水利工程用液壓清淤泵模糊自抗擾控制方法設計
2024-05-17 11:56:34仇志峰
計算機測量與控制 2024年4期
關鍵詞:方法
仇志峰
(山東省調水工程運行維護中心,濟南 250013)
0 引言
液壓傳動技術依靠自身操作便捷、功率密度大以及傳動穩定等特性被人們廣泛應用于機械自動化技術領域中。其中,水利工程用液壓清淤泵作為核心系統的主要元件,在工作中起到重要作用,其性能可以關系到液壓系統是否能良好運行。但是在工作過程中,液壓清淤泵內部經常會出現大型的階躍負載擾動情況,因此針對液壓清淤泵工作過程中的階躍負載擾動問題,提出有效的模糊自抗擾控制就顯得尤為重要[1-2]。
羅俊林等人[3]基于液壓機械的高速度特性,提出了一種機械的自抗擾控制算法。該方法首先基于液壓機械結構建立液壓系統的數學模型,并根據液壓系統的轉速關系,確定液壓機械的前饋控制量,完成自抗擾控制器的設計;最后根據設計的控制器結合液壓系統模型實現對液壓機械的自抗擾控制。張越杰等人[4]首先對傳統自抗擾控制器展開缺陷分析優化設計自抗擾控制器,在系統模型未知的情況下引入不依賴模型信息設計機械的自抗擾控制器,結合伸縮因子確定控制器變論域;最后根據設計的自抗擾控制器實現對液壓機械的自抗擾控制。郭栶花等人[5]在變論域的自適應模糊控制時,引入分數階擴張觀測器以及跟蹤微分器;首先在機械模糊自抗擾控制中,采用分數跟蹤器將輸入信號轉化成能夠平滑跟蹤的差分信號,并使用擴張狀態觀測器獲取信號狀態估計值,實時獲取機械的動態模型以及外部擾動系數;最后基于上述獲取參數完成自抗擾控制器的設計,實現機械的模糊自抗擾控制。上述方法在開展液壓機械模糊自抗擾控制時,受液壓清淤泵液壓缸負載力平衡等因素的影響,導致控制效果差。
液壓清淤泵[6-7]是水利工程中常用的設備,其是一種利用液壓力傳動原理進行清淤作業的設備。其基本原理是利用液壓泵將液壓油送入液壓缸,推動活塞運動,從而帶動清淤器具進行清淤作業。液壓清淤泵的穩定運行對于水利工程的正常運行至關重要。為解決上述液壓機械模糊自抗擾控制過程中存在的問題,提出一種水利工程用液壓清淤泵模糊自抗擾控制方法。介紹了液壓清淤泵自抗擾控制的結構原理和動力學計算方法,并以水利工程用液壓清淤泵為例,提出了模糊自抗擾控制方案,并進行了仿真測試。具體來說,在動力學計算方面,分析液壓清淤泵的伺服閥和液壓缸的動力學特性,確定伺服閥和液壓缸的參數,以保證系統的控制效果和穩定性。在模糊自抗擾控制方案中,需要確定負載流量跟蹤微分器、液壓缸進出口擴張狀態觀測器和壓缸的平衡負載狀態誤差反饋控制器設計工程,并制定模糊規則,以實現對液壓清淤泵的自適應控制。通過仿真測試對液壓清淤泵的模糊自抗擾控制方案進行驗證,并對結果進行了分析和總結。結果表明,所提出的液壓清淤泵模糊自抗擾控制方案可以為水利工程中液壓清淤泵的控制提供參考,并有望進一步提高水利工程的效率和安全性。
