異構(gòu)多星電磁編隊(duì)靜態(tài)構(gòu)型設(shè)計(jì)與保持控制
2024-05-27 06:46:24蔡曜楊盛慶吳敬玉
宇航學(xué)報(bào) 2024年3期
關(guān)鍵詞:模型設(shè)計(jì)
蔡曜,楊盛慶,2,吳敬玉,2
(1.上海航天控制技術(shù)研究所,上海 201109;2.上海市空間智能控制技術(shù)重點(diǎn)實(shí)驗(yàn)室,上海 201109)
0 引言
衛(wèi)星編隊(duì)因?yàn)榭梢栽诳臻g中組合成更大尺度的虛擬航天器,完成以往單顆衛(wèi)星難以完成的任務(wù),近年來成為航天領(lǐng)域的研究熱點(diǎn)[1]。但基于動(dòng)量原理的傳統(tǒng)衛(wèi)星編隊(duì)需要消耗燃料實(shí)現(xiàn)相對位置保持,存在壽命受限、羽流污染等問題。針對這一問題,有研究[2]提出電磁編隊(duì)飛行(Electromagnetic formation flight,EMFF)是一種可行的解決方案。電磁編隊(duì)利用安裝在衛(wèi)星上的超導(dǎo)線圈,在星間產(chǎn)生電磁力實(shí)現(xiàn)編隊(duì)的相對位姿控制。電磁編隊(duì)僅消耗電能,具有更好的控制性能和更長的工作壽命,能夠形成更豐富的編隊(duì)構(gòu)型,在空間任務(wù)中具有廣闊的應(yīng)用前景。
電磁編隊(duì)動(dòng)力學(xué)建模的基礎(chǔ)是電磁力模型的選擇。精確電磁力模型[3]基于畢奧-薩伐爾定律,需要對線圈的每個(gè)電流微元進(jìn)行積分,沒有解析解,只能采用數(shù)值方法求解。雖然模型精確,但計(jì)算復(fù)雜度較大,在構(gòu)型設(shè)計(jì)與控制時(shí)直接使用存在計(jì)算量較大的問題。為了簡化精確模型,Schweighart[4]假設(shè)線圈半徑遠(yuǎn)小于線圈距離,對精確模型分別進(jìn)行泰勒一階和三階展開,得到了電磁力遠(yuǎn)場模型和中場模型,并簡要分析了線圈距離與半徑之比對模型誤差的影響。但該方法沒有對模型誤差與軌道攝動(dòng)量級進(jìn)行比較,忽略了模型誤差對編隊(duì)構(gòu)型保持的影響。而且無論是哪個(gè)電磁力模型,電磁力、電磁力矩、磁矩和相對位置都是高度耦合且強(qiáng)非線性的,這造成了電磁力求解的困難,也是電磁編隊(duì)研究的主要難點(diǎn)所在。為了在后續(xù)的構(gòu)型設(shè)計(jì)與控制中取得較為精確的結(jié)果,需要合理地設(shè)計(jì)與應(yīng)用電磁力模型。
電磁編隊(duì)的一個(gè)應(yīng)用方向是基于定常電磁力的靜態(tài)構(gòu)型設(shè)計(jì)。在靜態(tài)構(gòu)型下,編隊(duì)的穩(wěn)定條件是電磁力滿足相對平衡態(tài)方程,各星在Hill 系下處于相對靜止?fàn)顟B(tài),編隊(duì)整體類似單剛體航天器,穩(wěn)定且高精度的控制使得編隊(duì)能夠完成長焦X射線成像[5]、共位衍射成像[6]、紅外干涉成像[7]等空間任務(wù)。對于紅外干涉成像任務(wù),有研究為中國的覓音計(jì)劃提出利用四星編隊(duì)在日地L2 點(diǎn)組成四面體構(gòu)型的大口徑紅外干涉望遠(yuǎn)鏡的方案[8]。考慮到在深空中的編隊(duì)存在距離較遠(yuǎn)、難以維護(hù)的問題,如果能將此類任務(wù)布置在近地軌道上,將有利于航天器的長期維護(hù)。但傳統(tǒng)編隊(duì)在近地軌道上受地球中心引力影響,難以維持靜態(tài)構(gòu)型的長期穩(wěn)定。電磁編隊(duì)是一種實(shí)現(xiàn)靜態(tài)構(gòu)型的方案。
