基于傾斜測量技術的區域無人機航空應急測繪系統設計
2024-05-17 11:56:24林雙波
計算機測量與控制 2024年4期
林雙波
(內蒙古赤峰市不動產登記中心,內蒙古 赤峰 024000)
0 引言
測繪是對地面上已經存在的特征點和界線進行選擇,并利用測量手段獲得能夠反映地面現狀的圖形和位置信息的方法,其被用于工程建設、規劃設計和行政管理。應急測繪指的是為國家應對突發公共事件有效地提供地圖、基礎地理信息數據的服務[1-2]。災害發生后,由于現場通訊設備受損、通訊網絡中斷等原因,使得現場測量數據不能及時準確地傳輸,而利用無人機開展現場測量,可以突破測繪工作時空尺度的局限,為現場的搶險救災和應急管理提供有價值的數據支持。
文獻[3]中提出的基于三維激光掃描技術的應急測繪系統,利用三維激光掃描技術,獲取地質災害危險區域的三維坐標數據,為地質災害應急處置工作提供基礎保障。文獻[4]中提出的基于視頻幀與GIS系統匹配技術的應急測繪系統,通過提取視頻幀影像與GNSS/IMU數據實時同步,依據GNSS/IMU數據類型,實現幀影像糾正,具有較好的測繪效果。然而上述系統在實際運行過程中,存在測繪誤差大的問題。
針對上述問題,設計了基于傾斜測量技術的區域無人機航空應急測繪系統。無人機傾斜攝影技術主要利用無人機平臺搭載多個傳感器,實現攝影采集。傾斜攝影技術可以實現對地物的多視角精確觀測,在實際地形測量中可以得到理想的結果。將傾斜測量技術應用到區域無人機航空應急測繪系統的設計中,以期提升系統的應急測繪精度。
1 區域無人機航空應急測繪硬件系統設計
設計的區域無人機航空應急測繪系統以硬件執行環境作為主要集成結構,并為測繪功能的實現提供硬件支持。
1.1 傳感器與驅動器
系統中設計的傳感器主要用來監測無人機的實時運動數據,而驅動器為無人機飛行提供動力支持,同時實現對傾斜攝影元件的驅動。在無人機設備上安裝MEMS傳感器,傳感器中的核心運行元件是MPU9250九軸慣性測量單元,包括了3軸陀螺儀、3軸加速度計、3軸磁強計和數字運動處理單元,其內部工作電路結構如圖1所示。
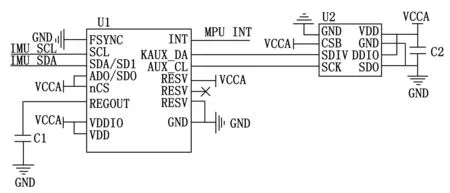
圖1 無人機傳感器內部工作電路圖
圖1所示的傳感器實現了對三軸的加速度、角速度和三軸的磁場信息的采集。這樣就可以確保同時讀取9個坐標系的坐標,同時讀取9個坐標系的坐標,從而達到最大程度的一致。MEMS傳感器具有I2C和SPI兩種接口,該I2C總線可以對外部的傳感器進行讀取。圖1中SDA、SCL這兩個引腳被用作數據線和時鐘線,因為無人機攜帶的裝置較多,同時也要考慮到無人機主板的體積,所以,可以通過I2C接口來與內部控制器進行通訊,從而可以降低線路的數量,減小主板的體積,同時還可以降低主控GPIO的占用率。除MEMS傳感器外,還裝設了MS5540C型號的數字大氣壓力傳感器,該設備能夠實現溫度補償和校正功能,對無人機的飛行環境氣壓進行實時監測,保證無人機的飛行安全。
