基于多軟件平臺的二維重載精密轉臺的控制特性仿真分析及優化
2024-04-29 12:22:19楊東明胡曉兵郭亮官濤
四川大學學報(自然科學版) 2024年1期
楊東明 胡曉兵 郭亮 官濤
為提高二維重載精密轉臺動態特性,基于AMEsim、ADAMS以及Simulink多軟件機電一體化聯合仿真對系統控制特性進行仿真分析.本文使用AMESim建立電機模型,Adams建立二維重載系統的動力學模型,使用Simulink工具箱建立PID控制模型,最終建立三軟件聯合仿真模型對系統階躍響應進行仿真分析;針對系統存在時變性、非線性和負載干擾等因素的問題,采用自適應模糊PID控制算法對系統進行控制優化.仿真結果表明,模糊PID控制算法有著響應快、無超調,穩定誤差較普通PID控制減小37%左右等優點.
二維重載精密轉臺; 平臺聯合仿真; 控制優化; 模糊PID控制
TN955; TP273.2 A 2024.017001
Simulation analysis and optimization of control characteristics of ?two-dimensional heavy-duty servo transmission system ?based on multi-software platform
YANG Dong-Ming ?1,2 , HU Xiao-Bing ?1,2 , GUO Liang ?3 , GUAN Tao ?3
(1.School of Mechanical Engineering, Sichuan University, Chengdu 610065, China;
2.Industrial Technology Research Institute of ?Yibin Sichuan University, ?Yibin 644600, China;
3.The 29th Research Institute of China Electronics Technology Group Corporation, Chengdu 610036, China)
To improve the dynamic characteristics of two-dimensional heavy-duty precision turntable, the control characteristics of the system are simulated and analyzed based on multi-software mechatronics joint simulation with AMEsim, ADAMS and Simulink. In this paper, the joint simulation model includes the motor model, the dynamic model of two-dimensional heavy-duty precision turntable and the PID control model which are established by AMESim, Adams and Simulink tools respectively, this joint simulation model is then used to simulate and analyze the step response of the system. Aiming at the problems of time-varying nonlinear load interference and other factors in the system, adaptive fuzzy PID control algorithm is used to optimize the control of the system. The simulation results show that the fuzzy PID control algorithm has the advantages of fast response and no overshoot, and the stability error is reduced by about 37% compared with the common PID control.
Two-dimensional heavy-duty precision turntable; Platform co-simulation; Control optimization; Fuzzy PID control
1 引 言
二維重載精密轉臺在航空航天、空間探索和軍事工業等領域被廣泛應用,而伴隨行業發展對二維重載精密轉臺的控制系統精度要求也越來越高.作為機電一體化系統,其機械、控制領域國內外開發研究了不同數字仿真分析軟件,主流仿真軟件有AMEsim、ADAMS、Matlab,使用單個軟件仿真分析方面,現有Bhise等提出僅使用simulink軟件對被動與半主動懸架系統進行仿真分析 ?[1] ;何豐碩等提出僅使用AMESim對燃油計量系統進行設計仿真分析 ?[2] ;魏平芳等提出僅使用ADAMS軟件對車輛行駛穩定性進行動力學仿真分析 ?[3] ;為了提高耦合復雜系統仿真精度,周宇等提出ADAMS和AMESim對挖掘機軌跡控制進行仿真分析 ?[4] ;李泉等提出使用MATLAB和ADAMS軟件對鉆頭拉伸裝置進行仿真分析 ?[5] ;馬志國等提出使用ADAMS、AMESim、Simulink軟件對油氣懸架動態性能影響因素進行仿真分析 ?[6] .考慮到傳統單領域仿真分析軟件在面對本文多領域耦合的二維重載精密轉臺時難以滿足仿真精度的要求,因此本文采用以AMEsim、ADAMS以及Simulink作機電一體化聯合仿真的方法.由于AMEsim軟件本身的特點在對機械模型進行動力學仿真分析時,忽略模型的具體輪廓特征細節,僅僅將模型動力學分析簡化為公式計算,因此不能準確地模擬系統工作情況,仿真結果存在一定誤差.相比較使用AMEsim軟件,ADAMS作為當前CAE領域應用最廣泛的機械系統動力學仿真分析軟件,采用虛擬樣機技術,在建立完整復雜模型的基礎上提供ABAM等積分求解算法,可以對系統運動、受力等進行精確仿真分析.因此三軟件聯合仿真的方法相比較僅使用Amesim與Simulink軟件,可以提高整體模型求解精度,更加貼近實際樣機模型,且無需僅使用Simulink軟件時需要計算出系統的精確數學模型.
