考慮特殊區域的離散區域劃分方法
2024-11-22 00:00:00蔡暢陳建峰閆青麗劉芬
系統工程與電子技術 2024年5期


摘 要:
基于多機器人系統的區域覆蓋中的區域劃分問題,分析現有區域覆蓋任務發現,在任務區域中存在危險區域或優先級更高的特殊區域。針對特殊區域需要分配給最少的機器人的情況,設計了一種基于Morse分解的離散區域劃分方法。該方法用放射狀Morse分解來定義離散任務區域的空間結構,并提出一種改進回溯法來確定最優分割線,以避免分割特殊區域并保持多機器人工作量均衡。仿真給出了在特殊區域分布不同、機器人數量不同的場景下的區域劃分結果,并與兩種現有算法進行了比較。結果表明,所提方法能夠生成穩定的解,有效減少特殊區域的分割,合理分配多機器人的工作量。
關鍵詞:
多機器人; 區域劃分; 特殊區域; Morse分解; 回溯法
中圖分類號:
TP 242
文獻標志碼: A""" DOI:10.12305/j.issn.1001-506X.2024.05.18
Discrete area partitioning method considering special regions
CAI Chang1, CHEN Jianfeng1,*, YAN Qingli2, LIU Fen1
(1. School of Marine Science and Technology, Northwestern Polytechnical University, Xi’an 710072, China;
2. School of Computer Science and Technology, Xi’an University of Posts and Telecommunications, Xi’an 710121, China)
Abstract:
Based on the problem of area partitioning in multiple robot system area coverage, analyzing existing area coverage tasks, it is found that there are special areas or special areas with higher priority in the task area. A discrete area partitioning method based on Morse decomposition is designed for the case where special areas require the allocation of the least number of robots. The method uses radial Morse decomposition to define the spatial structure of discrete task areas and proposes an improved backtracking method to determine the optimal partitioning line, in