基于LSTM的車輛移動軌跡預測研究
2024-07-01 13:39:42門瑞郭俊俊
專用汽車 2024年6期
門瑞 郭俊俊

摘要:精確的車輛軌跡預測對于提高行車安全、優化交通通行效率、改善城市交通環境具有非常重要的現實意義,是實現智能交通系統和自動駕駛技術面臨的關鍵瓶頸問題。然而現有的車輛移動軌跡預測技術面臨預測精度不高、預測過程耗時過長等問題。在深入分析國內外現有研究成果的基礎上,構建了基于LSTM的輕量級車輛移動軌跡預測模型。該模型能夠通過車輛的歷史軌跡數據捕獲影響車輛移動的關鍵因素,從而以較低的算力資源消耗代價預測車輛未來的移動軌跡,實驗采用真實的車輛軌跡數據,驗證了模型的有效性。
關鍵詞:LSTM;移動軌跡;預測
中圖分類號:U461? 收稿日期:2024-04-18
DOI:1019999/jcnki1004-0226202406019
1 前言
智能交通系統和自動駕駛技術的發展為車輛軌跡預測問題的重要性提供了前所未有的機遇和挑戰。在智能交通系統中,準確的車輛軌跡預測是實現交通流優化、智能信號控制和事故預防的關鍵。對于自動駕駛技術而言,車輛軌跡預測直接影響著車輛行為規劃、環境感知和決策制定,對實現安全、高效的自動駕駛至關重要。因此,研究和解決車輛軌跡預測問題不僅對智能交通和自動駕駛技術的發展具有重要意義,也是提高交通系統安全性和效率的關鍵一步。
國內外學者對此進行了大量研究[1-3],提出了諸多車輛軌跡預測方法,然而,這些車輛軌跡預測方法均存在模型復雜、訓練時間過長、無法快速產生預測結果等問題。近年來,使用深度學習模型成為一種新興的趨勢,這些模型更加靈活,能夠有效地處理非線性關系,從而更好地描述具有不確定性的車輛軌跡。深度學習模型中的一些技術,如循環神經網絡(RNN)和長短期記憶網絡(LSTM),已在語言模型、語音識別等序列化數據的領域被廣泛應用。
研究表明,RNN 網絡可以充分利用歷史軌跡數據。一些研究人員對統計模型和深度學習模型進行了比較研究,發現統計模型更適用于線性數據,但其空間復雜度較高;相比之下,深度學習模型在處理非線性數據時具有優勢。LSTM是RNN的一種改進型模型,它繼承了大部分RNN模型的特性,同時解決了梯度消失和梯度爆炸等問題。由于LSTM具有長時記憶功能,因此非常適合用于軌跡預測。
