單旋翼無人機植保作業系統的研制與實驗研究
2024-05-27 13:58:13趙洪光滕文建
科技資訊 2024年1期
關鍵詞:無人機
趙洪光 滕文建
關鍵詞: 無人機 植保 單旋翼 噴灑作業
中圖分類號: S224.3 文獻標識碼: A 文章編號: 1672-3791(2024)01-0009-06
近年來,不合理的種植方式和不科學的施肥習慣使農作物的病蟲害越來越嚴重,而在病蟲害防治過程中,噴灑農藥的勞動強度大、作業頻次高,使機械化病蟲害防治作業成為越來越重要的植保方式。這種方式可以從而促使機械化病蟲害防治技術快速發展。植保無人機成為現代農業航空技術應用的一個重要領域[1]。
在病蟲害防治的機械化發展過程中,固定翼飛機植保技術受限于建設專用機場和跑道,不利于推廣。多旋翼無人機植保系統具有重量輕、操作靈活、適應性強的優點,但起降頻繁且需要專業無人機操控人員的特點,限制了病蟲害防治機械化的高效性[2-3]。單旋翼輕型無人機經過改進后,載重量大、工作效率高且能實現自動化控制的飛行方式,能有效提高病蟲害防治機械化的效率。
北京大運通航科技有限公司經過市場需求和現有產品的調研,聯合618所、54所共同研制了載藥量180 kg的單旋翼無人機植保作業系統,并進行了飛行實驗和噴灑實驗研究。DP180 型單旋翼無人機植保作業系統實現了植保作業過程中飛行和噴灑的全自動化,改善了我國目前施藥技術落后、農藥有效利用率低、施藥作業效率低等關鍵問題。
1 DP180 型單旋翼無人機植保作業系統的研制
1.1 作業任務設計
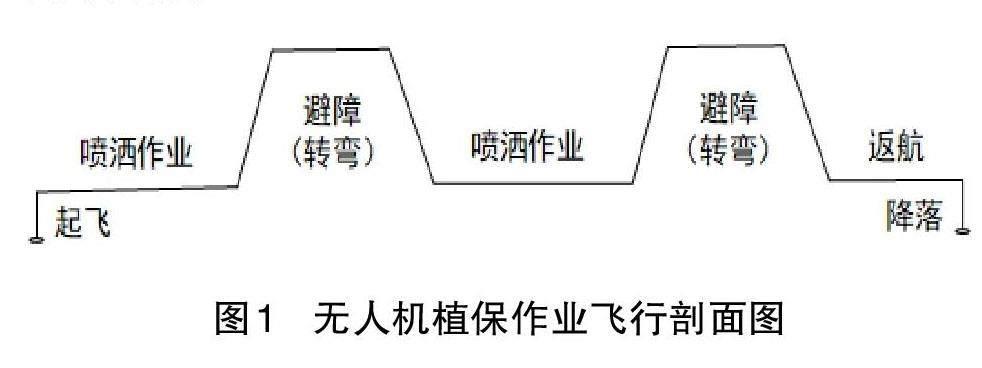
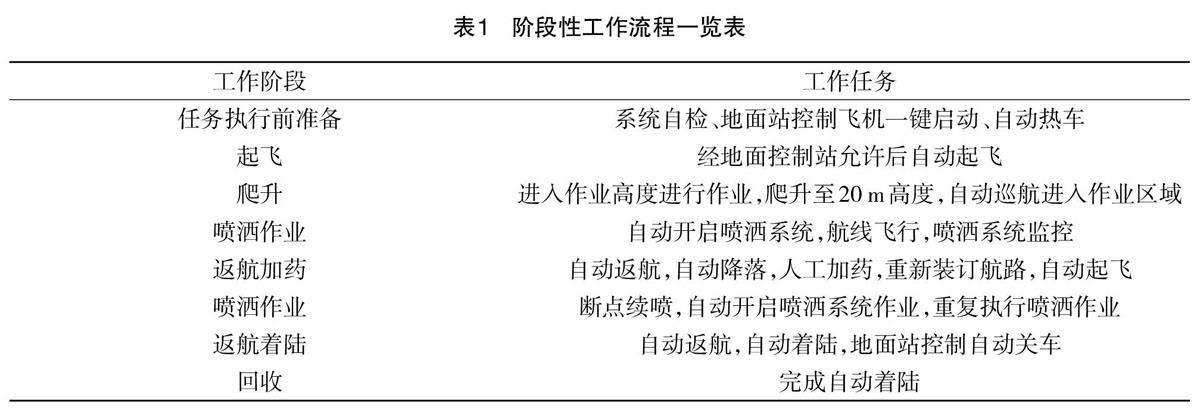
根據無人機植保作業剖面圖(如圖1 所示)來設計DP180 型單旋翼無人機植保系統的噴灑作業流程,具體如表1 所示。
根據作業流程,DP180 型單旋翼無人機植保系統實現啟動、預熱、起飛、飛行、噴灑作業、加藥和返航等全過程無人工干預的自動飛行作業。
1.1.1 啟動
飛行控制操作手通過地面站系統一鍵啟動控制直升機發動機啟動,副飛行控制器啟動用作手動飛行控制的備份。
1.1.2 發動機預熱
發動機啟動后進入怠速狀態,飛機狀態正常,飛行控制系統自動控制發動機進入2 000 RPM 保持預熱狀態。隨著發動機滑油溫度、滑油壓力、氣缸溫度達到要求,飛機發動機進入額定狀態,如果系統狀態正常,則達到起飛狀態準備起飛;如果系統不正常則返回錯誤狀態信息。
1.1.3 起飛
