GPS/SINS/偏振光組合導(dǎo)航的模糊控制算法研究
2024-05-17 12:22:52任彩鳴邊宇峰李怡綱張朝鋒
計(jì)算機(jī)測量與控制 2024年4期
任彩鳴,李 沅,邊宇峰,李怡綱,張朝鋒
(1.中北大學(xué) 電子測試技術(shù)國家重點(diǎn)實(shí)驗(yàn)室,太原 030051;2.晉中云時(shí)代技術(shù)有限公司,山西 晉中 030600)
0 引言
隨著科技文明的進(jìn)步和人類活動(dòng)范圍的擴(kuò)大,從飛機(jī)、火箭、衛(wèi)星到汽車、船舶、潛艇等不同的載體,它們都依賴于精準(zhǔn)的導(dǎo)航算法來確定位置、確定航向和規(guī)劃路徑。
導(dǎo)航工具的出現(xiàn)和持續(xù)發(fā)展使得人們能夠更加準(zhǔn)確地定位自身位置,并且能夠在復(fù)雜的環(huán)境中找到最優(yōu)的路徑。這對于交通運(yùn)輸、軍事作戰(zhàn)、資源勘探、災(zāi)害救援等各個(gè)領(lǐng)域都至關(guān)重要。隨著導(dǎo)航技術(shù)的發(fā)展,導(dǎo)航工具的算法也在不斷完善。在使用導(dǎo)航工具時(shí),每種工具都有其獨(dú)特的優(yōu)勢和劣勢,SINS能夠在短期內(nèi)獨(dú)立自主地提供精確的位置、速度和姿態(tài)角信息[1],但誤差會(huì)隨時(shí)間積累[2-3]、GPS可在全球范圍內(nèi)獲取絕對的位置信息[4-5]但在復(fù)雜地形時(shí)信號(hào)易受到遮擋[6-7]。太陽光與大氣散射形成的偏振光是地球大氣空間的自然屬性,利用大氣偏振模式的特性實(shí)現(xiàn)偏振光導(dǎo)航[8]。偏振光導(dǎo)航具有抗干擾和誤差不隨時(shí)間累積的優(yōu)點(diǎn)[9],缺點(diǎn)是提供的導(dǎo)航信息相對較少[10]。
組合導(dǎo)航是一種基于多種導(dǎo)航傳感器協(xié)同工作的導(dǎo)航方式,通過融合多種傳感器的信息,可以提高位置和姿態(tài)估計(jì)的精度和魯棒性。組合導(dǎo)航在軍事、民航、航空航天等領(lǐng)域得到了廣泛應(yīng)用,成為現(xiàn)代導(dǎo)航技術(shù)的重要組成部分。使用組合導(dǎo)航能夠充分利用單一導(dǎo)航工具的優(yōu)勢,提高導(dǎo)航系統(tǒng)的性能和實(shí)用性。然而,組合導(dǎo)航中涉及的多種傳感器的測量誤差、不確定性和噪聲等因素,往往會(huì)影響導(dǎo)航估計(jì)的精度和可靠性。因此,如何對傳感器數(shù)據(jù)進(jìn)行有效地融合和處理,成為組合導(dǎo)航中亟待解決的問題和研究熱點(diǎn)。組合導(dǎo)航中常用的信息融合方法就是卡爾曼濾波[11],卡爾曼濾波器是動(dòng)態(tài)過程模型和相關(guān)最優(yōu)估計(jì)方法發(fā)展的巔峰。傳統(tǒng)的卡爾曼濾波方法依賴于線性模型和高斯噪聲假設(shè),在非線性系統(tǒng)和非高斯噪聲條件下效果不佳。在實(shí)際應(yīng)用中,卡爾曼濾波的有效性可能會(huì)受到噪聲的影響。具體來說,在卡爾曼濾波的過程中,需要假設(shè)過程噪聲和測量噪聲是零均值白噪聲。然而,在組合導(dǎo)航中,由于各種各樣的因素(如傳感器誤差、環(huán)境干擾等),很難完全滿足這個(gè)假設(shè),導(dǎo)致噪聲的特性與理想情況有所偏差。