無人機采用電機驅動方式,相應的驅動器設備由電子調速器和電機兩部分組成,其中電機選用的是無刷直流電機,能夠滿足無人機對電機的基本要求。而電子調速器能夠利用主控器輸出的PWM調制信號來控制電機的轉速,從而使電機閉環運行,并對電機施加了一個電子變相,達到了對無刷電機的保護。在設計系統中,在傳統驅動電路的基礎上加入一個穩壓二極管,電機在掉電或者停止運轉時,產生的反向電動勢會對電機造成沖擊,會對電機造成損傷,穩壓二極管起到保護電機的作用,消耗掉多余的反向電動勢,并通過MOS管來完成對驅動電流的放大。
1.2 無人機航空控制器
無人機中航空控制器的工作內容是控制無人機的飛行運動參數,保證無人機能夠精準地按照應急測繪路線航行[5]。設計系統選擇的航空控制器型號為STM32F4,其內部結構如圖2所示。

圖2 無人機航空控制器結構圖
選擇的航空控制器以Cortex-M4為內核結構框架,傳感器模塊是控制器主要連接的外部設備,需要用到I2C接口電路和外部終端,利用四路PWM波與驅動電機相連,用ADC來對實時供電的電池電量進行檢測,系統固件DEBUG端口,選用SWD接口來進行調試,系統是一款低功耗產品,因此必須對其進行低功耗的考慮和喚醒設計。
1.3 傾斜攝影元件
設計系統中應用了傾斜測量技術,為保證該技術的正常運行,需在硬件系統中安裝相應的傾斜攝影元件。在考慮分辨率、輻射特性、電子快門速度等性能的情況下,傾斜儀作為傾斜攝影元件,在實際應用過程中,由于無人機引擎振動可能會導致數據采集質量降低[6]。所以在傾斜攝影相機元件安裝過程中,在無人機與傾斜儀之間加裝穩定裝置,可以有效地改善無人機與傾斜儀間的振動。
1.4 無人機航空發動機
由于傳感器、控制器、傾斜攝影元件的加設,提高了無人機的機體重量,因此普通無人機常用的發動機已無法滿足無人機的航空飛行要求,因此需要對航空發動機進行調整。設計應急測繪系統中,采用排量更大的DLE120CC發動機[7],其組成結構如圖3所示。
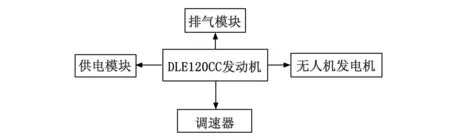
圖3 無人機航空發動機組成結構圖
將圖3所示的航空發電機與無人機傳感器與航空控制器相連,保證無人機控制終端能夠監測到實際的飛行狀態,并在低能量損耗情況下,及時調整發動機參數,避免出現空中熄火事件[8]。另外,由于無人機航空發動機排量的提升,能夠有效提高設備的抗風性,從而適應應急測繪項目的極端環境條件。
1.5 應急測繪項目的特殊設計
根據區域無人機航空應急測繪系統實際測繪區域的自然環境特征,對相關設備進行針對性調整。若測繪區域為高寒地區,則需要對傾斜攝影相機進行溫控處理,通過在傾斜儀外部設置溫度調節腔,并在該腔內設置隔熱和阻熱材料,減少傾斜儀與外部的熱交換,促進其內部的導熱,實現傾斜儀內部的熱均衡,并為傾斜儀的主動溫度控制提供有利的條件[9]。為了保證機載供電電池在較低的溫度條件下仍能工作,在電池上安裝了電加熱薄膜,并且通過溫控裝置對蓄電池的溫度進行控制。系統采用了一臺溫控器與一臺熱敏電阻器相結合的溫控裝置,實現了對電池的實時監控,并按照地面的命令對電池進行加溫或停溫。而當測繪區域氣壓過高時,可以在無人機外部添加一個保護套,保護套使用的材料密度需高于無人機本身材料,提高無人機的堅硬度。同理,針對不同的區域環境特征,對相關元件進行相應處理。
