基于變特性約束濾波的GNSS 車輛信息網絡系統定位
2024-05-27 14:31:06馬彩蘭
現代工業經濟和信息化 2024年2期
關鍵詞:卡爾曼濾波
馬彩蘭
(周口職業技術學院汽車與機電工程學院, 河南 周口 466000)
0 引言
國外較早就開始應用全球定位系統(GPS)技術對車輛實施信息傳輸、定位分析和安全保障等,并取得了一定的成果,尤其是一些歐美國家已經形成了一定的技術優勢[1-2]。根據現有條件下鐵路系統需達到的車輛定位要求分析可知,建立在全球導航衛星系統(GNSS)基礎上的車輛定位技術開發具備廣闊發展空間[3-4]。
北斗衛星導航系統(BDS)可以有效支持我國的運輸系統安全,同時也極大促進了鐵路系統的進一步發展。目前,BDS 已被廣泛應用于我國的整體交通系統建設,可以提供高效、安全、穩定的定位服務功能[5]。
卡爾曼濾波屬于一類綜合運用GNSS 和信息網絡系統(INS)技術進行導航的算法,需要采用最小線性方差估計的方法進行分析[6]。采用卡爾曼濾波方法建立模型時包含均值等于0 的隨機噪聲信號。為了進一步為車輛提供準確的位置數據信息以確保其安全穩定運行,本文設計了一種基于變特性約束濾波算法的GNSS 車輛定位方法,并開展仿真分析。
1 模型建立及系統設計
1.1 變特性約束模型
在當前各類先進科技獲得不斷應用的情況下,車輛的定位能力也需要持續提升。BDS 可以為車輛的運行過程提供全面的定位服務,確保達到安全運行的目標[7]。但考慮到在衛星信號傳輸期間遇到周邊物體遮擋等干擾時很可能出現信息丟失的問題,另外還要全面分析衛星星座、外界電磁變化、信號衰減、多徑效應等,因此采用BDS 對車輛運行過程進行定位時應采取合理的彌補措施來克服上述不足之處,從而實現對車輛空間位置進行實時精確定位的功能[8]。
對采用卡爾曼濾波方法時,需要先計算出系統的噪聲協方差矩陣,但考慮到實際情況的復雜性,因此無法實現準確的確定。
1.1.1 構建系統方程確定系統狀態及其量測方程:
式中:w與v分別為車輛行駛階段產生的噪聲與量測得到的噪聲參數,屬于無關聯白噪聲;F為位置調節矩陣。
1.1.2 對散列過濾器實施初始化[9]
經過初始化得到狀態及協方差參數P0為:
1.1.3 估算各時刻的狀態
1)設定參數矩陣Gk,以此表示加權噪聲發生的偏移量。提高Gk代表過程噪聲偏移分量增加,從而降低均方差誤差。當Gk=0 時,對應的過程噪聲等于零,表現為明顯的卡爾曼濾波特性。
2)估算狀態方程。
式中:Vk+1為中間變量;Dk+1為狀態矩陣;Pk為k時形成的協方差。
1.2 車輛定位系統
車輛定位系統的研究吸引了很多的研究學者。祝浩祈等[9]提出了一種GNSS 載波相位實時動態差分(RTK)+載波相位時間差分(TDCP)/INS 實時精密定位方法,多系統GNSS 的TDCP 解算成功率接近90%。朱東琴等[10]提出了一種基于期望最大化(EM)的交互式多模型車載組合導航算法,建立了基于零速約束的SINS/OD 組合導航模型,利用交互式多模型算法實現了在GNSS 信號丟失情況下的導航模型交互融合,提高了車載組合導航系統精度。張子騰等提出了一種基于約束優化的多傳感器車載室內外定位方法,設計聯合GNSS/IMU/激光雷達的多源融合定位系統,在狀態更新模型的基礎上,分析了車輛連續起伏過程受力方程約束低成本MEMS 高程震蕩,設計引入RTK 解析狀態監測評估約束GNSS 可用性。本文在其基礎上,設計了系統實現方案。