作為復雜耦合多領域復雜系統,二維精密轉臺存在時變性、非線性及負載干擾等問題.普通PID控制因結構簡單、魯棒性強和可靠性高等優點在工業控制領域被廣泛使用,但是對本文這類非線性時變系統,因無法按需自動調整參數值,使得導致普通PID控制對精密轉臺難以取得較好的控制效果.針對普通PID控制的問題,現有張虹等提出基于推導參數函數公式的非線性PID控制 ?[7] ;胡宏杰等提出將模糊控制與普通PID控制相結合的模糊自適應PID控制 ?[8] ;張新榮等提出論域可變的多論域模糊多參數自整定PID控制 ?[9] ;李航等提出基于改進的遺傳算法優化的BP神經網絡PID控制器 ?[10] .模糊PID控制是基于PID控制基礎上增加了模糊控制器環節.因此模糊PID控制需要進行額外的模糊控制器設計操作,包括基于經驗的模糊規則的編寫、輸入輸出模塊隸屬度函數的確定等,相比于普通PID控制,模糊PID控制有著操作設計上更為復雜且在運行時會相應的占用更多的計算機資源,對硬件要求比普通PID控制更高的弊端.但在控制特性方面,模糊PID控制通過將PID參數與模糊控制器解模糊后得到的精確值迭代實現PID參數實時調節,可以實時最優的對系統進行控制.對于本文這類非線性時變系統可以取得更好的控制效果,因此本文采用將模糊控制與普通PID控制相結合的自適應模糊PID控制算法,并使用仿真軟件校核模糊PID控制算法的控制特性.
本文首先在ADAMS軟件中搭建二維重載精密轉臺的動力學模型,然后將機械動力學模型導入到AMEsim軟件中,并與PMSM電機回路相連接,這樣AMESim與ADAMS將各自求解自己部分的模型,并通過軟件接口完成仿真信息的實時交互,再在AEMEsim軟件中創建接口元件,并將其作為控制元件添加入PMSM電機FOC控制回路中,最后使用Simulink軟件搭建PID與模糊PID控制回路,控制回路的輸出以及ADAMS與AMEsim的模型反饋信號通過接口元件實現信號實時交互,完成閉環反饋控制.基于最后的聯合仿真模型進行仿真分析,結果表明,模糊PID控制算法有著響應快、幾乎無超調,穩定誤差相比較普通PID控制減小了37%左右等優點.
