LoRa無線傳輸技術在智能防溺水系統中的應用
2024-05-19 14:11:46李玉香全劉輝澹臺夢陽
電腦知識與技術 2024年9期
李玉香 全劉輝 澹臺夢陽
摘要:現有的智能防溺水系統中,無線傳輸技術多采用Wi-Fi或藍牙方式。然而,這兩種無線傳輸方式存在傳輸距離短、穩定性較差、功耗較高等問題,導致系統只能在特定小范圍內使用。這無法有效保障戶外野生水域游泳者或工作人員的安全。同時,更穩定的通信方式如水聲通信、光通信、電磁波通信和磁通信,存在天線尺寸巨大、通信速度慢等問題。為此,該研究旨在探索LoRa無線傳輸技術在智能防溺水系統中的應用。通過將該技術應用于智能救生手環和自動救生船上,實現求救者心率情況和定位坐標的快速傳輸,從而提高救援效率和準確性。研究證明了LoRa無線傳輸技術在智能防溺水系統中的重要作用。該系統為溺水事故救援提供了高效、準確的解決方案,有望在實際應用中發揮重要作用。未來的研究可以進一步優化系統性能,并考慮其他相關因素,以提升整體救援效果。
關鍵詞:LoRa;無線傳輸;防溺水
中圖分類號:TP393? ? ? 文獻標識碼:A
文章編號:1009-3044(2024)09-0093-03
開放科學(資源服務)標識碼(OSID)
0 引言
游泳安全問題長期困擾著社會,然而,目前市場上許多水上智能救生設備仍不夠成熟,其中集成了各種傳感器并具備通信傳輸功能的設備屬于少數。傳統的防溺水手環通常需要溺水者手動打開充氣閥,但在緊急情況下,溺水者可能因情緒激動或操作不當[1]而無法進行該操作,從而導致救生手環失去作用。同時,現有的水中通信多采用Wi-Fi或藍牙方式進行數據傳輸[2-3],但這兩種方式受到傳輸距離短、傳輸穩定性差等問題的限制,使得智能防溺水手環僅適用于小范圍內的游泳場所,對于河邊、水庫等大型水域的游泳者或水上工作者在遇險時無法提供有效的支持。與之相對的高要求是使用水聲通信、光通信、電磁波通信和磁通信等更穩定的通信方式,但其存在天線尺寸巨大、通信速度慢以及時延長等問題[4],且大尺寸天線不適合游泳者佩戴,進而影響了使用范圍。
國外在溺水檢測方面的研究已經歷時近40多年,已經從探索和實驗階段逐步步入產品改進階段,然而我國在這一領域的研究仍處于相對初級階段。早在1976年,美國Codina,Jorge G.I131申請了專利“游泳池報警”,但受限于當時的科技水平和計算機發展,該技術并未受到廣泛關注和應用。2001年,法國VisionIQ公司開發了“海神號”溺水檢測系統,該系統通過在泳池天花板和水下壁面安裝紅外線鏡頭RGB相機實現了對游泳者準確位置的定位,從而實現了泳池實時溺水檢測的功能。然而,水下攝像頭的維護成本十分昂貴,一套“海神號”系統的安裝及維修費用折合人民幣數百萬元[5]。所以。因此,這種溺水檢測系統無法實現大規模普及,而本項目研究的系統則具有價格低廉、操作簡便等優點,更具實用價值,也更有利于推廣和應用。
美國的Kingii[6]是一款輕便且易于攜帶的水中緊急救生手環,其原理是在手環上裝配了一個救生氣囊,佩戴者在遇險時拉開卡扣,救生氣囊便會彈出,為佩戴者提供一定浮力,以保持頭部露出水面。然而,由于氣囊需要佩戴者手動拉開卡扣,部分溺水者在遇險時可能受驚而無法完成這一操作[7],導致手環失去了其應有的功能。
針對上述問題,本研究采用了一種新型的無線傳輸方式,即LoRa(長距離低功耗射頻通信)無線傳輸技術,并結合了GPS定位技術、心率監測技術等相關方法。通過在智能救生手環中嵌入LoRa模塊和心率傳感器,并在自動救生船上配置接收設備,建立起了“多對一”的通信系統,實現了求救者心率情況和GPS定位坐標的實時獲取與傳輸。
