一種提升乘用車側傾平衡的方法
2024-07-03 15:42:45鐘金志易高韋偉趙譜林韋道溫
汽車與駕駛維修(維修版) 2024年6期
鐘金志 易高 韋偉 趙譜林 韋道溫
關鍵詞:側傾平衡;載荷轉移;側傾主慣性軸;車輛動力學;底盤調校
中圖分類號: U462 文獻標識碼:A
0 引言
在底盤調校工作中,車輛在高速過彎時后軸甩尾、車身向前或者向后產生較大的俯仰是非常差的體驗,同時伴隨著危險。這是我們判斷車輛側傾運動是否協調的關鍵考察項目。本文引入側傾平衡的概念,表征車輛側傾運動的協調性。轉彎時,前后軸運動協調的車輛主觀感受運動輕盈,具有前后軸頂升量一致、輪胎觸感柔順、響應敏捷等特點。側傾平衡的好壞很大程度決定了底盤品質。因此,如何提升車輛側傾平衡自然成為底盤開發、調校的工作重點。為了解決側傾平衡,調校時我們重點關注前后軸俯仰及橫擺平衡表現。
基于我們熟悉理論體系,考慮車身自由度的四輪車輛模型、側傾載荷轉移,還不能詳細對側傾載荷轉移做出詳細的目標設定。關鍵影響因素如側傾中心高度、側傾剛度如何詳細匹配一直困擾著我們,主要依賴于經驗及對標。而開發車尺寸、載荷布置上往往與對標車存在較大差異,如整車的質心高度、慣量等,依賴經驗及對標可能會導致底盤硬點設計不合理從而使某些性能無法提升,影響底盤性能及整車開發進度[1-2]。
懸架動力學主要就是研究懸架的K&C 特性[3]。K代表可幾何運動學特性(Kinematic),描述由懸架運動或轉向運動引起車輪定位參數變化的規律。C 代表彈性運動學特性(Compliance),描述輪胎受到來自地面的縱向力(含制動力和驅動力)、側向力以及回正力矩而引起的車輪定位參數變化的規律。本文通過剖析整車參數,引入車輛側傾主慣性軸的概念,同時結合傳統的側傾優化方法,獲得了一種解決側傾平衡問題的方法理論,可用于指導部分K&C 特性關鍵指標(下文中簡稱KC 指標)發前期開發設計。
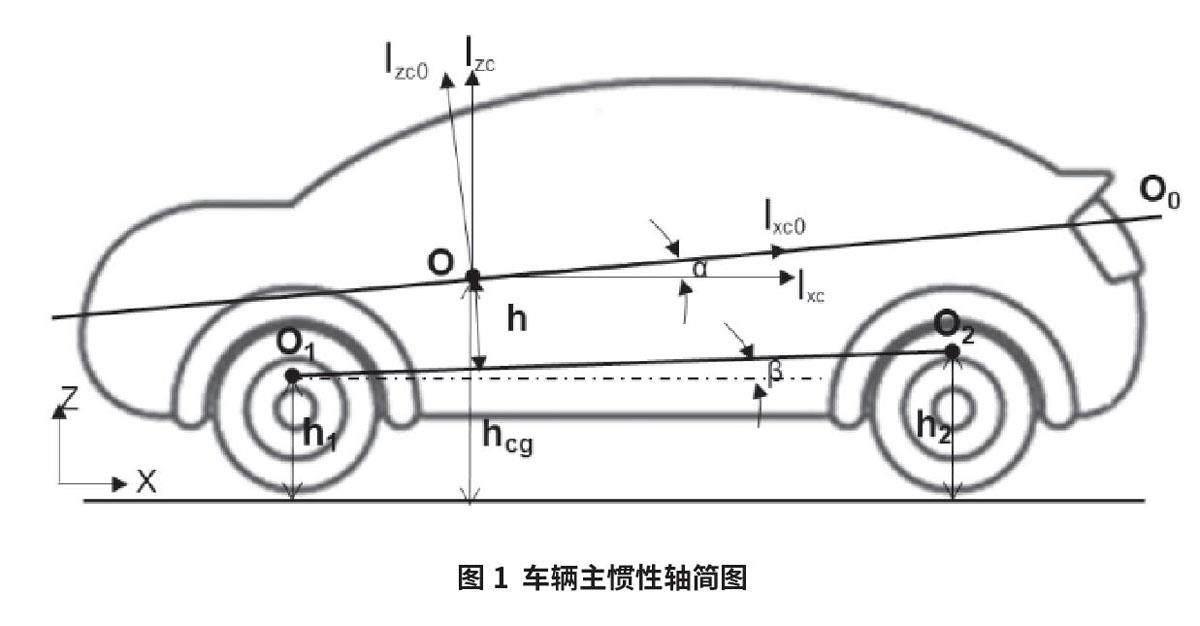
1 車輛側傾主慣性軸