order to avoid segmenting special areas and maintain workload balance among multiple robots. The simulation provides the results of region partitioning in scenarios with different distributions of special areas and different numbers of robots, and compares them with two existing algorithms. The results show that the proposed method can generate stable solutions, effectively reduce the partitioning of special regions, and allocate the workload of multiple robots reasonably.
Keywords:
multi-robot; area partitioning; special zone; Morse decomposition; backtracking method
0 引 言
機器人的區域覆蓋技術利用移動機器人遍歷整個作業區域[1-2],常用于搜救[3-4]、地形監測[5-6]、地板清潔[7]、表面噴涂[8]、智慧農業[9]等領域。單機器人的區域覆蓋存在效率低、續航時間有限、可靠性差等問題。隨著通信、定位及自動化等技術的迅速發展,將多機器人系統(multiple robot system, MRS)應用到區域覆蓋中可很好彌補單機器人作業的缺陷與不足[10-12]。在多機器人的區域覆蓋任務中,通常將任務分成兩部分:區域劃分和單區域覆蓋,尤其是不同機器人之間存在干擾的情況,例如不同水下機器人搭載的聲納之間的干擾。本文重點研究其中的區域劃分技術,目的是將整個區域覆蓋任務劃分成多個子區域,并分配給多機器人。
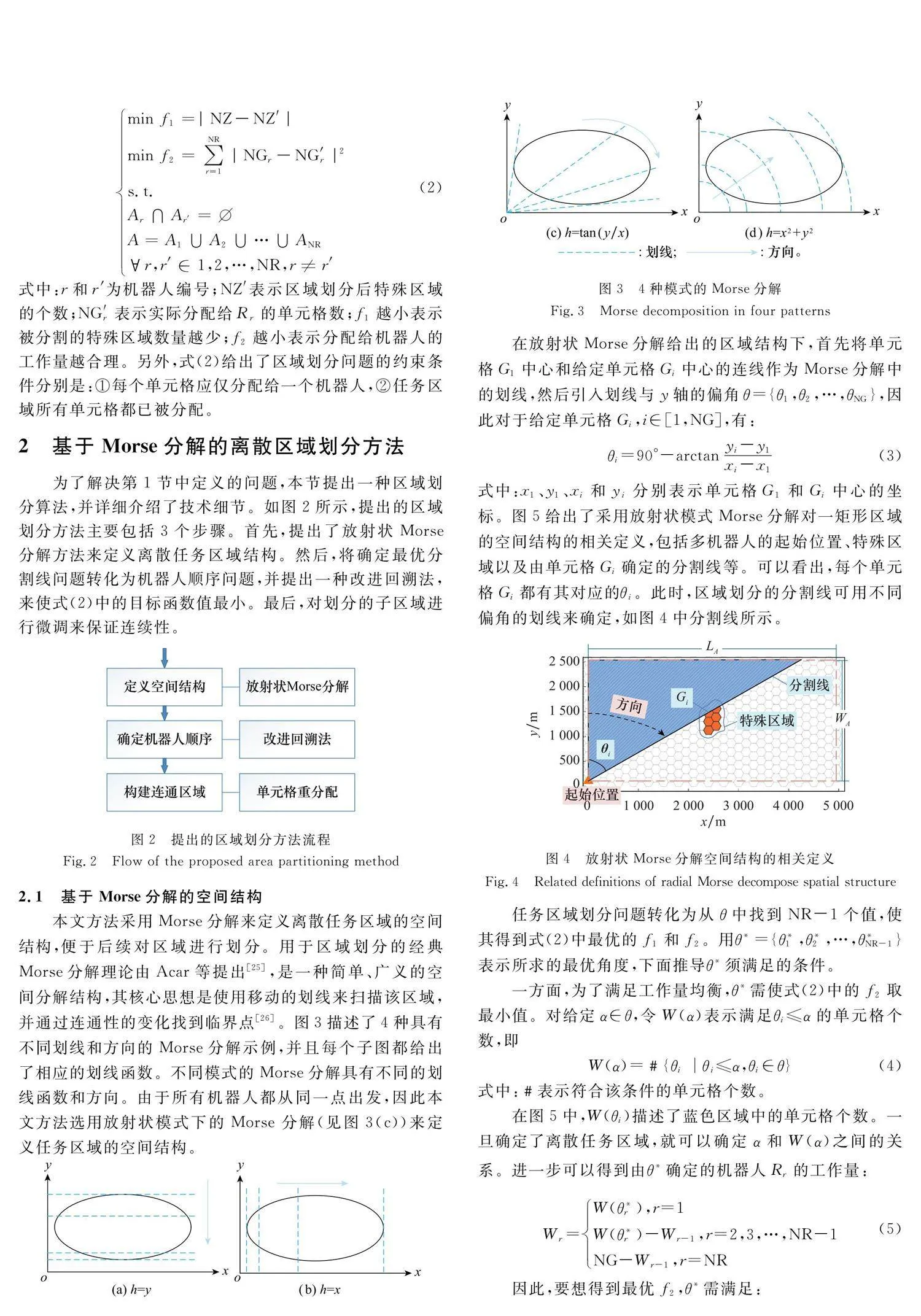
目前,區域劃分的傳統方法有Voronoi劃分法[13-14]、Delaunay三角剖分法、基于牛耕法的劃分方法[15]等。Voronoi劃分法是將空間按照歐式距離分配給最近的機器人;Delaunay三角剖分法則是對離散的空間構造Delaunay三角網,使所有子區域為凸多邊形;基于牛耕法的劃分方法主要針對空間中有障礙物的情況,可將空間根據障礙物形狀劃分成多個子區域,然后確定各子區域的訪問順序,最終覆蓋整個空間。傳統區域劃分方法是從空間幾何圖形角度提出的,此類方法雖然簡單,但是在多機器人的區域劃分問題中往往存在更多實際限制。為此,在傳統區域劃分基礎上,國內外專家學者進一步研究了基于多機器人系統及任務特點的區域劃分方法。考慮到機器人的不同探測能力和非結構化任務區域,Hassan等[13]提出一種基于Voronoi的區域劃分和分配算法。然而,這種方法引入的重疊區域增加了機器人的工作量。