道路環境與駕駛行為數據同步采集系統研發
2024-05-17 11:56:54汪名選
計算機測量與控制 2024年4期
關鍵詞:系統
楊 軫,汪名選,劉 帥
(1.同濟大學 交通運輸工程學院,上海 201804;2.同濟大學 道路與交通工程教育部重點實驗室,上海 201804)
0 引言
隨著我國智能交通、智慧城市的建設與發展,交通數據的采集方式已由早期的人工計數和調查表,逐步發展為視頻圖像、感應線圈、激光與毫米波雷達、紅外監測等新型數據采集技術,該領域的自動化趨勢日漸明顯[1]。交通數據采集可面向多個應用層面,包括交通協同運行與管控、道路交通狀態監測、交通流調控與誘導等等,而現有的研究較多基于交通管控層面對特定區域進行涵蓋多目標的交通數據采集,針對在途交通層面(如面向自動駕駛的真實道路駕駛數據采集、面向駕駛行為譜研發、交通預警)的研究較少。
對于自動駕駛領域而言,自動駕駛仿真場景庫是自動駕駛測試驗證不可或缺的角色,建立場景庫則需要大量的場景數據,依據三支柱測試法[2-5],為保證測試中的安全與可靠性,通常至少需要106~108個自動駕駛場景,雖然目前德國KITTI、美國NHTSA、中國騰訊TAD Sim等團隊都在為自動駕駛測試開發領域構建了大型的自動駕駛場景數據庫,其中公認具有代表性的成果有PEGASUS和AdaptIVe等[6-8],但是其相關的技術資料在包含項目工作領域、項目組成、項目費用等基本文件的基礎上[9],對高精度駕駛場景大數據采集技術的研發仍有進一步提升的空間。自動駕駛的數據源可分為真實數據與仿真數據,描述了道路環境、各類交通參與者與主控車輛本身的狀態信息[10-14],其中真實數據則包含自然駕駛數據,要求在車輛上安裝各類傳感器進行數據采集[15],由于自然駕駛數據對于維度、精度的要求較高,搭建可靠的多模塊數據采集平臺至關重要,這也成為了自動駕駛領域后期各項仿真研究的奠基。而對于不同工況駕駛行為譜構建層面則需要大量不同場景下本車與周圍環境車輛相對位置、速度、加速度等各項指標,王可等人[16-17]利用車輛加速度、車道偏移、本車與后車間距等指標研究不良駕駛行為譜的分析方法。目前對于該方面研究的數據采集方式包含駕駛模擬器、無人機視頻識別、激光雷達、毫米波雷達、車輛CAN總線、GPS等[18],其中駕駛模擬器本身存在一些局限性,一方面模擬器場景搭建與真實場景存在一定差別,一定程度上影響了駕駛員的決策,另一方面模擬器的數據可靠性有待進一步研究;而其余的單一數據采集手段在精度與數據采集多樣性上有待提升,故研發一套集本車駕駛行為與周圍環境車輛數據于一體的多模塊可移植高精度數據采集平臺對該領域的深入研究起著不可或缺的作用。