組合導(dǎo)航時(shí)無法保證卡爾曼濾波的過程噪聲和測量噪聲保持零均值白噪聲,導(dǎo)致出現(xiàn)濾波發(fā)散問題,對下一時(shí)刻的預(yù)測造成影響。文獻(xiàn)[12-14]表明將模糊控制加入卡爾曼濾波中可以有效地解決非白噪聲時(shí)信號(hào)發(fā)散的問題。與傳統(tǒng)的精確控制方法相比,模糊控制不需要精確的數(shù)學(xué)模型,而是通過設(shè)計(jì)一組基于經(jīng)驗(yàn)規(guī)則的模糊邏輯來描述系統(tǒng)的行為,從而實(shí)現(xiàn)對系統(tǒng)的控制。上述文獻(xiàn)使用模糊控制自適應(yīng)卡爾曼濾波用來解算組合導(dǎo)航速度和位置,但并未對姿態(tài)進(jìn)行相應(yīng)解算。然而姿態(tài)信息對導(dǎo)航精確性也很重要。如果姿態(tài)估計(jì)不準(zhǔn)確,就會(huì)導(dǎo)致位置和方向估計(jì)出現(xiàn)偏差,從而影響導(dǎo)航的準(zhǔn)確性和穩(wěn)定性。姿態(tài)信息可以幫助我們理解載體相對于周圍環(huán)境的朝向和姿勢,從而更好地規(guī)劃路徑和避免障礙物。通過準(zhǔn)確獲取姿態(tài)信息,我們可以根據(jù)當(dāng)前環(huán)境的特點(diǎn)進(jìn)行決策,使導(dǎo)航系統(tǒng)更加智能、安全和高效。
針對上述問題,本文以GPS/SINS/偏振光組合導(dǎo)航系統(tǒng)為背景,設(shè)計(jì)了解算姿態(tài)角和速度、位置的模糊控制自適應(yīng)卡爾曼濾波算法,從而提升組合導(dǎo)航系統(tǒng)的精度和可靠性。
1 模糊控制自適應(yīng)卡爾曼濾波
1.1 自適應(yīng)卡爾曼濾波算法
卡爾曼濾波一直被用來估計(jì)動(dòng)態(tài)系統(tǒng)的狀態(tài),組合導(dǎo)航狀態(tài)方程和量測方程的離散化狀態(tài)為:
Xk=φk/k-1Xk-1+wk
Zk=HkXk+vk
(1)
式中,φk/k-1為系統(tǒng)的狀態(tài)轉(zhuǎn)移矩陣;Xk是系統(tǒng)狀態(tài)向量;wk為系統(tǒng)過程噪聲;Zk為系統(tǒng)觀測向量;Hk為觀測矩陣;vk為系統(tǒng)觀測噪聲。
組合導(dǎo)航以東北天坐標(biāo)系為導(dǎo)航參考坐標(biāo)系。SINS的狀態(tài)向量為:
(2)
式中,φE,φN,φU分別為東、北、天方向的姿態(tài)角誤差;δVE,δVN,δVU為東、北、天方向的速度誤差;δL,δλ,δh為經(jīng)度、緯度、高度誤差;εbx,εby,εbz為陀螺儀零偏;εrx,εry,εrz為加速度計(jì)零偏。
系統(tǒng)的量測分為兩部分:1)GPS/SINS的速度、位置誤差;2)SINS/偏振光的姿態(tài)誤差。
對觀測噪聲和系統(tǒng)噪聲進(jìn)行加權(quán):
觀測噪聲:
Rk=Rα-2(k+1)
(3)
系統(tǒng)噪聲:
Qk=Qα-2(k+1)
(4)
式中,Rk和R是觀測噪聲協(xié)方差矩陣,α是指數(shù)加權(quán)因子,Qk和Q是系統(tǒng)噪聲協(xié)方差矩陣。
卡爾曼濾波是對系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計(jì)的算法,分為時(shí)間更新和量測更新兩部分。根據(jù)上式對卡爾曼濾波的公式進(jìn)行推導(dǎo),得到指數(shù)加權(quán)自適應(yīng)卡爾曼濾波公式。指數(shù)加權(quán)自適應(yīng)卡爾曼濾波方程如下:
時(shí)間更新方程:
(5)
(6)
量測更新方程:
(7)
(8)
(9)

組合導(dǎo)航系統(tǒng)中輸入到模糊控制器的是殘差方差和理論協(xié)方差的差值DoM,通過計(jì)算DoM,可以評估不確定性的程度,并將其作為模糊控制器的輸入。模糊控制器根據(jù)這個(gè)輸入來調(diào)整比例因子α。
實(shí)際殘差方差計(jì)算:
(10)
理論方差值:
(11)
差值:
(12)
卡爾曼濾波沒有發(fā)散時(shí),理論方差值應(yīng)與實(shí)際殘差方差值差別不大,DoM的值應(yīng)為零均值白噪聲,發(fā)散后需要根據(jù)模糊控制規(guī)則來調(diào)節(jié)指數(shù)加權(quán)因子的大小,使DoM趨于零均值白噪聲。
1.2 偏振光導(dǎo)航原理
當(dāng)太陽光穿過大氣層時(shí),會(huì)與大氣中的分子和微粒發(fā)生散射現(xiàn)象。其中,當(dāng)入射光的波長遠(yuǎn)小于散射體的尺寸時(shí),由大氣分子引起的散射稱為Rayleigh散射。在這種散射過程中,光波與大氣中的顆粒發(fā)生相互作用,光的偏振狀態(tài)會(huì)發(fā)生改變,導(dǎo)致在大氣中形成穩(wěn)定的偏振分布模式。具體來說,Rayleigh散射使得入射光的偏振方向發(fā)生輕微偏離,其中垂直于光傳播方向的垂直偏振光相對于水平偏振光更強(qiáng)烈地散射出去。這一現(xiàn)象導(dǎo)致了大氣中的光呈現(xiàn)出特定的偏振分布模式,通常以水平方向偏振為主。
這種穩(wěn)定的大氣偏振分布模式在許多科學(xué)研究和應(yīng)用領(lǐng)域中具有重要意義。通過觀測和分析大氣中的偏振現(xiàn)象,我們可以獲取導(dǎo)航信息。早期人們發(fā)現(xiàn)動(dòng)物[15-16]具有超高的導(dǎo)航能力,對其進(jìn)行研究后發(fā)現(xiàn),它們利用探測到的天空偏振信息進(jìn)行導(dǎo)航。人類借鑒動(dòng)物的導(dǎo)航方式研制了偏振光導(dǎo)航傳感器。作為一種無源、自主的新型導(dǎo)航方式,偏振光導(dǎo)航更多地應(yīng)用于組合導(dǎo)航。
天空偏振光在宏觀上形成穩(wěn)定的偏振光分布模式,其中包含豐富的方向信息,如偏振度(DOP)、偏振角(AOP)。偏振度和偏振角度分別表示光的偏振度和光的振動(dòng)方向(E矢量方向)[17]。偏振光傳感器可分為點(diǎn)源偏振光傳感器和按成像偏振光傳感器。兩種測量原理基本相同,均用描述光的偏振狀態(tài)的斯托克斯向量法描述。斯托克斯向量有4個(gè)分量,即S=[I,Q,U,V]。其中I是總光強(qiáng)度。Q和U分別是兩個(gè)相互垂直的線性極化分量,V是圓偏振光,由于天空中主要是線偏振光,一般V=0。計(jì)算偏振角d和偏振度φ的公式為:
(13)
(14)
