工業機器人擾動觀測器設計及在線補償魯棒控制
2024-05-27 14:31:06崔建鵬馮真鵬龐勇杰
現代工業經濟和信息化 2024年2期
崔建鵬, 馮真鵬, 龐勇杰
(開封大學機械與汽車工程學院, 河南 開封 475000)
0 引言
工業機器人具備操作方式靈活,控制精度高等優勢,已成為大型機械部件加工、高精密機械控制系統的重要生產工具[1-2]。利用運動學參數調整的方式控制幾何誤差。喬貴方[3]提出了一種具有代表性的研究結果,構建了一種包含各項幾何誤差的校準模型。目前,在線補償方法容易受到外部因素的干擾[4],一旦遇到負載突變時便會形成很大誤差,無法實現快速修正的目標。由此可見,急需開發一種適合在線補償的新算法。
相關方面的研究吸引了很多的學者。周健等[5]提出了一種基于定長記憶窗增量學習的機器人定位誤差在線自適應補償方法,解決了機器人性能退化影響位姿映射模型適用性的問題,確保算法的補償精度穩定在目標精度。焦嘉琛等[6]提出一種耦合運動學誤差與載荷柔性誤差的機器人作業誤差分級補償策略,實現了機器人控制指令的離線修正,通過在線采集作業載荷實現了對載荷所引起柔性誤差的在線預測。
根據以上關于工業機器人在線補償還需優化的情況,本文開發了一種根據擾動觀測器實現的魯棒控制技術。
1 工業機器人的位置控制模型
本文采用適合工業機器人應用需求的位置環控制方式構建控制器系統。實際運動控制模型通常被封裝于工業機器人位置控制系統中,可以利用運動控制參數來獲取加減速曲線、加速度,并不需要對機器人底層控制器進行訪問。構建如下位置控制模型:
式中:A為狀態矩陣;B為輸入矩陣;D為擾動矩陣。
2 工業機器人擾動觀測器設計
2.1 擾動觀測器設計
構建了一種二階觀測器估計系統擾動項,動態表達式如下:
式中:ri1與ri2均為輔助變量;si1與si2均為觀測器參數。設置以下觀測誤差:
2.2 滑模控制器設計
1)構建以下滑模面表達式:
式中:ρ 為控制系數變量。
2)構建以下的控制律計算式:
式中:b為調整次數;k1和k2為增益調節系數。
3)滿足k1>0,k2>0 的條件,兩者都屬于控制增益,建立以下飽和函數sat(σ):
控制器具體控制過程見圖1。
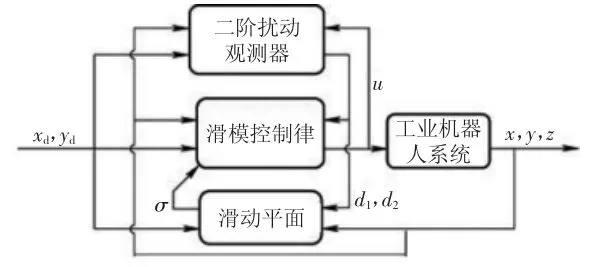
圖1 魯棒控制原理圖
3 試驗驗證
圖2 顯示了工業機器人閉環控制具體裝置結構。采用COMAUSMART5NJ165 型工業機器人進行測試,共包含6 個自由度,可以實現0.085 mm 的定位控制精度,可承受的載荷最大值為165 kg。同時配備了Radian2 激光跟蹤儀作為測試設備,可以實現15 μm+5 μm/m 的精度指標。

圖2 工業機器人閉環控制系統試驗裝置
本文采用C 語言程序構建得到以擾動觀測器實現的魯棒算法,并測試了該算法對Linux 控制器的調控性能。閉環控制頻率可以達到2 500 Hz,能夠實現實時控制目標。
為測試本文DOBC 控制方法相對其它在線補償模式的優點,根據PID 控制器在線補償方法開展比較,再對無在線補償條件下的機器人軌跡追蹤進行測試確定在線補償性能差異。測試期間為各控制方法設置以下參數:
1)DOBC 在線補償。設定s11與s21為25,s12、s22為10,ρ 為5,k1為10,k2為5,ε 為0.5,根據之前識別結果設定系統參數與輸入增益。
2)PID 在線補償。kp取值為2,kd取值為0.1,ki取值為5,以上參數依次對應追蹤誤差比例、微分與積分項經過增益計算的結果。
3)無在線補償。未設置在線補償的情況下,機器人追蹤誤差相對PID 與DOBC 在線補償方式更大,特別是在第25 s 以加入重物形式產生外部擾動時,未設置在線補償時形成了較大水平振動幅度的誤差模值,也無法收斂到0。表明無在線并不適合對外部擾動的快速修正,不能滿足精確跟蹤控制目標。見圖3。

圖3 笛卡兒空間內機器人追蹤誤差模值
圖4 給出了DOBC 在線補償方法擾動值。圖沿x與y方向運動時,擾動觀測值d1與d2經過小幅度調節后與自身運動過程造成的模型參數變化相匹配,第25 s 設置外部擾動后,z向擾動觀測值發生快速變化,同時對滑模控制器的輸出結果提供驅動力。通過高效識別擾動特征,使得機器人獲得更強魯棒性,從而實現位置的精確追蹤。對于實際應用過程而言,PID在線補償方式難以實現大控制增益,需對誤差進行放大處理才能實現理想補償效果,顯著提高了軌跡追蹤難度。
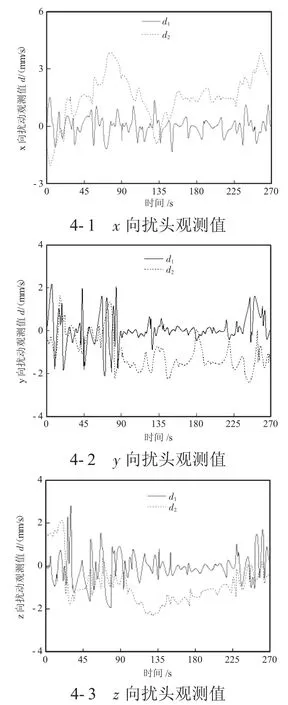
圖4 DOBC 在線補償擾動觀測值
為獲得可靠測試結果,根據以上分析,本文采用同樣處理流程重新測試二次。得到表1 所實驗結果。|e|rms 表示追蹤誤差模值|e|方均根。觀測器控制只達到PID 在線補償39%,相對沒有在線補償只有6%。判斷采用本文基于擾動觀測器實現的魯棒控制算法能夠獲得更高絕對定位精度。

表1 不同在線補償控制方法的測試結果
4 結論
本文開展工業機器人擾動觀測器設計及在線補償魯棒控制分析,取得如下有益結果:
1)DOBC 在線補償方法通過高效識別擾動特征,使得機器人獲得更強魯棒性,從而實現位置的精確追蹤,顯著提高了軌跡追蹤難度。
2)分析追蹤誤差模值,采用本文基于擾動觀測器實現的魯棒控制算法能夠獲得更高絕對定位精度,對應復雜工況具備更優軌跡跟蹤性能。