目前對于交通數據采集的研究采用了多種數據采集設備與方法,可以分為基于路側監控設備和基于車載設備的交通數據采集方式,對于路側監控設備數據采集方式而言,Kim等人[19]證明了無線微波雷達檢測器在交通檢測中的可行性;Kong等人[20]利用三軸檢測器檢測的三軸波形對車輛建立標簽;劉元昊等人[21]采用雷視一體機的毫米波雷達與雙目相機結合的方式對交通流信息進行采集,利用毫米波雷達獲取車輛位置、速度等信息,利用雙目相機實時檢測流量與駕駛行為,通過分析視頻圖片提取車輛運動軌跡,但缺點在于對被遮擋車輛的各類車型識別精度不高,且采集位置始終固定,無法對同一目標長時間跟蹤,沒有融合其它設備。對于車載設備數據采集方式而言,朱紅賽[22]結合“組合導航系統+激光雷達+攝像頭”傳感器方案設計了無人駕駛車載傳感器數據采集與處理系統,張藝等人[23]選取激光雷達、毫米波雷達、全景相機作為主要傳感器,證明了多種設備融合下采集精度高于單一設備,但是缺乏融合后的數據優化處理。陳駿生[24]提出一種基于自動駕駛電動車輛的數據采集方法,完成激光雷達、音視頻數據和CAN總線數據的傳輸和融合,但未完成時間同步。以上各研究對于數據精度方面缺乏驗證,且駕駛人本身的駕駛行為也往往被忽視,在數據采集深度方面也有很大的研究發展空間。
總結國內外研究現狀與發展趨勢可得,上述各類系統與平臺在交通數據采集方面發揮著顯著的作用,但與此同時也存在一些不足,主要表現在以下3個方面:
1)當前現有的交通數據采集系統研究中,對于路側采集方式而言,存在針對特定的數據采集需求、局限于固定數據采集模式的現象,并且這些數據采集設備需要布設于特定的路段或區域,以山西五盂智慧高速路段為例,其全長包含36個毫米波雷達和卡口視頻融合的感知點位,利用視頻檢測提取車牌數據,再通過雷達對運行軌跡和變道行為進行檢測,此種方案一方面要考慮到施工難度與工程造價的問題,另一方面所獲得的交通數據精度不足,數據內容不夠全面,應用價值僅局限于交通管控層面,而難以為自動駕駛、駕駛行為譜構建等在途交通環境數據領域的進一步研究提供有效幫助。而對于車載設備數據采集方式而言,設備的多樣性有待提升,且數據融合及優化處理也有較大研究空間。
2)現有的交通數據采集與監測系統包含固定采集源針對固定范圍的視頻圖像分析,易受到采集攝像頭監測范圍及清晰度的約束,且易受到外界天氣等因素的干擾。
3)目前的數據采集系統結構單一,大多采用了固定的一種至兩種采集設備,采集獲得的數據效用有限,且缺乏將駕駛行為數據與交通環境數據進行同步采集、將多源交通數據進行融合的相關實踐與研究。
因此如何在滿足高精度、高效率、多方位的數據采集技術需求的條件下研發面向多領域的多模塊交通數據采集平臺是該領域應當長期研究的問題,本文完成了一種道路交通環境與駕駛行為數據同步采集系統,該系統融合高精度定位與慣性測量、雷達檢測、視頻識別與駕駛行為數據采集,實現了多方位、高精度的采集需求,可移植于小汽車、貨運車輛、客運大巴等多種車輛類型。
1 系統總體設計
1.1 需求分析
多模塊數據采集平臺在進行交通數據采集的過程中,不同的模塊承擔著不同的采集任務,針對交通在途場景而言,采集的交通場景數據應當具有真實性、代表性、可靠性等特點,綜合考慮場景數據的需求,將數據分為本車數據和其它交通參與者數據兩大類,如圖1所示。其中本車數據由定位與運動參數、駕駛行為參數構成。其它交通參與者數據由機動車、非機動車、行人運動參數組成,本車運動參數可以細分為本車定位信息、加速度和三軸姿態角,駕駛行為參數可以細分為踩踏踏板、轉動方向盤的情況;其他交通參與者的運動參數可以細分為速度、相對本車的距離等信息。