1 液壓清淤泵自抗擾控制結構原理
由于液壓清淤泵在工作過程中極易出現階躍負載擾動情況,從而造成液壓清淤泵出現負載擾動故障影響液壓清淤泵的安全運行,所以在實施液壓清淤泵自抗擾控制前,需要根據液壓清淤泵結構模型獲取液壓清淤泵核心部件結構特點,確定液壓清淤泵自抗擾控制過程中相關影響因素。液壓清淤泵具體結構如圖1所示。

圖1 液壓清淤泵結構圖
分析圖1可知,液壓清淤泵由排氣塞、復位彈簧、控制器、吸泥口、排放口、液壓缸、伺服閥以及變量活塞、軸承殼等部件組合構成的。在工作過程中,控制器通過對液壓泵和液壓缸的控制,實現對清淤器具的運動控制和位置調節。具體來說,液壓泵將液壓油從油箱中吸入,經過濾芯過濾后,通過伺服閥調節流量和壓力,送入液壓缸內。液壓缸內的活塞受到液壓油的推力,向外運動,帶動清淤器具進行清淤作業。當液壓泵停止工作時,液壓缸內的活塞會受到彈簧或重物的作用,返回初始位置。
2 液壓清淤泵動力學計算
基于上述液壓清淤泵結構可知,液壓清淤泵[8]運行過程中液壓缸和伺服閥是整個液壓清淤泵液壓系統的核心。因此在開展液壓清淤泵自抗擾控制前,需要針對伺服閥和液壓缸開展動力學計算,獲取相關動力學方程從而確定液壓清淤泵自抗擾控制過程中的影響因素。
2.1 伺服閥動力學計算
由于液壓清淤泵工作時,伺服閥的閥芯會根據壓力出現位移現象,所以壓力能夠直接決定液壓清淤泵滑閥吸泥口以及排放口的功率性能。因此,設定pd為液壓缸的大桿腔體流量,px為小桿腔體流量,以此獲取伺服閥在泵體運動時的負載流量,過程如下式所示:
pL=(ipx+pd)/1+i2
(1)
式中,i為液壓清淤泵液壓缸內部腔體的流量面積比,pL為泵體負載流量[9-10]。基于上述計算結果可知,計算出的泵體負載流量與實際結果之間存在誤差,所以需要將伺服閥的負載權值w引入其中,重新計算泵體的負載流量值,結果如下式所示:
(2)
式中,Ad為伺服閥泄露向量,xv為閥芯位移速度,qα為實際負載值,β為腔體流量密度。
設定Bp為伺服閥的流量增益,以此獲取伺服閥的線性方程:
(3)
式中,χ為伺服閥的線性方程,Bc為壓力增益系數,Δxv為絕對位移速度。由此,確定伺服閥的負載值與壓力值之間的動態關系方程,過程如下式所示:
FL=χ(Cd-Cx)
(4)
FL為伺服閥的負載值與壓力值之間動態關系方程,Cd與Cx為大、小腔體對應的腔體面積。
2.2 液壓缸動力學計算
1)液壓缸流入流出動力計算。液壓清淤泵中,由于液壓缸連接管道存在對稱性,因此將液壓缸內部電壓以及彈性模量設定為常數,液壓清淤泵在階躍負載擾動[11]下液壓缸流入、流出的動力與功率相關,其為連續方程,過程如下式所示:
(5)
式中,δ為液壓缸流動動力,δlr為液壓缸流入動力,δlr為液壓缸流出動力,C1為液壓缸的吸泥口面積,C2為排放口面積,xq為位移系數,Aiq為內泄漏系數,Aeq為外泄漏系數,Z1為吸泥口容積,Z2為排放口容積,εe為腔體的體積彈性模量,V為液壓缸內部電壓。