對于電磁編隊(duì)靜態(tài)構(gòu)型設(shè)計(jì)方法,早期Miller等[7]和Kong等[9]設(shè)計(jì)了五星編隊(duì)構(gòu)型,其中四星共線,一顆星位于線外。Hussein等[10]針對三星共面編隊(duì),設(shè)計(jì)了對齊、平行和環(huán)形3種磁矩配置模式。上述設(shè)計(jì)假設(shè)編隊(duì)位于深空,忽略了地球引力因素。而在近地軌道附近,構(gòu)型設(shè)計(jì)因?yàn)橐Φ拇嬖诙兊酶訌?fù)雜。黃渙[11]和徐良[12]先后采用Kane 方法和Hamilton 方法構(gòu)建電磁編隊(duì)姿軌動(dòng)力學(xué)模型,為雙星編隊(duì)設(shè)計(jì)了徑、切、法3 種構(gòu)型,并進(jìn)一步為三星編隊(duì)設(shè)計(jì)了共線和共面構(gòu)型。Qi等[13]在他們的基礎(chǔ)上進(jìn)一步研究了雙星編隊(duì)的不變流形。Wang等[14]針對N星編隊(duì),設(shè)計(jì)了法向共線構(gòu)型。總結(jié)這些研究發(fā)現(xiàn),靜態(tài)構(gòu)型設(shè)計(jì)的關(guān)鍵在于找到一組滿足相對平衡態(tài)方程的磁矩與位置參數(shù),使得各星在Hill 坐標(biāo)系下加速度與角加速度均為0。同時(shí)隨著衛(wèi)星數(shù)量的增加,電磁編隊(duì)的耦合參數(shù)與平衡態(tài)方程數(shù)目迅速增加,導(dǎo)致構(gòu)型設(shè)計(jì)難度也隨之加大。為了簡化問題,先前的研究通常利用同構(gòu)對稱性或空間降維等方式設(shè)計(jì)共線或共面編隊(duì),缺少了空間三維靜態(tài)構(gòu)型的設(shè)計(jì)。四星編隊(duì)是最小的空間立體結(jié)構(gòu),當(dāng)空間任務(wù)需要各個(gè)衛(wèi)星分布在三維空間中形成立體構(gòu)型時(shí),從四星編隊(duì)著手研究是個(gè)合理的選擇。為了不失構(gòu)型設(shè)計(jì)的一般性,研究多星異構(gòu)編隊(duì)。由于衛(wèi)星質(zhì)量不同,構(gòu)型缺少對稱性,這會(huì)進(jìn)一步加大構(gòu)型優(yōu)化設(shè)計(jì)的難度。
電磁編隊(duì)靜態(tài)構(gòu)型設(shè)計(jì)完成后,由于構(gòu)型不穩(wěn)定,需要設(shè)計(jì)編隊(duì)控制算法。電磁編隊(duì)控制可以分解為兩部分。第1 部分是根據(jù)狀態(tài)誤差求解控制力,可以采用常規(guī)的LQR 控制器[11]、滑模控制器[15]和魯棒控制器[16]等;第2 部分是根據(jù)控制力求解控制磁矩,可以采用的方法包括自由磁矩法[6]、最優(yōu)磁矩分配法[17]、同倫延拓法[18]等。對于遠(yuǎn)場模型誤差導(dǎo)致的控制力干擾問題,Ahsun等[19]和連克非等[20]均通過設(shè)定自適應(yīng)系數(shù),實(shí)現(xiàn)對控制力的實(shí)時(shí)補(bǔ)償。但這樣的方法是被動(dòng)的、基于狀態(tài)誤差的反饋補(bǔ)償,沒有根據(jù)精確電磁力模型從控制源頭主動(dòng)修正磁矩來消除誤差。對于近地軌道空間攝動(dòng)問題,主要攝動(dòng)包括地球非球形攝動(dòng)與衛(wèi)星面質(zhì)比異構(gòu)造成的大氣阻力攝動(dòng)等。上述的控制研究沒有利用電磁力實(shí)時(shí)高精度控制的特點(diǎn),沒有基于已知的相對攝動(dòng)模型進(jìn)行前饋補(bǔ)償。同時(shí),控制研究還應(yīng)考慮衛(wèi)星線圈異構(gòu)造成的最大磁矩不同,避免控制磁矩飽和問題。
本文主要研究異構(gòu)四星電磁編隊(duì)的空間立體靜態(tài)構(gòu)型設(shè)計(jì)與控制問題,建立了近地圓軌道附近的電磁編隊(duì)動(dòng)力學(xué)模型,分析了靜態(tài)構(gòu)型下影響編隊(duì)相對運(yùn)動(dòng)的主要干擾項(xiàng)。針對空間靜態(tài)構(gòu)型的設(shè)計(jì)問題,推導(dǎo)了編隊(duì)靜態(tài)構(gòu)型的必要條件,基于必要條件設(shè)計(jì)了一種參數(shù)降維的四面體構(gòu)型,提出了利用精確電磁力模型對靜態(tài)構(gòu)型進(jìn)行修正的方法。針對電磁編隊(duì)的相對控制問題,考慮了J2 攝動(dòng)與大氣阻力影響,設(shè)計(jì)了攝動(dòng)前饋結(jié)合滑模反饋的控制算法。數(shù)值仿真證明了四星空間靜態(tài)構(gòu)型設(shè)計(jì)算法、非線性修正和滑模控制器的有效性。
1 電磁編隊(duì)動(dòng)力學(xué)建模
1.1 相對運(yùn)動(dòng)的動(dòng)力學(xué)建模
