包括了全局路徑規劃器和局部路徑規劃器,當機器人運動時,全局路徑規劃器會根據機器人目前位置坐標和目標點位置坐標,在地圖上規劃出一條可行的全局路徑;而局部路徑規劃器則會根據機器人傳感器數據實時地更新局部路徑,避免機器人發生碰撞等意外事件[11]。同樣,move_base 功能包也配置參數,以下是幾份相關的文件。
3.2.1 通用參數配置
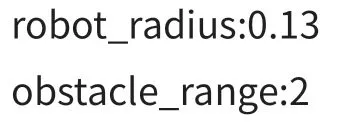
其中:robot_radius 為機器人半徑,機器人底盤為圓形半徑為0.13。obstacle_range 是將機器人周圍2m 范圍內的新的障礙物添加到地圖中,raytrance_range 則是將不存在的障礙物從地圖中刪除。Information_radius 是障礙物的擴展半徑,防止機器人發生碰撞。coservation_sources 是導航中需要的傳感器,本文使用的是激光雷達。
3.2.2 全局代價地圖參數設置
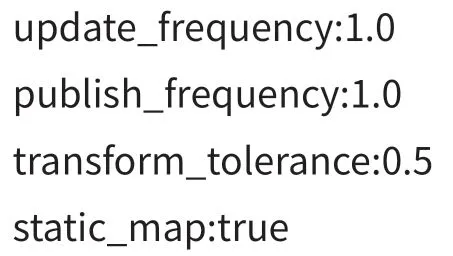
其中:update_frequency 的作用是確定代價地圖更新頻率,而publish_frequency[12]是確定代價地圖發布的頻率,這兩個參數都被設定為1Hz。此外,transform_tolerance 的作用是確定等待坐標轉換發布的最大延誤時間,這個數值設定為0.5 秒。最后,static_map 的作用則是用于確定是否使用已有的地圖來初始化全局代價地圖,為了使用之前創建的二維柵格地圖,這里設置為true。
3.2.3 局部代價地圖參數設置

其中,局部代價地圖與全局代價地圖參數含義大致相同。但是因為室內環境的復雜性,局部代價地圖static_map 設置為false,使用動態窗口。width 和height 局部地圖的高度和寬度,這里都設置為2m。resolution 設置局部地圖的分辨率為0.05,與靜態地圖分辨率保持一致。
4 建圖和導航實驗
為了驗證軟硬件設計的可行性,根據前文的地圖構建方案以及導航系統方案,完成移動機器人平臺的搭建,并對機器人平臺二維柵格地圖構建與多點導航功能進行測試。
4.1 二維柵格地圖構建測試
試驗場地選擇宿舍樓茶水間和樓梯間兩間房,如圖6 所示。通過鍵盤控制節點遠程控制機器人移動,機器人最大角速度設置為0.2rad/s,最大線速度設置為0.1m/s,低速行駛建圖更加準確。機器人遍歷整個環境后,地圖效果如圖7 所示。對比圖6 和圖7可以看出,構建的地圖可以準確體現真實的環境特征。

圖6 實驗場地現場圖
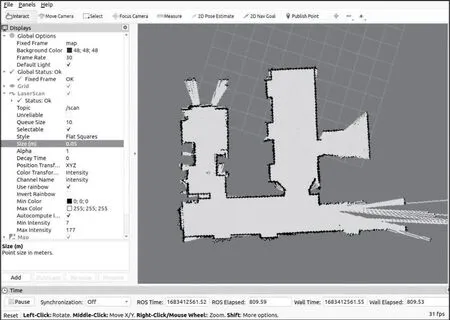
圖7 實驗場地地圖創建效果圖
4.2 導航實驗
導航實驗是在上節構建的地圖的基礎上進行的,機器人需要滿足合理的路徑規劃,避免與障礙物發生碰撞,并且能夠進行多點導航,到達各個設置的目標點。
在本次測試中,在地圖上設置了0~16 共17 個目標點,機器人依次到達17 個點位,當到達目標點16 點后機器人又重新規劃到0 點的路線進行下一次的循環,當然在機器人運行過程中也可以新增目標點。效果圖如圖8 所示。圖8分別是9 點到10 點以及15 到16 點的導航效果圖,可以看出路徑規劃平滑合理,與墻壁或其他障礙物保持一定距離,沒有發生碰撞。機器人導航系統構建成功,成功到達各個目標點,實現多點導航功能。
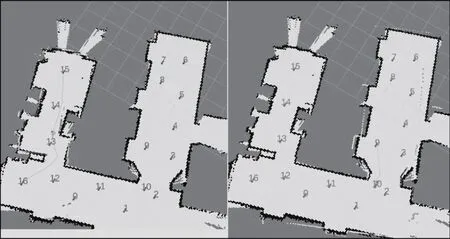
圖8 多點導航實驗效果圖
5 結論
論文以室內移動機器人多目標點導航系統研究與實現為目的,設計了移動機器人平臺,該機器人平臺上位機采用樹莓派作為控制中心實現相關算法,下位機采用STM32 作為控制中心驅動電機與相關數據采集。基于搭建的實驗平臺完成了相關的實驗。實驗結果表明:該機器人移動平臺能夠完成室內復雜環境的柵格地圖構建,且建圖效果良好;并且基于構建的地圖實現了多點導航功能。該項技術對于各種巡檢機器人的導航定位系統的開發具有較高的參考價值。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:21
中國衛生(2016年2期)2016-11-12 13:22:16
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19