一種空中自主加油擾動建模與自適應(yīng)控制方法
2024-05-27 06:46:40張冬王世鵬施明健王大勇朱家興
宇航學(xué)報 2024年3期
關(guān)鍵詞:模型
張冬,王世鵬,施明健,王大勇,朱家興
(1.復(fù)旦大學(xué)航空航天系,上海 200433;2.沈陽飛機設(shè)計研究所,沈陽 110035;3.西北工業(yè)大學(xué)自動化學(xué)院,西安 710089)
0 引言
空中加油是提升作戰(zhàn)載荷、擴大作戰(zhàn)半徑的重要技術(shù)途徑,同時能夠有效解決飛機起飛質(zhì)量與飛行性能之間的矛盾[1]。近些年無人機由于其高敏捷、低傷亡的特點被廣泛應(yīng)用于軍事作戰(zhàn)領(lǐng)域。但是無人機載彈量低且作戰(zhàn)距離短,因此空中自主加油技術(shù)應(yīng)運而生。空中自主加油技術(shù)能夠大幅提升無人機的作戰(zhàn)半徑與續(xù)航時間,有效拓展無人機在軍事領(lǐng)域的應(yīng)用場景[2]。無人機的空中自主加油技術(shù)就是在大氣紊流、加油機尾流、受油機繞流等干擾作用下完成對加油對象的準(zhǔn)確定位以及對受油機位姿的高精度魯棒控制。
自主空中加油過程主要包括:受油機接近加油機、受油機進入加油指定位置并保持、受油探管與加油錐套對接以及受油機保持與加油機的相對位置并完成加油,其中各階段面臨著大氣擾動、加油機尾流、受油機繞流等干擾下的相對位姿定位、跟蹤與保持控制問題[3-4]。動態(tài)逆是在非線性擾動影響下對接受油過程中常用的控制方法[5-6],文獻[7]基于時標(biāo)分離原則將飛行狀態(tài)劃分為姿態(tài)角組成的外回路和角速率組成的內(nèi)回路,設(shè)計了基于過載控制誤差的飛行控制律。文獻[8]設(shè)計了一種全飛行模式適用的反演控制方法,利用擴張觀測器解決模型中的非仿射項,采用動態(tài)逆實現(xiàn)升降襟副翼的控制。此外,基線控制律加補償或自適應(yīng)模塊的方式得到了越來越廣泛的應(yīng)用,文獻[9]設(shè)計了動態(tài)逆加魯棒補償?shù)膶涌刂葡到y(tǒng),利用動態(tài)逆方法設(shè)計制導(dǎo)律和控制律,然后通過H∞回路實現(xiàn)在線補償;文獻[10]基于模糊控制原理實現(xiàn)對PID 參數(shù)的實時調(diào)整,提升了對接控制階段的飛行穩(wěn)定性;文獻[11]以LQR 比例積分型控制器作為穩(wěn)定閉環(huán),然后加入L1自適應(yīng)控制器,使其在滿足瞬態(tài)性能要求的同時,滿足穩(wěn)態(tài)精度要求。位置保持控制是受油機在對接前的等待階段以及對接后的受油階段共同面臨的問題,文獻[12]將渦流影響作為數(shù)學(xué)模型中的未知干擾,設(shè)計了自適應(yīng)控制律實現(xiàn)未知渦流影響下的位置保持控制。文獻[13]設(shè)計了抑制風(fēng)場擾動的有限時間控制器,通過快速終端滑模面消除跟蹤角誤差,以保證空中加油過程的穩(wěn)定編隊飛行。
在目前的相關(guān)研究中,空中加油階段大氣擾動與尾流干擾等模型的理論描述已較為充分,但建立受油機的擾動動力學(xué)模型時,需要簡化的、能描述特性的擾動等效模型;針對空中自主加油過程近距對接控制問題,目前空中加油控制方法通常采用制導(dǎo)、控制解耦設(shè)計的方式,但軌跡環(huán)與姿態(tài)環(huán)在非線性影響顯著的空中加油過程中會存在無法忽略的耦合效應(yīng);此外,空中加油控制模塊的擾動抑制功能多被設(shè)計為被動方法[14]。