四星電磁編隊(duì)系統(tǒng)如圖1 所示,由4 顆異構(gòu)電磁衛(wèi)星構(gòu)成,依次編號為1、2、3、4。每顆電磁衛(wèi)星上都裝有3 個(gè)互相垂直的圓形超導(dǎo)線圈,通電后能夠產(chǎn)生任意調(diào)節(jié)的磁矩,進(jìn)而產(chǎn)生星間電磁力和力矩,實(shí)現(xiàn)控制編隊(duì)的相對運(yùn)動(dòng)。設(shè)編隊(duì)系統(tǒng)質(zhì)心為OCM,ρi為衛(wèi)星i質(zhì)心相對OCM的位置矢量。
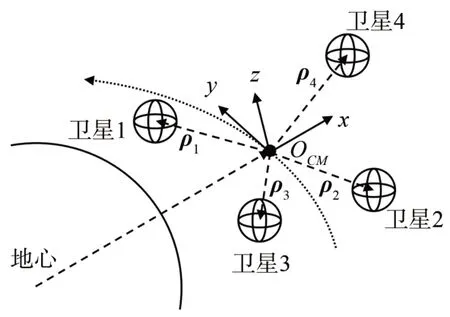
圖1 四星電磁編隊(duì)Fig.1 Four-satellite electromagnetic formation
對于近地軌道下的四星電磁編隊(duì),星間電磁力為編隊(duì)系統(tǒng)內(nèi)力,不會(huì)對系統(tǒng)質(zhì)心的運(yùn)動(dòng)產(chǎn)生影響。因此,可以將編隊(duì)質(zhì)心作為參考點(diǎn),建立Hill坐標(biāo)系O-xyz,原點(diǎn)O位于編隊(duì)質(zhì)心OCM,x軸指向地心反方向,z軸沿軌道面法向,y軸滿足右手法則。下文所有提到的各星相對位置、相對速度和相對加速度均是Hill坐標(biāo)系下關(guān)于編隊(duì)質(zhì)心的物理量。
假設(shè)星間距離遠(yuǎn)小于軌道半徑,則衛(wèi)星i的相對運(yùn)動(dòng)模型可以簡化為線性C-W方程:
式中:n為編隊(duì)質(zhì)心軌道角速度,ρi=[xi,yi,zi]T為相對位置矢量,fi=[fix,fiy,fiz]T為相對控制加速度,為相對攝動(dòng)加速度。
1.2 遠(yuǎn)場電磁力模型
電磁編隊(duì)研究中常假定線圈半徑遠(yuǎn)小于線圈距離,從而將精確電磁力模型近似為遠(yuǎn)場電磁力模型[4]。為便于區(qū)分,符號上標(biāo)EMF 表示基于遠(yuǎn)場模型,上標(biāo)EME表示基于精確模型,上標(biāo)EM表示兩模型均可。遠(yuǎn)場模型將線圈簡化為磁矩進(jìn)行計(jì)算,磁矩大小的計(jì)算公式為:
式中:μ為磁矩大小,方向與電流回路滿足右手螺旋定則;Nc為線圈匝數(shù);I為線圈電流大小;a為線圈半徑。磁矩方向與電流方向滿足右手法則。
衛(wèi)星i作用于衛(wèi)星j上的電磁力和電磁力矩分別為:
式中:μ0為真空磁導(dǎo)率;μi,μj分別為衛(wèi)星i和衛(wèi)星j的磁矩;ρij為衛(wèi)星j相對衛(wèi)星i的位置;ρij表示衛(wèi)星i、j距離大小。
根據(jù)遠(yuǎn)場模型,星間電磁力與距離的4 次方成反比,使得電磁力只適合維持近距離編隊(duì)。但在近距離情況下,遠(yuǎn)場模型忽略線圈半徑的前提條件不再成立,在靜態(tài)構(gòu)型編隊(duì)中使用遠(yuǎn)場模型會(huì)造成常值偏差。下文將建立精確電磁力模型,將電磁力誤差修正至零均值,作為編隊(duì)高精度控制的基準(zhǔn)。
1.3 精確電磁力模型
根據(jù)參考文獻(xiàn)[3],精確電磁力模型需要對兩星上各個(gè)線圈的電流微元積分得到,如圖2 所示。考慮到靜態(tài)構(gòu)型編隊(duì)中各星相對姿態(tài)保持不變,為簡化精確電磁力求解,假設(shè)衛(wèi)星姿態(tài)由反作用輪保持穩(wěn)定,衛(wèi)星的三軸線圈始終與Hill坐標(biāo)系三軸平行,忽略線圈厚度。

圖2 精確電磁力計(jì)算Fig.2 Exact electromagnetic force calculation
圖中:ai,aj分別表示衛(wèi)星i,j的電磁線圈半徑;記ix,jx分別表示衛(wèi)星i,j垂直x軸的線圈,s為線圈ix的電流微元相對于線圈jx的電流微元的位置矢量,分別表示線圈ix,jx的電流,分別表示線圈ix,jx的電流微元指向。
線圈ix作用于線圈jx上的電磁力和力矩為:
式中:kI為與衛(wèi)星i,j的線圈匝數(shù)Ni,Nj和電流Iix、Ijy相關(guān)的系數(shù);aj表示線圈jx中心指向其上電流微元的位置矢量;μix表示線圈ix產(chǎn)生的磁矩大小;μjx表示線圈jx產(chǎn)生的磁矩大小。
為近似求得精確電磁力數(shù)值解,將式(5)寫為:
式中:θix、θjx分別為線圈ix、jx上微元的角度,取值范圍為[0,2π]。
衛(wèi)星i作用于衛(wèi)星j上的電磁力和力矩為各線圈電磁力和力矩的線性疊加:
為檢驗(yàn)精確電磁模型數(shù)值計(jì)算方法的準(zhǔn)確性,設(shè)定兩星磁矩大小相同。在不同的磁矩配置模式下,如果隨著線圈距離的增大,遠(yuǎn)場模型與精確模型之間的求解誤差逐漸趨于0,則說明了精確電磁模型數(shù)值算法的準(zhǔn)確性。這里選取了4種磁矩配置情形,如圖3所示。
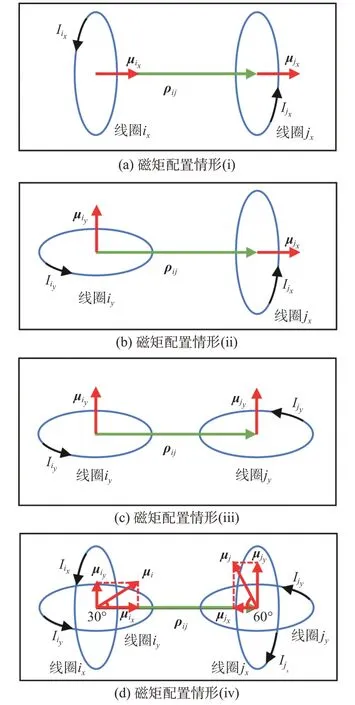
圖3 四種磁矩配置情形Fig.3 Four cases of magnetic dipole configurations
根據(jù)不同離散點(diǎn)數(shù)下的精確模型求解結(jié)果,設(shè)定線圈距離3 m,線圈半徑1 m,精確模型離散點(diǎn)數(shù)N=60 時(shí)的電磁力為真實(shí)電磁力,定義遠(yuǎn)場模型或精確模型的相對誤差為:計(jì)算得到的電磁力與真實(shí)電磁力之差的模長與真實(shí)電磁力模長的比值。繪制精確電磁力模型相對誤差與離散點(diǎn)數(shù)N的收斂關(guān)系,如圖4(a)所示。隨著離散點(diǎn)數(shù)增多,精確電磁力模型相對誤差逐漸減小,計(jì)算精度逐漸提高。另外可以發(fā)現(xiàn),情形(iii)、(iv)收斂速度較慢,原因主要在于各組微元距離變化較大,需要更多的離散點(diǎn)才能獲得較為準(zhǔn)確的計(jì)算結(jié)果。

圖4 精確模型與遠(yuǎn)場模型誤差分析Fig.4 Error analysis of exact model and far-field model
在情形(iii)時(shí),進(jìn)一步分析星間距離與線圈半徑的比值ρ/a和精確電磁力模型收斂速度的關(guān)系,如圖4(b)所示。在相同計(jì)算精度的情況下,ρ/a越大,精確電磁力模型相對誤差收斂速度越快。
星間距離與線圈半徑的比值ρ/a與遠(yuǎn)場電磁力模型相對誤差如圖4(c)所示。遠(yuǎn)場電磁力模型相對誤差隨著ρ/a增大而減小;當(dāng)ρ/a>7時(shí),遠(yuǎn)場電磁力模型相對誤差約小于10%。
對于線圈半徑不同造成的誤差,在遠(yuǎn)場誤差最大的情形(i)下,繪制遠(yuǎn)場模型相對誤差與aj/ai、線圈距離半徑比的關(guān)系如圖4(d)所示,其中=(ai+aj)2 為線圈平均半徑。在平均半徑aˉ與相對距離ρ不變的情況下,線圈半徑相差越大,遠(yuǎn)場電磁力模型誤差越大。說明衛(wèi)星線圈半徑不同會(huì)造成更大的遠(yuǎn)場模型誤差,這使得異構(gòu)編隊(duì)中對遠(yuǎn)場模型誤差的分析顯得尤為重要。
1.4 相對攝動(dòng)分析
星間電磁力無法補(bǔ)償編隊(duì)整體受到的絕對攝動(dòng)力,但能夠?qū)崟r(shí)補(bǔ)償各星的相對攝動(dòng)力,提高編隊(duì)的相對位置控制精度。為分析主要的相對攝動(dòng)因素,采用后續(xù)3.1 小節(jié)提到的滑模控制器對雙星編隊(duì)進(jìn)行控制,分別保持雙星的徑、切、法向靜態(tài)構(gòu)型[11],分析相對攝動(dòng)加速度量級。
設(shè)置兩星質(zhì)量分別為80 kg 和100 kg,線圈半徑為0.4 m 和0.5 m,迎風(fēng)面質(zhì)比分別為0.004 和0.005,光照面質(zhì)比分別為0.009 和0.010,3 種編隊(duì)下兩星距離均為10 m,軌道高度500 km。將徑、切、法向靜態(tài)構(gòu)型中衛(wèi)星1所受各項(xiàng)相對攝動(dòng)與遠(yuǎn)場模型誤差干擾對比,其結(jié)果如圖5所示。

圖5 電磁編隊(duì)相對攝動(dòng)與遠(yuǎn)場模型誤差干擾比對示意圖Fig.5 Comparison of electromagnetic formation relative perturbation and far-field model error
各項(xiàng)相對攝動(dòng)量級總結(jié)如表1所示。
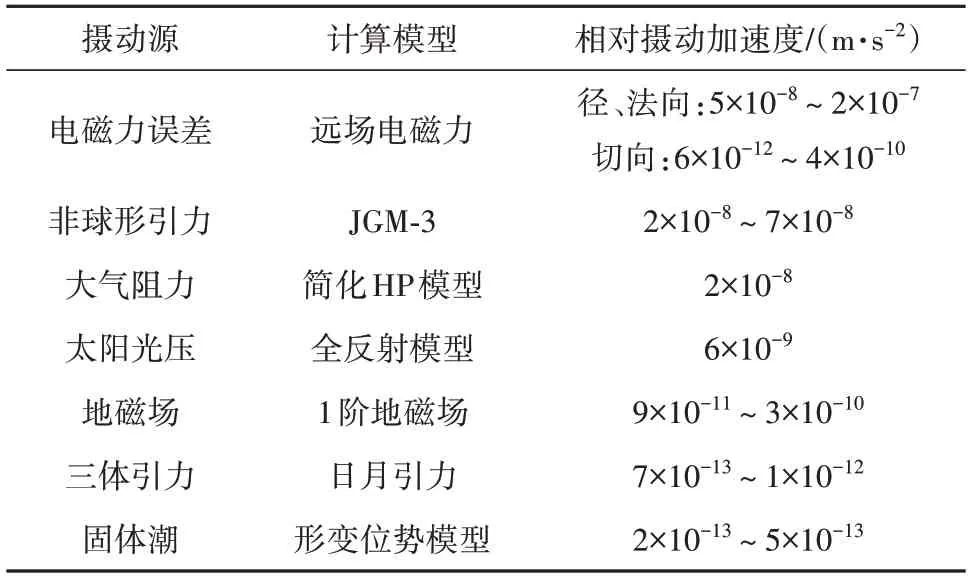
