無人機傾斜攝影在實景三維模型生產中的優化研究
2024-06-26 11:43:34王龍
電腦知識與技術 2024年13期
關鍵詞:無人機
王龍

摘要:針對城區影像傾斜攝影空三解算易失敗、自動化三維模型存在瓦片接邊色差大、懸浮物、建筑底部結構變形、紋理錯位等問題,文章在研究攝影測量技術的基礎上,對上述問題給出可行的解決方案。文章介紹了傾斜攝影技術,給出了優化空三加密的幾種措施,簡要描述了自動化建模流程,重點分析了模型存在問題的原因,并提出了可行的解決方案。最后,采用實際案例對優化前后的模型進行了比較。通過比較可知,優化后的模型表征質量更好,模型結構更完整,模型精度更高,可以滿足城市三維建模的要求。文章的研究可以為城市精細化實景三維模型的制作提供借鑒。
關鍵詞:無人機;傾斜攝影;空三加密優化;實景三維模型;精細化三維模型
中圖分類號:P231 文獻標識碼:A
文章編號:1009-3044(2024)13-0116-03 開放科學(資源服務)標識碼(OSID) :
0 引言
無人機傾斜攝影技術近年來被廣泛用于農村、城市實景三維模型生產[1]。農村傾斜攝影作業面積小,航攝影像數量少,空三解算通過率高,而且由于樹木等遮擋少,一般模型完整度高[2-3]。三維模型成果主要用來生產高精度地形圖,對模型表征質量要求不高,因此傾斜攝影技術用于農村實景三維模型的生產,其自動化程度高,無須過多地對模型進行優化[4]。城市傾斜攝影一般作業面積大,建筑較高,互相遮擋嚴重,太陽陰影比較深;低空飛行,影像畸變大,在空三解算時,容易出現空三解算失敗的問題[5]。由于航攝影像的特點,導致城區自動化建模成果易出現瓦片接邊色差大、懸浮物多、建筑底部結構變形、紋理錯位等問題[6-7]。一般而言,城市三維模型的建設,其用途更廣,對模型要求更高,因此自動化三維模型無法滿足城市建模要求,須對模型進行精細化處理。本文從上述問題出發,首先介紹了無人機傾斜攝影技術,對空三加密易失敗的原因進行了分析,并提出了幾種優化措施;對自動化建模流程進行了簡述,重點分析了模型存在問題的原因,并給出了解決方案。最后采用實際項目數據,對部分問題模型進行了優化處理,并對優化前后的模型從表征質量、模型結構完整性和模型精度三方面進行了比對分析。通過分析可知,精細化處理后的模型成果更能滿足城市三維模型建設的要求。本文的研究可為城市精細化三維模型建設提供參考。
1 無人機傾斜攝影技術
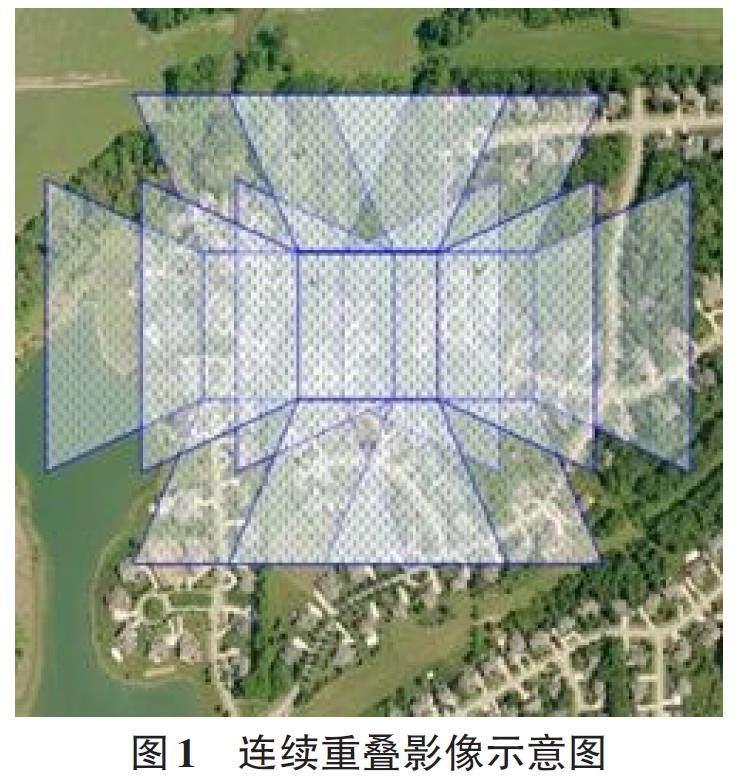
垂直攝影測量是從空中垂直地面進行航攝,而傾斜攝影則是一種搭載多鏡頭,從空中多個角度向地面進行攝影的一種作業方式。由于搭載的鏡頭較多,獲取影像的視角更豐富,因此獲得的影像信息更加豐富,成果種類也更多。傾斜攝影組合通常有2個鏡頭、3個鏡頭、5個鏡頭甚至更多,其中使用最廣泛的是5 個鏡頭。在航攝過程中,隨著無人機沿航線飛行,相機按照一定距離曝光,在航向上獲得連續重疊的影像數據,其示意圖如圖1所示。