無人機達到允許起飛狀態后,可接收地面站的起飛指令自動起飛。
1.1.4 飛行
無人機根據預設的航線及噴灑任務,依次完成加速、爬升、減速、下降、回轉等飛行,自主機動達到任務區域并保持作業高度。
1.1.5 噴灑
噴灑作業包括自動噴灑、巡航和返航,無人機到達作業區域后,飛行控制系統打開噴灑系統進行噴灑作業。在通信距離極限內可完成自動爬升、協調轉彎、下降并重新進入作業區域進行噴灑作業。在噴灑系統藥量用盡之后,飛行控制系統根據返航指令,自動計算返航路線。
1.1.6 加藥
無人機返航達到加藥點后自動降落,可進行不停車加藥,待飛行狀態一切正常后,重新執行噴灑作業流程。在無人機降落、加注農藥、加注燃料過程中,地面航跡規劃軟件重新計算飛行航跡后注入航線,完成后續噴灑作業任務。
1.1.7 返航
無人機完成噴藥任務后自動返航、降落、停車。
1.2 整體系統設計
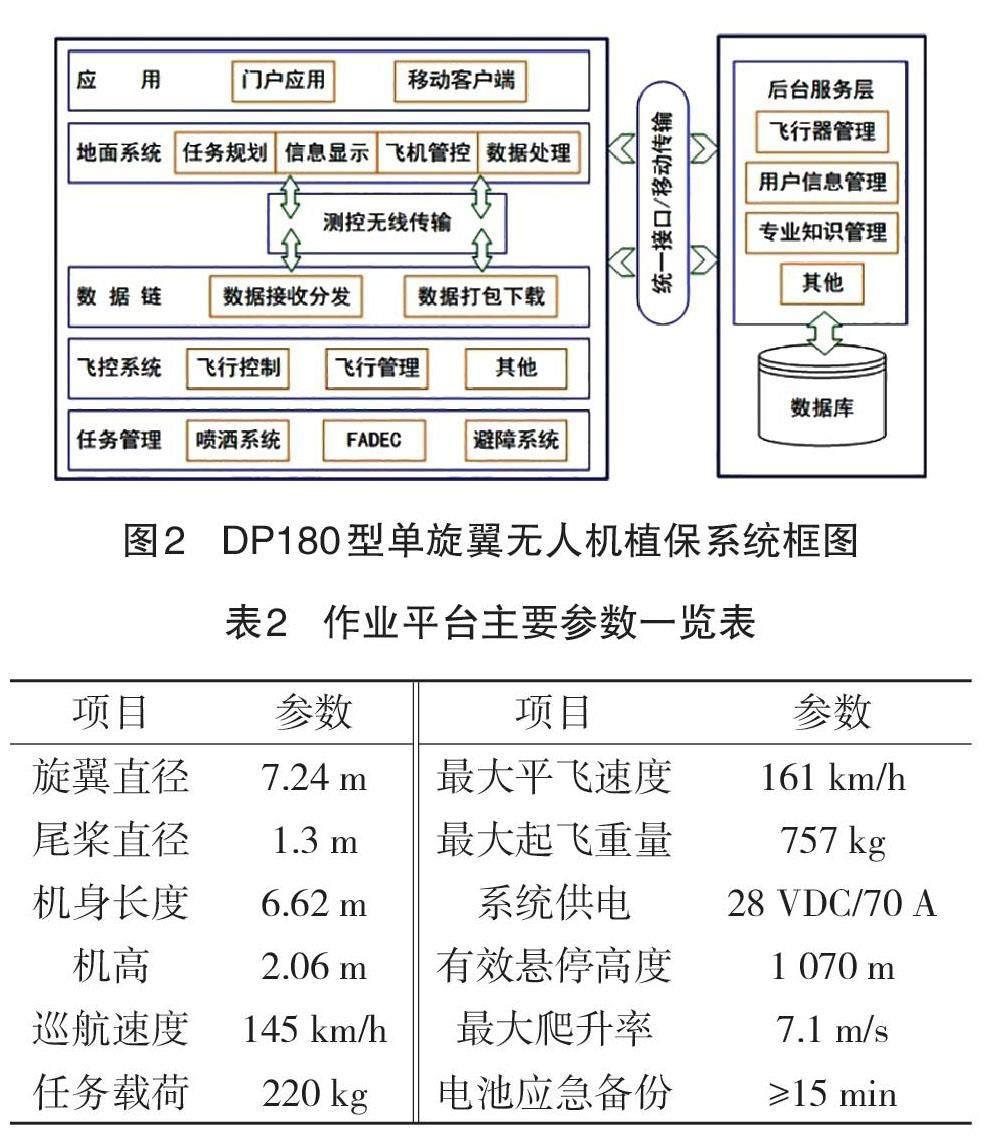
DP180 型單旋翼無人機植保系統主要包括無人機作業系統與后臺服務系統兩大部分,作業系統包括作業平臺、飛行控制、數據鏈路、地面站系統、系統應用;后臺服務系統包括飛行器管理、用戶信息管理、專業知識管理、大數據業務。系統框圖如圖2 所示。
1.3 作業平臺的研制
1.3.1 作業平臺的功能及組成
作業平臺是為植保作業提供可靠、穩定的飛行平臺,為各種任務載荷提供電力支持,為噴灑設備提供有效載荷,為飛行控制、鏈路測試設備提供掛載平臺。作業平臺結構采用模塊化設計,能便捷地進行維修和維護操作。
作業平臺的動力傳動采用1 臺功率180 HP 的萊康明IVO-360 活塞發動機,并通過改裝提升了發動機的馬力。主旋翼系統采用兩段式設計,能實現快速、便捷地維護和拆卸。主供電系統采用1 臺AL24-P70 發電機,供電能力為28 Vdc/70 A。
1.3.2 作業平臺的主要指標參數
作業平臺的主要指標參數具體如表2 所示。
1.3.3 發動機控制系統
為實現發動機的一鍵啟動功能,對發動機各個狀態的參數進行完整的監控與分析,同時建立了發動機的全權限數字電子控制系統(Full Authority Digital EngineControl,FADEC)。在飛行控制系統的配合下,FADEC 主要實現以下功能:冷車、預熱狀態下一鍵啟動,發動機混合比的控制,油門的聯動控制,發動機的數據存儲與維護支持等。
FADEC 系統主要由發動機控制單元、油門及各傳感器、被控組件,以及它們之間的電氣線路組成。FADEC 根據不同的飛行狀態和動力需求來調整發動機工況,系統框圖如圖3 所示。