圖1 多模塊交通數據采集要素
與此同時,為了最大化滿足多源交通數據采集的總體要求,該系統在硬件方面還需包含以下特性:
1)采集精度的可靠性。為保證交通場景數據的準確性,數據采集模塊的精度需要在一定范圍內,例如本車位置精度在0.1 m內、速度精度在0.1 m/s內、周邊車輛位置相對精度在0.5 m內、前后感知距離在100 m以上等。
2)系統時間同步。在該系統中,由于各個模塊硬件上的離散性,無法為每個模塊提供統一的全局時鐘,而由各個硬件模塊獨立維護各自的本地時鐘。又由于這些模塊的采樣頻率、運行特性存在不一致性,因此即使所有模塊時間戳在某一時刻被校準一致,在經歷一段時間后,這些本地時鐘也會出現不一致。為保證每個模塊的本地時鐘在某一時刻再次重合,必須進行系統時間同步操作。系統時間同步一向是設備系統集成中的一個重點和難點。常見的同步方法包括網絡授時、衛星授時、無線電波授時等方法,不同的方法由于數據傳輸平均時間延誤,也存在著不同的自身難以逾越的精度限制。
在軟件方面需求包含以下特性:
1)多模塊數據集成可視化。為保證采集獲得的交通環境與駕駛行為數據在系統時間同步的基礎上便于我們對駕駛人所做出的決策進行準確判斷以及分析周邊道路環境對駕駛人行為的影響,需要將各模塊的數據進行同步集成可視化。
2)多種數據傳輸模式。支持實時和時段傳輸模式,其中實時傳輸模式支持按照設備采樣頻率在實驗現場連續采集并傳輸設備數據;時段傳輸模式依據給定的時間段范圍集中傳輸各設備模塊暫存的數據。
3)數據格式統一化。上位機程序可以將各下位機采集模塊獲得的數據轉換為統一的便攜式數據格式如txt、csv等,便于后期的數據共享及使用。
1.2 系統總體結構
依據采集獲得的多源交通環境與駕駛行為數據的系統需求,選用數據采集設備由表1所示,場景要素主要分為本車和其他交通參與者,其中本車數據采集工作由車載運動測量與組合定位系統與位移傳感器承擔,其它交通參與者數據采集工作由道路多維感知一體機激光雷達承擔。

表1 交通數據采集設備與內容
設計多源交通環境與駕駛行為數據的總體結構如圖2所示。其中下位機子系統可以細化為數據采集器、I/O轉換與數傳模塊和數據存儲模塊,其主要功能是采集、轉換和存儲各模塊的多源交通環境與駕駛行為數據,并將這些數據封裝成統一格式的數據包,通過RJ45網口、TCP協議、CAN總線接口等方式傳輸至上位機系統。上位機子系統具有對下位機子系統采集獲得的數據進行預處理分析、修正標定、動態實時可視化及存儲等功能,并能夠將所有的數據導出為便攜格式的數據文件便于后期的分析與建模。
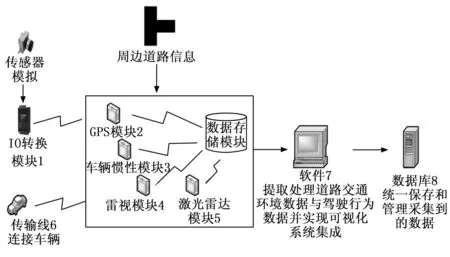
圖2 系統總體功能圖
在該系統中,上位機子系統同時與下位機子系統的多個模塊連接,各模塊采用的數據通信方式可以互不相同,各模塊的采集過程可以同步運行,每一個模塊均只有一個唯一固定的采集器設備,其中車載踏板與方向盤位移傳感器模塊中的每個I/O轉換模塊可以與1~4個位移傳感器連接。每個模塊的數據處理與封裝均由存儲模塊實現,存儲從連線與通信模式上來看,上位機子系統與下位機子系統之間的通信可以采用RJ45網口,利用TCP/IP通信協議進行數據傳輸。
