基于PID 控制系統(tǒng)的MATLAB 氣缸夾爪仿真與研究
2024-05-27 14:31:10李自成田玉容袁婷薇鄭國先何佳佳
現(xiàn)代工業(yè)經(jīng)濟和信息化 2024年2期
趙 鑫, 李自成, 田玉容, 袁婷薇, 鄭國先, 何佳佳
(成都理工大學工程技術(shù)學院, 四川 樂山 614000)
0 引言
在現(xiàn)代工業(yè)生產(chǎn)中,提高生產(chǎn)效率是企業(yè)追求的重要目標。隨著科技的不斷進步,氣缸夾爪作為一種高度智能化的裝置,可以幫助企業(yè)打造高效的生產(chǎn)線,有效提高企業(yè)生產(chǎn)效率。通過對抓取剛性大不易變形物體的研究,設(shè)計了基于MATLAB 仿真的氣動爪夾,采用PID 控制來實現(xiàn)研究過程中的最優(yōu)控制。采用MATLAB 仿真軟件對所建立的系統(tǒng)數(shù)學模型進行仿真分析研究。對于傳統(tǒng)工業(yè)夾爪而言,氣缸夾爪結(jié)構(gòu)簡單、實用性強、操作簡便,能夠穩(wěn)定的抓住體積小、剛性大的堅固物體,并且能同時滿足對于物體不同情況的條件進行自動調(diào)節(jié)。市面上的常見夾爪,一部分能夠預(yù)先設(shè)定力量以及體積大小的值來對物品進行抓取,而氣缸夾爪的優(yōu)勢在于能夠?qū)ψ陨磉M行自動調(diào)節(jié)來適應(yīng)物體的大小與輕重。PID 控制作為一種非常常見的智能控制算法,對工業(yè)過程中存在的滯后、慣性和非線性等問題具有良好的控制效果,所以為了能夠更好地控制自動調(diào)節(jié)的平穩(wěn)性,可以采用PID 進行控制,通過PID 控制給出的反饋信號進行處理,計算出控制量,從而輸出給控制器,使系統(tǒng)達到期望狀態(tài)。系統(tǒng)的誤差情況利用比例、積分、微分進行計算。因此,可以根據(jù)系統(tǒng)需求在線調(diào)整PID 參數(shù),實現(xiàn)對爪夾的控制。
1 MHZ2-40D 氣缸夾爪的結(jié)構(gòu)與原理
1.1 MHZ2-40D 氣缸夾爪的組成結(jié)構(gòu)(圖1)

圖1 MHZ2-40D 氣缸夾爪結(jié)構(gòu)
1)氣缸:氣缸是氣缸夾爪的主要組成部分,它是一個空心的圓柱體,內(nèi)部有活塞和密封件。氣缸通過控制進氣和排氣來實現(xiàn)活塞的運動,驅(qū)動夾爪的開合動作。
2)活塞桿:活塞桿是連接在氣缸活塞上的桿狀零件。它負責將氣缸的運動傳遞給夾爪,使夾爪能夠?qū)崿F(xiàn)夾持和釋放物體的功能。
3)夾爪:夾爪是氣缸夾爪的工作部分,通常由可移動的爪子和固定的底座組成。爪子可以通過氣缸的運動實現(xiàn)開合動作,用于夾持和釋放物體[1]。
4)控制閥:控制閥是用于控制氣缸的進氣和排氣的裝置。它根據(jù)控制信號的輸入,控制氣源的流動,從而控制氣缸的運動狀態(tài)。
5)傳感器:傳感器通常安裝在氣缸夾爪上,用于檢測夾爪的位置和狀態(tài)。常見的傳感器包括接近開關(guān)、壓力傳感器等。傳感器可以提供反饋信號,用于監(jiān)測和控制夾爪的運動。
6)氣源供應(yīng)系統(tǒng):氣源供應(yīng)系統(tǒng)提供壓縮空氣作為氣缸夾爪的動力源。它包括氣源裝置、壓縮空氣管道、過濾器、調(diào)壓閥等組件,確保氣缸夾爪能夠獲得穩(wěn)定的氣源供應(yīng)。
1.2 MHZ2-40D 氣缸夾爪的工作原理