1.4 飛行控制系統研制
1.4.1 飛行控制系統功能
飛行控制系統功能包括發動機控制、穩定飛行控制、機動軌跡控制、程序控制以及飛行管理。
(1)發動機控制。飛行控制系統設定了地面和空中兩種基本狀態,通過反饋停車、怠速、預熱和額定4種狀態下發動機的轉速范圍,確定發動機是否工作正常,是否在額定狀態工作正常。飛行控制系統進一步對發動機相關的傳感器進行控制,配合平臺電氣系統對電氣控制。
(2)穩定飛行控制。飛行控制系統實現了9 種穩定飛行控制功能,包括三軸姿態保持(ATT)、速度給定與保持(VEL)、航向給定與保持(HDG)、高度給定與保持(ALT)、自動區域導航(NAV)以及位置給定與保持(PH)等。
(3)機動軌跡控制。飛行控制系統實現了9 種機動軌跡控制功能,包括起飛、著陸、加速、減速、爬升、下降、回轉、左盤旋、右盤旋。
(4)程序控制。根據典型任務剖面,實現了從起飛到懸停到航線飛行到進場到著陸的整個階段的全自動控制飛行,并實現了不停車加藥后的復飛作業。根據不同的飛行階段,實現了包括航點管理、航線管理、導航計算等多項工作,并啟動相應的工作模式,根據舵機指令,控制飛機按照預定航線飛行。
(5)飛行管理。飛行控制系統的飛行管理包括以下內容:對直升機狀態參數、發動機參數及機載設備參數采集與計算;飛行控制系統與管理系統故障檢測;對機載電氣設備故障檢測,測控與信息傳輸設備進行監控和管理,飛行參數、故障信息、關鍵狀態的實時記錄,對機載噴灑系統進行控制與禁航區管理。
1.4.2 飛行控制系統組成
飛行控制系統組成具體如圖4 所示。
1.4.3 飛行控制系統主要參數
飛行控制系統主要參數具體如表3 所示。
2 實驗結果與分析
本實驗于2022 年7 月14 日到8 月6 日在孟州市黃河灘農場進行,實驗機型DP180 型單旋翼機無人機(如圖5 所示)。實驗對無人機進行作業模式、噴灑效果與噴灑幅度、航線控制精度、地面耗時測試。
2.1 無人機作業模式的測試
無人機需要快速完成飛行姿態的調節[4],飛行操控模式采用飛行控制操作員利用地面設備以“指令方式”控制飛機飛行,根據轉彎方式不同分為懸停位置遙調(飛機定點180o轉彎后進行位置遙調,然后進入預設航線飛行)、懸停帶速度轉彎(飛機定點轉彎145o后進行加速且給定航向切入預設航線飛行)、協調轉彎(飛機帶速度轉彎飛行)。從表4 的數據看出,懸停位置遙調所用的時間最少,因此無人機噴灑測試選擇懸停位置遙調方式進行飛行測試。
2.2 飛行速度對噴灑效果與噴灑幅度的影響