Kapoutsis等[16]提出一種基于機器人的初始位置劃分區域(divide areas based on Robot’s initial positions,DARP)區域劃分方法,旨在根據機器人的初始位置分配網格化任務區域。然而,以水下機器人的覆蓋任務為例,所有機器人從同一位置布放,而非提前部署在不同位置。Balampanis等[17]提出的約束Delaunay三角剖分方法側重于考慮復雜的區域形狀時和多機器人之間的工作量均衡。Coombes等[18]提出基于Morse的分解方法,利用移動劃線分割復雜區域。Morse分解提供了靈活的區域劃分框架,可根據需要選擇不同劃線,實現最優劃分。
大部分現有研究側重于解決工作量均衡、任務區域的形狀復雜等問題,并默認任務區域是一個整體,對內部位置一視同仁[19-22]。然而,在實際應用中,任務區域中經常存在一些特殊區域。除此之外,其他含有特殊區域的覆蓋任務包括重點監測區域、對抗性覆蓋任務中的危險區域[23]、地板清潔任務中的地毯區域及航空中設定的潛在危險區[24]。對于這些場景,特殊區域是整個任務區域的重要組成部分,需要在區域劃分方法中單獨處理。
在一些包含特殊區域的任務場景中,將特殊區域分配給少數機器人有助于提升覆蓋性能。以對抗覆蓋為例,將特殊區域(即危險區域)分配給較少的機器人,使得更少機器人暴露于危險中,從而確保MRS的安全[23]。另外,在使用側掃聲納的水下搜救任務中,將重點搜索區域集中到少數水下機器人中,通過優先解讀這些機器人采集的聲納圖像,有助于盡早發現目標。
基于以上背景,針對當特殊區域避免被分割時的區域劃分問題,本文提出一種基于Morse分解的離散區域劃分方法。首先,將傳統的Morse分解擴展到離散任務區域中,提出了基于放射狀Morse分解的離散任務區域的空間結構。然后基于該結構,考慮機器人的不同可用能量及避免分割特殊區域原則,提出了一種改進回溯法,獲得粗略的區域劃分結果。最后,對于生成的子區域不連續的情況,通過對連接子區域的單元格進行重新分配,構建連續子區域。為了驗證本文方法的性能,在仿真中設計了包含不同特殊區域的兩個場景,并將其劃分成子區域分配給每個機器人。從仿真結果可以看出,劃分得到的子區域可以保持工作量均衡,并避免分割特殊區域。
本文算法的優勢在于可擴展性強且計算量較低。一方面,本文算法可以擴展到多種模式下的Morse分解,如圓形模式、方形模式等,最終獲得不同區域劃分結果。另一方面,傳統回溯法存在算法復雜度較高的問題,本文通過引入對特殊空間不分割的約束條件,增加算法回溯條件,降低了計算量。
1 區域劃分問題定義
假設任務區域A為一無障礙物的凸區域,該區域已被分解為NG個大小相同的單元格,用G={G1,G2,…,GNG}表示。單元格形狀須能無縫覆蓋區域,如六邊形、四邊形等,其大小由所搭載傳感器的范圍決定,下文以六邊形分解為例進行描述。任務區域中存在NZ個特殊區域,記作Z={Z1,Z2,…,ZNZ}。本文主要針對特殊區域需要最少的機器人覆蓋的情況開展研究。
該覆蓋任務需要NR個同構機器人協作完成,機器人用Rr表示,其中r=1,2,…,NR表示每個機器人的編號。另外,每個機器人的可用能量不同,用EC={EC1,EC2,…,ECNR}表示。ECr的范圍為0到1,其中0表示電量完全耗盡,1表示滿電。顯然,機器人的可用能量應該與承擔的工作量成正比。因此,根據可用能量,預期分配給機器人Rr的單元格數NGr為