2 區域無人機航空應急測繪系統軟件功能設計
在硬件設備的支持下,設計系統的區域無人機航空應急測繪功能,測繪系統主要包括測量和繪制兩個步驟,具體的執行流程如圖4所示。
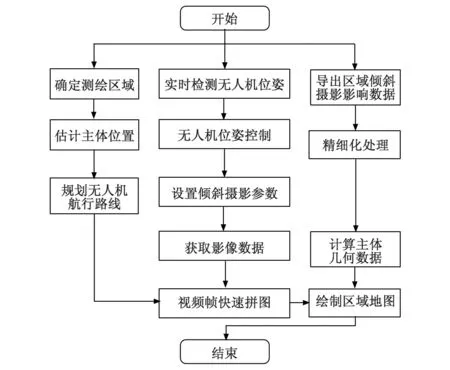
圖4 區域無人機航空應急測繪流程圖
在傾斜測量技術的支持下,利用無人機獲取測量數據,通過對區域位置信息的測算,得出區域內各個組成主體的數據測量結果,最終將其制成可視化圖像,得出區域測繪系統的輸出結果。為了滿足系統的應急測繪需求,需要盡量提高相關元件的運行速度。
2.1 規劃區域無人機航空飛行軌跡
2.1.1 計算無人機航空飛行高度
綜合考慮測繪區域空間分布、區域災害等情況,計算無人機的飛行高度范圍。首先利用式(1)計算無人機的航空攝像高度:
HAerial photography=f·A·σ
(1)
其中:f為無人機航攝的焦距值,A和σ分別為相機像元大小和地面分辨率。由于無人機在空中航攝的過程中受到了氣流等因素的影響,導致無人機不能一直維持著一條直線,從而造成了航向的扭曲,與此同時,航攝區域的地面地形也是凹凸不平的,這些因素都會對航攝相片的實際航向重疊度產生一定的影響[10]。為了確保后期相片立體量測和拼接的需求,需要計算無人機的飛行高度范圍,計算結果如下:
(2)
式中,σmin和σmax分別為采集航拍影像分辨率的最小值和最大值。
2.1.2 區域無人機航空飛行軌跡生成與更新
在應急測繪區域周圍選擇無人機的起降場,得出無人機的初始飛行位置,標記為(x0,y0),根據起降場與測繪目標區域之間的空間位置,確定無人機的初始飛行方向。假設區域內待測繪的主體數量為Nmain body,第i個主體的位置坐標為(xmi,ymi),則可以利用式(3)對無人機起降場和測繪主體之間的距離進行度量。
(3)
同理可以得出區域內所有主體與起降場之間的距離度量結果,并選擇距離最短的主體作為無人機的第一個測點,在已知該主體位置的情況下,生成對應飛行軌跡為:
(4)
在實際運行過程中,由于測繪主體位置坐標是系統的主要測繪內容,因此在航跡生成過程中輸入的主體位置信息均為預估信息。利用傳感器設備獲取無人機的實時航行位置,搜索與無人機當前位置最近的主體,利用式(4)生成相應的飛行軌跡,直到區域內所有主體均被遍歷為止[11]。在無人機的實際航空飛行過程中,需要利用內置的傳感器設備檢測初始生成的軌跡上是否存在障礙,若存在障礙,則需要重新生成飛行軌跡點,飛行軌跡點的更新結果為:
(5)
其中:(xi,yi)和(xi-hinder,yi-hinder)分別為存在障礙的初始軌跡點及其更新結果,δx和δy對應的是水平和豎直方向上的調整量[12]。最終將更新軌跡點添加到原飛行軌跡中,與前、后軌跡點相連,得出區域無人機航空飛行軌跡的更新結果。
2.2 利用傾斜測量技術獲取區域影像數據
利用無人機及其內置的傾斜儀設備,獲取應急測繪區域內的影像數據,傾斜測量影像數據的采集原理如圖5所示。

圖5 傾斜測量影像數據采集原理圖