現階段,車載系統通常選擇C2/C3 一體化方法進行設計,并且基本采用分布式結構,對于300T 車載雙系冷備進行分析可知,其核心控制模塊屬于一種“單硬件雙軟件”結構,通過車輛定位系統Profibus 總線跟車輛MVB 雙總線在不同模塊下進行連接。圖1 為車輛定位系統具體組成結構。
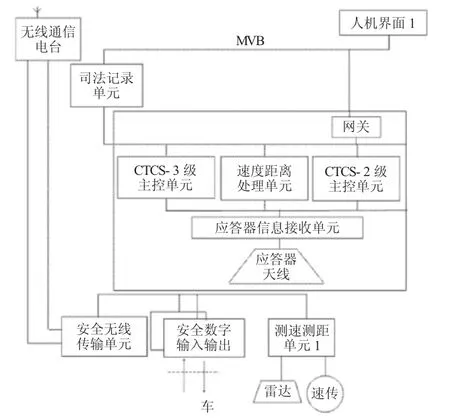
圖1 車輛定位系統具體組成結構
2 仿真驗證與分析
通過蒙特卡羅方法模擬車輛的定位過程,開展變特性約束下濾波算法性能評價,并與其它算法進行了比較。不同算法下經過100 次蒙特卡羅模擬得到平均距離誤差如圖2 所示。
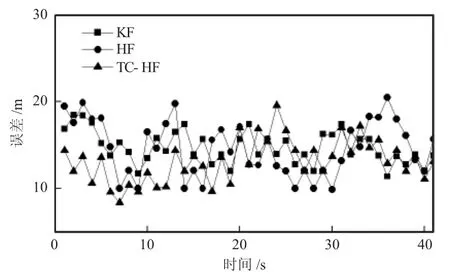
圖2 平均距離誤差
由圖2 可以明顯發現,散列過濾器(HF)算法達到了比卡爾曼濾波(KF)算法更優的定位精度并具備更穩定的狀態。根據圖2 可知,HF 與變特性約束下散列過濾器(TC-HF)曲線形成了較為平緩的變化趨勢,變特性約束下卡爾曼濾波(TC-KF)與KF 曲線則形成了明顯突出的特點,由此可見定位存在失準的情況。這說明設置變特性約束條件的濾波算法可以有效提升定位精度,同時發現HF 算法表現出更優的魯棒性,更好地滿足了車輛不斷變化的運動特征。
為了證明本文TC-HF 濾波算法在處理車輛定位中應用的先進性,以三種濾波算法進行模擬得到的軌跡平均距離誤差,對各項參數進行統計,得到蒙特卡羅仿真統計如表1 所示。
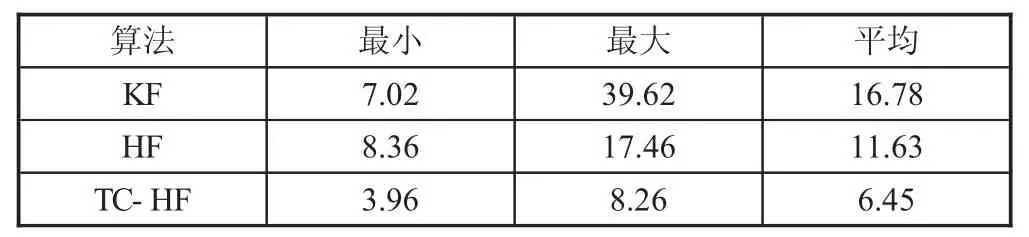
表1 蒙特卡羅仿真統計 單位:m
根據表1 可知,通過最小距離和最大距離可以看出算法計算的區間幅度。可以看出來,相比較KF 和HF 算法,TC-HF 的區間幅度是最小的,表現出來更高的定位精度。采用KF 算法進行分析時,在沒有設置約束條件時以KF 算法計算得到的平均距離誤差為13.35 m;當存在約束條件時HF 得到的平均距離誤差為10.02 m;當存在約束條件時TC-HF 得到的平均距離誤差只有6.71 m,由此可見設置變特性約束能夠使定位精度獲得顯著提升。
總體上,根據以上分析可知,設置變特性約束的條件下,TC-KF 方法能夠有效改善定位精度。
3 結論
1)經過模擬發現HF 算法達到了比KF 算法更優的定位精度,并具備更穩定的計算狀態。
2)設置變特性約束條件的濾波算法可以有效提升定位精度,HF 算法表現出更優的魯棒性,更好地滿足了車輛不斷變化的運動特征。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36