NGr=ECr∑NRr=1ECr·NG(1)
假設機器人的可用能量足以覆蓋相應數量的單元格。此外,由于不是所有機器人都可以提前放置在合適的初始位置,所以本文不討論如何確定機器人的初始位置,而是假設所有機器人都從一個起始位置出發。因此,每個機器人分到的子區域應該是連續的、靠近起始位置的,以減少到達任務區域過程中的能耗。圖1給出了本文中區域覆蓋任務的場景,包括離散任務區域、特殊區域、多個機器人及其起始位置。
2.2 改進的回溯法
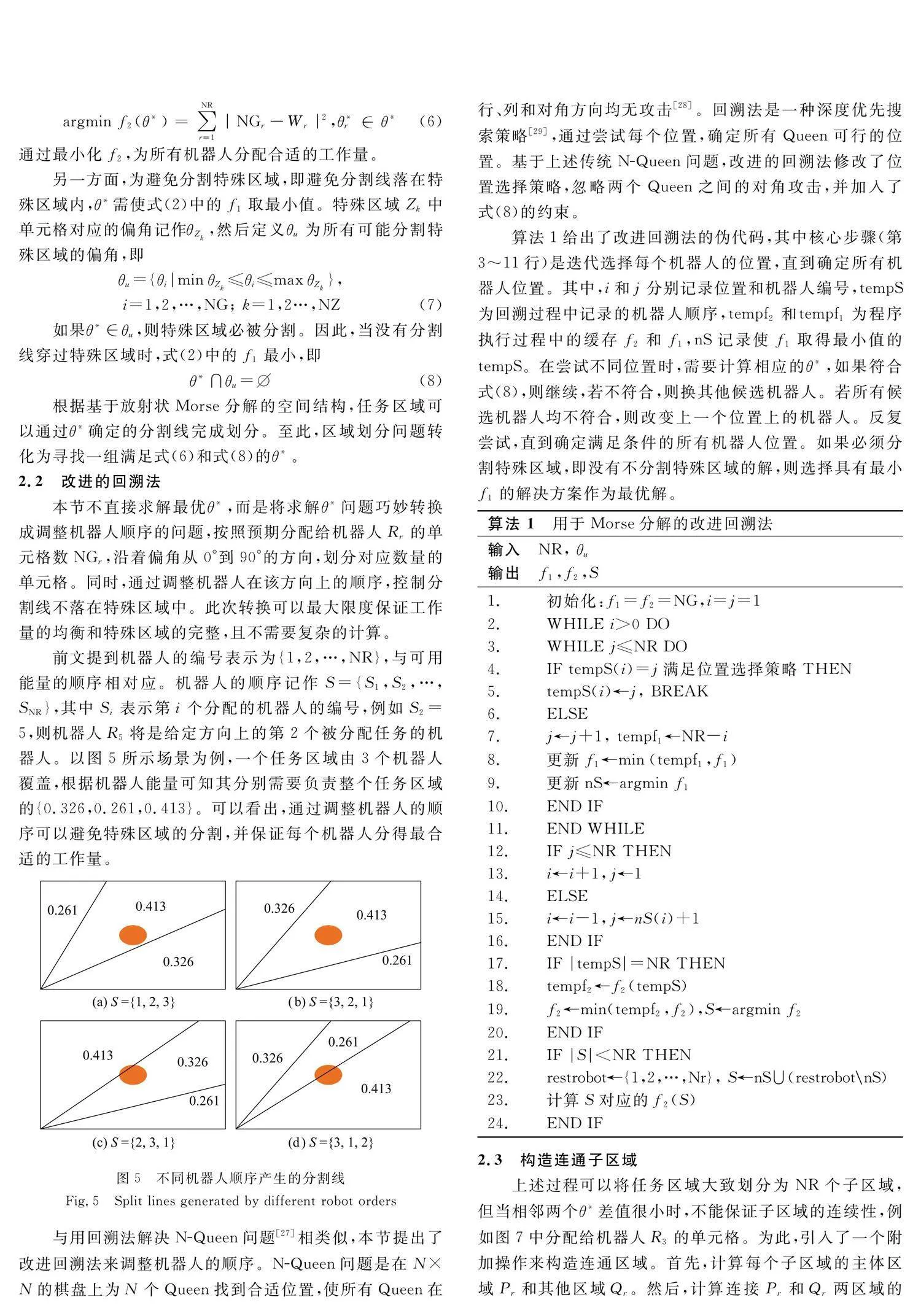
本節不直接求解最優θ*,而是將求解θ*問題巧妙轉換成調整機器人順序的問題,按照預期分配給機器人Rr的單元格數NGr,沿著偏角從0°到90°的方向,劃分對應數量的單元格。同時,通過調整機器人在該方向上的順序,控制分割線不落在特殊區域中。此次轉換可以最大限度保證工作量的均衡和特殊區域的完整,且不需要復雜的計算。
前文提到機器人的編號表示為{1,2,…,NR},與可用能量的順序相對應。機器人的順序記作S={S1,S2,…,SNR},其中Si表示第i個分配的機器人的編號,例如S2=5,則機器人R5將是給定方向上的第2個被分配任務的機器人。以圖5所示場景為例,一個任務區域由3個機器人覆蓋,根據機器人能量可知其分別需要負責整個任務區域的{0.326,0.261,0.413}。可以看出,通過調整機器人的順序可以避免特殊區域的分割,并保證每個機器人分得最合適的工作量。
與用回溯法解決N-Queen問題[27]相類似,本節提出了改進回溯法來調整機器人的順序。N-Queen問題是在N×N的棋盤上為N個Queen找到合適位置,使所有Queen在行、列和對角方向均無攻擊[28]。回溯法是一種深度優先搜索策略[29],通過嘗試每個位置,確定所有Queen可行的位置。基于上述傳統N-Queen問題,改進的回溯法修改了位置選擇策略,忽略兩個Queen之間的對角攻擊,并加入了式(8)的約束。
算法1給出了改進回溯法的偽代碼,其中核心步驟(第3~11行)是迭代選擇每個機器人的位置,直到確定所有機器人位置。其中,i和j分別記錄位置和機器人編號,tempS為回溯過程中記錄的機器人順序,tempf2和tempf1為程序執行過程中的緩存f2和f1,nS記錄使f1取得最小值的tempS。在嘗試不同位置時,需要計算相應的θ*,如果符合式(8),則繼續,若不符合,則換其他候選機器人。若所有候選機器人均不符合,則改變上一個位置上的機器人。反復嘗試,直到確定滿足條件的所有機器人位置。如果必須分割特殊區域,即沒有不分割特殊區域的解,則選擇具有最小f1的解決方案作為最優解。
2.3 構造連通子區域