在數據采集前,首先需要對無人機上的傾斜儀進行標定處理。將生成的航空飛行軌跡導入到無人機中,利用控制器設備,保證無人機能夠在指定的飛行高度上按照規劃軌跡飛行[13]。為了保證獲取的傾斜測量影像數據能夠滿足系統的應急測繪精度需求,需要對相機的曝光頻率進行設置,設置結果如下:
(6)
其中:υUAV和W分別為無人機的飛行速度和拍攝影像的有效航向幅寬,上述變量的計算公式為:
(7)
其中:ζ1和ζ2均為常量參數,rlocus為生成飛行軌跡半徑,κoverlapping為影像之間的有效重疊系數,b和H分別對應的是相機底片航向幅寬和相對飛行高度[14]。在無人機傾斜影像獲取過程中,采集參數滿足如下條件:
(8)
式中,θ和?分別為無人機機載傾斜儀的傾斜角度和可視角度,Lhorizontal-max和Lhorizontal-min對應的是無人機與生成多視傾斜影像中對應地物水平距離的最大值和最小值。同時啟動無人機飛行程序和影像采集程序,通過實時區域成像,得出初始影像的獲取結果。
2.3 初始區域影像預處理
2.3.1 影像勻光勻色
在無人機航空的影像數據采集過程中,由于拍攝角度不同,導致得到的影像數據可能存在光纖與色度不一致的情況,影像對測繪主體的識別與測量精度,因此需要對初始采集的影像數據進行勻光勻色處理[15]。影像的勻光勻色處理過程可以描述為:
IUniform light(x,y)=I(x,y)κmultiply+κadd
(9)
式中,I(x,y)為初始采集的影像數據,κmultiply和κadd分別為乘系數和加系數,參數κmultiply和κadd的求解公式為:
(10)
其中:κbrightness、κexpand分別為圖像的亮度系數和擴展系數,gtarget和gavg分別為灰度目標值和平均值,ξstandard和ξtarget分別為標準偏差和影像局部灰度偏差的目標值。將式(9)的計算結果代入式(8)中,即可得出區域傾斜測量影像的勻光勻色處理結果。
2.3.2 畸變校正
區域影像中可能存在畸變,可分為徑向畸變和切向畸變兩個部分,區域影像畸變的處理結果可以表示為:
(11)
其中:βx和βy分別為影像畸變校正參數在水平和豎直兩個方向上的分量,上述參數的具體取值可根據影像畸變量直接得出。利用式(10)對初始區域影像中的所有像素點進行校正,得出畸變校正處理結果。
2.4 計算測繪主體幾何數據
區域范圍內需要測繪的主體包括:房屋建筑、植被、道路、水體等,并根據不同主體的結構與紋理特征,設置各個測繪主體的標準特征向量,將其標記為ψi。那么在測繪主體幾何數據計算開始前,首先需要對傾斜影像中的主體進行識別并分割[16]。利用灰度共生矩陣提取區域傾斜影像的紋理特征,具體包括主對角線慣性矩、局部均勻性、灰度相關等,其中主對角線慣性矩和局部均勻性的提取結果可以表示為:
(12)
式中,i和j為影像中任意像素點及其相鄰節點的灰度值,k為灰度梯度等級,Pij為傾斜影像中每種(i,j)值出現的頻率。同理可以得出初始影像中所有紋理特征向量的提取結果。根據影像紋理之間的差異,對影像進行分割,設置圖像分割閾值為ζ,則影像分割結果可以表示為:
(13)