1.3 硬件系統基本功能
在對多源道路交通環境及駕駛行為數據進行采集、轉換、傳輸和預處理的過程中,往往要經歷如圖3所示的若干個步驟。以位移傳感器為例,首先要將駕駛人轉動方向盤、踩踏踏板的物理量通過傳感器轉化為電信號模擬量,再通過IO轉換模塊將模擬量通過RJ45通信接口與工控機相連,利用工控機對數據進行處理、標定與存儲。各個模塊傳輸至車載電腦的數據內容與格式互不相同,需要利用上位機程序進行標定、處理、分析與可視化,以實現對應功能。
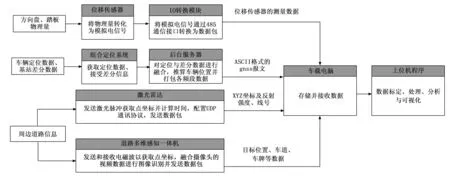
圖3 系統各模塊功能圖
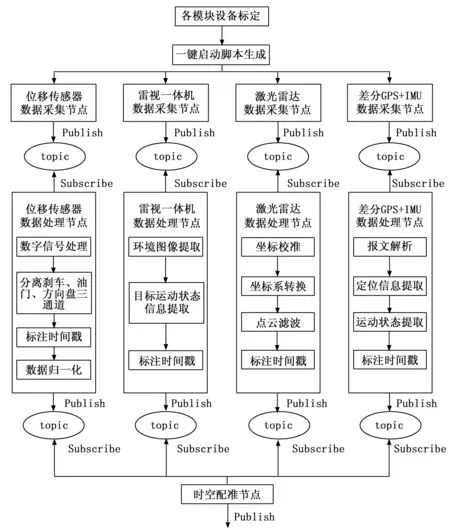
圖4 基于ROS的數據同步采集系統總體框架
為實現各模塊數據同步采集功能,利用機器人操作系統(ROS,robot operating system)實現同步傳輸,通過消息傳遞通信的分布式多進程框架,將網絡通信中的TCP/IP通信機制封裝為ROS話題節點通信機制,從而實現多進程間點對點的耦合連接。在ROS系統中,每個模塊被視為節點(Node),節點為執行進程,節點間可以以消息(Message)進行相互通信,而話題(Topic)用于標識消息的名稱,每個消息必須發布到對應的話題中,再通過話題實現ROS分布式網絡的路由轉發,節點間可以訂閱(Subsribe)某話題以獲取該話題消息,也可以發布(Publish)消息至對應話題。基于ROS的道路環境與駕駛行為數據同步采集系統總體框架如圖 4所示。
本文設計的數據采集系統總體框架思路如下:
1)編寫launch腳本,確保各模塊數據采集裝備電路正常后,利用roslaunch命令實現一鍵啟動。
2)各個模塊的數據采集節點在完成數據采集工作后以消息的數據結構形式發布(Publish)相應話題(Topic),各個傳感器數據處理節點通過訂閱(Subscribe)對應話題對源數據進行處理。
3)各模塊數據處理腳本工作結束后,時空配準節點對各模塊不同類型數據進行時空配準,為每幀數據附上時間戳以完成時間同步和維持采集對象的信息統一性,并將各模塊數據發布以供其它節點訂閱。
2 系統模塊設計
2.1 系統模塊選型與布局
根據采集系統設計方案,需要確定各模塊所用的設備類型,綜合考慮設備性能參數和數據采集需求,對各模塊的設備一一進行選型與布設。
收集各模塊對應數據信息,應配備輕型大容量高性能車載電腦,本系統選用工控機收集相應數據并實現數據處理、標定與可視化。
為采集本車定位信息與運動狀態,需要應用本車CAN口輸出本車經緯度、三軸加速度和三軸姿態角,故應當采用高精度差分定位模塊結合慣性測量單元,精度達到0.1 m以內。其次,需要通過位移傳感器采集駕駛人對于踏板與方向盤的操控情況,其中采集方向盤位移的傳感器量程應采用1 000 mm,踏板傳感器的量程采用500 mm,并需要通過I/O聯網模塊將傳感器模擬信號轉換為數字信號傳至工控機。