上述過程可以將任務區域大致劃分為NR個子區域,但當相鄰兩個θ*差值很小時,不能保證子區域的連續性,例如圖7中分配給機器人R3的單元格。為此,引入了一個附加操作來構造連通區域。首先,計算每個子區域的主體區域Pr和其他區域Qr。然后,計算連接Pr和Qr兩區域的所有單元格,記作GConnected,并從中選擇已分配給Sr-1且對ASr-1連通性無影響的單元格,分配給Sr,直到不存在其他區域Qr。以圖6為例,GConnected單元格用藍色標記,從中選擇左側藍色單元格分配給R3。對所有子區域進行上述操作,可保證所有子區域的連續性。
2.4 復雜度分析
本文所提出的算法包含3個步驟,即用放射狀Morse分解定義空間結構、用回溯法確定機器人順序和單元格重分配,下面對每個步驟的復雜度進行分析。首先,第1個步驟為每個單元格計算對應的偏角值,因此復雜度為O(NG);其次,第2個步驟是通過回溯法求解最優的機器人順序,此步驟復雜度與機器人個數NR有直接關系,為O(NR!);最后,單元格重分配步驟中,僅作用于存在不連續區域的情況,循環次數較少,復雜度較低,可以忽略不計。綜合以上分析,本文提出算法的復雜度為O(NG+NR!)。
3 仿真試驗與分析
本章將通過兩個不同場景下的仿真,驗證提出算法的性能。仿真結果給出了不同個數機器人的區域劃分結果及與兩個現有區域劃分方法的性能比較。結果表明,提出的算法能夠均衡多機器人的工作量,避免分割特殊區域。
在仿真中,假設有NR個水下機器人共同執行水下搜救任務,覆蓋一個5 000 m×2 500 m的矩形海域。區域內分布了一個或多個搜救專家劃定的目標可能區域(即本文提到的“特殊區域”),用少數水下機器人覆蓋目標可能區域有助于快速識別到目標。現采用本文提出的算法確定每個水下機器人的作業區域。任務區域被分解成了半徑為100 m的正六邊形單元格。機器人的起始位置位于任務區域左下角。另外,任務區域中還設置了特殊區域。采用提出的區域劃分方法,整個任務區域將被劃分為NR個分區。另外,多機器人的可用能量隨機設定為EC={0.93,0.98,0.65,0.97,0.85,0.4,0.7,0.9,1,0.82}。若NRlt;10,則EC取前NR個元素。
在此背景下,設計了兩個不同場景中,并采用3~10個機器人執行區域覆蓋任務。兩個場景是在相同的任務區域中分別設定了不同的特殊區域。場景1如圖5所示,只在矩形中心位置設置了一個特殊區域(橙色單元格)。場景2則是在相同的任務區域中設置了多個分散特殊區域。
為了驗證算法的先進性,將本文提出的方法與現有的兩種區域劃分方法進行了比較,即廣義Voronoi圖(generalized Voronoi diagram,GVD)方法[14]和牛耕回溯(boustrophedon and backtracking,BoB)方法[15],因為這兩種算法可用于不計算機器人初始位置的柵格區域劃分。GVD是一種最常用的區域劃分方法,已應用于各種區域覆蓋領域。BoB方法是一種基于牛耕法覆蓋方法的區域劃分方法,與本文算法類似,亦考慮了多機器人的工作量均衡。
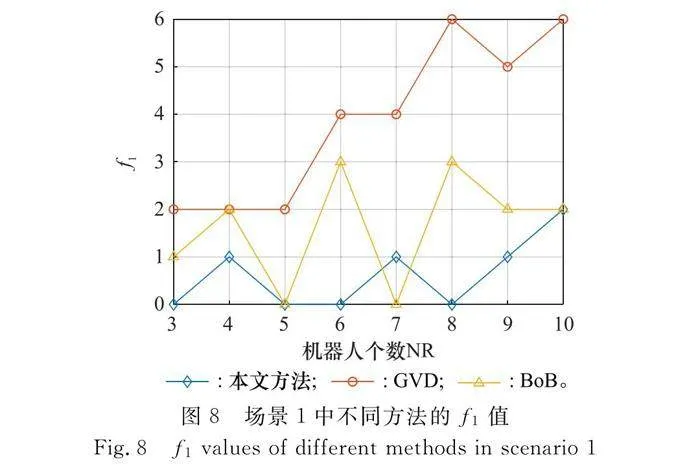
本文方法、GVD方法和BoB方法的對比包括兩個方面:保持特殊區域不被分割和工作量均衡,與目標函數f1和f2相對應。f1越小,即被分割的特殊區域越少。f2越小,即實際分配的單元格數與預期分配的單元格數之間的平方差越小,工作量越均衡。
3.1 場景1(一個特殊區域)