2 空三加密優化研究
空三加密是攝影測量數據解算的核心部分。對于傾斜攝影測量來說,由于影像畸變大、冗余度高、影像分辨率差異大,很容易導致空三加密解算失敗。為了提升空三加密的成功率,文章從輸入數據方面入手,給出了幾種優化輸入數據的方案,可以在一定程度上提升空三加密解算的成功率。
2.1 優化相機參數
傾斜相機檢校成本高,能夠提供檢校的場地少,因此在實際作業中,很少對相機進行檢校。多數情況下采用的是相機自檢校,即通過影像之間的關系,在解算影像時優化相機參數。影像數據量大,容易導致解算失敗。在優化相機參數時,可通過少量影像數據解算及平差調整,得到精度更高的相機參數數據。
2.2 提升影像質量
空三加密解算的本質是提取同名點,其在影像中體現為像素值。在受到不同外界因素的影響下,同一地物在不同影像上的像素值是不同的;影像匹配是基于像素完成的,航攝影像存在枕形和桶形兩種畸變。像素值和影像畸變都會影響空三加密解算的結果,因此需要提升影像質量。對于像素值不同的問題,可采用勻色的方式完成,即選擇地物信息豐富的影像作為模板,對所有影像進行勻色處理。對于影像畸變問題,可采用精確的相機參數對影像的畸變進行糾正,也可通過設置蒙板,使影像邊緣數據不參與空三加密,從而提升影像的質量。
2.3 優化POS 數據
目前傾斜設備雖然安裝了多個相機,但是POS記錄設備通常只有一個,負責記錄下視相機曝光時的位置和姿態。對于傾斜攝影來說,雖然不同相機的安裝位置很接近,但存在一定的角度和距離差異。以下視POS數據代替側視POS數據進行解算時,不能準確恢復側視相機曝光時的位置和姿態,因此用下視POS代替側視POS的精度還須進一步提升。為提升POS精度,常用的方法有以下幾種:1) 在已知下視和側視相機安裝位置角度關系的基礎上,以下視POS為基準,結合相機安裝的距離和角度參數,對側視POS數據進行解算;2) 借助第三方軟件,采用數據解算的方式,不斷優化POS數據精度;3) 利用實時差分或者后差分技術,準確解算得到高精度的POS數據結果。
3 自動化三維模型生產
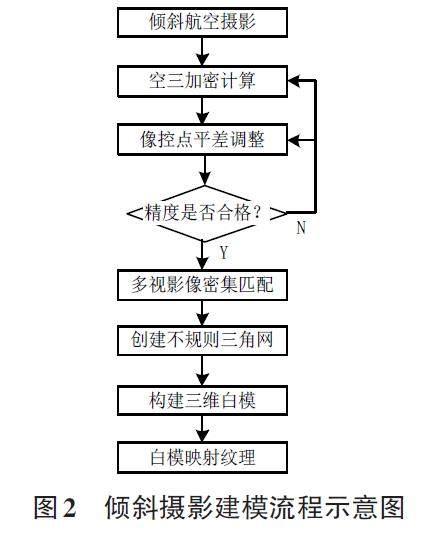
自動化三維模型生產主要包括外業航攝影像數據獲取和內業數據解算,其流程如圖2所示。
4 精細化三維模型生產
4.1 模型問題產生的原因及解決方案
4.1.1 瓦片接邊色差
傾斜攝影由于搭載的相機多且角度朝向不同,因此在航攝過程中,每個相機的進光量是不同的,這導致航拍出來的影像色差差異較大,并且由于建筑物互相遮擋等原因,也導致航攝獲取的影像陰影較大。在建模時,模型成果的最小分塊是瓦片,建模軟件會對瓦片顏色進行整體調整,這也會導致瓦片接邊出現色差。