Yang等[4]人提出了基于注意力的雙向長短時記憶網絡(AT-BLSTM)模型,該模型由雙向長短時記憶(BLSTM)層和注意力層組成。BLSTM層包含前向和后向的長短時記憶,采用一種新的前向和后向輸出相結合的方法。注意力層利用新的自注意算法,根據特征之間的相關性分配不同的權值。孫寧[5]等人提出的結合注意力機制與時空特征融合的長時程行為識別方法。施冬梅等[6]提出了一種基于改進的長短時記憶網絡的駕駛行為檢測方法,在卷積神經網絡和長短時記憶神經網絡的基礎上,結合注意力機制改進網絡結構,提出一種混合雙流卷積神經網絡算法,空間流通道采用卷積神經網絡提取視頻圖像的空間特征值,以空間金字塔池化代替均值池化,統一了特征圖的尺度變換,時間流通道采用SSD算法計算視頻序列相鄰兩幀光流圖像,用于人眼等臉部小目標的檢測,再進行圖像特征融合與分類。
2 研究思路
通常情況下,車輛軌跡預測依賴于對歷史軌跡數據進行規則和行為挖掘的過程,旨在構建運動目標模型,以實現未來位置的準確預測。目前,車輛預測模型主要分為三類:概率圖模型、基于規劃的預測模型和深度學習模型。這些模型的問題解決知識和信息主要來自于兩個方面:a.人類對駕駛行為、地圖信息、交通規則和車輛動力學等方面的先驗知識;b.從真實交通場景中收集到的運動數據。總體而言,概率圖模型和基于規劃的預測模型更加依賴先驗知識,而深度學習模型更加注重于數據的利用。
LSTM與RNN具有相同的循環方式,其結構中每個重復的模塊擁有一個不同的結構,適合被用于處理預測時間序列中間隔和延遲非常大的重要事件。LSTM通過精心設計的門讓信息選擇式通過,以保留時間序列中的重要信息。
LSTM中的第一步是決定從細胞狀態中丟棄什么信息。這個決定通過一個稱為忘記門的結構來完成。該門會讀取[ht-1]和[xt],輸出一個在0~1之間的數值給每個在細胞狀態[Ct-1]中的數字。為1時,完全保留細胞的所有狀態信息;為0時,完全舍棄細胞的所有狀態。輸出值[ft]的計算過程為:
[ft=σ(Wfht-1,xt+bf)]?? ??????????????????(1)
第二步是確定什么樣的新信息被存放在細胞狀態中。一個新的狀態候選值由公式[Ct=tanh(WCht=1,xt+bC))]創建。把舊狀態與[ft]相乘,丟棄掉確定需要丟棄的信息。接著加上[itCt],得出新的候選值,根據更新每個狀態的程度進行變化。計算過程是:
[Ct=ftCt-1+itCt]?????????????????????????? (2)
第三是輸出門,決定了當前時刻的細胞狀態如何影響當前時刻的隱藏狀態。輸出門通過一個sigmoid函數來決定細胞狀態中的哪些部分應該被輸出。輸出門的計算方式為:
[ot=σ(Woht-1,xt+bo)]????????????????????? (3)
輸出門通過控制輸出的大小和內容,有選擇地將細胞狀態中的信息傳遞到下一個時間步的隱藏狀態中。
3 車輛軌跡源數據