2 二維重載精密轉臺
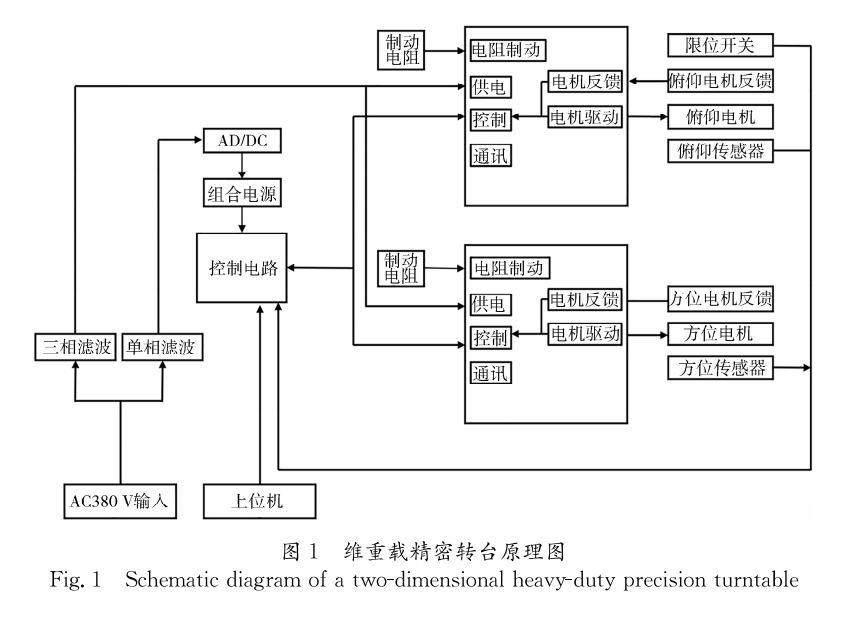
二維重載精密轉臺在航空航天、軍事工業等領域被廣泛使用.其基本功能用途通過接收來自上位機的控制命令,使得驅動方位與俯仰電機實現二維傳動座完成特定方位、俯仰旋轉運動,再通過方位、俯仰傳感器采集旋轉角度信息用于反饋控制.系統原理如圖1所示.二維重載精密轉臺具體系統結構如圖2和圖3所示.傳動原理示意圖如圖4和圖5所示.二維重載精密轉臺其他部分參數如表1所示.
其中,俯仰模擬負載質量為500 kg,俯仰、方位驅動電機均選用PMSM電機.傳動座轉動速度指標要求方位傳動座轉速誤差小于0.2 rev/min,俯仰傳動座轉速誤差小于0.1 rev/min.
3 多軟件聯合仿真模型搭建
3.1 基于amesim軟件電機系統建模
Amesim軟件采用以子模型來區別由不同底層算法構成的元件,其中子模型以一串字符來表示,每個功能元件子模型代號都具有唯一性.根據二維重載精密轉臺實際采用PMSM驅動電機,在amesim中搭建相應PMSM電機以及FOC磁場定向控制電路,PMSM電機有相應的子模型EMDPMSM01可以使用.PMSM電機FOC控制器則根據FOC控制原理選取元件搭建模型,選取子模型EMDPMSMTC01用于根據輸入的力矩指令值計算獲得相應 d 和 q 軸電流,選取子模型EMDPMSMCC01用于將電流調節目標值,使用子模型EMDDPT01和EMDDQ02P01實現坐標值由靜止坐標系到旋轉坐標系轉換,子模型EMDSDUP01,EMDSDI01,EMDSDUSP01完成線量、相位量變換,將所有選取部件按框圖連接得到電機回路整體模型,PMSM電機整體模型如圖6所示,相應參數取值如表2所示 ?[11] .
3.2 基于Adams軟件機械模型搭建
運用Adams軟件建立二維重載系統動力學模型,由于使用Adams軟件建立三維模型較為復雜,本文首先使用Solidworks軟件中搭建二維重載精密轉臺模型,模型原本的總零 件數多達兩千多個, ?直接導入到Adams軟件中會十分復雜,因此對模型進行一定簡化,考慮到如螺釘等細小零件、電機內部結構件、模型外殼、保護裝置以及與基座固定連接件等不影響傳動的部件對仿真結果影響較小,為減小計算量,選擇建立三維模型時忽略這部分零件,完成后將簡化后的模型導入Adams中,根據二維傳動系統工作傳動關系賦予模型相應的約束.二維重載精密轉臺Adams模型如圖7所示 ?[12] ?.各部件間賦予添加的約束關系如表3所示.
3.3 Simulink普通PID控制器模型搭建
我們使用Matlab軟件完成PID控制回路搭建, 通過試湊法獲得PID初始參數 P =0.41, I =011, D =0.003,普通PID控制器模型如圖8所示 ?[13] ?.