對于瓦片接邊出現色差問題,目前主要采用兩種方案進行優化。一種是對原始航攝影像進行勻光勻色,這種方式在一定程度上會使影像失真,丟失影像部分信息。另一種方式是利用下視鏡頭影像生成數字正射影像圖,然后將數字正射影像的紋理信息映射到實景三維模型上。由于下視鏡頭始終垂直地面拍攝,其相機曝光時的進光亮度差異不大,建筑物互相遮擋的影響也較小。瓦片分塊采用規則平面格網方式,對高程沒有要求,只須保證平面紋理能夠映射即可。這為正射影像紋理能夠映射到模型上提供了保障。
4.1.2 懸浮物
懸浮物產生的原因是構建的三角網不連續,而三角網的構建是基于多視影像匹配得到的密集點云。對于部分地物,如樹木、路燈等,由于樹干較細,在點云匹配時,匹配得到的點云較少。按照目前構建三角網的算法,由于點云的點太少,構建三角網就不能連續,因此就會出現懸浮物。
對于懸浮物的處理,目前主要采用兩種方案優化。一種是從構建三角網入手,讓軟件盡可能構建完整連續的三角網,另一種是從刪除三角網入手,即將模型場景中的懸浮物刪除。構建連續三角網的前提是得到更密集的點云數據,點云數據的獲取可以采用激光掃描方式獲取,也可以獲取更高分辨率的影像。在影像數據解算時,其最高精度是1/2個像素,一般都是1個像素,密集點云計算是基于像素完成的,影像分辨率越高,每個像素對應的面積更小,同一片區域,可以解算得到更多的點云數據成果。刪除三角網是指將孤立的、與模型場景不粘連在一起的懸浮物刪除,這種方式作業效率高,可操作性強。
4.1.3 建構筑物結構變形與紋理錯位
三維模型結構是通過無數個三角網組建而成,而三角網則是基于密集點云創建的,因此決定三維模型結構的主要是密集點云。在航攝過程中,由于建構筑物互相遮擋,航攝視角存在盲區;在數據解算時,密集點云匹配是基于影像數據的。由于航攝盲區的存在,導致生產的建構筑物模型底部結構變形、紋理錯位。
對于建構筑物結構變形及紋理錯位這種問題,目前主要采用以下幾種方案對模型進行優化:1) 航攝影像數據與地面補拍影像數據融合建模。地面補拍數據可以彌補航攝時建構筑物底部影像數據無法獲取的問題,將兩種方式獲取的影像數據融合建模,可以提升數據成果結構的完整性。2) 航攝影像數據與激光點云數據融合建模。建構筑物變形主要是因為點云數量太少,無法準確構建其結構。在采用激光方式獲取建構筑物點云數據時,要同步獲取每個點對應的紋理數據,構建得到完整的建構筑物結構,并將真實的紋理數據進行映射。3) 基于虛擬立體像對,采集每個建筑物的頂點三維坐標,并將對應的三維坐標連線,構建得到最終的建構筑物輪廓。通過恢復的立體像對,將最佳位置的影像數據映射到建構筑物上。對于紋理錯位的情況,聯動Photoshop軟件進行紋理的修飾與重新映射。
4.2 實際生產模型優化對比
4.2.1 瓦片接邊色差優化