點(diǎn)源式是根據(jù)仿生物結(jié)構(gòu)設(shè)計(jì)的,一般采用光電二極管以及線性偏振片等。成像式探測系統(tǒng)一般使用相機(jī)測量,拍攝不同偏振方向上的圖像,然后對進(jìn)行圖像處理,解算偏振角。當(dāng)涉及區(qū)域范圍檢測時(shí),點(diǎn)源式偏振光傳感器通常具有較大的偵測范圍,可以覆蓋廣闊的區(qū)域。而圖像式偏振光傳感器則受限于相機(jī)的視野范圍,需要更多的傳感器組合或者移動(dòng)來實(shí)現(xiàn)大范圍的檢測。在實(shí)時(shí)性方面,點(diǎn)源式偏振光傳感器往往響應(yīng)速度更快,因?yàn)樗ㄟ^模擬電路直接處理信號(hào),幾乎可以實(shí)時(shí)獲取偏振光信息。而圖像式偏振光傳感器需要進(jìn)行圖像采集和解碼的過程,相較點(diǎn)源式傳感器會(huì)有一定的延遲,并且處理速度受到圖像采集和處理器性能的限制。至于計(jì)算量方面,點(diǎn)源式偏振光傳感器通常只需要進(jìn)行簡單的模擬電路處理,計(jì)算量較小。而圖像式偏振光傳感器需要對采集到的圖像數(shù)據(jù)進(jìn)行復(fù)雜的解碼和處理,相對而言計(jì)算量較大。
根據(jù)不同的使用需求,可以根據(jù)區(qū)域范圍、實(shí)時(shí)性和計(jì)算量等因素來選擇適合的偏振光傳感器類型。如果需要覆蓋廣闊區(qū)域、實(shí)時(shí)性要求較高,而對計(jì)算量和成本有一定限制,電源式偏振光傳感器可能更為適合。如果需要更高的空間分辨率、更豐富的信息量,并且計(jì)算資源和成本可以滿足,那么圖像式偏振光傳感器可能是更好的選擇。總之,根據(jù)具體需求和應(yīng)用場景,綜合考慮區(qū)域范圍檢測、實(shí)時(shí)性和計(jì)算量等因素,選擇適合的偏振光傳感器類型是非常重要的偏航角的獲取是解算偏振的最終目的。
根據(jù)偏振光的分布規(guī)律,我們可以觀察到大氣偏振模式具有明確的對稱性,太陽的位置決定了周圍大氣偏振度的分布規(guī)律。通過觀察天頂點(diǎn)和太陽位置之間的太陽子午線,可以確定當(dāng)前的大氣偏振模式。當(dāng)運(yùn)載體沿著特定方向移動(dòng)時(shí),天空中的特征點(diǎn)相對于運(yùn)載體坐標(biāo)系也會(huì)發(fā)生位置變化。借助這些特征點(diǎn)的空間位置變化,結(jié)合大氣偏振模式,我們可以計(jì)算出相對于運(yùn)載體的航向角。圖1為天空偏振模式圖。
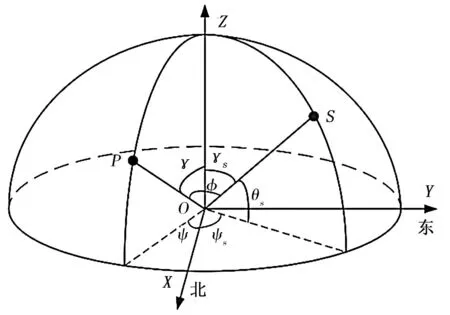
圖1 天空偏振模式圖
圖1中,以觀測點(diǎn)O為坐標(biāo)原點(diǎn),頭頂方向?yàn)閆軸正方向。球面上任意一點(diǎn)P的觀測點(diǎn)方位角為ψ,觀測點(diǎn)天頂角為γ。太陽位置為S,太陽天頂角為γs,太陽高度角為θs,太陽方位角為ψs。根據(jù)觀測位置的經(jīng)緯度、具體的日期以及時(shí)間能獲取此刻的太陽高度角和太陽方位角。用偏振光傳感器檢測天空中的偏振信息,根據(jù)瑞利散射規(guī)律計(jì)算可得航向角。
1.3 模糊控制
模糊控制是一種基于模糊邏輯的控制方法,更貼近人類的思維方式,能夠有效處理非線性和模糊信息。與傳統(tǒng)的二值邏輯不同,模糊邏輯能夠更靈活地處理現(xiàn)實(shí)生活中各種相似和不精確的情況,而不僅僅局限于真或假。通過使用模糊邏輯,可以建立模糊規(guī)則庫來描述輸入和輸出之間的關(guān)系。模糊控制器通過隸屬度函數(shù)對輸入變量進(jìn)行模糊化,并根據(jù)模糊規(guī)則執(zhí)行推理過程來生成模糊輸出。