通過式(13)的處理,得到的Icut apart(x,y)為一幅二值圖像,相當于將源圖像用空間占有數組來進行表達。將提取的所有影像特征進行融合處理,得出影像的綜合特征提取結果,記為ψdraw。在此基礎上,將當前區域傾斜影像特征與設置的標準特征進行匹配,得出影像主體的識別結果:
(14)
將相關數據代入式(14)中,即可得出當前影像特征與主體i對應標準特征之間的匹配結果。若計算得出s(i)的值高于閾值s0(i),說明當前影像中對應主體為i,否則需要替換主體及其標準特征,直到滿足匹配要求位置[17]。以測繪的房屋建筑主體面積為例,該主體的幾何數據計算公式如下:
(15)
其中:ci和ui分別為第i個房屋建筑的長度和寬度,Nhouse為區域影像中包含的房屋建筑數量。而在植被幾何數據計算過程中,需要根據可見光植被指數,進一步確定植物類型。不同植物可見光植被指數的計算公式如下:
(16)
式中,λgreen、λred和λblue分別為區域傾斜影像中綠光、紅光、藍光的波段,基于此可以得出任意植被的幾何數據的計算結果。在實際的測繪主體幾何數據過程中,由于使用影像存在一定的拍攝角度,因此需要對主體幾何數據進行傾斜校正,校正處理過程為:
A′=φA×tanθ
(17)
由此得出系統中所有應急測繪主體幾何數據的精準計算結果。
2.5 實現區域無人機航空應急測繪
按照區域無人機航空傾斜測量結果,結合區域測繪主體幾何數據的求解結果,采用地圖制作的方式得出系統的應急測繪結果。在系統內新疆一個測繪工程,將傾斜測量數據導入索引文件中,經過實景建模與數據轉換后,在界面中對測繪主體地物進行編輯,實現對測繪主體的準確勾畫[18]。根據系統輸出應急測繪圖像大小與實際主體地物之間的尺寸關系,確定目標對象的實際測繪數值,該數值的求解結果為:
w′=w×τ×A′
(18)
其中:w和w′分別為區域主體地物的真實數據和測繪數據,τ為設置的比例尺。在完成一個主體地區的測繪后,計算其周圍主體與該主體之間的距離,通過比例尺的轉換確定具體測繪位置,重復上述操作得出下一主體的測繪結果[19-20]。最終將各個測繪主體進行組合,并利用硬件系統中的顯示器設備進行可視化輸出,完成系統的區域無人機航空應急測繪工作。
3 系統測試
為驗證設計的基于傾斜測量技術的區域無人機航空應急測繪系統的有效性,進行測試分析。在系統測試過程中,將系統硬件、軟件作為一個整體,采用白盒測試方式,在已知目標區域精準主體信息的情況下,判斷系統的測繪結果是否與實際位置信息一致,從而得出系統測繪精度的測試結果。為驗證設計系統在精度方面的優勢,設置文獻[3]系統和文獻[4]系統作為對比系統,且與設計系統在同樣的實驗環境中運行,從而確保實驗的準確性,通過具體指標的統計與對比,驗證設計系統的效果。
3.1 無人機選型與試飛檢查
為滿足系統的航空傾斜測量要求,適應研究區域的氣象條件,選擇Tello型號的四軸無人機作為飛行平臺,該無人機由云臺、圖傳設備等部分組成,無人機的外殼選用樹脂復合材料,機身采用鎂鋁合金,機臂為碳纖維材質,有效載荷1.39 kg,機身內置了衛星定位模塊。從無人機的飛行性能方面來看,無人機的平飛速度和垂直起降速度分別為10 m/s和4 m/s,最高飛行高度能夠達到600 m,最大荷載量為5 kg,具有良好的抗風性能,能夠在5級風環境下正常飛行。