2)液壓缸負載力平衡狀態計算。液壓清淤泵中,液壓動力元件[12]功率動態特性與液壓清淤泵負載值相關。設定液壓清淤泵在階躍擾動下的負載彈性模量為Eq,粘性摩擦系數為Dq,以此獲取液壓清淤泵內液壓缸輸出力與負載力之間的平衡狀態值,過程如下式所示:
(6)
式中,nt為液壓缸質量,K為液壓缸輸出力與負載力之間的平衡狀態值。
綜合上述分析,獲取水利工程用液壓清淤泵自抗擾控制影響因素集合λ:
λ=FL∪δ∪K
基于上述分析結果可知,在階躍擾動狀態下液壓清淤泵開展自抗擾控制過程中,液壓清淤泵內部伺服閥負載流量、液壓缸進出口狀態以及液壓缸的平衡負載狀態出現波動都會影響后期的自抗擾功率控制結果。綜合分析上述指標的復雜性和變化性,有助于提高模糊自抗擾控制的控制精度、適應性和安全性。
3 水利工程用液壓清淤泵模糊自抗擾控制
根據上述液壓清淤泵運動狀態分析結構,借鑒模糊控制原理,對液壓清淤泵的非線性誤差反饋系數完成在線整定,通過擴張狀態觀測器對液壓清淤泵運行下階躍負載擾動展開實時觀測,結合前饋控制器對閥芯實施控制,從而有效降低液壓清淤泵工作時階躍負載擾動帶來的影響,實現水利工程用液壓清淤泵模糊自抗擾控制。
3.1 確定模糊自抗擾控制流程
基于上述分析結果可知,水利工程用液壓清淤泵模糊自抗擾控制實質上就是液壓泵工作過程中遭受轉速擾動以及階躍負載擾動時,通過前饋補償控制器[13-14]對液壓泵變量伺服機構內部斜盤擺角的大小實施補償控制,從而降低轉速擾動以及階躍負載擾動對液壓泵的影響,最終實現液壓泵的穩速輸出控制。具體控制流程如圖2所示。

圖2 液壓清淤泵模糊自抗擾控制流程
基于上述模糊自抗擾控制流程可知,對于液壓清淤泵來說,當液壓清淤泵處于工作狀態時,伺服閥的控缸環節的諧振頻率遠高于馬達控制環節的諧振頻率,因此結合水利工程用液壓清淤泵自抗擾控制影響因素集合λ,確定液壓清淤泵定量馬達轉速與輸入變量之間的傳遞函數,過程如下式所示:
F(s)=φm(s)/I(λ)
(7)
式中,F(s)為建立的傳遞函數,φm(s)為液壓清淤泵定量馬達轉速,I(λ)為輸入的變量。
3.2 液壓清淤泵模糊自抗擾控制
由上文可知,式(7)的輸入變量I(λ)與2.2節中得到的負載流量、液壓缸進出口狀態以及液壓缸的平衡負載狀態相關,因此,在清淤泵模糊自抗擾控制過程中,分別對3個影響因素進行控制。
1)負載流量跟蹤微分器設計:為成功獲取液壓清淤泵馬達負載流量的期望微分信號,降低液壓清淤泵超調和響應速度之間的矛盾,需要采用跟蹤微分器[15-16]對負載流量控制流程實施安排過渡。
設定u為液壓清淤泵負載流量控制量增益,y01為被跟蹤信號,ni為期望轉速信號,以此獲取跟蹤微分器最佳控制函數,過程如下式所示:
(8)
式中,fbest為最佳控制函數,a、d為中間變量,sign(a)為符號函數。基于建立的最佳控制函數,將跟蹤微分器輸入向量設定成o(k),構建二階的負載流量跟蹤微分器,過程如下式所示:
(9)

2)液壓缸進出口擴張狀態觀測器設計:液壓清淤泵模糊自抗擾控制時,需要利用擴張狀態觀測器將液壓缸吸水和排水狀態過程轉換成積分串聯類型,完成整個階躍負載總擾動的估計。
設定誤差信號為φ,觀測器擴張狀態變量設定成y1、y2、y3[17],總擾動記作yz,觀測器控制增益設定成[γ1,γ2,γ3,γ4],以此完成擴張狀態觀測器的建立,過程如下式所示:
(10)
式中,ι為輸入信號增益系數[18],η為擴張狀態觀測器的輸入信號。
3)壓缸的平衡負載狀態誤差反饋控制器設計:在開展液壓清淤泵模糊自抗擾控制時,為避免液壓清淤泵液壓缸的平衡負載控制過程出現高頻的震顫現象,所以需要設定自抗擾控制過程的連續函數為g(θ,κ,ρ)且接近原點狀態,并保證該函數具備線性段的連續冪次函數關系,從而完成液壓清淤泵中液壓缸的平衡負載狀態非線性的誤差反饋控制器[19]的設計,結果如下式所示:
(11)
式中,κ為非線性因子,ρ為線段區域長度,Δθ為觀測信號的二階微分差,R為誤差反饋控制量,H為設計的誤差反饋控制器。
3.3 制定模糊規則
基于上述建立的控制器以及狀態觀測器,將模糊控制理論與自抗擾控制結合實現模糊控制。即:
I(λ)′=W∪G∪H
(12)
I(λ)′為對負載流量、液壓缸進出口狀態以及液壓缸的平衡負載狀態控制之后的結果。
將調整誤差為0作為控制目標,根據模糊規則[20-21]對I(λ)′內部加權系數實施整定,從而有效提升液壓清淤泵的自抗擾能力。制定的模糊規則μ如下式所示:
(13)
將式(13)的模糊規則總結如表1所示。
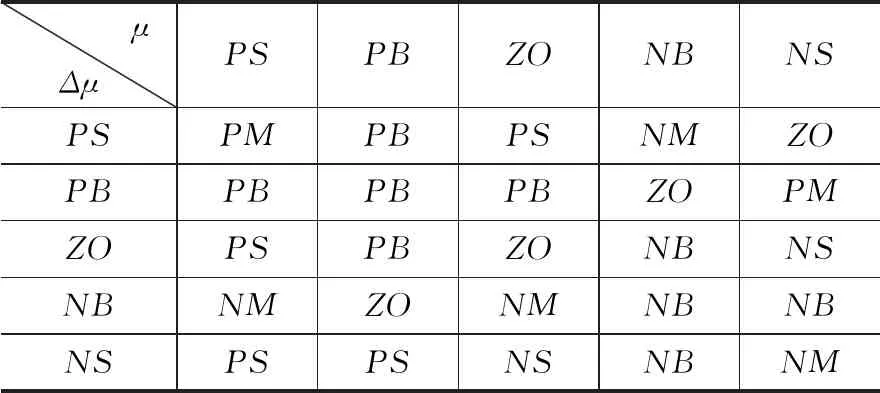
表1 模糊控制規則表
表1中,{高,中,零,低,高}分別記為{PS,PB,ZO,NB,NS}。當μ取值較大時,需要增加量化因子,降低基本論域取值,增強控制強度,有效消除誤差,增加比例因子的取值,確保系統的穩定性。當μ偏差取值較小時,系統逐漸接近穩定的狀態,此時需要降低量化因子的取值,增加基本論域,減少控制強度,同時減少比例因子以避免超調,適當增加量化因子,確保控制靈敏度和穩態精度。

F(s)′=μ(φm(s)/I(λ)′)
(14)
F(s)′即為進行模糊規則后的傳遞系數。
將F(s)′按照上述制定的模糊控制原理對液壓清淤泵自抗擾控制中的非線性誤差反饋系數實施在線整定,通過擴張狀態觀測器對液壓清淤泵運行下階躍負載擾動展開實時觀測,估計液壓清淤泵總干擾值,結合前饋控制器對閥芯實施控制。從而實現對液壓清淤泵斜盤擺角的補償,完成液壓清淤泵模糊自抗擾控制。
4 仿真測試
分別采用階躍負載擾動下的水利工程用液壓清淤泵模糊自抗擾控制(所提方法)、液壓機械無級變速器速比自抗擾控制研究(文獻[3]方法)、變論域自適應模糊分數階自抗擾控制器設計(文獻[5]方法)測試。