采用深度學習模型預測需要大量的數據用來訓練模型,數據的質量直接影響著模型預測的準確性。本文選取了舊金山海灣地區536輛出租車近30天的行駛軌跡數據(2008年5月1日-6月10日),車輛行駛數據的采樣時間間隔是1 min。車輛軌跡數據包含的字段有:[latitude,longitude,occupancy,time],例如:[3775134,
-12239488,0,1213084687],其中,latitude和longitude是用十進制數表示的緯度和經度,occupancy代表本出租車目前是否載客(1表示載客,0表示空車),time字段是用UNIX時間戳格式表示的采樣時刻。由于本文獲取的源數據質量較高,去除了錯誤數據和噪聲數據,格式整齊,可以直接在程序中使用。
4 基于LSTM的車輛軌跡預測模型
41 實驗環境
本文所用實驗環境為操作系統Windows 10;處理器Intel(R)Core(TM)i5-10400F CPU@290GHz;內存8GB;運行環境:集成了Python365的Anaconda3;編譯環境為 PyCharm;用到的庫有TensorFlow220、pandas、numpy、matplotlib、datatime、sklearn等。
42 數據準備
在構建模型前,需要對數據進行整理,以滿足訓練模型需要的數據格式。首先讀取文件中的軌跡數據;然后為數據添加列名,刪除對構建模型無用的occupancy列;最后,將UNIX時間戳格式表示的采樣時刻轉換為時間格式,以時間列作為索引,刪除原時間列后,對軌跡數據進行排序。
一般而言,在模型訓練中,數據值大意味著更重要,由于經緯度數據差異較大,直接用于訓練模型時,會對模型的準確性產生過大的影響,因此,在構建模型前,還需對數據進行歸一化處理。在本文中,對latitude和longitude列做MinMaxScaler形式的歸一化,即將緯度和經度都歸一化為0~1之間的數。
43 模型的構建
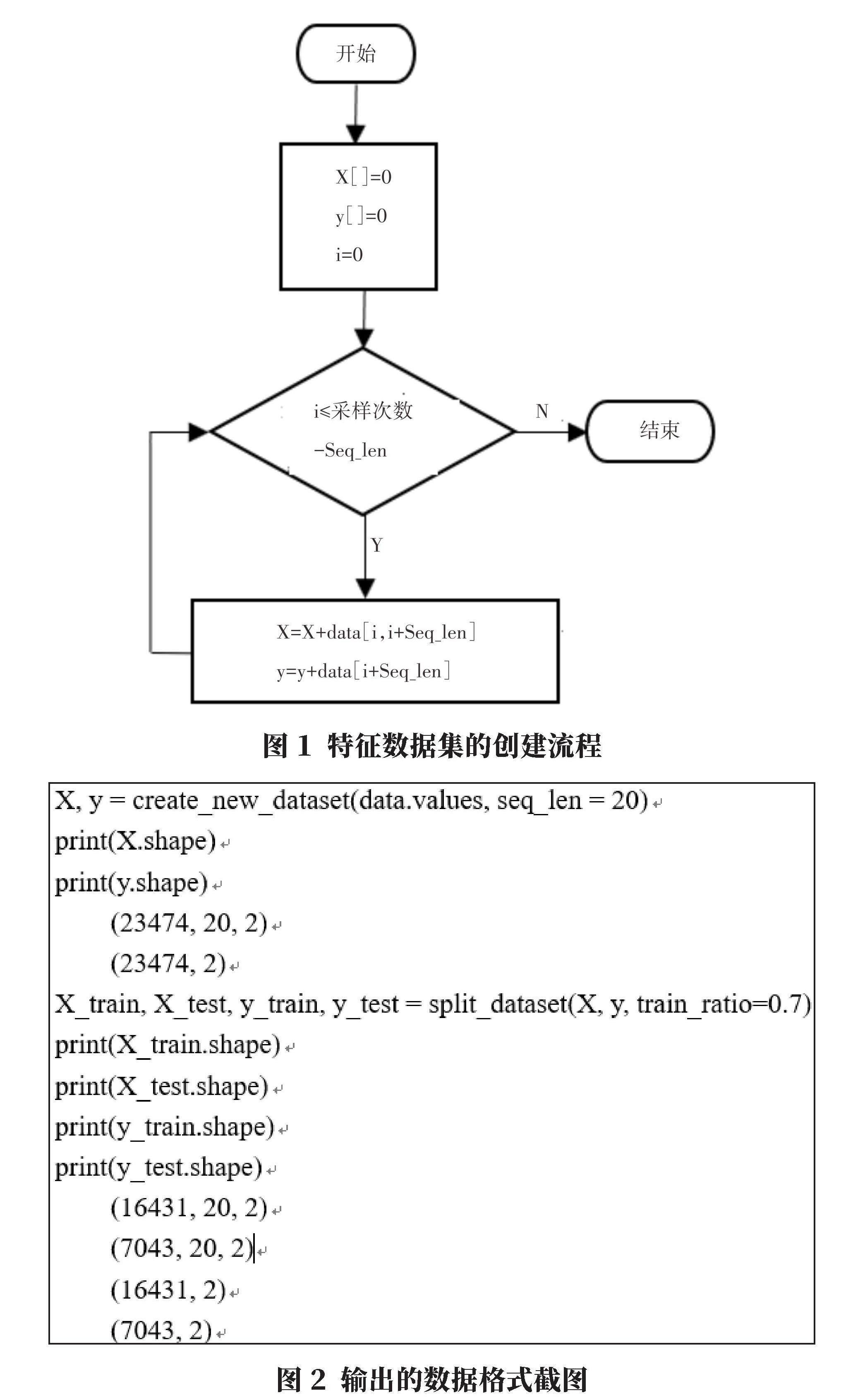
基于原始的軌跡數據創建新的特征數據集和標簽數據集,Seq_len代表創建特征數據集時的序列長度,序列的長度需選擇適中值,本文設定Seq_len的默認值為12,實際訓練過程中可以隨時調整。創建過程由一個循環結構完成,其流程如圖1所示,其中,X表示特征數據集;y表示標簽數據集;data是原始數據集。構建完成之后,需對特征數據集和標簽數據集進行切分,切分成訓練集和測試集。在本文中,訓練集占數據集總量的70%,測試集占總數據集的30%。為了提高模型的訓練速度,需對訓練集和測試集創建批數據,這樣在模型的訓練過程中,就可以批量導入數據,節省時間。