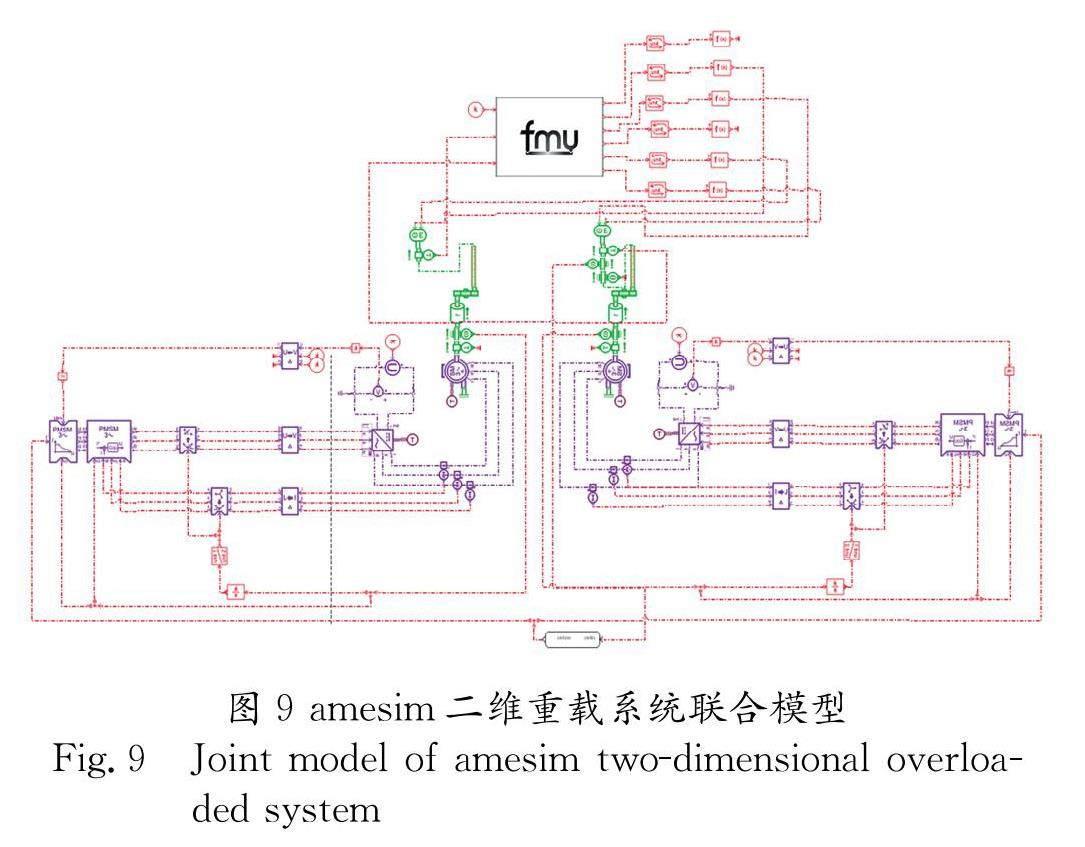
3.4 搭建機電一體化聯合仿真模型
我們將ADAMS模型導入到AMEsim軟件,并依據在ADAMS軟件設置的相應數據單元同PMSM電機控制電路相連接,創建接口元件用于同Simlink軟件實時交互仿真信息,最終機電一體化聯合模型如圖9所示.
4 模糊PID控制器
4.1 模糊PID控制器原理
普通PID控制原理方程為:
u(t)=R(t)-Y(t) ?(1)
P(t)= Κ ???P u t + Κ ???I ∫u(t) d t+ Κ ???D ??d u(t) ?d t ??(2)
式(1)中, R(t) 為輸入指令值; Y(t) 為反饋值.
輸入值為指令值與反饋值的差值,差值經比例、積分、微分三環節后再作用于執行機構,實現典型的PID反饋控制,普通PID有著結構簡單、可靠、穩定性好等優點.但對于時變非線性系統,普通PID因無法動態按需調整PID參數,難以取得較好控制效果 ?[14] .