面向空中自主加油控制,首先基于真實空中加油飛行受到的擾動特征建立了大氣紊流、受油機繞流、加油機尾流等擾動的等效模型,以及加/受油機相對位置模型、受油機動力學(xué)模型;然后設(shè)計了一種包括軌跡環(huán)和姿態(tài)環(huán)的三回路動態(tài)逆控制框架;最后在姿態(tài)環(huán)設(shè)計了基于滑模干擾觀測器的自適應(yīng)干擾抑制控制方法。以動態(tài)逆為基線控制律,設(shè)計了基于超螺旋算法的二階滑模干擾觀測器實現(xiàn)對姿態(tài)外環(huán)擾動的補償,同時設(shè)計了角速率觀測器實現(xiàn)對角速率內(nèi)環(huán)長時干擾的自適應(yīng)抑制。
1 空中自主加/受油系統(tǒng)建模
1.1 加/受油機相對位置建模
規(guī)定空中自主加油系統(tǒng)的坐標(biāo)系表示符號,大地坐標(biāo)系為OGXGYGZG,受油機機體坐標(biāo)系為OAXAYAZA,加油機機體坐標(biāo)系為ORXRYRZR。通過受油探管和加油錐套來描述加/受油機之間的相對位置。其中加/受油機的機體坐標(biāo)系重心位于相應(yīng)的質(zhì)心,大地坐標(biāo)系的位置是任意的。
在受油機機體坐標(biāo)系中,受油探管位置規(guī)定為:
則大地坐標(biāo)系中受油探管的位置可以表示為:
式中:A為機體坐標(biāo)系與大地坐標(biāo)系之間的轉(zhuǎn)換矩陣,由受油機的歐拉角ψ,?,γ確定為大地坐標(biāo)系中的受油探管位置為大地坐標(biāo)系中的受油機質(zhì)心位置。
大地坐標(biāo)系下錐套的位置可以表示為:
式中:AR為機體坐標(biāo)系與大地坐標(biāo)系之間的轉(zhuǎn)換矩陣,由加油機的歐拉角ψR,?R,γR確定為放下加油軟管時錐套在加油機坐標(biāo)系中的位置為大地坐標(biāo)系中錐套位置為大地坐標(biāo)系中加油機質(zhì)心位置。其中:
加/受油機以及相應(yīng)的加油設(shè)備相對位置如圖1所示。
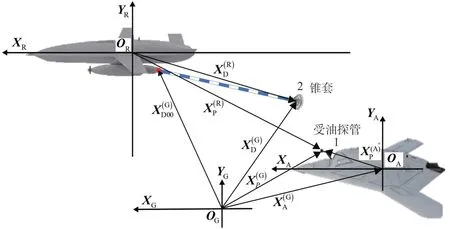
圖1 加/受油機相對位置示意圖Fig.1 Schematic diagram of the relative position of tanker and receiver aircraft
參考大地坐標(biāo)系中錐套位置關(guān)系式(3),可以確定相對于加油機的由矢量給定的空間任意點的位置:
根據(jù)上述加/受油相對位置建模分析,可以確定受油探管和加油錐套的接觸條件和脫開條件分別如式(7)和式(8)所示:
式中:RD表示錐套半徑。
1.2 受油機動力學(xué)建模
受油機在空中加油過程中自主尋找加油機目標(biāo)并實現(xiàn)加油設(shè)備的對接輸油,在這個過程中重點關(guān)注受油機數(shù)學(xué)模型的建立。建立受油機的姿態(tài)動力學(xué)和位置動力學(xué)模型如下所示[15]:
式中:γ,θ,ψ分別為滾轉(zhuǎn)角、俯仰角、偏航角;ωx,ωy,ωz分別為滾轉(zhuǎn)角速率、偏航角速率、俯仰角速率;Sg,h,z分別為前向位置、高度、側(cè)向位置;T為推力;,,分別為機體坐標(biāo)系下的前向力、法向力和側(cè)向力;Mx,My,Mz分別為滾轉(zhuǎn)力矩、偏航力矩、俯仰力矩;Δmxvort和Δmzvort分別為加油機渦流對受油機滾轉(zhuǎn)通道和俯仰通道的擾動力矩;Ixx,Iyy,Izz為三通道轉(zhuǎn)動慣量,Ixy為慣量積;Vx,Vy,Vz為受油機質(zhì)心速度在機體軸的三軸分量;ΔVy=Vy+Δwyw,ΔVz=Vz+Δwzw,Δwyw和Δwzw為高度方向和側(cè)向氣流干擾,其中Δwyw=FwakeΔwywind,Δwzw=FwakeΔwzwind,F(xiàn)wake為加油機后尾流擾動影響函數(shù),Δwywind和Δwzwind分別為高度方向和側(cè)向的紊流干擾分量。