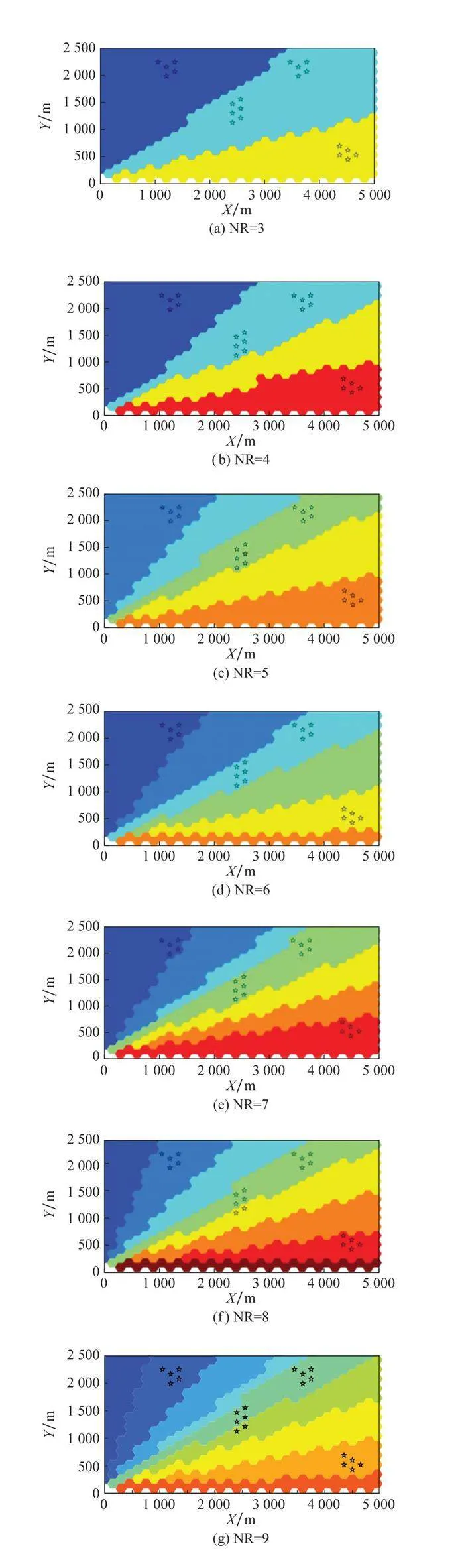
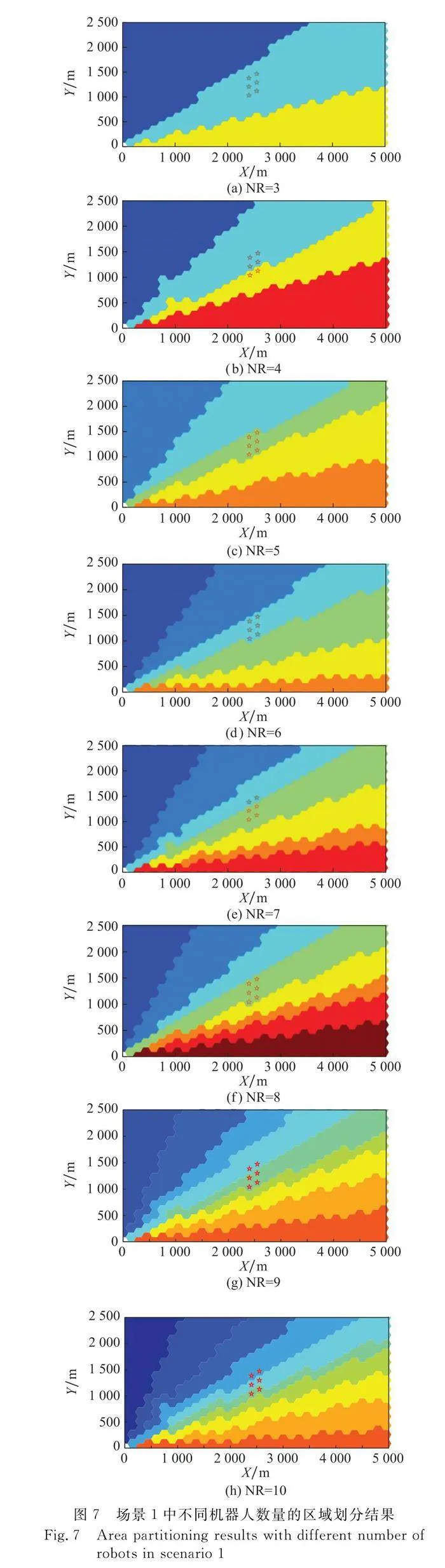
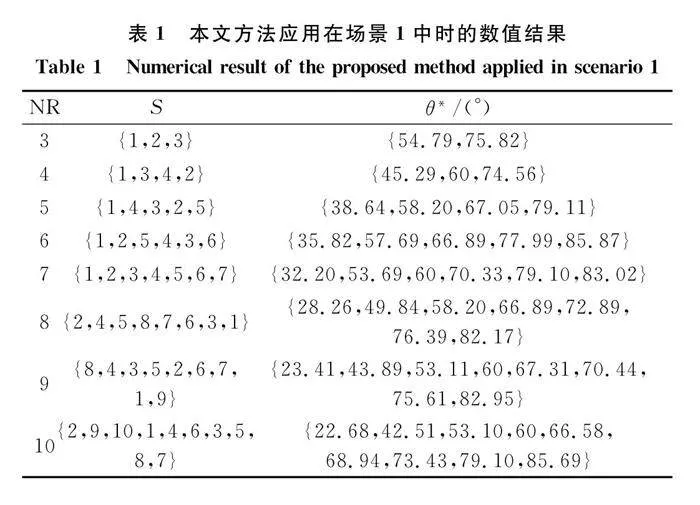
本節將對圖4所示的場景進行區域劃分,其中設有一個特殊區域。表1列出了使用本文方法進行區域劃分的數值結果,包括最終機器人順序S、分割線角度θ*,其中機器人數量為3~10個。根據表1的數值結果,圖7給出了對應的區域劃分結果,特殊區域中的單元格用紅星標記,分配給不同機器人的子區域用不同顏色填充。可以看出,NR取3,5,6,8時,特殊區域保持完整;在NR取4,7,9時,特殊區域僅被分為了兩部分,在NR取10時,特殊區域被分為了三部分。由此得出,該方法可以生成連續的子區域并保持較少的特殊區域劃分。
圖8給出了本文方法、GVD方法和BoB方法的f1值的比較結果。可以看出,本文方法(藍色線)的f1值整體穩定,最多有兩個被分割出的特殊區域,且機器人的增多不會造成更多的特殊區域被分割。而BoB方法(黃色線)存在有3個分割出的特殊區域的情況,GVD(紅色線)更會隨機器人的增多而產生更多的被分割的特殊區域。因此,本文方法可以更好地保護區域不被分割。
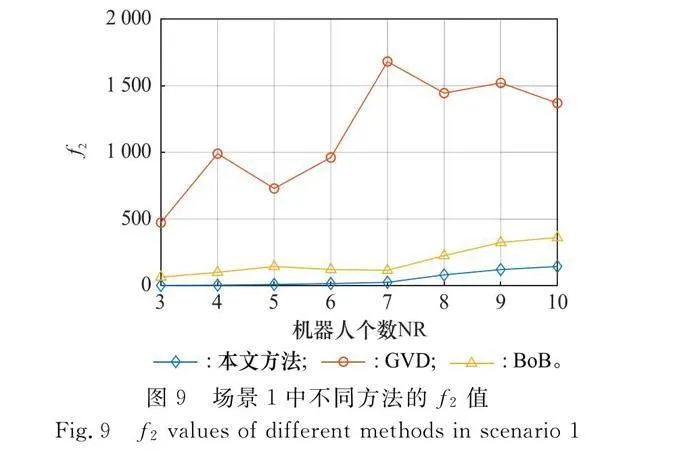
圖9給出了本文方法與GVD方法、BoB方法的f2值比較結果,用來衡量分配給每個機器人的預期單元格數和實際分得的單元格數之間的差異。本文方法的f2值保持穩定且低于另外兩種方法,只隨著機器人數量的增多有少量增長。而由于GVD方法并未考慮多機器人的工作量均衡問題,因此GVD方法會造成分配給機器人的工作量不合理。而本文方法和BoB均對多機器人可用能量不同的情況采取了措施,因此兩者結果相近,但本文方法比BoB方法具有更好的工作量均衡的能力。
綜上所述,在場景1中,機器人數量取3~10時本文方法都具有更好的保持特殊區域完整和合理分配工作量的能力。
3.2 場景2(多個特殊區域)
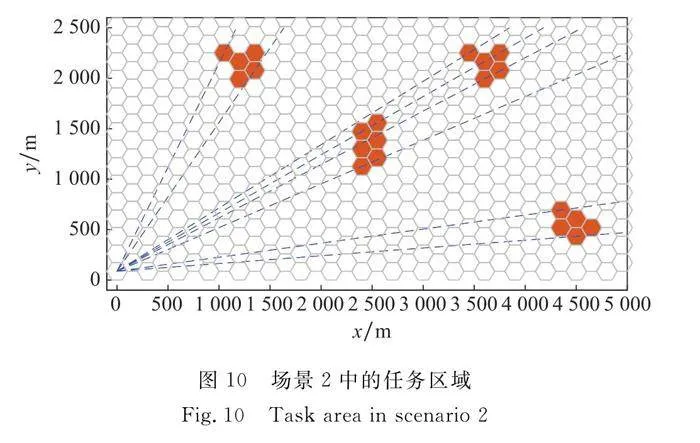
本節在一個具有多個分散特殊區域的任務場景中驗證算法的性能,并給出了該任務區域劃分給不同數量機器人的結果,以及本文方法與GVD方法、BoB方法的性能比較結果。該任務場景如圖10所示,包含了4個隨意設定的特殊區域,藍色虛線表示特殊區域的邊界。
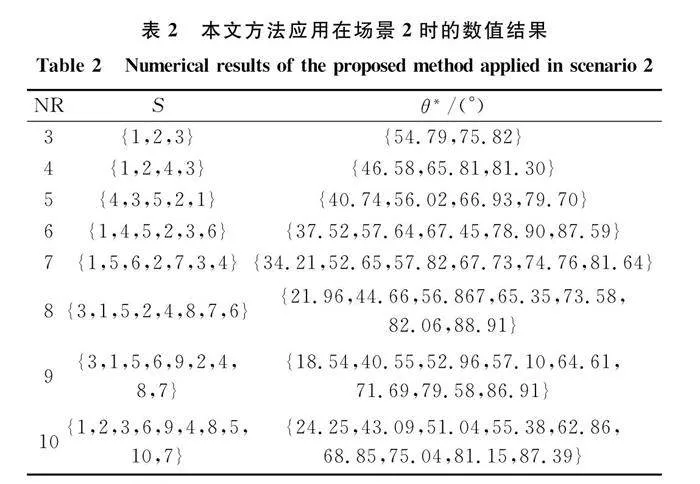
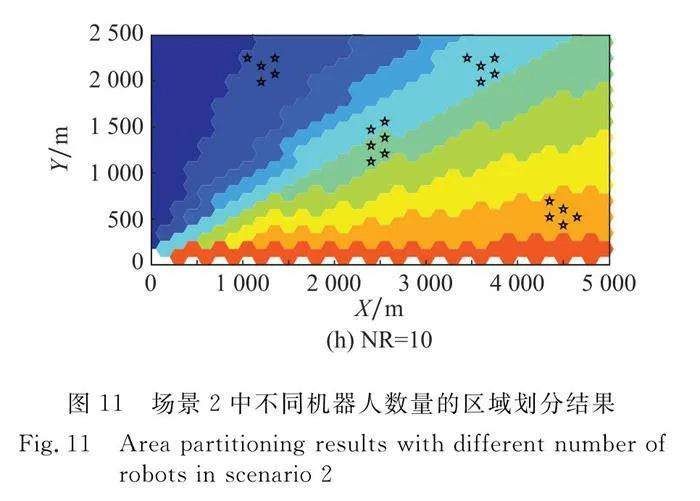
表2總結了在場景2中應用本文方法的所有數值結果,相應的區域劃分結果如圖11所示,其中特殊區域中的單元格用黑色五角星標記,分配給不同機器人的單元格用不同顏色表示。從圖11中可以看出,分配給不同機器人的子區域是連續的,并且離起始位置的單元格較近。當NR取3~7時,所有特殊區域沒有被分割,NR取8~10時,只有一個特殊區域被分割成了兩部分。
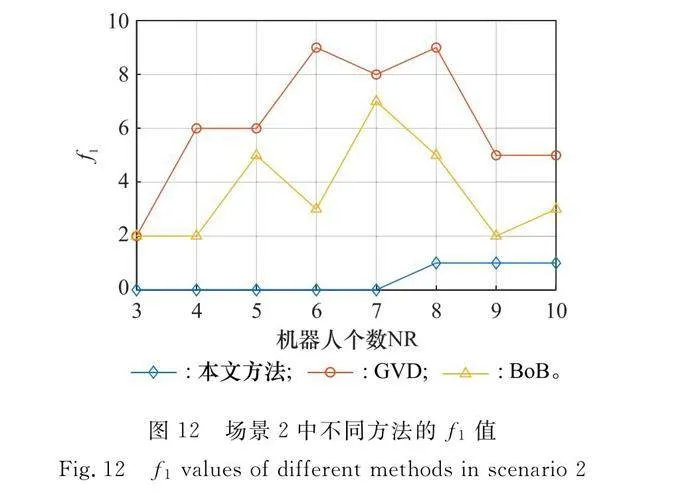