模糊PID控制是基于普通PID原理,加入了模糊控制.模糊控制基本思想是將人的經驗通過一系列條件語句構成模糊規則,再利用模糊理論、模糊語言變量以及模糊推理將模糊規則轉換為數值計算,用于實現電腦程序模擬人進行系統控制.模糊PID控制原理如圖10所示.
相比較普通PID控制,模糊PID控制加入了模糊控制器環節,模糊控制器作為一個兩輸入三輸出模塊,其輸入語言變量為系統偏差信號以及偏差信號微分值,輸出語言變量為PID參數增量,它們的變化范圍即為基本論域值,通過確定模糊集語言變量以及隸屬度函數后,可將輸入值離散化處理成對應模糊語言值,然后根據基于經驗編輯的模糊規則對輸入值進行推理評估,得到模糊輸出量,最后選取適當解模糊方法用于將得到的模糊輸出集轉化為精確數字值,輸出結果為PID參數增量,即
K ??p = K ′ ?p +△ K ??p ??K ??i = K ′ ?i +△ K ??i ??K ??d = K ′ ?d +△ K ??d ????(3)
式中, ?K ??p 、 K ??i 、 K ??d ?指修改后的PID參數; ?K ′ ?p 、 K ′ ?i 、 K ′ ?d ?指設置的PID參數初值; △ K ??p 、△ K ??i 、△ K ??d ?值模糊控制器輸出的PID參數增量.因此,模糊PID通過調整參數增量值的大小可以實現PID參數實時動態調節 ?[15] .
4.2 搭建模糊控制器
使用MAtlab軟件完成模糊控制器設計,其中輸入 e 為差值信號以及 ec 為差值信號的微分值,輸出為PID參數的增益系數,本文均采用trimf三角形隸屬度函數,其中差值信號論域為{-5,5},差值微分信號論域為{-140,140}, FIS Type推理方式選擇Mamdani型,模糊集語言變量分為“負大(NB)”,“負大(NB)”,“負中(NM)”, “負小(NS)”,“零位(ZO)”,“正小(PS)”,“正中(PM)”,“正大(PB)”,隸屬度函數如圖11所示.
模糊控制器Defuzzification解模糊方法選擇重心法,函數表達式為
z ???o = ∑ ??n ??i=0 ?u ???c ( z ???i ) ?z ???i ?∑ ??n ??i=0 ?u ???c ( z ???i ) ??(4)
式中, ?z ??o ?即為模糊控制器輸出值; ?u ??c ( z ??i ) 為對應的隸屬度值; ?z ??i ?為控制量論域內的值 ?[16,17] .
4.3 模糊控制規則表設計
基于文獻[18],模糊參數 ?k ??p 、 k ??i 、 k ??d ?相應規則表選取如圖表4所示.相應規則表面圖如圖12所示.生成的模糊控制器結構圖如圖13所示.
e
5 仿真效果
5.1 普通PID控制效果
設置階躍函數幅值為5,階躍時間為0.5 s,可以得到方位傳動座轉速仿真效果如圖14所示.為提高控制器控制特性,考慮引入由模糊控制和PID控制相結合的自適應模糊PID控制.
5.2 搭建模糊PID控制器模型
使用Simulink軟件基于模糊PID原理圖搭建模糊PID控制回路,模型如圖15所示.
5.3 設置正交實驗方案
模糊控制器效果的好壞取決于模糊控制規則以及輸出參數論域的設置,對于增益參數 △ K ??p ?的論域設置1、2、3三個水平范圍{-0.06,0.06}、 {-0.082 ,0.082}、{-0.15,0.15},增益參數 △ K ??i ?的論域同樣分別設置為{-0.01,0.01}、{-0.022,0.022}、{-0.035,0.035},增益參數 △ K ??p ?的論域設置為{-0.000 3,0.000 3}、{-0.001 1,0.001 1}、{-0.001 9,0.001 9},完全實驗次數為27次,為了減少實驗次數,且因三參數間沒有相互影響,因此可以采用正交實驗法,實驗組數設置如表5所示.