隸屬度函數(shù)用來刻畫一個(gè)對象隸屬于某種定義的程度,隸屬度函數(shù)具體的選擇需要根據(jù)實(shí)際問題的特點(diǎn)和需求來確定,正確的構(gòu)造隸屬度函數(shù)是運(yùn)用模糊理論解決實(shí)際問題的基礎(chǔ),通過正確構(gòu)造隸屬度函數(shù),我們能夠更準(zhǔn)確地將模糊的現(xiàn)實(shí)世界問題轉(zhuǎn)化為模糊集合的運(yùn)算和推理。模糊規(guī)則庫包含大量控制規(guī)則,是將實(shí)際控制經(jīng)驗(yàn)進(jìn)行歸納總結(jié)并提取規(guī)律到模糊控制器的關(guān)鍵步驟[18]。最后,通過解模糊化將模糊輸出轉(zhuǎn)換為具體的、精確的控制信號(hào)來解決實(shí)際問題。模糊邏輯的優(yōu)勢在于其能夠處理模糊、不確定的信息和語義模糊的問題。例如,在溫度控制系統(tǒng)中,溫度高、溫度低等概念并沒有明確的定義,模糊邏輯可以在考慮到環(huán)境條件的情況下,根據(jù)模糊規(guī)則進(jìn)行控制。這使得模糊控制在工業(yè)自動(dòng)化、交通系統(tǒng)、電力系統(tǒng)等領(lǐng)域得到廣泛應(yīng)用。總的來說,模糊控制利用模糊邏輯的靈活性和對不確定性問題的處理能力,適用于各種實(shí)際問題的解決。模糊控制將人的經(jīng)驗(yàn)知識(shí)轉(zhuǎn)化為控制策略,建立在對系統(tǒng)的數(shù)學(xué)模型之上。由于模糊控制能夠整合操作人員的經(jīng)驗(yàn)知識(shí),因此它能夠在模型難以確定的系統(tǒng)中發(fā)揮出較好的控制作用。特別是在對象參數(shù)發(fā)生變化的情況下,模糊控制具有更強(qiáng)的適應(yīng)性和魯棒性。模糊控制器的基本結(jié)構(gòu)如圖2所示。
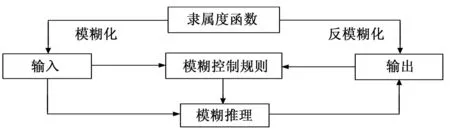
圖2 模糊控制器
2 組合導(dǎo)航算法設(shè)計(jì)
組合導(dǎo)航在實(shí)際應(yīng)用中有著獨(dú)特的優(yōu)勢,導(dǎo)航工具性能受限時(shí)高效的濾波算法是提高組合導(dǎo)航系統(tǒng)精度和穩(wěn)定性的關(guān)鍵[19]。組合導(dǎo)航算法可以避免單一傳感器故障或信號(hào)遮擋等問題帶來的導(dǎo)航失敗。可以利用多個(gè)傳感器的不同測量信息,進(jìn)行誤差補(bǔ)償和校正,從而提高導(dǎo)航精度和準(zhǔn)確性。在常見的SINS和GPS的組合導(dǎo)航解算速度和位置的基礎(chǔ)上,本系統(tǒng)加入SINS/偏振光導(dǎo)航,計(jì)算導(dǎo)航系統(tǒng)的姿態(tài)角。本文將基于模糊控制的自適應(yīng)卡爾曼濾波算法(FAKF)用到SINS/偏振光的姿態(tài)解算和GPS/SINS速度位置解算中。模糊自適應(yīng)卡爾曼濾波是一種數(shù)據(jù)處理方法,它通過觀測數(shù)據(jù)來校驗(yàn)預(yù)測值,并在更新預(yù)測值的同時(shí)檢測系統(tǒng)特性是否發(fā)生了變化,使用模糊控制系統(tǒng)實(shí)時(shí)地調(diào)整權(quán)值矩陣,從而對模型參數(shù)和噪聲特性進(jìn)行估計(jì)和修正。
2.1 系統(tǒng)整體設(shè)計(jì)