表1 靜態(tài)構(gòu)型編隊(duì)相對攝動(dòng)量級總結(jié)Table 1 Summary of relative disturbance in static formation
由表1 可知,影響編隊(duì)相對運(yùn)動(dòng)的主要干擾項(xiàng)包括遠(yuǎn)場模型誤差、非球形引力、大氣阻力。下面簡要分析這3項(xiàng)干擾。
1)遠(yuǎn)場模型誤差
遠(yuǎn)場模型誤差與磁矩大小相關(guān)。當(dāng)編隊(duì)為切向構(gòu)型時(shí),無需電磁力補(bǔ)償?shù)厍蛞χ饕?xiàng),產(chǎn)生的干擾加速度較小。當(dāng)編隊(duì)為徑向或法向構(gòu)型時(shí),需要較大的電磁力補(bǔ)償?shù)厍蛞铀俣绕睿殡S產(chǎn)生較大的干擾加速度。
2)非球形引力
非球形相對攝動(dòng)主要與衛(wèi)星相對位置相關(guān),在星間距離10 m的情況下,非球形引力可產(chǎn)生10-8m/s2量級的相對加速度。Hill 系下J2 項(xiàng)的相對攝動(dòng)模型[15]如下:
3)大氣阻力
大氣密度根據(jù)改進(jìn)HP 模型[21]選取為軌道密度,平均值7.262 1×10-13kg/m3,大氣阻力相對攝動(dòng)主要與衛(wèi)星迎風(fēng)面質(zhì)比異構(gòu)相關(guān),0.001 的迎風(fēng)面質(zhì)比差異將產(chǎn)生10-8m/s2量級的相對加速度,與非球形攝動(dòng)量級相當(dāng)。假設(shè)各星阻力系數(shù)相同,則大氣阻力的相對攝動(dòng)力模型為:
2 異構(gòu)電磁編隊(duì)靜態(tài)構(gòu)型設(shè)計(jì)
2.1 靜態(tài)構(gòu)型必要條件
本文期望設(shè)計(jì)一種四星編隊(duì)的靜態(tài)構(gòu)型,使得在Hill坐標(biāo)系下,各星保持相對靜止,相對速度與加速度均為0,此時(shí)編隊(duì)呈現(xiàn)類似于單剛體航天器的靜態(tài)構(gòu)型。
基于上述靜態(tài)構(gòu)型定義,有:
式中:CD為阻力系數(shù),取2.2;Kai為衛(wèi)星i的面質(zhì)比;Kac為編隊(duì)整體面質(zhì)比;ρa(bǔ)為大氣密度;v為編隊(duì)質(zhì)心相對大氣的速度大小為編隊(duì)質(zhì)心相對大氣的速度方向。
4)其它攝動(dòng)
太陽光壓相對攝動(dòng)主要與衛(wèi)星受光面質(zhì)比相關(guān),0.001的受光面質(zhì)比差異將產(chǎn)生10-9m/s2量級的相對加速度,相對大氣阻力較小。固體潮、地磁場和第三體引力產(chǎn)生的相對攝動(dòng)均較小。這些攝動(dòng)在后續(xù)的前饋控制中不予考慮。
靜態(tài)構(gòu)型同時(shí)還要求各星相對姿態(tài)保持穩(wěn)定,所以靜態(tài)構(gòu)型要求電磁力矩趨于0。因此靜態(tài)構(gòu)型需同時(shí)滿足力平衡和力矩平衡方程:
在異構(gòu)四星靜態(tài)構(gòu)型設(shè)計(jì)問題中,四星的相對位置有9 個(gè)自由度,磁矩有12 個(gè)自由度,共需滿足24 個(gè)力平衡方程和力矩平衡方程,使得構(gòu)型設(shè)計(jì)較為困難。為了降低系統(tǒng)待求參數(shù)的維數(shù),可以分析電磁編隊(duì)靜態(tài)構(gòu)型的必要條件,給出參數(shù)降維的構(gòu)型設(shè)計(jì)方法。
星間電磁力可以線性疊加:
星間電磁力是編隊(duì)系統(tǒng)內(nèi)力,編隊(duì)整體滿足動(dòng)量與角動(dòng)量守恒:
考慮編隊(duì)整體相對質(zhì)心角動(dòng)量守恒,將式(17)代入式(20)中的角動(dòng)量守恒方程,得到:
結(jié)合式(15)、式(16)和式(21),得到滿足星間內(nèi)力特性的編隊(duì)靜態(tài)構(gòu)型必要條件:
式中:Ixy、Iyz、Ixz為編隊(duì)整體的慣量積,其在靜態(tài)構(gòu)型時(shí)須為零。
式(22)為電磁編隊(duì)靜態(tài)構(gòu)型的一個(gè)必要條件,編隊(duì)的慣量主軸與Hill坐標(biāo)系的三軸平行。基于此必要條件,可以設(shè)計(jì)一類四面體構(gòu)型,并用數(shù)值方法從中找出同時(shí)滿足力平衡和力矩平衡的構(gòu)型。