在對原始軌跡數據創建特征數據集,以及對特征數據集切分后的輸出數據格式,如圖2所示。
在完成以上這些準備工作后,即可開始構建和訓練軌跡預測的模型。
44 模型的編譯和訓練
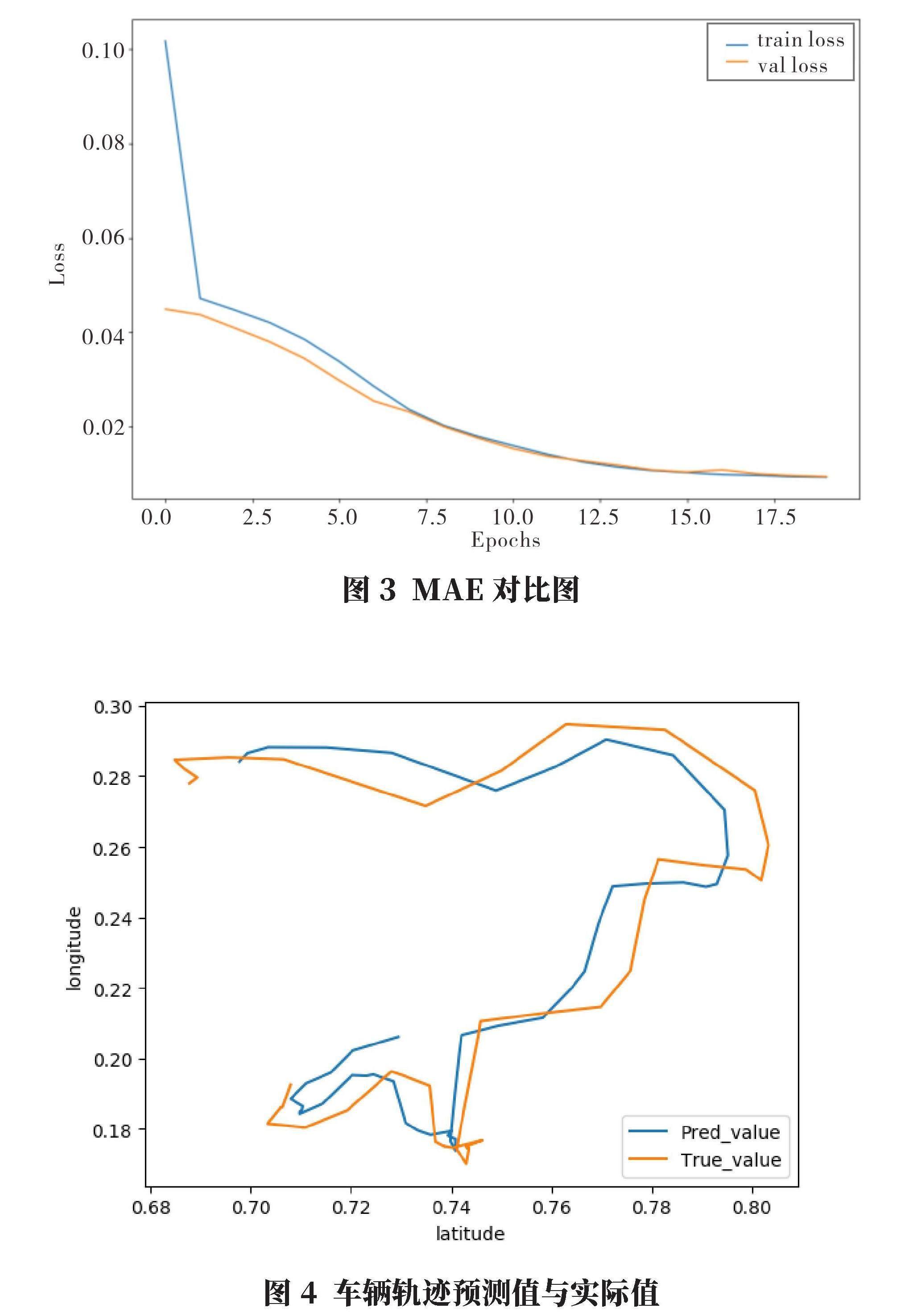
設置LSTM模型的優化器為adam,損失值的計算采用的是平均絕對誤差MAE。從訓練過程可以看出,隨著訓練輪數的增加,訓練集的損失值和測試集的損失值都呈下降趨勢。
5 實驗結果
評估模型準確性的重要指標是MAE,它體現了模型的預測值和真實值之間的差異,差異越小,模型的性能越好。圖3是在設定訓練輪數為20輪時訓練集的損失值和測試集的損失值。可以看出,兩者的損失值都呈下降趨勢,且最終在002左右保持穩定,說明了本模型能夠對車輛的軌跡進行較準確的預測。
圖4顯示了車輛軌跡的預測值和實際值的對比,橫坐標是歸一化后的緯度,縱坐標是歸一化后的經度。圖4中橙色的軌跡是車輛的真實軌跡,藍色的軌跡是車輛的預測軌跡。可以看出,估計的吻合度相對較高,但預測軌跡存在一定的延遲,這與訓練過程中模型逐步完善的過程相似。
參考文獻:
[1]趙懂宇,王志建,宋程龍基于Informer算法的網聯車輛運動軌跡預測模型[J]計算機應用研究,2020(5):1-6
[2]陳曉偉,李煊鵬,張為公基于動態圖注意力的車輛軌跡預測研究[J]汽車技術,2024(3):24-30
[3]劉創,梁軍基于注意力機制的車輛運動軌跡預測[J]浙江大學學報(工學版),2020,54(6):1156-1163
[4]Yang F, Zhang H, Tao S Travel order quantity prediction via attention-based bidirectional LSTM networks[J] The Journal of Supercomputing,2021,25:1-23
[5]孫寧,郝一嘉,宦睿智,等結合注意力機制與時空特征融合的長時程行為識別方法[J]合肥工業大學學報(自然科學版),2021,44(8):1051-1058
[6]施冬梅,肖鋒基于改進長短時記憶網絡的駕駛行為檢測方法研究[J]汽車工程,2021,43(8):1203-1209
作者簡介:
門瑞,女,1987年生,講師,博士在讀,研究方向為車聯網、計算卸載、機器學習。
基金項目:甘肅省自然科學基金項目“基于智慧交通的邊緣計算卸載策略及算力資源分配機制研究”(23JRRM744);甘肅省高等學校創新基金項目“基于物聯網的設施蔬菜智能監控與決策系統研究”(2023A-142)