1.3 大氣紊流對錐套位置影響建模
軟管/錐套機構(gòu)是加油機攜帶的柔性輸油設(shè)備,外部大氣擾動會對其產(chǎn)生無法忽略的影響。加油錐套和彎曲軟管的運動動態(tài)研究是一個較為復(fù)雜的問題。在地面模擬空中自主加油的控制系統(tǒng)時,使用高階模型會增加計算負擔(dān),因此可以使用簡化模型描述由外部擾動引起的錐套位移來替代受擾過程,為工程應(yīng)用提供有效參考。
考慮采用Dryden 紊流模型[16]來生成高度方向和側(cè)向紊流干擾Δwywind和Δwzwind。首先選取均值為0、方差為1 的近似高斯分布隨機數(shù)列[17],然后通過Dryden 譜密度函數(shù)生成成型濾波器,進而獲得對應(yīng)的紊流干擾序列。選取高度方向和側(cè)向的紊流干擾譜密度函數(shù)如下所示:
式中:ωy,z為紊流的空間頻率,Lwy,z為對應(yīng)高度的紊流尺度,σwy,z為對應(yīng)高度的均方根紊流強度,V為飛行速度。
得到高度方向和側(cè)向紊流干擾序列后,采用簡化的二階動態(tài)環(huán)節(jié)來描述由大氣紊流引起的錐套高度方向位移和側(cè)向位移:
式中:二階動態(tài)環(huán)節(jié)中的各參數(shù)取決于錐套的運動特性。
1.4 加油機尾流風(fēng)擾及干擾力矩建模
加油機尾流的存在使得受油機接近加油錐套的過程中面臨強烈的干擾,需建立尾流風(fēng)擾等效模型以描述其對受油機的影響。加油機后尾流區(qū)域由取決于坐標(biāo)和的影響函數(shù)Fwake確定:
式中:0 ≤fywake≤1,0 ≤fzwake≤1。則尾流干擾分量Δwydist和Δwzdist由下列工程模型決定:
尾流干擾建模側(cè)重描述對速度系下迎角和側(cè)滑角的影響,此外,受油機進入加油機尾部區(qū)域時,還會受到額外的滾轉(zhuǎn)干擾力矩與俯仰干擾力矩,工程模型建立如下所示:
式中:0 ≤fxvort≤1,0 ≤fyvort≤1,為關(guān)于和變化的增益函數(shù);zwing為機翼位置坐標(biāo)的側(cè)向分量;Kxvort和Kzvort為渦流參數(shù);mxvort和mzvort分別為受渦流影響的滾轉(zhuǎn)干擾力矩和俯仰干擾力矩的塑形函數(shù),受與機翼坐標(biāo)zwing之間的距離影響,決定了渦流干擾力矩的變化規(guī)律。
2 空中自主加油綜合控制律設(shè)計
在軟管式空中加油任務(wù)中,受油探管接近加油錐套的過程會使得加/受油機面臨顯著的外部氣流干擾以及內(nèi)部氣動模型擾動。因此加油設(shè)備對接控制是最為重要的一環(huán),包括位置跟蹤保持控制和姿態(tài)對接控制。針對其中的姿態(tài)對接控制環(huán),設(shè)計一種基于滑模觀測器的自適應(yīng)擾動抑制控制器,以實現(xiàn)高精度的空中自主加油對接控制。
基于滑模觀測器的自適應(yīng)擾動抑制控制以動態(tài)逆控制律為基線,引入滑模干擾觀測器進行姿態(tài)環(huán)擾動補償,同時在角速率環(huán)引入自適應(yīng)干擾抑制模塊,以提高對接控制器的精度和魯棒性。
2.1 姿態(tài)環(huán)滑模干擾觀測器設(shè)計
有多入多出仿射非線性不確定系統(tǒng)如下所示:
式中:Dlum(x,t)為集總干擾項,包括外部干擾和模型不確定性。
引入虛擬控制量Λ=ωd(xc-x),則受擾系統(tǒng)(16)的動態(tài)逆控制律可以寫為:
在控制律(17)中,Dlum為未知量,導(dǎo)致控制量uδ在實際控制場景中無法求得。為了解決該問題,首先忽略其中的Dlum,得到標(biāo)稱控制律:
然后引入滑模干擾觀測器來估計集總干擾Dlum以補償標(biāo)稱控制律。設(shè)滑模干擾觀測器的估計結(jié)果為,那么擾動補償控制律可以寫為:
綜上所述,基于滑模干擾觀測器補償?shù)膭討B(tài)逆控制律可以寫為uδ=uδ,n+uδ,o。
設(shè)計一種基于超螺旋算法的滑模干擾觀測器。單入單出超螺旋算法可以通過分析擾動非線性微分方程來獲得[18]:
式中:?(t)是未知有界擾動且≤Q,Q是擾動微分的上界;w1,w2為權(quán)重系數(shù)。當(dāng)w1≥1.5Q且w2≥1.時,式(20)的解及其微分量均在有限時間內(nèi)收斂至零[19]。對于多入多出情況下的|·|絕對值運算,規(guī)定對其各元素求絕對值,向量形式不變。
對于非線性不確定系統(tǒng)式(16),滑模擾動觀測器可以構(gòu)建為[20]:
對滑模面s求導(dǎo),并將系統(tǒng)方程(16)代入,可得,因此將在有限時間內(nèi)收斂于Dlum。其中向量的|·|1 2運算規(guī)定為對其各元素的絕對值開根號,向量形式不變。
基于奇異攝動理論,受油機狀態(tài)變量可以分為快、慢變量,姿態(tài)角x1=[γ ψ θ]T為慢變量,角速率x2=[ωx ωy ωz]T為快變量。
面向慢變量,在基線動態(tài)逆控制律的外環(huán)引入基于超螺旋算法的二階滑模干擾觀測器進行外部擾動補償。滑模觀測器補償下的動態(tài)逆外環(huán)控制律如下所示[21]:
式中:x2c表示動態(tài)逆外環(huán)的控制指令,即角速率指令組成的向量;下標(biāo)s 表示慢回路中的變量。在具體計算中,常常引入增益矩陣Κs,使得x2δ,o等效于。
2.2 角速率環(huán)自適應(yīng)干擾抑制模塊設(shè)計
式中:Kω為內(nèi)環(huán)控制律增益,ωc為期望角速率。將角速率動力學(xué)方程寫為關(guān)于期望狀態(tài)的比例形式,其余的所有項統(tǒng)一寫為集總擾動項ε[22]:
式中:uadp為內(nèi)環(huán)自適應(yīng)干擾抑制項,且uadp=I-1ΔM,ΔM為抑制干擾的增量力矩向量。
對式(24)和式(25)作差求得誤差動力學(xué)方程:
對微分方程式(26)進行拉氏變換:
定義自適應(yīng)項uadp?Kadp(s),Kadp為自適應(yīng)干擾抑制增益。由定義式可以看出自適應(yīng)項uadp可以抵消ε的長時影響從而實現(xiàn)對動態(tài)逆內(nèi)環(huán)控制律的自適應(yīng)干擾抑制,最終內(nèi)環(huán)控制律可以寫為:
綜上所述,面向空中自主加油的基于滑模觀測器的自適應(yīng)干擾抑制控制器結(jié)構(gòu)如圖2所示。

圖2 基于滑模觀測器的自適應(yīng)干擾抑制控制結(jié)構(gòu)框圖Fig.2 Block diagram of sliding-mode observer-based adaptive interference suppression control structure
圖2中,滑模干擾觀測器的輸入是外環(huán)集總干擾Dlum,s的觀測值和控制量u1即x2,輸出是外環(huán)補償控制律x2δ,o;自適應(yīng)模塊通過角速率觀測誤差構(gòu)造自適應(yīng)項以抑制不確定性干擾。
3 仿真校驗
3.1 氣動擾動模型仿真校驗
面向空中加油過程中的氣動擾動建立了大氣紊流干擾和受油機前繞流對錐套位置的影響模型、加油機尾流風(fēng)擾等效模型以及渦流擾動力矩模型。