2.2 四面體構(gòu)型設(shè)計(jì)
根據(jù)靜態(tài)構(gòu)型必要條件,設(shè)計(jì)如圖6 所示的一類四面體構(gòu)型:

圖6 四面體構(gòu)型設(shè)計(jì)Fig.6 Tetrahedral configuration design
圖中:衛(wèi)星1、2、3、4 分別放置于四面體的A、B、C、D點(diǎn),O為四面體質(zhì)心,O1為ΔABC質(zhì)心,O2為BC質(zhì)心。以O(shè)為原點(diǎn)建立Hill 坐標(biāo)系。AD平行xOy平面,BC平行z軸。AO2長為d1,BC長為d2,DO1長為d3,AO2與yOz平面夾角為α∈(-π/2,π/2),∠DO1O2=β∈(0,π)。
根據(jù)上述描述計(jì)算得到編隊(duì)整體相對質(zhì)心的慣量積分別為:
能夠使得式(23)的慣量積均為0。
上述四面體構(gòu)型共有包括d=[d1,d2,d3]和α4個(gè)自由度,基于這些參數(shù)得到各星相對位置為:
通過上述四面體構(gòu)型設(shè)計(jì),將設(shè)計(jì)自由度從21維降至16維,同時(shí)也限制了構(gòu)型形狀為四面體。所以,電磁編隊(duì)靜態(tài)構(gòu)型設(shè)計(jì)問題可以轉(zhuǎn)換為一組含有16個(gè)自由變量和24個(gè)方程的求解問題:
式中:16個(gè)自由變量為d1,d2,d3,α,μ1x,μ1y,μ1z,μ2x,μ2y,μ2z,μ3x,μ3y,μ3z,μ4x,μ4y,μ4z。
上述求解問題由于強(qiáng)耦合性和強(qiáng)非線性,無法求得解析解,只能采用數(shù)值方法求解,例如使用L-M算法求得近似的構(gòu)型數(shù)值解。
另外,結(jié)合式(3)、(15)和(30),得到電磁靜態(tài)構(gòu)型編隊(duì)星間距離與磁矩大小的比例關(guān)系:
上式表明編隊(duì)靜態(tài)構(gòu)型在保持形狀不變的情況下,通過縮放構(gòu)型尺度,并按照式(31)所示比例改變各星磁矩,所得到的新構(gòu)型仍為靜態(tài)構(gòu)型。因此,每個(gè)靜態(tài)構(gòu)型都可以縮放構(gòu)型尺度得到一組形狀一致的靜態(tài)構(gòu)型解。
2.3 構(gòu)型非線性修正
根據(jù)1.4 小節(jié)的分析,遠(yuǎn)場模型簡化時(shí)忽略的非線性項(xiàng)是影響電磁編隊(duì)靜態(tài)構(gòu)型保持的最主要因素。在靜態(tài)構(gòu)型設(shè)計(jì)過程中,需考慮對基于遠(yuǎn)場模型得到的靜態(tài)構(gòu)型進(jìn)行非線性修正。將其作為初值代入基于精確電磁力模型的構(gòu)型設(shè)計(jì)算法中,重新求解得到修正后的靜態(tài)構(gòu)型。其流程如圖7所示。
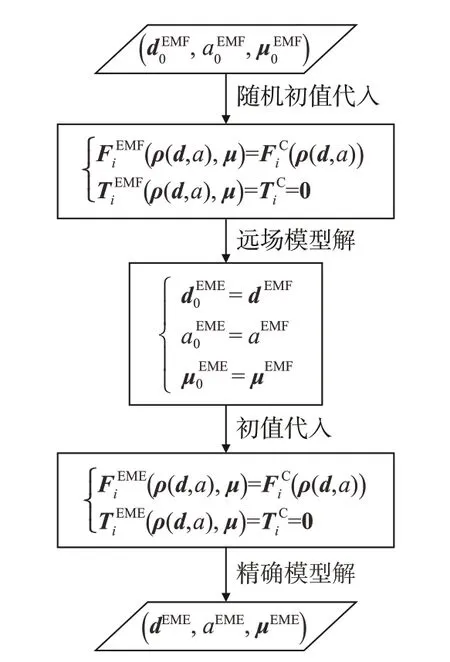
圖7 靜態(tài)構(gòu)型解的非線性修正流程Fig.7 Nonlinear correction process for static configuration solution
為了檢驗(yàn)非線性修正提高構(gòu)型設(shè)計(jì)精度的效果,基于精確電磁力模型定義靜態(tài)構(gòu)型數(shù)值求解精度:
2.4 構(gòu)型求解
為驗(yàn)證電磁編隊(duì)靜態(tài)構(gòu)型設(shè)計(jì)方法的有效性,便于下文控制仿真,設(shè)定初始四星參數(shù)如表2所示:
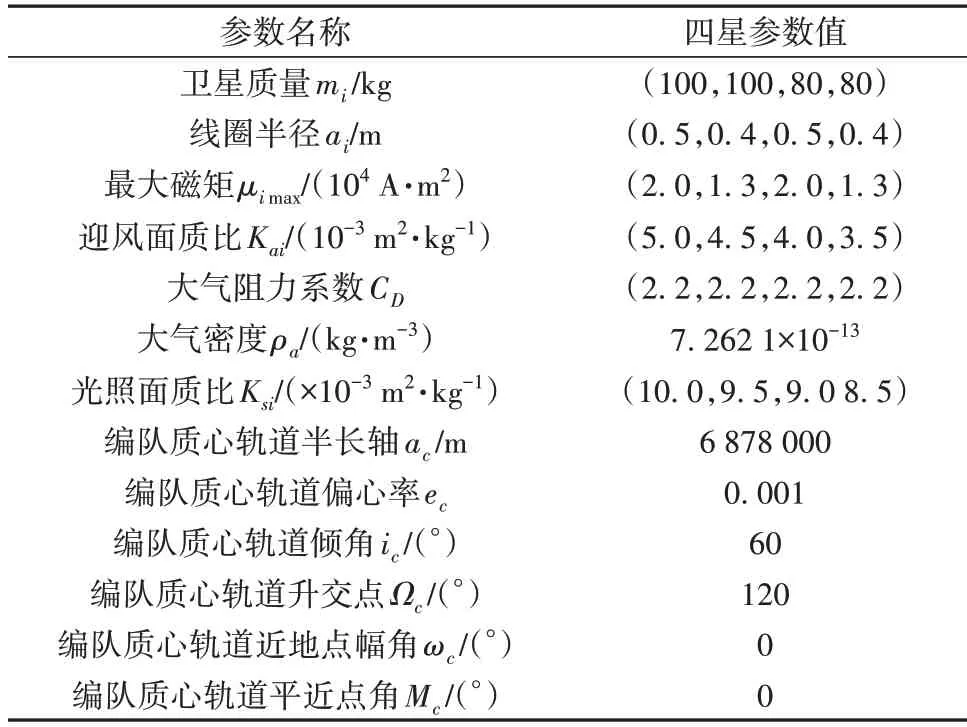
表2 四星參數(shù)Table 2 Parameters of four satellites
根據(jù)2.2 小節(jié)的分析,構(gòu)型尺度等比例改變時(shí)仍然能保證靜態(tài)構(gòu)型,所以約束d2=10 m,簡化求解過程。靜態(tài)構(gòu)型方程組式(30)的求解初值隨機(jī)給定,通過10 000 次計(jì)算求得97 組不同的構(gòu)型解。以總磁矩最小的構(gòu)型為例,得到修正前的靜態(tài)構(gòu)型參數(shù)如表3所示:

表3 修正前的靜態(tài)構(gòu)型參數(shù)Table 3 Static configuration parameters before correction
對構(gòu)型解進(jìn)行非線性修正,得到修正后的靜態(tài)構(gòu)型參數(shù)如表4所示:
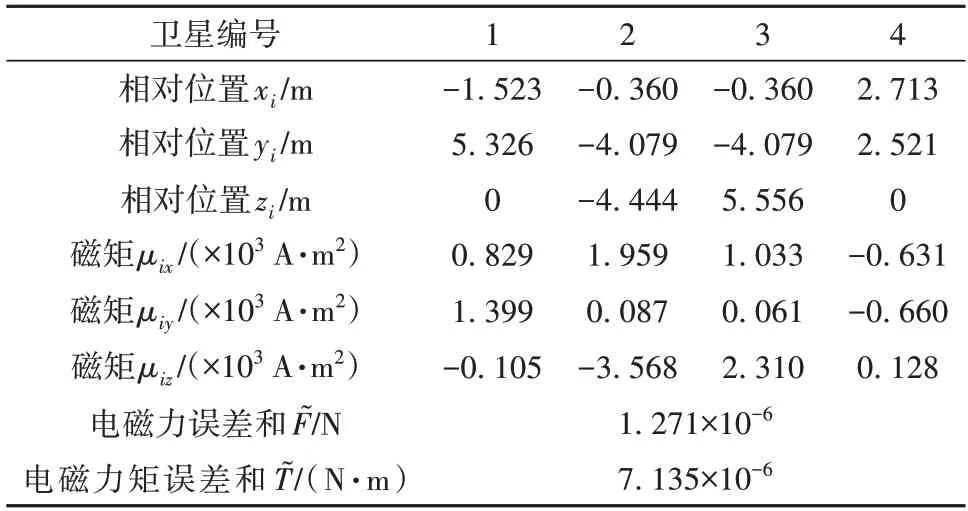
表4 修正后的靜態(tài)構(gòu)型參數(shù)Table 4 Static configuration parameters after correction
由表3、4可知,在上述構(gòu)型下,經(jīng)過非線性修正后,電磁力誤差和降低了98%,電磁力矩誤差和降低了90%。這說明了本文的構(gòu)型設(shè)計(jì)算法給出了合理的靜態(tài)構(gòu)型,而且非線性修正有效提高了構(gòu)型精度。修正后的靜態(tài)構(gòu)型如圖8所示。
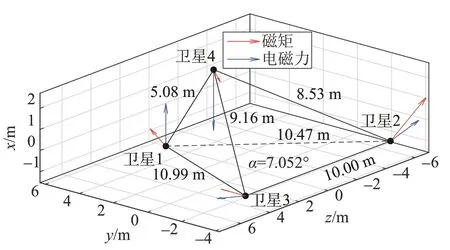
圖8 靜態(tài)構(gòu)型示例Fig.8 Example of static configuration solution
3 電磁編隊(duì)控制設(shè)計(jì)
3.1 控制器設(shè)計(jì)
為了驗(yàn)證靜態(tài)構(gòu)型設(shè)計(jì)算法的有效性,實(shí)現(xiàn)編隊(duì)相對位置控制,結(jié)合文獻(xiàn)[15]和[20],設(shè)計(jì)攝動(dòng)前饋結(jié)合滑模控制算法。
C-W方程式(1)可以簡寫為矩陣形式:
定義常系數(shù)αi>0,設(shè)計(jì)滑模面:
模型前饋加速度Φi為:
采用指數(shù)趨近律,衛(wèi)星i的控制器Ui設(shè)計(jì)如下:
式中:ηi>0;ki>0。為了避免抖振現(xiàn)象,γi(si)=[γi(six),γi(siy),γi(siz)]T滿足:
式中:εi>0且較小;si=[six,siy,siz]T。
考慮到需要滿足四星電磁力合力為零的約束,只利用式(36)計(jì)算衛(wèi)星2、3、4 的控制力,衛(wèi)星1 的控制力通過式(19)得到。控制器結(jié)構(gòu)整體如圖9所示。

圖9 電磁編隊(duì)相對位置控制器結(jié)構(gòu)Fig.9 Structure of electromagnetic formation relative position controller
3.2 磁矩分配優(yōu)化
四星的磁矩的自由度共有12個(gè),需要滿足12個(gè)電磁力等式。但由于電磁力合力為零,減少了3 個(gè)等式,所以實(shí)際上磁矩分配問題是用9 個(gè)獨(dú)立方程求解12個(gè)未知數(shù),存在無數(shù)組磁矩解。一個(gè)求解思路是將問題轉(zhuǎn)換為如下多目標(biāo)優(yōu)化問題:
式中:Δμi表示航天器i的磁矩與上一個(gè)控制周期的變化量;μimax為衛(wèi)星i能夠產(chǎn)生的最大磁矩。
第1 個(gè)目標(biāo)希望耦合產(chǎn)生的電磁力矩最小,減小動(dòng)量輪負(fù)擔(dān);第2 個(gè)目標(biāo)限制磁矩變化量不要過大,主要原因是最優(yōu)磁矩至少有互為相反數(shù)的兩個(gè)解,通過添加第2個(gè)目標(biāo),使得磁矩不會(huì)在兩個(gè)解之間頻繁切換。
該最優(yōu)問題可采用序列二次最優(yōu)(SQP)算法求得磁矩?cái)?shù)值解。為減少陷入局部最優(yōu)的情況,隨機(jī)多個(gè)初值計(jì)算,并且設(shè)定兩個(gè)求解初值為靜態(tài)構(gòu)型磁矩解和上一控制周期的磁矩解。
對于遠(yuǎn)場模型誤差問題,可以采用類似于圖7的原理對磁矩解進(jìn)行非線性修正,提高磁矩分配優(yōu)化計(jì)算精度。
4 數(shù)值仿真