為采集本車周邊交通參與者信息,需要采集本車周圍目標的位置、速度、類型與偏移量,故本車需要布設多個傳感器以滿足上述采集需求。在車頂架兩側安裝大于等于32線的激光雷達覆蓋本車周圍360°的目標三維點云坐標信息,前后各安裝一個道路多維感知一體機,利用視頻識別原理對本車前后交通參與者進行實時識別以及速度、類型信息的提取,測距精度應在0.3 m內,測速精度應在1 km/h以內,要求采集范圍內不出現本車車身。
為實現對各模塊的持續供電,需采用大容量長續航的車載電源,本系統采用24 V/100 Ah的磷酸鐵鋰電池,并根據各模塊不同的工作電壓及工作模式配備了相應的變壓與穩壓模塊。
結合上述需求,各模塊實現的選型及技術參數如表2所示。

表2 系統各模塊及其對應功能
最終確定該系統下位機硬件布設方案如圖5所示,設備支撐結構主要由兩層車頂架組成。
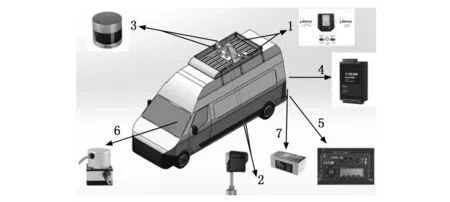
1.車載運動測量及組合定位系統;2.雷視道路多維感知一體機;3.32線激光雷達;4.I/O聯網模塊;5.工控機模塊;6.位移傳感器模塊;7.車載電源與變壓穩壓模塊。
2.2 系統模塊測試
2021年1月18日,課題組委托上海機動車檢測認證技術研究中心有限公司開展“道路交通環境與駕駛行為同步采集系統”的性能測試(如圖6所示)。測試在該公司測試跑道開展現場,中心內部測試道路長約800 m,寬約40 m,可開展汽車整車性能測試及智能網聯汽車ADAS功能測試。

圖6 第三方現場檢查
1)車載運動測量與組合定位系統模塊:
該模塊和定位基站、后臺服務器構成完整的測試系統。能夠實時提供車輛的主要運動參數和高精度定位信息,并可根據不同的需求配置不同的工作模式,包括數據輸出類型和刷新頻率等。由于針對汽車應用設計,在定位連續性、航向的穩定性等方面的性能比一般RTK定位模塊有明顯改善,經過定位基站差分后的靜態差分精度可以達到±2.5 mm左右,動態差分精度可以達到±10 mm左右。
對該車載運動測量及組合定位系統進行測試,其中待測組合定位系統安裝在車輛中部,基準定位系統安裝在車輛尾部,二者在車輛軸線方向上的距離為1.5 m,測試其定位精度與速度精度。待測組合定位系統每0.01秒輸出一次位置坐標,采樣頻率為100 Hz,兩套定位系統在同一時間戳下的定位坐標對比結果及平均速度對比結果如表3和表4所示。

表3 定位坐標比對數據

表4 定位速度比對數據
2)車載踏板與方向盤位移傳感器模塊:
分別將3個米朗MPS-XS位移傳感器連接在車輛的油門踏板、制動踏板位移和方向盤的轉動軸上,駕駛人在操作時傳感器能夠實時輸出三者的位移模擬信號,經過I/O聯網模塊轉為數字信號后向上位機傳輸位移數據,進而通過位移判定駕駛人的駕駛行為,如表5所示。

表5 駕駛行為數據
該系統測試過程中對制動踏板、油門踏板和方向盤的轉動進行操作,測試過程中,油門深度不斷變大,方向盤完成向右換道,制動踏板不變,數據變化表所示,由此判斷該位移變化符合實際情況。
3)雷視道路多維感知一體機模塊:
該模塊用于檢測主控車輛前后側的目標運動狀態,支持毫米波雷達檢測目標信息與視頻數據的融合,可提供基于視頻的車牌、車輛特性識別結果等信息,包含顏色、品牌等,同時可提取機動車、非機動車與行人距離相機中心的XY偏移以及縱向、橫向速度,如表6所示。

表6 前后側目標車輛感知比對數據
利用該系統中的定位模塊對雷視一體機感知精度進行測試,在測試場地中,測試車輛與目標車輛均安裝經標定的車載運動測量與組合定位系統,兩車位于相鄰車道同向行駛,測試車輛不斷改變與目標車輛之間的距離,追及并超越目標車輛。測試車輛采用雷視一體機實時采集前后方目標車輛的相對位置,通過比對測試車輛感知到的目標車輛坐標與目標車輛基準定位系統的定位坐標,測試前后側目標車輛的感知精度,其中車輛行駛航向角為28.9°,當感知坐標為(3.564,179.428)時,即目標車輛位于測試車輛前方180 m處,位置測量誤差為0.227 3 m。最后計算可得測試場景中前后目標車輛距離的中誤差即前后側目標車輛感知精度為0.255 8 m。
4)32線激光雷達模塊:
該激光雷達模塊在主控車輛運動時利用脈沖回波原理,以每秒120萬點的數據回波速率實時掃描周圍道路基礎設施和各類道路使用者信息,生成相對應的XYZ激光點云數據。
對該模塊進行測試過程中,目標車輛靜止停放,測試車輛與目標車輛并列停放,采用32線激光雷達采集左右兩側車輛的點云數據,在可視化點云數據中量取目標車輛與測試車輛激光雷達的最短水平距離,并與實際測量的兩車最短水平距離做比對,改變測試車輛的位置進行多次測量,以此測試左右側目標車輛的感知精度,測試結果如表7所示。
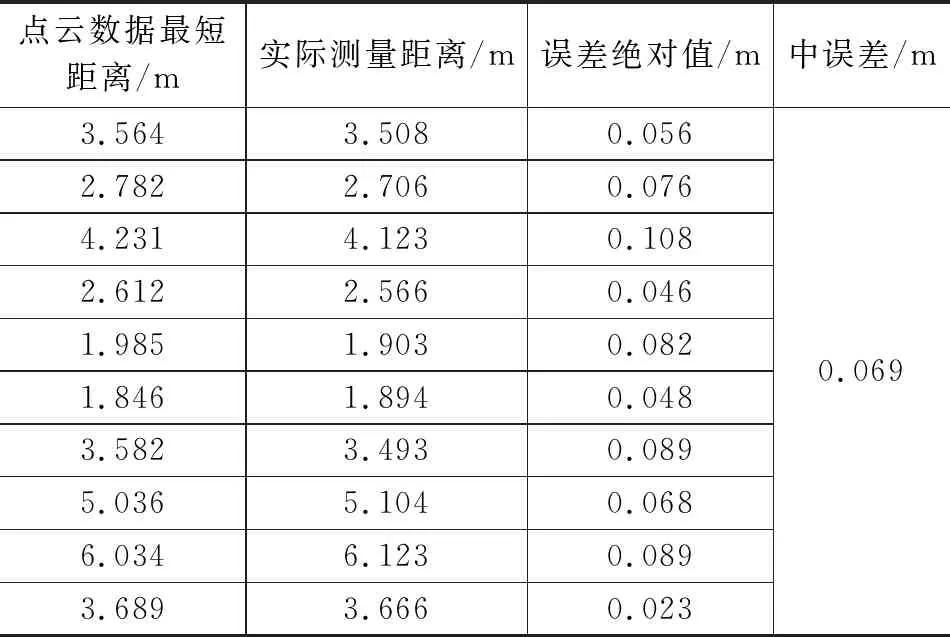
表7 左右側目標車輛感知比對數據
2.3 實驗結果與分析
通過對4個模塊實地性能測試數據進行分析,可得到以下結論:
1)對于車載運動測量與組合定位系統模塊,在車輛通過內插與INS融合后采樣頻率取100 Hz情況下,比對各個時間戳下的待測組合定位系統與已標定的基準定位系統之間的坐標誤差,求取中誤差即定位精度為0.092 4 m,測試時段內誤差最大值為0.171 4 m,最小值為0.024 6 m,采用RTK技術的定位精度優于0.1 m;其次,在定位速度方面,求取平均速度中誤差即速度精度為0.055 6 m/s,其中誤差最大值為0.083 m/s,誤差最小值為0.028 m/s,因此速度精度優于0.1 m/s。兩者的波動均在合理范圍內,證明車載運動測量與組合定位系統模塊的精度滿足整體需求。
2)對于車載踏板與方向盤位移傳感器模塊,緩慢踩踏油門過程中油門踏板位移呈現線性增長趨勢,變道過程中的方向盤位移量符合現實駕駛邏輯,表明該模塊能夠精確采集駕駛員的加速、剎車、變道、轉向等各類駕駛行為數據。
3)對于雷視道路多維感知一體機模塊,采用雷視一體機測量前后側目標車輛的感知誤差最大值為0.475 8 m,最小值為0.013 6 m,總體精度優于0.3 m,滿足識別精度要求。