5.4 模糊PID控制效果
輸入相同幅值設置為5,階躍時間為0.5 s的階躍函數,依據超調量、穩定誤差等重要指標編號4實驗組的控制特性更好,同普通PID仿真結果對比如圖16~圖18所示.
從仿真結果可以看出,相同階躍函數輸入下模糊PID階躍響應與普通PID控制相比0.56 s之前可以達到穩態,響應更加迅速且幾乎無超調,穩定誤差與普通PID控制相比減小37%左右,且符合方位傳動座轉速誤差小于0.2 rev/min的精度要求.因此,本文提出的模糊PID控制相比較下取得了更好的控制效果.
6 結 論
本文相比較傳統建模采用AMESim、Adams、Simulink軟件搭建二維重載精密轉臺機電一體化聯合仿真模型,提高模型的仿真精度,使用Simulink軟件中分別搭建普通PID和模糊PID控制兩種控制模型,通過輸入相同階躍函數.比較兩種控制模型階躍響應的異同,仿真結果表明,模糊PID控制在控制特性上比普通PID控制較好,為后續二維IOP Conference Series: Earth and Environmental Science重載精密轉臺相關研究的進展奠定了基礎.
參考文獻:
[1] ??Bhise ?A R, Desqi R G, Yerrawar M R N, ?et al . Comparison between passive and semi-active suspension system using matlab/simulink [J].Iosr J Mech Eivil En, 2016, 13:1.
[2] ?He F S, Ding N, Lu Y. The modeling and analysis of fuel metering system of gas turbine based on AMESim [J]. J Phys Conf Ser, 2022(1): 2383.[何豐碩, 丁寧, 路勇.基于AMESim的燃氣輪機燃油計量系統建模與分析[J].物理學雜志:會議系列, ?2022(1): 2383.]
[3] ?Fang P W, Ping W F, Jun X Y, ?et al . Simulation research on the driving stability of articulated vehicle based on ADAMS[J].IOP Conf Ser: Earth Environ. Sci, 2020, 587: 012035.[魏平芳, 楊曉軍, 李勇.基于ADAMS的鉸接式車輛行駛穩定性仿真研究[J].IOP會議系列: 地球與環境科學, 2020, 587: 012035.]
[4] ?Zhou Y, Liu K l, Li X C, ?et al . Combined simulation of excavator digging motion track control based on ADAMS and AMESim [J]. Mach Tool Hydraul, 2021, 49: 146.[周宇, 劉凱磊, 李興成, 等.基于ADAMS和AMESim的挖掘機挖掘運動軌跡控制聯合仿真[J].機床與液壓, 2021, 49: 146.]
[5] ?Li Q, Sha Y B, Zhao X Y, ?et al . Simulation analysis of iron roughnecks stretching device based on MATLAB and Adams [J]. J Phys Conf Ser, 2021(1), 1746.[李泉, 沙永柏, 趙曉影, 等.基于MATLAB和Adams的鐵粗頸拉伸裝置仿真分析[J].物理學雜志: 會議系列, 2021(1): 1746.]
[6] ?Ma Z G, Wu Y C. Influencing factors on dynamic characteristic analysis of Hydro-pneumatic suspension based on ADAMS/AMESim/Simulink [J]. Mach Hydraul, 2017, 45: 30.[馬志國, 吳耀春.基于ADAMS/AMESim/Simulink油氣懸架動態性能影響因素分析[J].機床與液壓, 2017, 45: 30.]
[7] ?Zhang H, Hu B .The application of nonlinear PID controller in generator excitation system [J].Energy Procedia, 2012(17), 202.[張虹, 胡波.非線性PID控制器在發電機勵磁系統中的應用[J].能源會議集, 2012(17): 202.]
[8] ?Hu H J, Zhang C, Wu Y, ?et al . A fuzzy adaptive PID control method for stabilized tracking system[J]. Appl Mech Mater, 2013, 2560: 282.[胡宏杰, 張超, 胡業, 等.一種穩定跟蹤系統的模糊自適應PID控制方法[J]. 應用力學與材料, 2013, 2560: 282.]