慣性導(dǎo)航系統(tǒng)的工作不依賴任何外部信息,慣導(dǎo)的陀螺儀和加速度計(jì)數(shù)據(jù)解算東北天向的速度位置信息和姿態(tài)角信息。GPS在無遮擋的情況可以持續(xù)獲得速度和位置信息。偏振光導(dǎo)航系統(tǒng)連續(xù)為載體提供姿態(tài)信息。目前,偏振光導(dǎo)航技術(shù)已經(jīng)在機(jī)器人、水下探測、智能家居等領(lǐng)域使用。將偏振光導(dǎo)航與慣性導(dǎo)航系統(tǒng)進(jìn)行組合,可以更加精準(zhǔn)地實(shí)現(xiàn)自主導(dǎo)航和定位。慣導(dǎo)會(huì)隨著時(shí)間積累誤差,為了彌補(bǔ)慣性導(dǎo)航的不足,使用GPS/SINS組合導(dǎo)航子系統(tǒng)解算組合后的東北向速度和位置信息,SINS/偏振光導(dǎo)航系統(tǒng)解算組合后的姿態(tài)角信息。
本系統(tǒng)一部分采用GPS/SINS為導(dǎo)航提供需要的速度和位置信息,速度位置解算流程如圖3所示。另一部分使用SINS/偏振光組合導(dǎo)航系統(tǒng)來獲得更高精度的姿態(tài)信息如圖4所示。
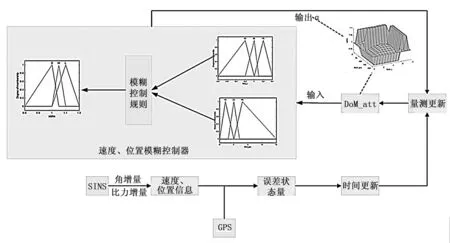
圖3 速度位置解算流程圖
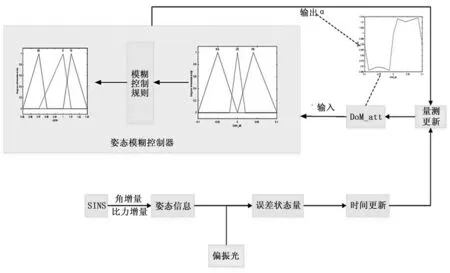
圖4 姿態(tài)解算流程圖
對兩個(gè)子系統(tǒng)分別設(shè)計(jì)模糊邏輯控制器根據(jù)模糊控制規(guī)則調(diào)整自適應(yīng)卡爾曼濾波的指數(shù)加權(quán)因子的大小,不斷調(diào)整濾波器的量測噪聲的大小,從而抑制濾波器發(fā)散。
2.2 模糊控制器設(shè)計(jì)
模糊控制理論認(rèn)為人類對自身和設(shè)備的控制是基于規(guī)則的。在進(jìn)行模糊規(guī)則制定之前,需要進(jìn)行模糊分割來確定每個(gè)語言變量取值的模糊語言名稱個(gè)數(shù)。語言名稱需要考慮實(shí)際問題的特點(diǎn)和要求。例如,在處理溫度問題時(shí),可以選擇3個(gè)模糊語言名稱:低、中、高,以描述不同的溫度水平。而在處理濕度問題時(shí),可以選擇3個(gè)模糊語言名稱:干燥、適中、潮濕。模糊分割的數(shù)量主要決定了模糊控制的精細(xì)化程度,需要在模糊分割數(shù)量的選擇中進(jìn)行權(quán)衡。如果模糊分割過細(xì),將會(huì)增加模糊控制規(guī)則的數(shù)量,導(dǎo)致工作量增大,同時(shí)也會(huì)增加計(jì)算復(fù)雜度。因此,在制定模糊規(guī)則時(shí),應(yīng)該根據(jù)實(shí)際需求和能承受的計(jì)算量來決定模糊分割的數(shù)量。但是,模糊分割的數(shù)量也不能太少,否則會(huì)導(dǎo)致控制太粗略,難以達(dá)到期望的控制效果。如果模糊分割過少,可能會(huì)存在信息丟失或不準(zhǔn)確的情況,導(dǎo)致控制效果不理想。因此,在制定模糊規(guī)則時(shí),還需要考慮控制精度和誤差容忍度等因素,以確定適當(dāng)?shù)哪:指顢?shù)量,從而解決復(fù)雜的控制問題達(dá)到較好的控制效果。模糊系統(tǒng)的輸入和輸出分割后可以用模糊等級來描述如NS(Negative Small)、ZE(Zero)、PS(Positive Small)等。根據(jù)模糊分割后的等級進(jìn)行模糊控制規(guī)則的制訂。本系統(tǒng)設(shè)計(jì)了兩個(gè)模糊控制器對系統(tǒng)進(jìn)行解算。
SINS/偏振光組合導(dǎo)航子系統(tǒng)的輸入DoM_att是偏航角的理論協(xié)方差值減去實(shí)際殘差方差的差值,輸入為α2,本模糊控制規(guī)則的描述如下:
If (DoM_attisNS) then (alphaisXS)
If (DoM_attisZE) then (alphaisS)
If (DoM_attisPS) then (alphaisM)
GPS/SINS組合導(dǎo)航子系統(tǒng)的兩個(gè)輸入分別為DoM_V和DoM_pos是速度和位置的理論協(xié)方差值減去實(shí)際殘差方差的差值,輸出為α1,采用的模糊控制規(guī)則如表1所示。
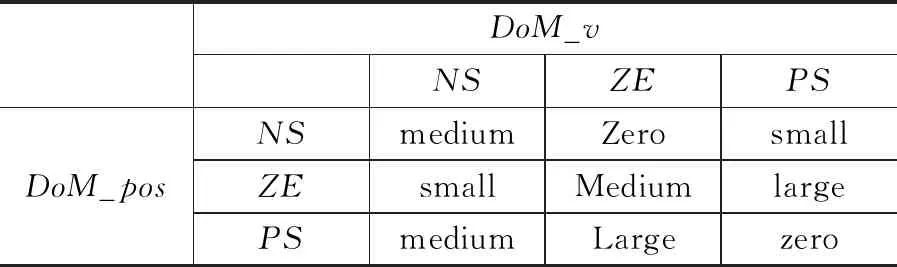
表1 模糊控制規(guī)則
隸屬度函數(shù)有三角隸屬度函數(shù)、梯形隸屬度函數(shù)、高斯隸屬度函數(shù)、S型隸屬度函數(shù)等[20],三角隸屬度函數(shù)具有良好的控制性能,三角隸屬度函數(shù)的簡單性也使得系統(tǒng)的計(jì)算效率相對較高。本系統(tǒng)采用三角隸屬度函數(shù)進(jìn)行模糊化和去模糊化。
3 仿真實(shí)驗(yàn)結(jié)果
為了驗(yàn)證本文設(shè)計(jì)的模糊控制自適應(yīng)卡爾曼濾波(FAKF)能夠優(yōu)化擴(kuò)展卡爾曼濾波(EKF)發(fā)散問題,進(jìn)行了仿真實(shí)驗(yàn)。設(shè)置初始經(jīng)度為112.444 7°、緯度為38.017 8°、高度為825 m,初始速度和姿態(tài)角為0,陀螺零偏為10/h。偏振傳感器測量精度為0.3°。三維仿真軌跡如圖5所示。
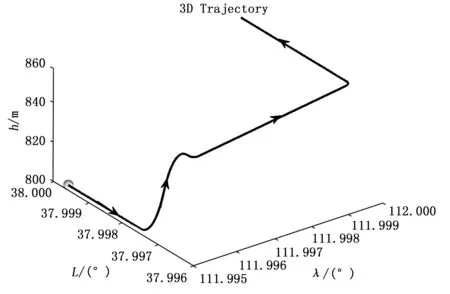
圖5 仿真軌跡圖
本文設(shè)計(jì)GPS/SINS組合導(dǎo)航子系統(tǒng)基于模糊控制的自適應(yīng)卡爾曼濾波(FAKF)和擴(kuò)展卡爾曼濾波(EKF)東北向速度誤差和位置誤差對比如圖6和7所示。
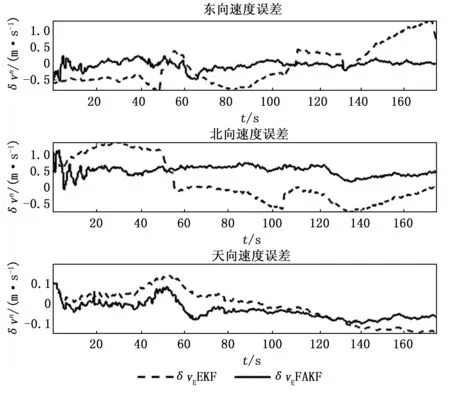
圖6 東北天向速度誤差對比圖
從圖6和圖7可以看出兩種算法的東北天向速度和位置誤差對比結(jié)果,實(shí)線表示的模糊控制自適應(yīng)卡爾曼濾波算法(FAKF),虛線表示擴(kuò)展卡爾曼濾波算法(EKF)。本文算法在速度和位置誤差方面有較好的收斂性,誤差曲線也較為平滑,精度有明顯提高。
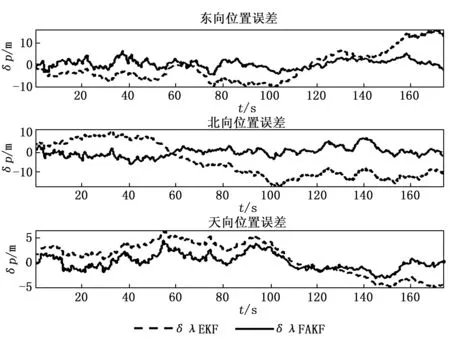
圖7 東北天向位置誤差對比圖
在仿真時(shí)未考慮橫滾,故SINS和偏振光子系統(tǒng)解算時(shí)僅計(jì)算俯仰角和航向角。兩種算法對比的組合導(dǎo)航系統(tǒng)的姿態(tài)誤差,如圖8所示。
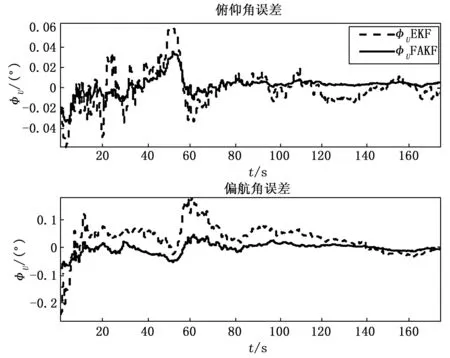
圖8 東北向姿態(tài)誤差圖
從圖8可以看出兩種算法的俯仰角和航向角對比結(jié)果,實(shí)線表示的模糊控制自適應(yīng)卡爾曼濾波算法(FAKF),虛線表示擴(kuò)展卡爾曼濾波算法(EKF)。SINS/偏振光解算姿態(tài)角時(shí)加入模糊控制自適應(yīng)卡爾曼濾波算法(FAKF),誤差曲線更為平穩(wěn)。
根據(jù)均方誤差對比如表2所示,可知本文算法比擴(kuò)展卡爾曼濾波算法(EKF)在東、北、天向位置上分別提升精度56.81%、65.17%、45.99%,東、北、天向速度上提升精度46.99%、54.01%、43.82%,俯仰角、航向角分別提升精度58.01%、53.58%。仿真結(jié)果表明,該算法設(shè)計(jì)的隸屬度函數(shù)和模糊控制規(guī)則優(yōu)化了擴(kuò)展卡爾曼濾波發(fā)散問題。