1 智能防溺水系統概述
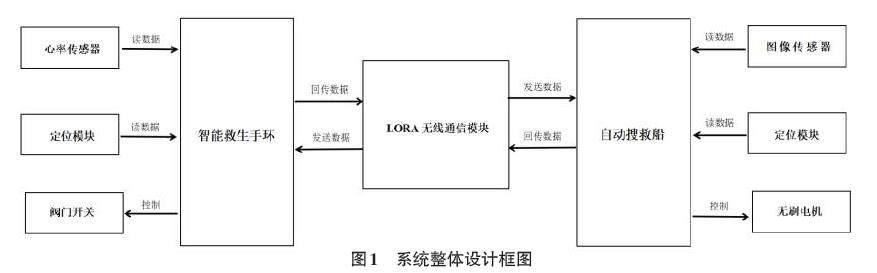
智能防溺水系統主要由兩部分組成:智能救生手環和自動搜救船。其中,救生手環包括心率傳感器、自動救生氣囊、無線傳輸模塊和GPS定位模塊等。該手環通過實時監測佩戴者的心率變化來判斷是否發生溺水情況,一旦發生緊急情況,手環將自動彈出安全氣囊,并通過LoRa無線通信模塊傳輸求救信號和GPS定位數據等信息至救生船。救生船在接收到求救信號后將自動駛向溺水者附近進行救援。該系統的框圖如圖1所示。LoRa無線傳輸技術的應用使救生手環與救生船相結合,為智能防溺水系統提供了更廣闊的信息覆蓋面,從而使自動救援船的救援范圍大大提高,實現了物物之間的交互,使得手環更加智能、傳輸更加穩定、救援更加高效。
2 救生手環選用LoRa無線通信技術的原因
LoRa[8]無線傳輸技術是一種適用于物聯網設備的低功耗廣域網(LPWAN) 通信技術,在智能救生手環上具有廣泛的應用及各種優勢。
首先,LoRa技術的一大優勢是其長距離傳輸能力。該技術能夠在城市和鄉村等廣闊范圍內傳輸數據,甚至在障礙物密集的環境下也能有良好的覆蓋。這使得智能救生手環可以通過LoRa網絡與救生設備進行遠程通信,實時傳輸手環的位置信息、健康數據等。
其次,LoRa技術采用了低功耗設計,能夠延長智能救生手環的電池壽命。相比于傳統的無線通信技術,LoRa在傳輸時僅需要較低的發射功率,因此能夠大幅降低能耗。對于智能救生手環而言,長時間的電池壽命至關重要,以確保在緊急情況下能夠持續地監測和傳輸數據。
另外,LoRa技術在連接密度方面也具有優勢。LoRa網絡能夠支持大規模設備的連接,因此可以實現多個智能救生手環同時連接到同一個基站或網關。這對于大規模應用和集中監控非常有用,比如在大型活動、災難現場或其他緊急情況下,可以監測和管理大量的智能救生手環。
最后,LoRa技術還具有良好的抗干擾性和可靠性。由于采用了擴頻調制技術,LoRa信號在抵抗干擾和衰落方面表現出色。即使在多路徑衰落環境中,LoRa技術也能保持穩定的連接和高質量的數據傳輸,確保智能救生手環的信息能夠準確、可靠地傳輸。
綜上所述,LoRa無線傳輸技術在智能救生手環上的應用具有長距離傳輸、低功耗設計、高連接密度和良好的抗干擾性等優勢。這些優勢使得智能救生手環能夠遠程監測和傳輸重要的健康數據,提供更好的安全保障。
3 LoRa協議的三種工作模式
LoRa模塊有三種工作模式,分別為ClassA模式、ClassB模式和ClassC模式,這三種工作模式各有優劣,類A工作模式適用于低功耗和實時性要求不高的設備,類B工作模式提供了更好的實時性,適用于更高的實時性應用場景,而類C工作模式則適用于對實時性要求非常高的應用場景。具體如下:
1) ClassA模式:該模式是最常見且最基本的工作模式,網絡中的設備具有雙向通信能力,但通信時間由設備來控制。該模式下的設備功耗較低,適合于電池供電的設備。
2) ClassB模式:該模式在ClassA工作模式的基礎上增加了基站的定時廣播。基站會定期廣播一個時間同步信標,設備可以根據該信標調整自身的接收時間窗口。相比類A工作模式,該模式在實時性方面有所提升,更適用于對實時性要求較高的場景。
3) ClassC模式:該工作模式最具靈活性但也面臨最高的功耗問題。在該模式下,設備的接收窗口幾乎始終打開,可以實時接收基站的數據。該模式需要更穩定的電源進行供電,然而,由于本系統手環無法提供穩定電源,故不選擇此方案。