圖12給出了本文方法、GVD方法和BoB方法不分割特殊區域能力比較,即f1的對比結果。可以看出,本文方法相對穩定,大部分情況沒有特殊區域被分割。而BoB方法和GVD方法則性能較差,被分割的特殊區域會隨機器人個數的增多而增加。因此,與其他方法相比,本文方法更有利于保證特殊區域不被分割。
場景2中,本文方法與GVD方法和BoB方法的f2值的比較如圖13所示。整體來看,所提出的方法的f2值最低且相對穩定,與BoB方法的結果相差不多,因為二者都考慮到了工作量均衡的問題。而GVD方法并沒有對工作量均衡采取措施,因此其f2值偏高且呈上升趨勢。因此,本文方法在場景2中也可以分配合適的工作量給多機器人。
通過分析上述結果,該方法生成的子區域具有以下特點:① 很少分割特殊區域;② 分配給每個機器人的網格數量接近預期數量;③ 劃分的子區域是連續的,接近機器人起始位置。因此,該方法在避免特殊區域被分割和保持良好的工作量均衡方面具有優勢,能滿足第2節中區域劃分問題的需求。
4 結 論
針對多機器人區域覆蓋任務中存在特殊區域的情景,設計了一種區域劃分方法,將任務區域合理分配給多機器人,并期望使用更少的機器人覆蓋特殊區域。不同場景下的仿真結果表明,該方法可以避免特殊區域的分割,保持多機器人的工作量均衡。借助Morse分解的框架,該方法可以擴展到多種模式的Morse分解種,最終形成不同的區域劃分結果。另外,提出的方法率先將特殊區域的概念引入區域劃分領域,對于采用多機器人進行對抗性覆蓋、搜救等含有特殊區域的區域覆蓋任務中具有重要意義。
參考文獻
[1] 李冠男, 董凌艷, 徐紅麗, 等. 群機器人區域覆蓋方法研究[J]. 機器人, 2017, 39(5): 670-679.
LI G N, DONG L Y, XU H L, et al. Research on region coverage approach with swarm robots[J]. Robot, 2017, 39(5): 670-679.
[2] YAO P, QIU L Y, QI J P, et al. AUV path planning for coverage search of static target in ocean environment[J]. Ocean Engineering, 2021, 241: 110050.
[3] CHO S W, PARK H J, LEE H, et al. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations[J]. Computers amp; Industrial Engineering, 2021, 161: 107612.
[4] AI B, JIA M X, XU H W, et al. Coverage path planning for maritime search and rescue using reinforcement learning[J]. Ocean Engineering, 2021, 241: 110098.