車輛的質心、慣量及慣性積參數等車輛物理屬性,影響著車輛側傾、制動和垂向沖擊等方面的性能表現。車輛的慣性及慣性積決定了側傾運動時存在物理的主慣性軸,一個不規則物體在發生旋轉運動時,始終具有尋找與旋轉軸平行的形心主慣性軸運動的特點。車輛側傾時,簧上質量繞著前后懸架側傾中心連成的軸線旋轉,如果車輛的主慣性軸與側傾中心軸線平行,車輛前后部必然會獲得比較平衡的側傾運動。
圖1 為汽車側傾主慣性軸(OO 0) 簡圖。汽車側傾時,簧上質量繞著前后懸架側傾中心O 1和O 2的連線O 1O2運動。由于汽車簧上質量遠大于簧下質量,因此可近似認為側傾時整車繞前后側傾中心軸線O1O2運動。當前后側傾中心連線O 1O2與主慣性軸OO 0平行時,側傾時車身獲得協調運動的物理條件。圖1 中,h 1和h2分別為前后側傾中心高度。
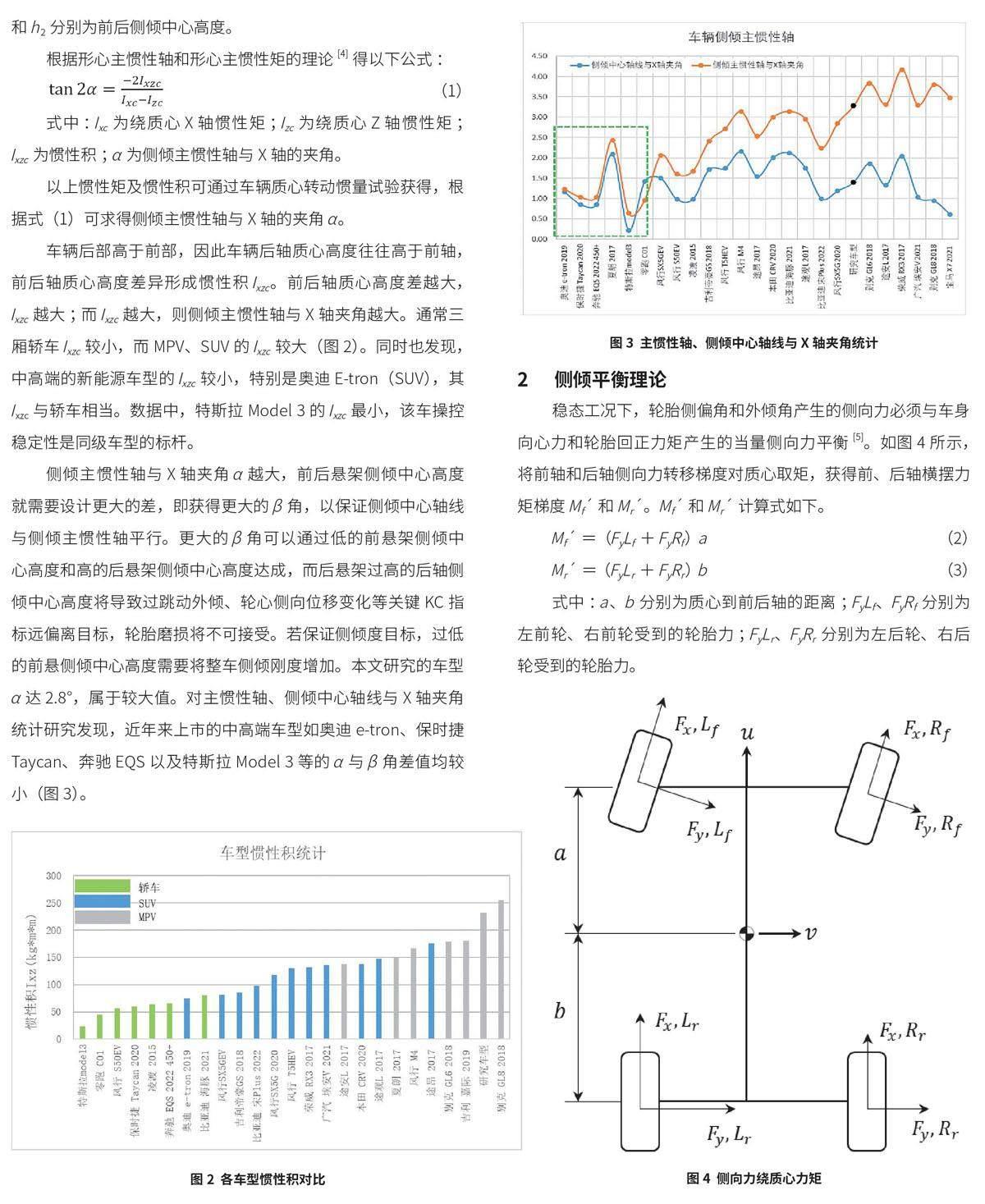
式中:Ixc為繞質心X 軸慣性矩;Izc為繞質心Z 軸慣性矩;Ixzc為慣性積;α 為側傾主慣性軸與X 軸的夾角。
以上慣性矩及慣性積可通過車輛質心轉動慣量試驗獲得,根據式(1)可求得側傾主慣性軸與X 軸的夾角α 。
車輛后部高于前部,因此車輛后軸質心高度往往高于前軸,前后軸質心高度差異形成慣性積Ixzc。前后軸質心高度差越大,Ixzc越大;而Ixzc越大,則側傾主慣性軸與X 軸夾角越大。通常三廂轎車Ixzc較小,而MPV、SUV 的Ixzc 較大(圖2)。同時也發現,中高端的新能源車型的Ixzc較小,特別是奧迪E-tron(SUV),其I xzc 與轎車相當。數據中,特斯拉Model 3 的Ixzc 最小,該車操控穩定性是同級車型的標桿。
側傾主慣性軸與X 軸夾角α 越大,前后懸架側傾中心高度就需要設計更大的差,即獲得更大的β 角,以保證側傾中心軸線與側傾主慣性軸平行。更大的β 角可以通過低的前懸架側傾中心高度和高的后懸架側傾中心高度達成,而后懸架過高的后軸側傾中心高度將導致過跳動外傾、輪心側向位移變化等關鍵KC 指標遠偏離目標,輪胎磨損將不可接受。若保證側傾度目標,過低的前懸側傾中心高度需要將整車側傾剛度增加。本文研究的車型α 達2.8°,屬于較大值。對主慣性軸、側傾中心軸線與X 軸夾角統計研究發現,近年來上市的中高端車型如奧迪e-tron、保時捷Taycan、奔馳EQS 以及特斯拉Model 3 等的α 與β 角差值均較小(圖3)。