4.1 仿真設置
4.1.1 液壓清淤泵仿真設置
測試過程中,根據AMESim軟件與Matlab仿真軟件結合,構建虛擬水利工程用液壓清淤泵,如圖3所示。
圖3 水利工程用液壓清淤泵虛擬圖
具體液壓清淤泵內部參數如表2所示。
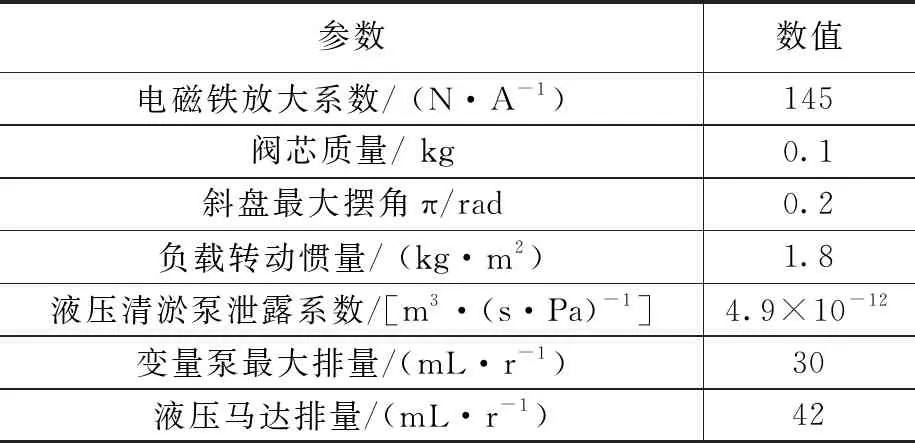
表2 液壓清淤泵內部參數
4.1.2 控制器參數設置
結合前文的理論研究可知,本文設計的水利工程用液壓清淤泵模糊自抗擾控制方法包括負載流量跟蹤微分器、液壓缸進出口擴張狀態觀測器、壓缸的平衡負載狀態誤差反饋控制器3方面,結合液壓清淤泵運行實際,3個控制器的參數設置如表3所示。
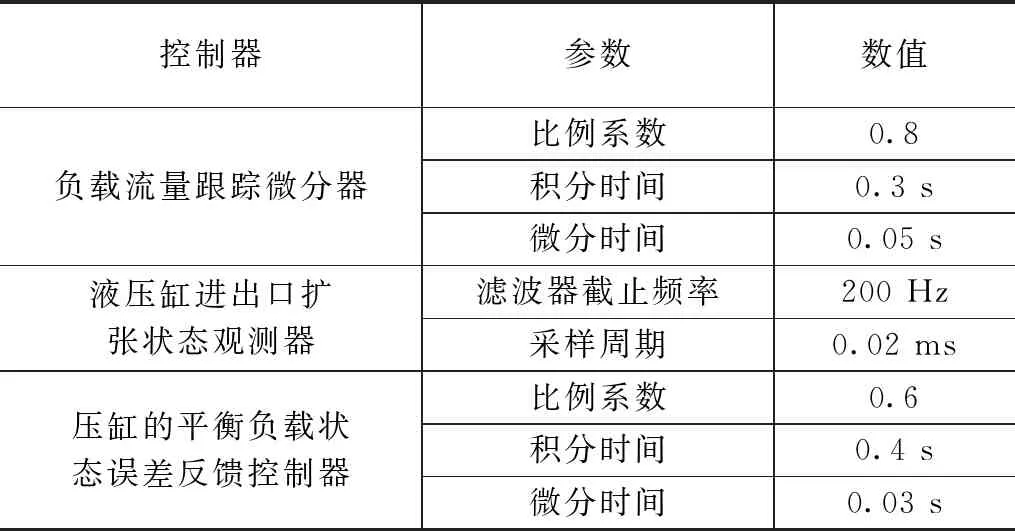
表3 控制器參數設置
4.2 仿真流程
根據上述參數設定,確定液壓清淤泵模糊自抗擾控制仿真流程如下:
1)設備準備:按照4.1部分準備液壓清淤泵、控制器等設備,并進行安裝和調試,確保設備運行穩定。
2)系統建模和參數識別:對液壓清淤泵進行建模,并進行參數識別,確定系統的數學模型和控制參數。
(1)確定液壓清淤泵的結構:根據圖1確定液壓清淤泵的結構包括液壓泵、液壓缸、閥門等組成部分。
對于多筒型基礎(如圖9所示),天津大學等研究發現下沉調平時筒體之間的相互約束以及調平后筒裙周圍土體與筒體之間的邊界條件變化(如圖中調平后筒土間裂縫、土壓力分布等)同時影響著下沉安全和可調深度及角度。更大功率風電風機需求的大尺度筒型基礎,直徑和筒壁厚度之比勢必增加。薄壁結構和克服下沉阻力需要的吸力組合必將增加結構變形甚至屈曲的施工風險。
(2)建立液壓清淤泵模擬圖:根據液壓清淤泵的結構和運動規律,利用AMESim軟件與Matlab仿真軟件生成圖2所示的水利工程用液壓清淤泵虛擬圖。
(3)參數識別:確定如表1所示的液壓清淤泵電磁鐵放大系數、閥芯質量、斜盤最大擺角、負載轉動慣量、液壓清淤泵泄露系數、變量泵最大排量、液壓馬達排量參數。
(4)確定控制器參數:根據建立的液壓清淤泵模擬圖和參數識別結果,確定如表3所示的模糊自抗擾控制器的控制參數。
3)確定控制策略:根據所提方法、文獻[3]方法以及文獻[5]方法實現過程確定控制策略。
4)數據采集:通過傳感器對液壓泵的狀態進行實時監測和數據采集,包括負載擾動、電壓、含淤值、吸水量等參數。
5)結果分析:根據步驟4)獲取的數據,對結果進行分析和評估。
4.3 仿真結果及分析
基于上述建立的虛擬液壓清淤泵,利用所提方法、文獻[3]方法以及文獻[5]方法開展模糊自抗擾控制,從負載擾動值估計結果、液壓清淤泵響應速度、液壓清淤泵清淤效果、液壓清淤泵容積效率、液壓清淤泵運行穩定性和作業任務控制次數6個方面測試不同方法在液壓清淤泵模糊自抗擾控制過程中的實際控制效果。