通過調(diào)節(jié)控制閥控制氣缸的工作狀態(tài)。控制閥根據(jù)控制信號的輸入,控制氣缸的進氣和排氣。當控制閥打開進氣通道時,空氣進入氣缸的氣腔,氣腔內(nèi)的壓強增大,驅(qū)動活塞向前運動,夾爪閉合夾持物體。當控制閥打開排氣通道時,氣缸的氣腔排出氣體,氣腔內(nèi)的壓強減小,活塞向后運動,夾爪打開釋放物體。另外通過PID 控制算法的調(diào)節(jié),根據(jù)設(shè)定值和反饋信號的差異來控制輸出信號,進而控制氣缸夾爪的運動,使其逐漸接近設(shè)定值。PID 控制可以實現(xiàn)精確的位置或力控制,提高夾爪的準確性和穩(wěn)定性[2]。
2 PID 控制原理
1)設(shè)定值(Setpoint):PID 控制需要設(shè)定一個目標值,即夾爪希望達到的位置或力的設(shè)定值。
2)反饋信號(Feedback):通過傳感器獲取夾爪的實際位置或力的反饋信號。
3)誤差計算(Error Calculation):根據(jù)設(shè)定值和反饋信號計算誤差,即偏離目標值的差異。誤差可以通過將設(shè)定值減去反饋信號來計算得到。
4)PID 控制算法(PID Control Algorithm):PID 控制算法由比例(P)、積分(I)和微分(D)三個部分組成。
5)比例控制(Proportional Control):根據(jù)誤差的大小產(chǎn)生輸出信號。比例控制作用于減小誤差,其輸出信號與誤差成正比。
6)積分控制(Integral Control):根據(jù)誤差的持續(xù)時間產(chǎn)生輸出信號。積分控制可以消除靜態(tài)誤差,并減小系統(tǒng)的穩(wěn)態(tài)誤差。它的輸出信號與誤差的累積值成正比。
7)微分控制(Derivative Control):根據(jù)誤差的變化率產(chǎn)生輸出信號。微分控制可以減小系統(tǒng)的超調(diào)和震蕩,使系統(tǒng)更加穩(wěn)定。它的輸出信號與誤差的變化率成正比[3]。
PID 控制算法的輸出信號可以通過將比例、積分和微分部分的輸出信號相加來計算得到。
8)輸出信號(Output):PID 控制算法計算得到的輸出信號將被應(yīng)用于控制閥,控制閥通過調(diào)節(jié)氣源的流量來控制氣缸的進氣和排氣。輸出信號的大小和方向?qū)⒂绊憵飧讑A爪的運動。
9)夾爪運動:根據(jù)控制閥的控制信號,氣缸的進氣和排氣狀態(tài)將發(fā)生變化,從而驅(qū)動夾爪的開合運動。夾爪根據(jù)氣缸的運動狀態(tài)實現(xiàn)對物體的夾持和釋放。
近年來,現(xiàn)代控制理論得到了快速發(fā)展,而在實際工程中由于PID 控制多重應(yīng)用型優(yōu)點(如,結(jié)構(gòu)簡單、調(diào)整方便、穩(wěn)定性好、工作可靠等),因此它還是應(yīng)用最廣泛的調(diào)節(jié)器控制規(guī)律。此外,PID 控制應(yīng)用領(lǐng)域極為廣泛,可將其應(yīng)用于電力、化工、輕工、冶金以及機械等工業(yè)過程控制中。通常情況下,最適合采用PID 控制技術(shù)的條件是:當對目標系統(tǒng)或被控對象的內(nèi)部特征不完全清楚時,或者是系統(tǒng)的全部參數(shù)不能經(jīng)過有效的測量手段來獲取,同時必須依賴于經(jīng)驗和現(xiàn)場調(diào)試來確定系統(tǒng)控制器的結(jié)構(gòu)參數(shù)情況下采用該技術(shù)[4]。
3 數(shù)學建模與分析
基于MHZ2-40D 氣缸夾爪在PID 控制下的數(shù)學模型可以通過建立氣缸系統(tǒng)的動力學方程來描述。
3.1 氣缸系統(tǒng)的動力學方程
根據(jù)氣缸的運動原理和動力學理論,可以得到如下的動力學方程:
式中:m為氣缸夾爪的質(zhì)量;x(t)為氣缸夾爪的位置關(guān)于時間t的函數(shù);F(t)為施加在氣缸夾爪上的外部力;Ff為摩擦力,與速度相關(guān);Fs為彈簧力,與氣缸夾爪的位置相關(guān)[5]。
3.2 摩擦力模型
摩擦力通常可以使用線性摩擦模型來近似描述:
式中:μ 為摩擦系數(shù);v(t)為氣缸夾爪的速度關(guān)于時間t的導(dǎo)數(shù)。
3.3 彈簧力模型
彈簧力可以使用線性彈簧模型來近似描述:
式中:k為彈簧的剛度系數(shù);x0為彈簧的平衡位置。
3.4 PID 控制器模型
PID 控制器可以通過對系統(tǒng)的輸出進行反饋控制來調(diào)整輸入信號。PID 控制器的輸出可以表示為:
式中:u(t)為PID 控制器的輸出,作為外部力F(t)的控制信號;Kp、Ki和Kd分別為PID 控制器的比例增益、積分時間和微分時間;e(t)為控制誤差,定義為期望位置與實際位置之間的差異:
式中:de(t)/dt為控制誤差的導(dǎo)數(shù),即速度誤差。
根據(jù)MHZ2-40D 氣缸夾爪在PID 控制下的數(shù)學模型,整合動力學方程和PID 控制器模型,可以得到整合后的傳遞函數(shù)模型[6]。
首先,將動力學方程進行拉普拉斯變換,得到:
式中:X(s)為氣缸夾爪的位置的拉普拉斯變換;U(s)為輸入信號的拉普拉斯變換;Ff為摩擦力的拉普拉斯變換;Fs為彈簧力的拉普拉斯變換。
根據(jù)摩擦力模型和彈簧力模型的表達式,可以得到:
將上述表達式代入動力學方程,得到:
整理后,得到:
定義傳遞函數(shù)G(s)=X(s)/U(s),可以得到:
然后,將PID 控制器模型的輸出信號u(t)和控制誤差e(t)進行拉普拉斯變換,可以得到:
將上述表達式代入傳遞函數(shù)G(s)中,得到整合后的傳遞函數(shù)模型:
4 系統(tǒng)仿真
將系統(tǒng)各項參數(shù)代入(14)式,得到氣缸夾爪PID控制的傳遞函數(shù):
從MATLAB/simulink 中選取所需元器件,連接好各元器件,設(shè)置好相關(guān)參數(shù),點擊進行仿真,仿真結(jié)果具體見圖2。得到相應(yīng)的結(jié)果[7]。
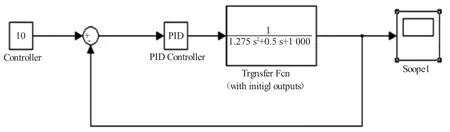
圖2 氣缸夾爪PID 控制模型
從波形上看,在選定對應(yīng)的Kp,Ki以及Kd的數(shù)值之后,能夠很好地利用PID 給出的反饋信號來控制氣動夾爪夾取動作的穩(wěn)定,使其能夠在精準的位置進行夾取。
5 結(jié)論
針對基于PID 控制的全自動氣壓控制系統(tǒng)進行計算和仿真,如圖2 所示,對于氣缸夾爪夾持力和位置的控制也就是通過PID 控制器的輸出信號來進行控制。而PID 控制是根據(jù)設(shè)定值和測量值的偏差,通過計算得出控制信號,通過調(diào)節(jié)控制器中的PID 參數(shù)來達到控制目的。實驗過程中采用Matlab/Simulink 對系統(tǒng)進行仿真,如圖3 所示,結(jié)果表明系統(tǒng)的輸出能夠跟隨輸入信號的增加而增加,且能很快達到新的穩(wěn)定值。說明采用PID 控制系統(tǒng)可以有效且高效的控制氣缸夾爪來抓取體積小、剛性大的物體,很大程度上提高了氣動夾爪的使用效率,對工業(yè)上的操作提供了極大的便利[8]。
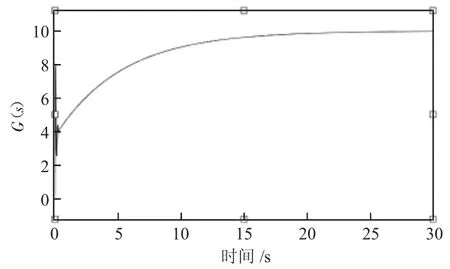
圖3 仿真結(jié)果
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45