重載荷會嚴重影響植保無人機的穩定飛行,嚴重降低噴施作業的覆蓋率和均勻度[5]。風是影響飛機飛行軌跡和飛行姿態的主要因素[6]。需要對噴施作業進行覆蓋率和均勻度試驗。單旋翼無人機飛行高度保持7 m,風速為0~1 m/s時,分別測試飛行速度10 m/s、12 m/s、15 m/s時對噴灑效果與噴灑幅度的影響。噴灑實驗時,提前布置水敏紙霧滴測試卡,間距設計為1 m 并記錄編號,噴灑結束后,晾干測試卡,利用DepositScan 軟件對霧滴覆蓋率和霧滴密度進行分析。測試卡試樣具體如圖6~圖8 所示。
根據《農業航空作業質量技術指標》(MH/T 1002.1-2016)第1 部分:噴灑作業中關于作業質量技術的要求,當飛行速度為10 m/s時,滿足常量噴灑的有效噴灑幅度12 m;當飛行速度為12 m/s 時,滿足常量噴灑的有效噴灑幅度9 m;當飛行速度為15 m/s時,不滿足任何類型噴灑質量技術指標。因此,同樣的條件下,隨著飛行速度的增加噴灑幅寬逐步減小。
2.3 風速對噴灑效果與噴灑幅度的影響
從表5 數據可以看出,保持同樣的作業高度和作業速度時,在合適的風速下可以滿足常量噴灑標準,但風速對噴灑效果影響比較大。因此,在進行噴灑作業時,要充分考慮風速的影響。
2.4 航線控制精度的測試
從表6 數據可以看出,當飛機穩定速度飛行時,飛機航線控制精度維持在±11 m 的偏距,推測由飛機航向保持精度誤差引起,需進一步提高航向保持精度誤差;當飛機加速、減速飛行時,飛機航線控制精度也出現較大偏差,推測加減速是飛機姿態不穩定因素與機航向保持精度誤差共同作用的結果,需進一步提高飛機不同姿態轉變的穩定性。
3 結語
無人機作業模式的實驗表明,懸停位置遙調所用的時間最少,飛行模式應選擇懸停位置遙調模式。飛行速度對噴灑效果與噴灑幅度的影響實驗表明,飛行速度不超過12 m/s 時,能夠滿足常量噴灑。風速對噴灑效果與噴灑幅度的影響實驗表明,由于飛行得較高,風速對噴灑效果影響比較大,在飛行高度7 m、飛行速度12 m/s、風速1 m/s 時,能夠滿足常量噴灑。航線精度控制實驗表明,受無人機姿態變化因素和航向保持精度的影響,航線控制精度不高,需要進一步提高精度。
綜合分析結果表明,單旋翼無人機植保系統能夠滿足植保時藥物的噴灑效果,大大提高了植保作業效率,增加的單架次作業區域,縮短了植保時間,減少了病蟲害對農作物的危害時間。單旋翼無人機植保系統的研制與實驗可為植保無人機的研究提供參考和指導。
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26