1)負載擾動值估計測試:負載擾動值是指在液壓清淤泵運行過程中,由于負載的變化或外部擾動等原因所產生的負載擾動信號的大小。液壓清淤泵的負載擾動值是影響控制精度和穩定性的重要因素之一,因此,采用所提方法、文獻[3]方法以及文獻[5]方法開展模糊自抗擾控制后,對不同方法在自抗擾控制時估計的總擾動值展開測試,測試結果如圖4所示。
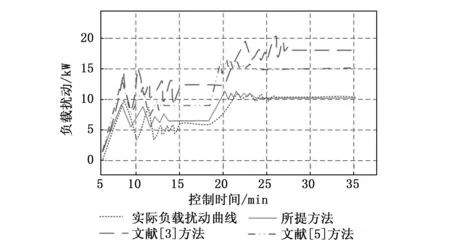
圖4 不同方法負載擾動估計測試結果
2)液壓清淤泵響應速度對比:液壓清淤泵的響應速度是指在電壓輸入變化時,液壓清淤泵輸出流量或壓力等參數的變化速度。響應速度是衡量液壓清淤泵性能的重要指標之一。當液壓清淤泵通過電能運行,所以,液壓清淤泵工作時,電壓會有顯著波動。因此通過分析液壓清淤泵的電壓變化可以直觀看出液壓清淤泵的響應速度,分別對所提方法、文獻[3]方法、文獻[4]方法下液壓清淤泵的電壓幅值進行記錄,結果如圖5所示。
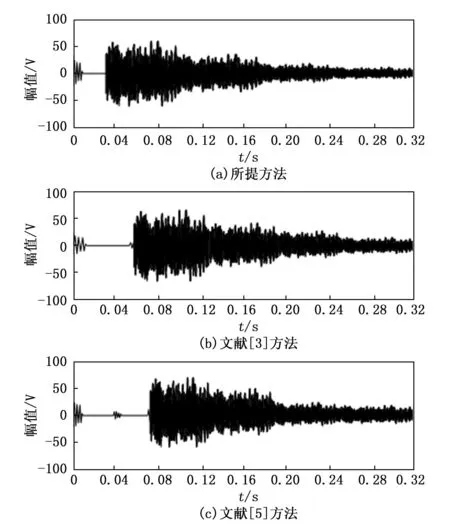
圖5 不同方法液壓清淤泵的電壓變化
通過圖5可知,運用所提方法,液壓清淤泵在0.03 s時開始響應,且幅值波動幅度較小,在0.18 s時幅值波動趨于穩定;文獻[3]方法在0.05 s時開始響應,在0.25 s時幅值波動趨于穩定;文獻[5]方法在0.07 s開始響應,0.20 s時幅值波動趨于穩定。表明所提方法液壓清淤泵的響應速度較快。
3)液壓清淤泵清淤效果:液壓清淤泵常用于清除河道、湖泊等水域中的淤泥和雜草。液壓清淤泵的清淤效果可以通過測量含淤值來評估。含淤值是指單位面積內淤泥的體積或重量。液壓清淤泵的清淤效果可以通過測量清淤前后的含淤值變化來評估,含淤值量越小,說明清淤效果越好。采用所提方法、文獻[3]方法以及文獻[5]方法開展模糊自抗擾控制后,對不同方法控制后的液壓清淤泵清淤效果展開測試,測試結果如表4所示。

表4 不同方法的清淤效果測試結果
分析表4可知,在開展液壓清淤泵模糊自抗擾控制時,隨著控制時間的不斷增加,不同方法測試出的液壓清淤泵含淤值逐漸增加。60~90 min之間,所提方法的含淤量為0.012 L/min;文獻[3]方法的含淤量為0.024 L/min;文獻[5]方法的含淤量為0.047 L/min。其中,所提方法測試出的液壓清淤泵含淤量較少,可以有效提高清淤效果。
4)液壓清淤泵容積效率測試:液壓清淤泵容積效率是指液壓清淤泵輸出流量與泵排量之比,通常以百分比表示。容積效率是衡量液壓泵工作效率和穩定性等性能的重要指標之一,為此,采用所提方法、文獻[3]方法以及文獻[5]方法開展模糊自抗擾控制后,對不同方法的液壓清淤泵容積效率展開測試,測試結果如圖6所示。

圖6 不同方法液壓清淤泵容積效率測試結果