針對大氣紊流擾動下的錐套位置偏移,采用Dryden 紊流模型生成高度方向和側(cè)向陣風(fēng)干擾,進而求出錐套高度方向偏移和側(cè)向偏移。Dryden 模型的輸入為飛行速度和白噪聲,其中飛行速度取150 m/s,高度方向白噪聲取隨機數(shù)種子21 162,側(cè)向白噪聲取隨機數(shù)種子51 161,功率譜密度幅值均取3.0。錐套高度方向和側(cè)向位置偏移模型中二階動態(tài)環(huán)節(jié)的各參數(shù)選擇為:by=48.1,ay1=0.249,ay0=4.6;bz=41.7,az1=0.191,az0=3.87。得到紊流擾動下錐套在垂直面和水平面的位置振蕩時序曲線,如圖3所示。
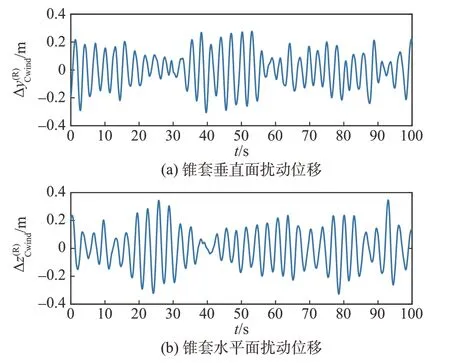
圖3 紊流下錐套在垂直面和水平面的擾動位移曲線Fig.3 Displacement curve of the drogue on the vertical and horizontal planes under turbulence
對于加油機尾流擾動等效模型,基于試驗數(shù)據(jù)可以得到高度方向影響函數(shù)fywake關(guān)于和的歸一化數(shù)值分布區(qū)域,以及側(cè)向影響函數(shù)fzwake關(guān)于和的歸一化數(shù)值分布區(qū)域。在尾流影響區(qū)域內(nèi),與紊流擾動共同作用,對受油機的氣流角產(chǎn)生影響。高度方向影響函數(shù)fywake和側(cè)向影響函數(shù)fzwake的歸一化數(shù)值分布區(qū)域圖如圖4和圖5所示。

圖4 高度方向尾流影響函數(shù)歸一化數(shù)值分布區(qū)域Fig.4 Normalized value distribution area of the wake influence function in the height direction
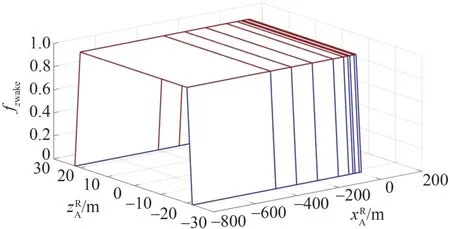
圖5 側(cè)向尾流影響函數(shù)歸一化數(shù)值分布區(qū)域Fig.5 Normalized value distribution area of the wake influence function in the lateral direction
由加油機尾流對受油機的高度方向和側(cè)向歸一化影響函數(shù)的分布區(qū)域圖可知,加油機尾流只會對處于其下方的受油機產(chǎn)生擾動影響,該擾動隨著加/受油機相對高度和前向距離的減小而增大;尾流的側(cè)向影響區(qū)域?qū)ΨQ分布在加油機的左右空間,該擾動不隨前向距離變化,但只影響處于加油機后方的受油機。
對加油機單側(cè)左部渦流產(chǎn)生的擾動力矩等效模型進行仿真驗證,渦流對受油機產(chǎn)生的擾動力矩等效模型中0 ≤fxvort≤1,0 ≤fyvort≤1;機翼坐標(biāo)zwing取為20 m;Kxvort和Kzvort均取為0.1,可以得到加油機單側(cè)渦流引起的擾動力矩系數(shù)與受油機到渦流中心距離的關(guān)系曲線,如圖6所示。
圖6 擾動力矩系數(shù)與到渦流中心距離的關(guān)系曲線Fig.6 Function curve of perturbation moment coefficient about the distance to the center of vortex
由圖6可知,處于渦心位置時,滾轉(zhuǎn)擾動力矩系數(shù)達到正向最大值,而此時俯仰擾動力矩系數(shù)為0;距離渦心約1.5 m處,俯仰擾動力矩系數(shù)達到正向最大值。距離渦心約±2.5 m處,滾轉(zhuǎn)擾動力矩系數(shù)達到負向最大值;距離渦心約-1.5 m處,俯仰擾動力矩系數(shù)達到負向最大值。
3.2 空中自主加油對接控制仿真校驗
在空中自主加油過程中,受油探管接近加油錐套并實現(xiàn)對接輸油的視景仿真結(jié)果如圖7所示。