4)對于32線激光雷達模塊,采用激光雷達測量左右側目標車輛的感知誤差最大值為0.108 m,最小值為0.023 m,總體精度優于0.1 m,表明該模塊能夠較為精確地通過點云檢測周圍環境車輛與本車間距離,并同時生成高精度的點云數據,且該測試系統的有效感知范圍大于150 m。
5)上述4個模塊的測試數據可同步輸出,每個數據文件均包括定位系統時間戳,通過時間戳對齊的方式可實現數據的實時匹配。
3 交互界面與功能設計
3.1 軟件系統基本功能
在進行道路交通環境與駕駛行為數據同步采集系統設計開發時,所運用的上位機子系統軟件應當具有如下特征與功能:
1)軟件系統登錄、退出界面:用戶可以根據數據庫中儲存的用戶名及密碼,輸入相應信息后即可進入軟件系統界面,隨時打開或退出程序。
2)簡潔的用戶交互界面:登錄成功打開上位機程序界面后,可以看到簡潔明了的用戶交互界面,各個圖表、說明文字、按鈕、滑動塊精確且易讀的表現形式,給用戶帶來至簡的體驗感與清晰的指引,根據界面上的各個按鈕自主選擇需要查看的模塊數據信息,交互形式通常是便于理解和操作的形式,以單擊和拖拉為主,降低用戶思考時間,在使用方面較為便利。
3)數據結果可視化展示:基于下位機各采集模塊采集獲得的慣導與定位數據、傳感器數據、雷視多維感知數據和激光點云數據,用戶可以自主選擇TCP和時段文件流兩種文件讀取形式,根據用戶反饋的需要,實時動態更新地顯示各模塊源數據對應的分析與標定結果,各數據及其對應標簽排列整齊簡潔明了地展示在系統界面中,相應的圖表實現了可拖拽、可縮放功能并且能夠自行調節文件讀取速率,從而直觀查看各個時段的數據變化規律,每一幀的數據源格式在讀取的同時展示在信息板上,實現了一一對應。
3.2 系統登錄
本系統在Ubuntu18.04下采用基于C++的QT Creator 5.10.0進行上位機軟件的總體設計。系統運用了Socket網絡編程、TCP/IP協議以及多線程同步等技術。其中系統的登錄界面如圖7所示,其中用戶信息管理與數據庫相連接。

圖7 系統登錄界面
3.3 總體設計開發
該平臺開發內容包含前端交互式UI設計與后端數據流傳輸,其中前端UI繼承了QCustomPlot(QCP)類,調用QCP::iRangeDrag和QCP::iRangeZoom類函數實現在Qwidget控件中以可拖拽、可縮放的圖表實時繪制駕駛模擬數據;使用QLabel和QTextBrowser捕獲并展示每幀數據各個字段的對應值。后端開發部分將行車影像與數據幀時間戳完成同步,將數據幀的各個字段逐一解析并放入對應的QVector中,最后完成各個子模塊Signal-Slot函數的編寫。
3.4 車載運動測量與組合定位系統模塊
圖8所示為車載運動測量與組合定位系統模塊的上位機界面,右下側為下位機子系統傳輸的16進制報文用上位機程序轉換為NMEA-0183數據格式后,采用其中“GNGGA”協議語句,并將輸出的每一幀間隔100 ms的帶有同步時間戳的GPS數據以數據流的形式展現在界面上;右上側為數據解讀界面,將實時顯示車輛的經緯度、速度、三軸加速度、姿態角等信息;左側為數據可視化界面,以折線圖的形式實時顯示車輛的速度、定位偏差、經緯度偏差和姿態角偏差信息。其中數據傳輸方式分為文件傳輸與TCP/IP協議傳輸,前者用于導入已采集完成的GPS數據,后者用于在采集過程中實時解析由CAN總線發送的報文字段。