本次生產的實景三維模型中,部分瓦片接邊色差大,影響了模型成果的質量。為了高效率完成瓦片接邊色差的優化,本次采用了下視航攝影像生產數字正射影像,并對瓦片接邊區域進行了紋理映射。映射前后的瓦片接邊色差對比如圖3所示。
通過對比可知,采用正射影像進行映射得到的模型解決了瓦片接邊色差的問題,接邊區域的過渡更加自然,成果質量也得到了提高。
4.2.2 懸浮物刪除
本次生產的實景三維模型中,部分路燈和樹木出現了懸浮物。筆者利用智覺空間的修模軟件直接對懸浮物進行了刪除,刪除前后的懸浮物對比如圖4所示。
通過對比可知,刪除懸浮物后的模型場景表征質量更好,整體場景顯得更加清晰。
4.2.3 建構筑物變形拉花處理
對于建構筑物底部結構變形,紋理映射錯位的模型,本次采用SVSGeoModeler軟件恢復傾斜空三。基于立體像對采集建構筑物輪廓,并完成紋理的映射。隨后,聯動使用Photoshop軟件,對貼圖錯位的區域進行重新貼圖,并將結果重新映射到模型上。如圖5所示,是對某棟建筑優化前后的白模對比圖,圖6是映射紋理后的效果對比圖。
利用外業采集的檢查點,對自動化三維模型和單體化三維模型精度檢測。由檢測結果可知,單體化三維模型精度更高。
5 結束語
文章介紹了傾斜攝影技術,并提出了幾種解決城區影像空三加密易失敗的方案。簡述了實景三維模型的生產流程,對模型存在問題的原因進行了分析,并給出了解決方案。以實際作業數據為例,我們從模型表征質量、模型結構和模型精度幾個方面進行了比對分析。結果表明:采用本文方案生產的模型更符合城市精細化三維模型制作的要求。文章的研究可為城市精細化三維模型制作提供參考。
參考文獻:
[1]王棋,姜楠. 不同飛行模式下傾斜攝影三維建模效果對比分析[J]. 測繪標準化,2023,39(3):104-108.
[2] 楊曉英,馬旭燕,辛兵廠,等. 基于多視角影像的實景三維單體化建模探究[J]. 河南城建學院學報,2023,32(3):85-91.
[4] 魏軍,于洪雨,靳巧珠,等. 無人機傾斜攝影技術在農村房地一體確權登記項目中的應用研究[J]. 測繪與空間地理信息,2023,46(2):60-63.
[4] 張懂慶,魏軍,王萍. 三種傾斜攝影建模軟件對比分析[J]. 測繪技術裝備,2022,24(3):114-119.
[5]王萍,魏軍,茍彥梅. 基于Smart3D和SVS軟件的實景三維模型生產[J]. 測繪標準化,2022,38(4):15-19.
[6] 魏軍. 傾斜攝影數據處理成果的質量檢查與評定[J]. 測繪,2021,44(3):124-127.
[7] 張萌萌,喬俊平,張顯志,等. 基于城市級的大場景實景三維模型優化技術研究[J]. 測繪技術裝備,2023,25(2):95-99.
【通聯編輯:梁書】
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