在正常飛行狀態下,無人機的續航能力能夠達到45 min左右。為保證選擇的無人機能夠在目標環境中正常運行,需要在實驗開始前對無人機進行試飛檢查。在起飛前,無人機需要進行俯仰、速度、遙控器等多個方面的測試,其中俯仰測試是為了確保陀螺儀的零點和俯仰角度都是正確的。在無人機模式中,當飛機的縱傾發生改變時,判斷縱傾發生改變。在進行空速檢測時,用手將空速表前面的空氣擋住,此時空速表上的數值為0,如果不是0,應重設0。用手指將空速管塞緊,稍微擠壓一下,空速指示器上的數值應該逐步增大,或維持不變,否則就會出現漏氣或堵塞的情況。接通遙控器,確認RC與RPV的控制方式轉換正確,檢測遠程控制的信道狀態。若覺得操縱量過大,則可由遙控器調整操縱桿的操縱桿行程。遠程控制,最大可達到20 m。關掉遙控,進入無人駕駛模式。此外,還要檢測無人駕駛飛機的振動狀況,也就是啟動引擎,觀測各種速度下的傳感器和操縱桿的振動狀況,尤其是地面上顯示的姿態參數。所有的彈跳都要控制在一個較小的幅度內,否則就需要改善緩沖裝置。
3.2 選擇應急測繪目標區域
為了保證實驗結果的可信度,系統測試實驗以多個研究區域作為測繪目標,且保證選擇的研究區域之間存在明顯的地形差異。此次實驗選擇的測繪目標可以分為林地、城市和山區3種類型,其中,林地研究區域選擇某人工實驗林場,區域面積為8 652 km2,與城市建筑相比,林地區域地形較為復雜,海拔范圍達到200~350 m,林地區域森林覆蓋率達到70%以上,種植的植被種類包括落葉松、云杉、油松等。城市選擇的是某市主城區,主城區內由公共建筑和居民建筑兩部分組成,城區總面積約為6 786 km2。而山區選擇的是某鐵礦礦山,其地貌特點是具有典型的低山丘陵地形,研究區域的土壤土層很薄,主要是裸巖、碎石和砂礫,以及大量的水體,區域面積為9 464 km2。在應急測繪系統運行前,首先確定測繪主體,并記錄各測繪主體的實際數據信息。其中,部分測繪主體的實際數據如表1所示。

表1 應急測繪目標區域部分主體真實數據表
除表1數據外,還需要標記各個主體中心點的位置坐標。由于大部分主體為不規則形狀,因此此次實驗未記錄主體長度和寬度,也未對長度、寬度數據進行效果測試。
3.3 設定傾斜測量技術運行參數
以配置的無人機平臺作為背景,設置傾斜測量影像的分辨率為2.0 ppi,航空比例尺為1∶100,航向與旁向重疊指數分別為80%和60%,傾斜儀間距為20 m,傾斜儀頻率為50 Hz,焦距為48 mm,傾斜儀測量結果以16∶9的格式輸出。
3.4 描述系統測試過程
采用各個研究地區的天地圖作為基礎底圖,使用GDAL、OSGEarth等開源軟件,實現對設計基于傾斜測量技術的區域無人機航空應急測繪系統的開發。在實驗過程中,將設定的傾斜測量技術運行參數輸入到無人機中,通過對目標區域的分析生成航行路線,傾斜影像數據的獲取結果。林地區域的傾斜影像如圖6所示。
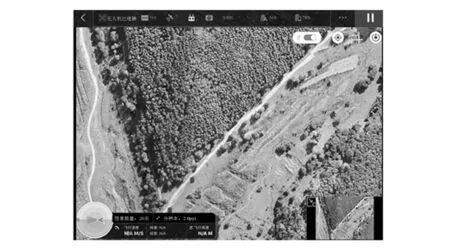
圖6 林地區域傾斜影像示意圖
在此基礎上,通過影像分析、幾何信息計算、地圖繪制等步驟,輸出系統的應急測繪結果,如圖7所示。
