異構多智能體輸出調節量化自適應跟蹤控制
2024-05-27 06:46:56馬梓元萬茹龔華軍王新華
宇航學報 2024年3期
馬梓元,萬茹,龔華軍,王新華
(南京航空航天大學自動化學院,南京 211106)
0 引言
多智能體系統(Multi-agent system,MAS)概念的提出旨在解決復雜控制系統中多個被控對象同時參與多種控制任務的問題,并且被廣泛應用于無人機[1]、航天器[2]和無人船[3]等領域。當前,多智能體系統在理論及工程應用領域都得到極大關注,多智能體系統的研究通常針對復雜條件下一階、二階甚至更高階智能體模型之間的協同控制[4-5],同時被控對象的自適應能力與更好的編隊跟蹤能力也成為研究學者重點關注的問題,并在無人飛行器感知及協同編隊、復雜航天器協同自適應控制[6]等領域取得了較為矚目的理論及應用成果。
MAS 通常由智能體的動力學模型集合、通信拓撲和分布式控制器3個基本要素構成。有關于分布式控制器的設計則往往基于通信拓撲下跟蹤誤差的重新整定。一致性控制問題是MAS 的主要研究分支之一,旨在利用通信網絡拓撲實現MAS 內每個智能體向參考指令的一致性跟蹤。每個智能體的跟蹤控制器需考慮通訊拓撲結構,即認為跟蹤控制器輸出信號的計算依賴于通信網絡拓撲,以及在該網絡拓撲下的一致性跟蹤誤差,具有顯著的聚集行為特征。
然而,在多智能體系統一致性跟蹤控制問題的研究中,關于部分狀態信息丟失的研究較少,尤其在部分通道信息整體丟失時,如何利用降維輸出變量構建基于輸出調節的一致性跟蹤控制器,成為MAS 一致性控制問題中的新難點。當前,關于輸出調節問題的研究仍多集中于單一被控對象,如文獻[7]在固定翼飛行器的控制律設計中,運用輸出調節模型參考自適應方法將飛機的近似開環線性模型配置到穩定的閉環極點上,而文獻[8]則進一步討論了該方法所采用的輸出變量信號的最小階數。文獻[9]提出一種基于反步法的輸出調節方法,結合狀態觀測器設計輸出調節自適應控制器。上述方法雖然解決了單一被控對象的輸出調節問題,但考慮MAS 一致性控制問題中虛擬誤差變量引入后的控制器實現,上述方法仍不能直接應用,需要依據通信拓撲進行進一步改進。
同時,在實際控制系統中,盡管MAS 的開環動力學模型中每個智能體的狀態都為連續時間狀態,但控制器的實際輸入受到控制回路中執行機構及硬件電路的影響,往往被視為一類量化的輸入信號。有關于量化控制信號的概念最早出現于網絡控制系統的研究中,指控制信號在通信中不可避免地被轉化為一類或幾類量化信號,實際控制輸入則由量化信號給出。量化輸入信號的引入將降低閉環控制系統性能,因此針對量化輸入問題的研究在近年逐漸獲得關注,并取得一些理論進展。考慮到系統內部參數的不確定性,部分基于自適應量化控制的方案也逐漸被提出,但大多基于單一動力學系統。比較常見的自適應量化控制方案大多基于單輸入單輸出系統假設,基于反步法控制架構解決嚴格反饋系統下的控制問題。文獻[10-14]對輸出調節及外界擾動抑制問題進行了相應的研究。文獻[15-16]采用基于卡爾曼濾波的模型參考魯棒自適應控制器,通過卡爾曼濾波器對系統狀態進行預估的方式,提高控制系統性能。然而,針對MAS 系統的輸入量化問題卻很少得到研究,其主要原因在于MAS系統在考慮通信拓撲及內部智能體參數耦合后,嚴格反饋系統假設可能不成立,同時基于反步法的控制結構導致MAS 系統控制效率顯著降低。因此在MAS框架下研究輸入量化問題也具有較大的難度。
本文提出一種基于一致性理論的輸出調節量化自適應跟蹤控制算法,用于解決參數不確定條件下MAS系統的編隊跟蹤問題。并針對無人機-無人船組成的異構多智能體系統模型開展數值仿真,驗證本文提出的控制算法的有效性。
1 問題描述
1.1 多智能體系統動力學模型
首先針對由N智能體組成的MAS 中每個智能體進行建模。認為第i個智能體可以描述為Mi輸入Mi輸出的近似線性時不變系統形式,i=1,2,…,N,MAS系統動力學模型可描述成下述形式:
在本文中,考慮量化輸入的MAS 閉環系統的設計將依賴于下式:
式中:A,B,C為未知的系統狀態參數矩陣。由式(4)改寫得到的輸入輸出描述為:
式中:Gi(s)為第i個智能體的輸入-輸出傳遞函數,G(s)則為MAS系統的輸入-輸出傳遞函數矩陣。
引理 1[17].為便于后續推導,給出如下引理,對于任意M×M的有理嚴格正實矩陣,即傳遞函數矩陣Gi(s),存在下三角多項式矩陣ξm(s)為Gi(s)的左乘正交矩陣,其矩陣形式為:
本文控制器的設計基于如下假設:
假設 1.系統G(s)=C(sI-A)-1B漸近穩定且可觀測。由此保證本文MAS 閉環系統可控,且狀態信息全可獲取。
假設 2.Gi(s)為滿秩矩陣且其左乘正交矩陣ξm已知。
1.2 通信網絡拓撲描述
本文利用固定有向拓撲進行MAS 通信網絡的描述。圖論用于描述MAS 系統中智能體之間的通信流向,詳見參考文獻[17]中的具體解釋。將MAS中的有向拓撲圖表達為G=(V,E,A),其中V={vi,i=1,…,N}為拓撲圖的節點集合,E?V×V為邊界集合,A=[ai,j]∈RN×N為拓撲圖的鄰接權值矩陣,且對于(i,j) ∈E,i≠j,aij=1,否則aij=0。同時,定義L=D-A為G=(V,E,A)的Laplacian 矩陣,其中D=diag(d1,…,dn) (n=1,2,…,N),di=
定義一個編號為0 的虛擬領航者,讓其跟隨參考指令輸出ym領航者,則可以將有向拓撲圖G=(V,E,A)擴展為其中為相應擴展的邊界集和鄰接權值矩陣。
1.3 控制目標
本文假定各跟隨者的輸出yi狀態維數相同且與ym保持一致,通過設計控制器使得每個跟隨者的狀態yi(t)一致性趨近ym(t)。
定義第i個智能體的輸出跟蹤誤差為:
若僅對每個獨立智能體進行控制,則控制目標為ei(t)有界。為解決MAS 系統的一致性跟蹤問題,進一步定義針對第i個智能體的一致性輸出跟蹤誤差矩陣?i(t)如下:
上式中,若第j個智能體可獲取領航者的狀態信息,則di=1,否則di=0。將MAS 跟蹤誤差與一致跟蹤誤差表達為:
則?與e有如下關系:
編隊跟蹤控制的目標為使?有界。運用多變量模型參考自適應(MRAC)方案對MAS 進行輸出匹配,即要求被控對象跟蹤下述參考模型:
式中:r∈RM為有界的參考輸入信號,根據假設2,容易得出Wm(s)是穩定的。
2 編隊控制器設計
2.1 標稱輸出調節編隊跟蹤控制結構設計
標稱控制結構主要用于給出各模型參考已知且不考慮輸入量化前提下的控制器輸出反饋形式。在模型參數已知的前提下,針對第i個智能體,首先利用系統輸出yi=Cixi觀測系統狀態并基于觀測狀態設計反饋控制結構。給出基于觀測狀態設計的標稱反饋控制律:
由于需確保設計的控制器能夠使閉環系統配置到參考模型上,給出下述標稱控制器參數和匹配條件:
由此,全狀態觀測器表達為:
求解式(16),容易得到:
式中:εi0(t)代表由初值引起的誤差影響,通常可被忽略,Λi(s)=det(sI-+)。將標稱控制器的狀態反饋部分表示為:
2.2 輸出調節編隊跟蹤自適應量化控制器設計
在本文探討的控制問題中,狀態空間參數矩陣Ai,Bi,Ci均未知,且控制輸入引入了額外的延遲量化信號。在上述條件下,考慮基于自適應律估計各反饋增益。然而,對三個狀態矩陣Ai,Bi,Ci的直接自適應估計存在較為復雜的耦合,因此考慮在頻域內對高頻增益矩陣Kpi進行LDS分解,實現自適應估計變量的解耦和參數化。給出如下假設:
假設3.高頻矩陣Kpi的所有順序主子式Δi,i=1,2,…,M都是非零的,并且它們的符號已知。這樣的Kpi具有非唯一的LDS矩陣分解
考慮到輸出量化問題,對第i個智能體,給定一個虛擬輸入變量vi,引入一個穩定的多項式f(s),其次數等于左交互矩陣ξm(s)的最大次數。定義濾波器h(s)=1/f(s),將自適應編隊跟蹤控制器表述為:
式中:η>0 為待整定系數,m由(32)給出。針對每個智能體的輸出跟蹤誤差,代入控制器(21),將跟蹤誤差改寫為:
利用高頻增益矩陣Kpi的LDS 分解對每個智能體跟蹤誤差中的自適應變量實現參數化求解,同時將式(22)改寫為:
進一步將該方程進行參數化,利用濾波器h(s)對估計誤差方程進行修正,將等式表示為:
則等式進一步改寫為:
為實現控制對象向參考模型的跟蹤,除了要求跟蹤誤差收斂外,還需實現模型的輸出匹配,即要求高頻增益矩陣及控制器參數收斂到標稱值。基于每個智能體的輸出跟蹤誤差首先構建第i個智能體的參數估計誤差方程:
2.3 控制器穩定性分析
對本文提出的基于自適應律設計的參數估計有界性進行分析。定義Lyapunov函數如下:
考慮量化輸入信號q(u),根據文獻[11],認為:
根據式(36),式(35)中部分項可改寫為:
根據Young不等式[16],有:
式中:kd>0為待定系數。從而將式(38)整理為:
回顧控制器(21),根據文獻[12],存在下述關系:
結合L+D>0,S=ST>0,則有:
式(40)可進一步整理為:
根據式(43),將式(35)最終化簡為:
3 仿真驗證
為驗證本文提出的編隊控制方法可行性和有效性,在MATLAB 環境下開展p艘無人船與q架無人機組成的異構MAS系統在xoy二維平面內的編隊數值仿真,p≥2,q≥2,p+q=N。對q架無人機的飛行編隊,給出第i架無人機的運動學方程如下:
式中:xi,yi代表第i架無人機在x,y方向的位置,vi為第i架無人機速度,ψi為第i架無人機的航向角,ωi為第i架無人機的航向角速度。無人機的動力學方程采用簡化的近似線性狀態方程,第i架無人機的動力學方程如下:
式中:Ai,Bi,Ci為第i架無人機的狀態矩陣,mi=[vi,ωi]T,模型控制 輸入ui=[δTi,δri]T為油門開度與差動副翼舵偏角。無人機動力學模型表示成式(4)的形式,則第i架無人機狀態變量表示為=[xi,yi,ψi,vi,ωi]T,模型輸出為=[fi,li]T,其中fi,li分別代表無人機前向與側向位移,其表達為:
對p艘無人船組成的航行編隊,第j艘無人船的運動學方程如下:
式中:xj,yj為第j艘無人船位置,ψj為第j艘無人船偏航角,uj,vj,rj分別為無人船在船體坐標系下的前向速度、側向速度及偏航角速度,j=q+1,…,N。無人船的動力學模型如下:
式中:mu,mv,mr為船體慣性參數,控制輸入uj=[τuj,τrj]T,非線性項fw(w),fv(v),fr(r)定義為
無人機動力學模型參數由文獻[18]給出,無人船動力學模型參數由文獻[19]給出。無人機數量為2架,無人船數量為2艘。輸入量化參數δ=0.8,umin=0.02。將參考模型選取為:
參考輸入指令選取為:
仿真結果如圖1~2所示。仿真結果表明,在無人船控制通道采取量化輸入形式時,各閉環信號仍能保證對時變參考輸出信號的一致跟蹤,從而驗證了本文所提出的編隊控制算法的有效性。
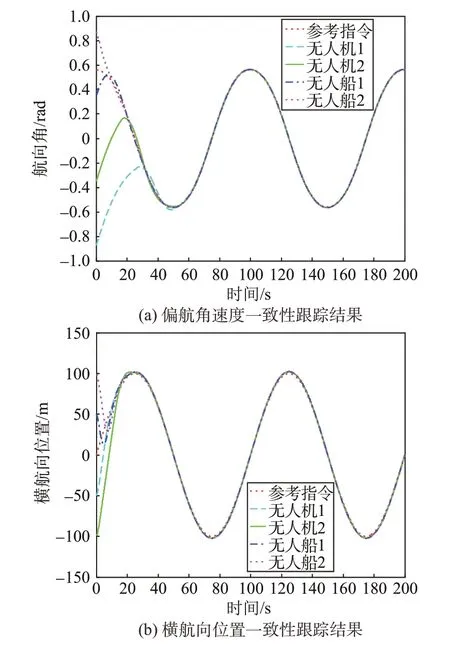
圖1 各輸出響應一致性跟蹤結果Fig.1 Consensus tracking result of each response
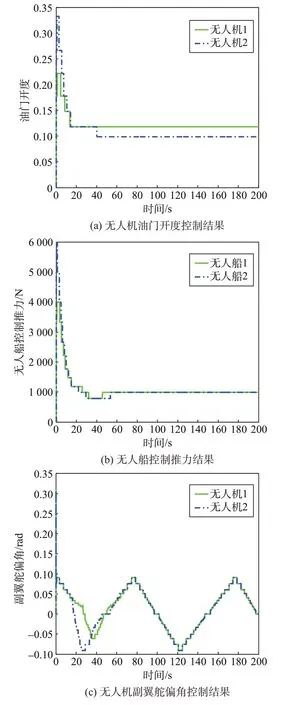
圖2 量化輸入結果Fig.2 Results of quantized input
4 結論
本文提出了一種基于輸出調節量化自適應一致性的編隊跟蹤算法,用于解決硬件在環假設下控制輸入量化后的異構多智能體一致性跟蹤控制問題。基于輸出調節思想,認為系統內部分狀態整體丟失或不能獲取,利用僅有的降維輸出實現各閉環信號的一致性有界跟蹤。通過理論分析及數值仿真分別驗證了所提出方法的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32