綜上所述,本系統采用了ClassB的工作模式,具有較好的實時性和較低的功耗,能夠一定程度上保證系統的電池續航和數據傳輸實時性。
4 LoRa無線通信技術在智能防溺水系統中的應用
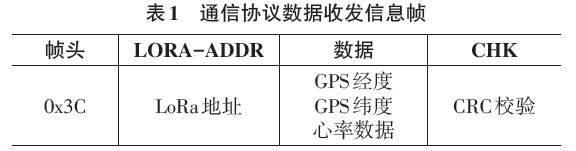
智能手環必須將佩戴者的定位信息發送出去,救生船才能知道有求救信號并展開救援,因此信號的穩定傳輸至關重要。智能手環監測節點、網關和節點采用星形組網,數據傳輸方式采用數據幀模式。為了保證數據的可靠性和實時性,采用CRC算法對數據幀進行校驗。LoRa無線通信模塊的通信協議數據收發信息幀如表1所示。
在信息幀中,各數據的作用如下:
1) 幀頭:作為一個信息幀開始的標志,設備識別到該代碼后將后面的數據提取出來,進而對數據進行解析。
2) LORA-ADDR:用于區分不同的LoRa控制節點的標志,每個節點都有唯一的設備地址。當手環遇到危險情況并傳輸求救信號等數據時,網關能夠識別該網關網絡下的設備,并在云平臺精準定位到該節點。
3) 數據:包括手環GPS定位到的經緯度以及佩戴者的心率數據。
4) CRC校驗:循環冗余校驗,在發送端的最后一位加上校驗碼。接收端在接收到一幀信息后先對其進行校驗判斷,判斷是否能夠被整除。若不能整除,則信息不完整,丟棄;反之,若能整除,則信息完整正確。
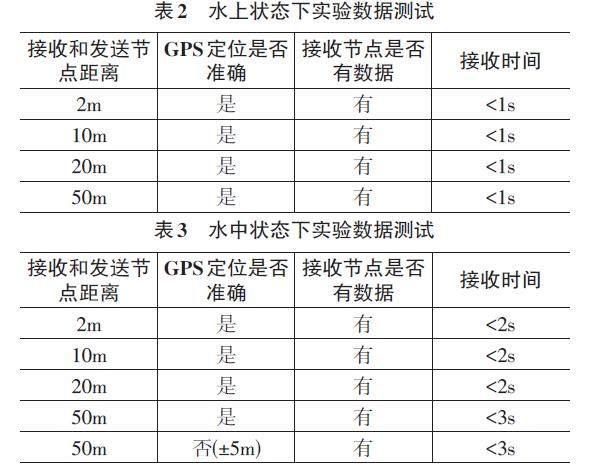
LoRa模塊主要有三種運行模式,分別為發送、接收和空閑。手環主要處于發送狀態,救生船主要處于接收狀態,在沒有報警信號的情況下,它們都處于空閑狀態。當救生船接收到其他節點發送來的數據時,會向單片機發送中斷請求,單片機對數據進行處理分析,并控制救生船移動到目標點進行救援。現對手環節點分為水中和水下兩個狀態進行分析,觀察LoRa的數據傳輸及GPS定位是否準確。詳細信息如表2、表3所示。
綜上測試可知,處于水面上時,LoRa傳輸速度快且GPS定位準確。而處于水下狀態時,GPS定位可能不準確,但是LoRa的數據傳輸仍然能進行,只是傳輸速度相對慢了些,但不影響整體系統的正常運行。因此,采用LoRa進行手環與救生船之間的信息傳輸是可行的方案。
5 結束語
本設計針對現有救生手環多處于非智能化狀態的問題,設計并研究了一款基于LoRa通信傳輸的智能救生系統。該系統在手環上增加了定位裝置及通信設備,實現了與救生船之間的互聯,使得佩戴者遇到危險情況時不僅可以手動打開安全氣囊,還可以自動打開救生氣囊并向救生船發送求救信號和位置信息等。救生船主節點接收到求救信號后,根據接收到的位置信息移動船體使之靠近目標節點。這既使得救生手環實現了智能化和自動化,又進一步提高了救援效率。
參考文獻:
[1] 操作不當防溺水手環難救命[J].發明與創新(大科技),2018(6):16.
[2] 惠鵬飛,鄒立穎,周健.基于STM32的藍牙無線多功能智能手環設計[J].高師理科學刊,2023,43(11):27-31,38.
[3] 何向陽,劉彬.基于物聯網技術的智能防溺水系統設計與實現[J].電子制作,2023,31(21):93-96.
[4] 范澤國.基于磁感應的水下無線通信技術研究[D].哈爾濱:哈爾濱工業大學,2021.
[5] 喬羽.基于Mask R-CNN泳池中溺水行為檢測系統的設計與實現[D].青島:青島大學,2019.
[6] 袁彬.手腕上的保護神[J].中學生百科,2016(33):2.
[7] 為什么受到驚嚇時大腦會一片空白[J].科學大眾(中學生),2020(5):3.
[8] 趙文舉.低功耗廣覆蓋LoRa系統的研究與應用[D].北京:北京郵電大學,2019.
【通聯編輯:謝媛媛】