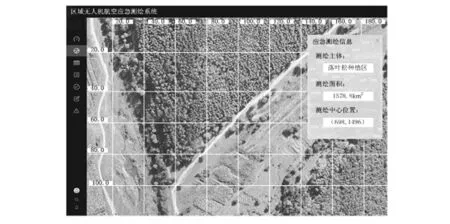
圖7 林地區域無人機航空應急測繪系統輸出結果
按照上述方式可以得出城市以及山區研究區域的應急測繪輸出結果。將設置的文獻[3]系統和文獻[4]系統對比系統分別標記為對比系統一和對比系統二,重復上述操作,實現對比系統的開發與運行,并得出相應的輸出結果。
3.5 設置系統測試指標
設置測繪范圍占比指標反映系統的應急測繪范圍,該指標的計算公式為:
(19)
式中,Aout和Atotal分別為輸出的應急測繪面積和研究區域的總面積。系統測繪精度的測試指標設置為主體面積測繪誤差和主體位置測繪誤差,其中,主體面積測繪誤差的計算公式為:
εA=Aout-Areality
(20)
其中:Aout為系統實際輸出的主體測繪面積,Areality為目標主體的實際面積。另外,主體位置測繪誤差的計算公式如下:
εp=(xout-xreality)+(yout-yreality)
(21)
式中,(xout,yout)和(xreality,yreality)分別為主體中心點的測繪位置坐標和實際位置坐標。最終計算得出測繪范圍占比越大,測繪誤差越小,說明系統的測繪功能與精度越優。
3.6 系統測試結果與分析
通過相關數據的統計,得出研究區域場景測繪范圍的測試結果,如表2所示。
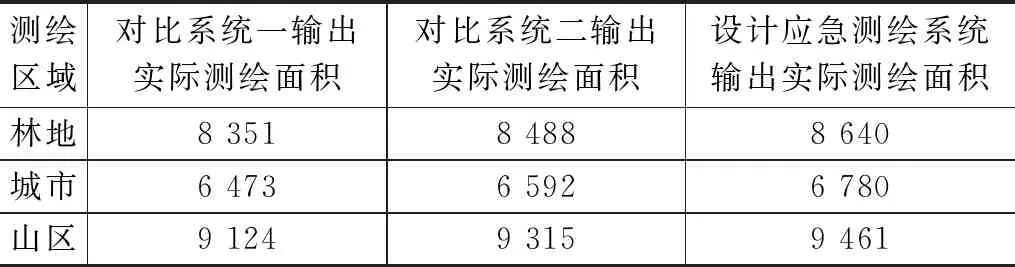
表2 系統測繪區域范圍測試數據表 km2
將表2中的數據代入式(19)中,計算得出3個系統的平均測繪范圍占比分別為0.961、0.979和0.999。另外,主體面積測繪誤差的測試結果如表3所示。

表3 區域主體面積測繪誤差測試數據表 km2
將表3中的數據和表1中的數據代入式(20)中,得出3個系統的平均主體面積測繪誤差分別為1.15、0.69和0.22 km2。統計測繪主體的位置信息數據,通過式(21)的計算得出系統位置測繪誤差的測試對比結果,如圖8所示。
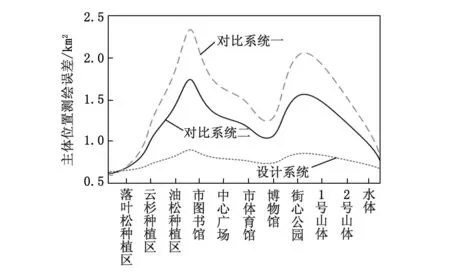
圖8 系統主體位置測繪誤差測試對比曲線
從圖8中可以直觀看出,設計系統的位置測繪誤差明顯低于兩個對比系統,由此證明設計系統具有更高的應急測繪精度。
4 結束語
無人機因其體積小、成本低、使用方便等優點,可廣泛用于基礎測繪、國土空間規劃、鐵路、公路及水利等諸多領域。在此次研究中,通過傾斜測量技術的應用解決了無人機在數據收集過程中存在的遮擋問題,進一步提高了區域無人機航空應急測繪精度,從而提升了應急測繪系統的應用價值。而在實際應用中,測繪區域場地通常是比較復雜和變化的,通過這種方式可以使作業順利開展,對數字測繪行業的長期發展具有重要意義。
猜你喜歡
南大法學(2021年3期)2021-08-13 09:22:32
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
自然與文化遺產研究(2016年2期)2016-05-17 05:53:59
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