四星參數(shù)參考表2。仿真動(dòng)力學(xué)攝動(dòng)模型考慮1.4 小節(jié)中提到的所有攝動(dòng)項(xiàng),包括遠(yuǎn)場模型誤差、非球形引力、大氣阻力、太陽光壓、固體潮、地磁場和第三體引力。仿真積分器采用ODE45,控制周期設(shè)置為1 s,時(shí)長設(shè)置為11 354 s(2 個(gè)軌道周期),其中0~2 000 s 用于驗(yàn)證編隊(duì)重構(gòu)至靜態(tài)構(gòu)型的過程,2 000~11 354 s 用于驗(yàn)證編隊(duì)在靜態(tài)構(gòu)型附近的穩(wěn)態(tài)控制過程。設(shè)置編隊(duì)初始構(gòu)型為邊長10 m的正四面體,期望構(gòu)型如圖8 所示。控制器參數(shù)αi=0.01,ηi=10-5,εi=10-5,ki=10-2,磁矩分配優(yōu)化目標(biāo)權(quán)重w1=1012,w2=10-3。控制器中使用的精確電磁力模型離散點(diǎn)數(shù)N=10。仿真結(jié)果如圖10~15所示。
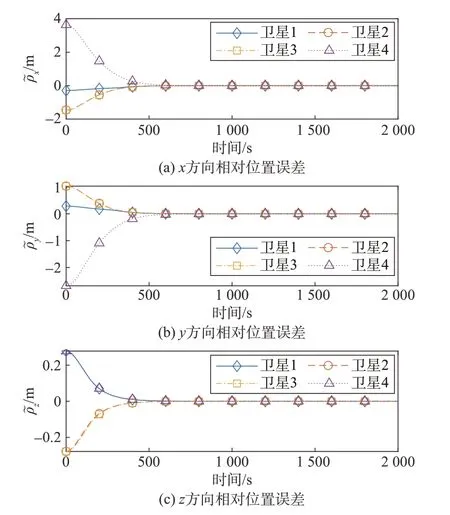
圖10 四星構(gòu)型重構(gòu)過程Fig.10 Configuration reconstruction of four satellites
圖10、圖11展示了構(gòu)型重構(gòu)過程中各星的相對位置和磁矩變化情況,電磁編隊(duì)在約600 s時(shí)接近期望構(gòu)型附近,表明了設(shè)計(jì)的滑模控制器具有一定的重構(gòu)能力。
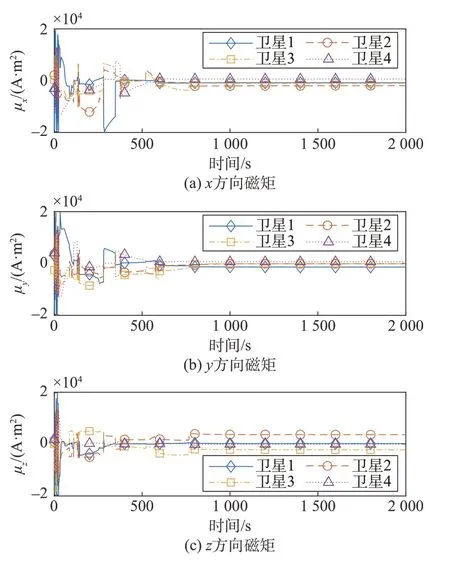
圖11 四星構(gòu)型重構(gòu)過程磁矩Fig.11 Magnetic dipoles of four satellites in the configuration reconstruction
圖12、圖13 展示了各星在穩(wěn)態(tài)情況下,相對位置誤差不超過1×10-5m,相對速度誤差不超過1×10-8m·s-1,表明了編隊(duì)構(gòu)型保持的高精度。
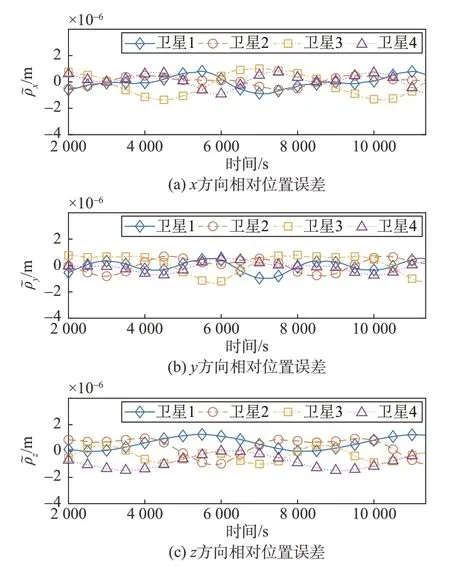
圖12 四星穩(wěn)態(tài)相對位置誤差Fig.12 Steady-state relative position errors of four satellites
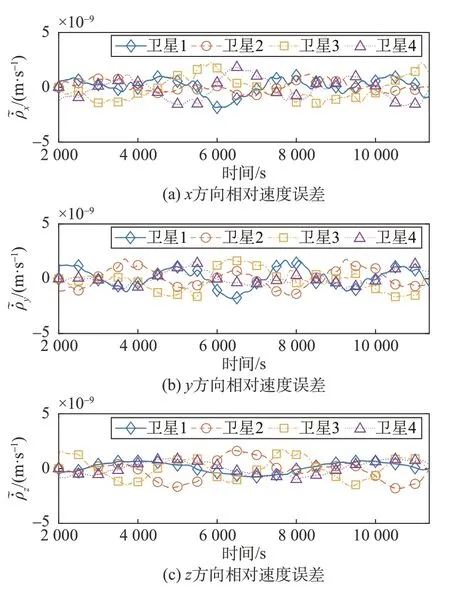
圖13 四星穩(wěn)態(tài)相對速度誤差Fig.13 Steady-state relative velocity errors of four satellites
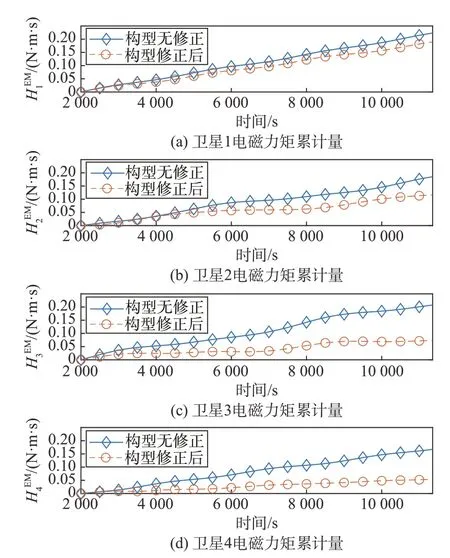
圖14 靜態(tài)構(gòu)型非線性修正效果比較Fig.14 Comparison of nonlinear correction for static configuration
圖15 說明了在第3 節(jié)設(shè)計(jì)的控制器下,控制磁矩經(jīng)過精確電磁力模型修正后,平均減小了約94%的穩(wěn)態(tài)位置誤差。

圖15 控制磁矩修正效果比較Fig.15 Comparison of control magnetic dipole correction
5 結(jié)論
本文提出了異構(gòu)四星電磁編隊(duì)的靜態(tài)構(gòu)型設(shè)計(jì)與保持控制方法。主要工作包括以下3個(gè)方面:
1)對近地軌道的電磁靜態(tài)構(gòu)型編隊(duì)所受的相對攝動(dòng)力進(jìn)行了分析,指出在各星相對位置存在徑向與法向偏差時(shí),遠(yuǎn)場電磁力模型誤差是相對干擾主要項(xiàng)。
2)分析得到了靜態(tài)構(gòu)型編隊(duì)質(zhì)量分布的必要條件,并基于必要條件設(shè)計(jì)了一組四面體構(gòu)型參數(shù),顯著降低了求解空間維數(shù)。通過基于精確電磁力模型的非線性修正,提升了靜態(tài)構(gòu)型設(shè)計(jì)精度。
3)設(shè)計(jì)了攝動(dòng)前饋結(jié)合滑模控制器,并使用精確電磁力模型修正磁矩,提高了磁矩分配的準(zhǔn)確性。
本文的空間靜態(tài)構(gòu)型研究基于四星編隊(duì),對于多于四星的編隊(duì),提出的編隊(duì)控制算法同樣適用,但也存在衛(wèi)星數(shù)量增多導(dǎo)致的磁矩求解難度迅速加大的問題,在未來需要進(jìn)一步考慮基于拓?fù)鋬?yōu)化的一致性控制算法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03