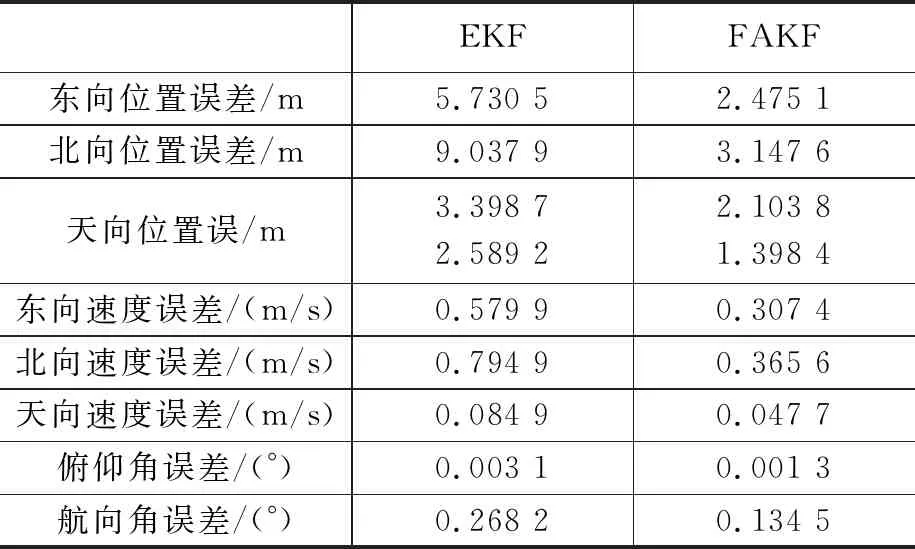
表2 均方誤差對比表
4 結(jié)束語
本文研究了GPS/SINS/偏振光組合導(dǎo)航下基于模糊控制的自適應(yīng)卡爾曼濾波算法,設(shè)計(jì)了模糊控制器來調(diào)節(jié)指數(shù)加權(quán)因子的大小。模糊控制是一種基于專家知識(shí)和操作者經(jīng)驗(yàn)的決策方法,它能夠以規(guī)則的形式表達(dá),并模擬人類的決策過程。這種方法具有較強(qiáng)的知識(shí)表達(dá)能力,可以通過模糊邏輯對不確定性和模糊性進(jìn)行處理,從而實(shí)現(xiàn)更加精準(zhǔn)地控制和決策。模糊控制應(yīng)盡可能準(zhǔn)確地建立被控對象的數(shù)學(xué)模型,確保控制系統(tǒng)的穩(wěn)定性。在模糊控制中,模糊控制規(guī)則是實(shí)現(xiàn)控制功能的關(guān)鍵,它決定了輸出結(jié)果如何對輸入進(jìn)行響應(yīng)。一個(gè)優(yōu)秀的模糊控制系統(tǒng)必須具備豐富而準(zhǔn)確的模糊控制規(guī)則。在實(shí)際應(yīng)用中,為了獲得更好的控制效果,提高系統(tǒng)對輸入變量的處理精度需要完善模糊控制規(guī)則。
偏振光導(dǎo)航作為一種新興的導(dǎo)航技術(shù),正在不斷發(fā)展和探索中。它具有不受信號(hào)遮擋和多徑效應(yīng)影響、高精度定位和導(dǎo)航等優(yōu)勢,有望在室內(nèi)定位、無人車、機(jī)器人導(dǎo)航等領(lǐng)域發(fā)展出更多實(shí)際應(yīng)用。隨著相關(guān)技術(shù)的不斷成熟和突破,偏振光導(dǎo)航有望成為未來導(dǎo)航領(lǐng)域的重要研究方向和應(yīng)用方向。雖然具有很多優(yōu)勢,但同時(shí)也存在著一些缺點(diǎn)和挑戰(zhàn)。特別是在復(fù)雜的戶外環(huán)境,光的傳播路徑和偏振狀態(tài)變化更加復(fù)雜,這對偏振光導(dǎo)航系統(tǒng)的設(shè)計(jì)和算法提出了更高的要求。偏振光導(dǎo)航技術(shù)尚處于研究和探索階段,仍需要進(jìn)一步優(yōu)化和完善。雖然在某些場景下具有明顯的優(yōu)勢,但同時(shí)也存在著一系列的挑戰(zhàn)和限制,需要通過開展更多的研究和實(shí)踐,不斷推動(dòng)偏振光導(dǎo)航技術(shù)的發(fā)展和應(yīng)用。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
幸福(2018年33期)2018-12-05 05:22:42
測控技術(shù)(2018年12期)2018-11-25 09:37:34
Coco薇(2017年11期)2018-01-03 20:59:57
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
中國科技信息(2016年14期)2016-07-31 21:16:32
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