3 側傾平衡性能驗證
3.1 仿真方案設計
本文針對研究車型設計了3 種對比方案:方案1 為初始狀態,方案2 為調整后懸架側傾中心高度,使β =α ,同時保證前后軸側傾剛度一致;方案3 為調整前后懸架側傾剛度。分別建立以上3個方案車輛動力學模型,設定同樣的質心、質心慣性矩及慣性積參數。先對各方案進行K&C 性能分析,驗證方案設定是否符合期望。再對各方案進行整車穩態回轉工況仿真,分析對比各工況前后輪胎側向力建立、俯仰梯度變化以及前后軸頂升量等參數,總結影響側傾時橫擺平衡、俯仰平衡的關鍵因素,驗證側傾平衡問題解決方法的可操作性。
3.2 動力學建模
基于項目設計及試驗數據建立整車動力學模型[6],按試驗質心慣性矩及慣性積進行整車模型平衡設定。采用Adams SPMM仿真試驗臺開展K&C 性能分析,以保證參數調整后對前后懸架的關聯影響得到體現。當切換成道路試驗臺后可開展整車工況分析。研究車型前后懸架均為獨立懸架(前麥弗遜+ 后E 型四連桿),如圖5 所示。
3.3 K&C 結果分析
方案2 因α屬于整車的物理屬性,無法對其進行調整,為使β =α ,通過增加后懸架側傾中心高度改變β 角實現。彈簧后懸架臂硬點需做較大的調整才能使β 與α 一致。此時,后懸架KC 指標變化較大,大的輪心側向位移及跳動外傾變化。為保證懸架剛度、側傾剛度和側傾轉向不變,需要重新調整彈簧參數、前束控制桿硬點。仿真模型變更容易實現,但實車調校將無法操作。
方案3 采用降低前穩定桿直徑、增加后穩定桿直徑的策略,改變前后側向力轉移,達成前后側向力的平衡目標。通過穩定桿調整側傾剛度,其他關鍵KC 指標基本不變[7]。
各方案調整后K&C 性能變化的KC 指標匯總如表1 所示,調整方案滿足方案設定預期,展開整車仿真分析對比。
3.4 整車性能表現及結果分析
對各方案模型進行穩態回轉分析,獲取前后軸懸架頂升量、不足轉向度和輪胎側向力等信息,展開對比分析(圖6)。可以看出,初始狀態前軸頂升量較大,后軸頂升量較小,與整車過彎大側向加速度時向后扎的主觀感受對應。