圖7 空中自主加油視景仿真結(jié)果Fig.7 Visual simulation results of aerial refueling
圖7展示了受油探管對加油錐套的跟蹤與對接過程的視景仿真結(jié)果。
對接控制過程中滑模觀測器對姿態(tài)環(huán)擾動的估計結(jié)果如圖8所示。

圖8 基于滑模觀測器的干擾估計結(jié)果Fig.8 Disturbance estimation results based on the sliding mode observer
圖8中,對姿態(tài)角γ,ψ和θ中干擾輸入的觀測均方根誤差分別為0.02、0.05 和0.03,說明所設(shè)計的滑模觀測器能夠有效估計姿態(tài)干擾。
采用基于滑模觀測器的自適應(yīng)干擾抑制控制方法和常規(guī)比例微分積分控制方法分別實現(xiàn)擾動情況下的空中加油對接,得到探管與錐套的位置變化曲線如圖9所示。
圖9 加油對接過程中探管與錐套位置變化曲線Fig.9 Position change curve of the probe and the drogue during the aerial refueling docking process
由仿真結(jié)果可知,在45 s 左右實現(xiàn)了探管與錐套的對接,基于滑模觀測器的干擾抑制控制方法相較于常規(guī)控制,具有降低0.3 m 高度波動的能力;在側(cè)向跟蹤控制中,探管首次跟上錐套的時間由16.3 s 降低到9.7 s,提升了68%。
對接控制過程中,兩種控制方法下受油機的姿態(tài)仿真結(jié)果如圖10所示。
圖10 加油對接過程中受油機姿態(tài)變化曲線Fig.10 Attitude change curve of the receiver during the aerial refueling docking process
圖10中,在25~45 s 的擾動區(qū)間內(nèi),所設(shè)計的自適應(yīng)控制方法通過觀測器估計擾動并進行抑制,有效減小了受油機的姿態(tài)波動,使γ和ψ的波動平均分別降低了94.8%和92.7%;在35~45 s 的擾動區(qū)間內(nèi),使θ的波動平均降低了14.9%。
空中自主對接控制中,受油機的舵面使用情況為滾轉(zhuǎn)和俯仰控制使用復(fù)用舵面,偏航控制使用方向舵,各舵面的偏轉(zhuǎn)情況如圖11所示。
圖11 加油對接過程中受油機舵面偏轉(zhuǎn)曲線Fig.11 Control surface deflection curve of the receiver during the aerial refueling docking phase
圖11中,δFiL和δFiR為左、右復(fù)用舵面偏轉(zhuǎn),δRud為方向舵偏轉(zhuǎn)。自適應(yīng)干擾抑制控制方法下,復(fù)用舵面和方向舵的偏轉(zhuǎn)振蕩得到了有效抑制,同時在45 s 左右的對接時刻,避免了出舵量的突變,保證了加油過程中的穩(wěn)定對接。
4 結(jié)論
對于復(fù)雜氣動干擾下的空中自主加油對接控制問題,本文建立了相關(guān)氣流擾動模型,包括大氣紊流和受油機前繞流對錐套位置的推離模型、加油機尾流風(fēng)擾等效模型及其對受油機的擾動力矩模型,以工程模型的形式描述了復(fù)雜氣動干擾,提升了地面仿真對真實工況的近似精度。同時,面向加油對接過程設(shè)計了基于二階滑模觀測器的自適應(yīng)干擾抑制控制器,實現(xiàn)了基線動態(tài)逆的干擾抑制與補償控制。通過綜合視景仿真平臺驗證了該方法的有效性,能夠?qū)崿F(xiàn)受油探管對錐套中心的精確跟蹤與對接。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19