[9] ?Zhang X R, Kang L, Tang J P, ?et al . Trajectory tracking of intelligent excavator using variable universe fuzzy multi-parameter self-tuning PID control [J/OL]. China J Highw, 2023, 36: 240.[張新榮, 康龍, 唐家朋, 等.基于變論域模糊多參數自整定PID控制的智能挖掘機軌跡跟蹤[J].中國公路學報, ?2023, 36: 240.]
[10] ?Li H, Du F, Hu X B, ?et al . Research on improved BP neural network PID controller in gas concentration control [J]. J Sichuan Univ(Nat Sci Ed), 2020, 57: 1103.[李航, 杜璠, 胡曉兵, 等.改進的BP神經網絡PID控制器在氣體濃度控制中的研究[J].四川大學學報(自然科學版), 2020, 57: 1103.]
[11] Hao X H, Wei X L. Comparison between FOC and DTC on theory and simulation for PMSM [J]. Sci Technol Soc, 2008(13): 3463.[郝曉弘, 魏祥林.永磁同步電機FOC與DTC控制策略原理和仿真的比較[J].科學技術與工程, 2008(13): 3463.]
[12] Guo S, Hu X B, Zhang X J. Joint simulation of groove cutting robot based on Matlab and ADAMS [J]. Hoist Convey Mach, 2022(7): 37.[郭爽, 胡曉兵, 張雪健.基于Matlab與ADAMS的坡口切割機器人聯合仿真研究[J].起重運輸機械, 2022(7): 37.]
[13] Zhang X J, Hu X B, Jiang C J, ?et al . Kinematics analysis and Simulation of five axis groove cutting robot based on MATLAB [J]. J Sichuan Univ(Nat Sci Ed), 2021, 58: 063001.[張雪健, 胡曉兵, 蔣從軍, 等.基于MATLAB的五軸坡口切割機器人運動學分析與仿真[J].四川大學學報(自然科學版), 2021, 58: 063001.]
[14] Zhang J D, ?Tang R, ?Wei Y Q.Fuzzy adaptive PID control for parallel machine tool [J]. Appl Mech Mater, ?2013(273): 2202.
[15] Zhang S, ?Zhang Y, ?Zhang X, ??et al .Fuzzy PID control of a two-link flexible manipulator [J].J Vibroeng, 2016(1): 18.
[16] Huang L, Hu S K, Li Z F, ?et al . Design fuzzy controller based on normalized universe of discourse [J]. J Sichuan Univ(Nat Sci Ed), 2010, 47: 441.[黃麗, 胡世凱, 李中夫, 等.基于標準論域的模糊控制器設計[J].四川大學學報(自然科學版), 2010, 47: 441.]
[17] Xiao L B, Luo M K, Yuan Y. Fuzzy PID control based on behaviors [J]. J Sichuan Univ(Nat Sci Ed), 2011, 48: 27.[肖立波, 羅懋康, 袁勇.基于行為的模糊PID控制器[J].四川大學學報(自然科學版), 2011, 48: 27.]
[18] Yu C S, Yuan R B. Adaptive fuzzy PID control of electro-hydraulic position servo system based on AMESim-Simulink [J]. Agric Equip Veh Eng, 2022, 60: 158.[余長順, 袁銳波.基于AMESim-Simulink的電液位置伺服系統的自適應模糊PID控制[J].農業裝備與車輛工程, 2022, 60: 158.]
收稿日期: ?2023-02-20
基金項目: ??四川省科技計劃項目(2022YFG0072); 四川大學自貢市校地科技合作專項資金項(2021CDZG-9); 四川省科技計劃項目(2022YFG0075)
作者簡介: ??楊東明(1996-), 男, 四川成都人, 碩士研究生, 研究方向為機電液仿真.E-mail: 852408911@qq.com
通訊作者: ?胡曉兵.E-mail: huxb@scu.edu.cn
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