分析圖6可知,在運行液壓清淤泵模糊自抗擾控制時,隨著控制時間的不斷增加,在不同的時間段中,3種方法測試出的液壓清淤泵容積效率各不相同。初始時,所提方法和文獻[3]方法均保持100%容積效率,文獻[5]方法容積效率開始降低為99.5%;隨著時間繼續增加,3種方法的液壓清淤泵容積效率均有下降;時間持續到120~150 min時,所提方法容積效率最高為98.73%,因此所提方法的液壓清淤泵容積效率較優。
5)液壓清淤泵運行穩定性測試:液壓清淤泵的運行穩定性是指在工作過程中,液壓清淤泵輸出流量和壓力等參數的穩定性。液壓清淤泵的穩定性對于水利工程的正常運行至關重要,特別是在吸水量較大的情況下,需要保證液壓泵的穩定性和可靠性。液壓清淤泵運行穩定時,吸水量隨著時間的增長穩定上升;運行不穩定時,會出現過量吸水或者吸水異常現象。因此,通過分析液壓清淤泵的吸水量變化來判斷清淤泵在不同方法下的運行情況,如圖7所示。
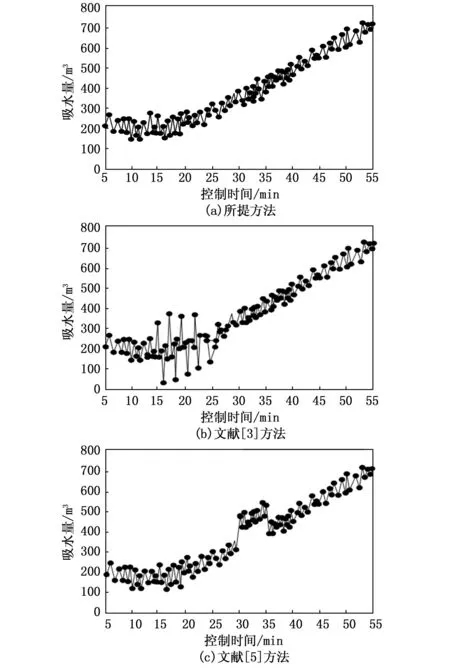
圖7 不同方法下液壓清淤泵的運行穩定性
分析圖7可知,運用所提方法液壓清淤泵的吸水量隨著時間的增加而增加,且增加幅度較為穩定;在文獻[3]方法下,清淤泵的吸水量變化幅度較大;在文獻[5]方法下,清淤泵的吸水量有吸水異常現象。表明運用所提方法對液壓清淤泵進行控制,運行較為穩定。
6)作業任務控制次數測試:液壓清淤泵的作業任務控制次數是指在清淤作業中,控制器對液壓泵和液壓缸的控制次數。控制次數越少,表明液壓清淤泵運行更穩定。表5為3種方法對清淤作業任務的控制次數結果。

表5 3種方法對清淤作業任務的控制次數
分析表5可知,運用所提方法對清淤作業任務的控制次數少于文獻[3]方法和文獻[5]方法,最大控制次數為3次。文獻[3]方法對清淤作業任務的控制次數在任務7時達到最大,為6次,文獻[5]方法對清淤作業任務的控制次數在任務11時達到最大,為6次;綜上可知,所提方法通過選擇合適的控制器,以適應不同的清淤場景和淤泥性質的同時,分析了液壓清淤泵的負載和擾動,并采取相應的控制策略進行補償和抑制,減少了控制次數,保證了液壓清淤泵的穩定運行。
通過以上6組測試可知,所提方法完成水利工程用液壓清淤泵模糊自抗擾控制時,該控制方法能夠精準地測試出綜合負載擾動值,且控制效果較好。
5 結束語
隨著液壓清淤泵適用范圍的不斷增加,對水利工程用液壓清淤泵實施模糊自抗擾控制就顯得尤為重要。為此,提出階躍負載擾動下的水利工程用液壓清淤泵模糊自抗擾控制。該方法基于自抗擾控制時相關影響因素分析結果,確定自抗擾控制流程,并設計與之相應的觀測器、補償控制器,從而實現對液壓清淤泵的自抗擾控制。并通過建立虛擬液壓清淤泵,從負載擾動值估計結果、液壓清淤泵含淤量效果以及液壓清淤泵容積效率等5個方面測試不同方法在液壓清淤泵模糊自抗擾控制過程中的實際控制效果。對比證明所提方法能夠精準地測試出綜合負載擾動值,且控制效果較好,為該方向的研究提供一定的理論價值。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