方案2 側傾中心高度變化明顯改變了前后軸的舉升量,后軸側傾中心高度增加,后軸的頂升量增加,前軸頂升量輕微減小。前后軸的舉升量差值更小,因此俯仰角隨側向加速度變化最小。此方案對俯仰平衡得到明顯改善。
方案3 降低前懸架側傾剛度,增加后懸架側傾剛度,前軸頂升量減小,后軸頂升量變化不大,俯仰度變化不明顯。此方案對俯仰平衡改善不明顯。
圖7 所示為不足轉向度及側傾角隨側向加速度變化。通過側傾剛度和側傾中心的調整,不足轉向度線性度均提升,同時能達到的最大側向加速度增加。側傾中心調整方案由于提升了后軸側傾中心高度,側傾力臂降低,因此整車側傾度降低。
圖8 所示為前后軸輪胎側向力隨側向加速度變化。2 種方案均減小了前軸側向力建立,增加了后軸側向力建立,而橫擺力矩梯度前軸成減小,后軸呈現增加的趨勢,前后差異更小,前后軸橫擺更加平衡。
關鍵指標驗證結果如表2 所示。
仿真分析得到以下結論。
(1)側傾中心的調整對側傾時前后軸頂升量的優化非常明顯,而側傾剛度調整不敏感。
(2)兩種方案均可以使前后軸橫擺力矩梯度匹配更加合理,確保橫擺平衡。
(3)橫擺力矩梯度的平衡可以有效提升不足轉向度線性度,同時提升最大側向加速度。
(4)側傾中心軸線與車輛側傾主慣性軸平行,可以同時提升俯仰及橫擺平衡,側傾平衡問題得到根本解決。
4 結束語
本文基于A d ams /C a r 建模及仿真分析, 驗證了車輛主慣性軸與前后懸架側傾中心軸線的平行設計,可以顯著提升車輛側傾時整車俯仰平衡及前后軸橫擺平衡。通過前后側傾剛度的優化也可以解決橫擺平衡問題,但對俯仰平衡改善不大。
通過研究找到了提升乘用車側傾平衡性能的方法:在乘用車開發中,先確定車輛側傾主慣性軸,通過K&C 特性分析優化匹配前后側傾中心高度,保證前后側傾中心軸線與側傾主慣性軸平行,可最大程度保證俯仰平衡和橫擺平衡,再結合前后懸架側傾剛度的優化進一步提升橫擺平衡。側傾平衡性能優化方法對側傾穩定性的提升、支持底盤硬點優化有重要意義。
作者簡介:
鐘金志,本科,工程師,研究方向為車輛動力學及底盤架構。