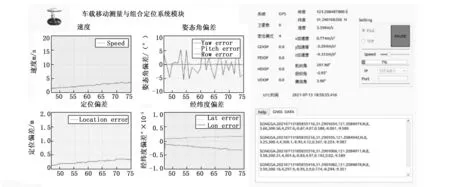
圖8 車載移動測量與組合定位系統界面
3.5 車載方向盤與踏板位移傳感器模塊
圖9為車載踏板與方向盤位移傳感器模塊的上位機界面,右下側的每一幀數據為某一固定時刻位移傳感器模擬量經過I/O轉換模塊轉換后輸出的位移原始量及經過歸一化預處理標定后的修正量;上側為數據可視化界面,實時顯示位移傳感器標定后的修正量,有助于更直觀地判斷駕駛人的踩踏油門踏板與轉動方向盤的頻率與幅度。
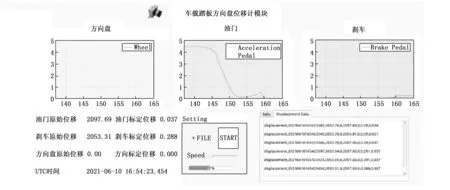
圖9 車載方向盤與踏板位移傳感器系統界面
3.6 雷視道路多維感知一體機模塊
圖10為雷視道路多維感知一體機模塊的上位機界面,右下側為下位機子系統傳輸的雷視目標檢測結果數據流;右上側為數據解讀界面實時顯示視頻識別獲得的目標類型(分為機動車、非機動車與行人)、目標的大小(依次為大型車、中型車、小型車)、目標的車牌號碼及車牌顏色、目標的縱向與橫向速度、目標相對于相機的X、Y偏移、事件的觸發狀態、觸發的事件類型和雷達的活躍狀態。在實時輸出目標參數的同時,在左側界面顯示同一時間戳下抓拍的實時影像,便于協助判斷目標當前狀態。
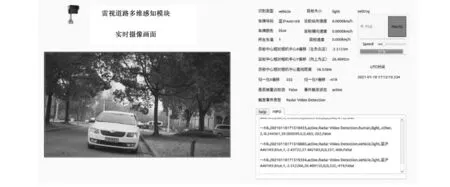
圖10 雷視道路多維感知一體機系統界面
3.7 鐳神32線激光雷達模塊
圖11為鐳神32線激光雷達模塊的上位機界面,利用基于C++的Pcl點云動態鏈接庫與QT相連接,在左側實時可視化每一幀的Pcd格式點云數據,且點云數據可與車載運動測量與組合定位模塊相融合,根據慣性模塊的三軸姿態角數據對點云進行坐標系轉換,最后構建出完整的道路三維點云場景。
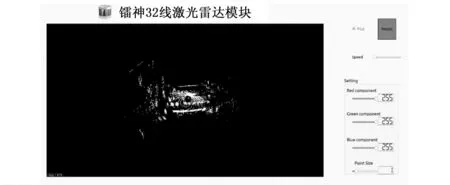
圖11 鐳神32線激光雷達模塊系統界面
4 結束語
本文針對多方位多角度的交通信息數據采集任務,通過總結相關需求,設計與開發了一款可移植的道路環境數據與駕駛行為同步采集系統,該系統的各個數據采集模塊具有高度靈活性與普遍適用性,可移植于小汽車、貨運車輛、客運大巴等多種車輛類型,系統集成了多模塊數據采集、儲存、傳輸、標定與可視化等功能,支持多項交通數據采集任務的并行處理,且融合了駕駛人本身的駕駛行為作為依據。為證明其適用性,本文對下位機子系統的4個模塊分別進行了系統測試,證明了其測量精度的可靠性,驗證結果表明該系統采集精度能夠滿足多方位交通數據自動化采集的總體需求。上位機子系統中融合了4個模塊的用戶交互界面,并完成了模塊間的時間同步,各數據信息簡潔明了地展示在系統界面中,相應的可視化圖表實現了可拖拽、可縮放功能并且能夠自行調節文件讀取速率,從而直觀查看各個時段的數據變化規律,具有較高的應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