[5] WU C M, DAI C K, GONG X X, et al. Energy-efficient coverage path planning for general terrain surfaces[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2584-2591.
[6] POPOVICM, VIDAL-CALLEJA T, HITZ G, et al. An informative path planning framework for UAV-based terrain monitoring[J]. Autonomous Robots, 2020, 44(6): 889-911.
[7] KRISHNA L A, ELARA M R, RAMALINGAM B, et al. Complete coverage path planning using reinforcement learning for Tetromino based cleaning and maintenance robot[J]. Automation in Construction, 2020, 112: 103078.
[8] VAZQUEZ-CARMONA E V, VASQUEZ-GOMEZ J I, HERRERA-LOZADA J C, et al. Coverage path planning for spraying drones[J]. Computers amp; Industrial Engineering, 2022, 168: 108125.
[9] 王偉, 張彥斐, 宮金良. 基于蟻群-BFS算法的復雜環境下農業機器人全區域覆蓋研究[J]. 華南農業大學學報, 2019, 42(3): 119-125.
WANG W, ZHANG Y F, GONG J L. Study on the whole area coverage of agricultural robot in complex environment based on ant colony-BFS algorithm[J]. Journal of South China Agricultural University, 2019, 42(3): 119-125.
[10] NAIR V G, GURUPRASAD K R. MR-SimExCoverage: multi-robot simultaneous exploration and coverage[J]. Computers amp; Electrical Engineering, 2020, 85: 106680.
[11] ALMADHOUN R, TAHA T, SENEVIRATNE L, et al. A survey on multi-robot coverage path planning for model reconstruction and mapping[J]. SN Applied Sciences, 2019, 1(8): 847.
[12] 李娟, 張秉健, 楊莉娟, 等. 未知環境下基于感知自適應的多AUV目標搜索算法[J]. 系統工程與電子技術, 2018, 40(8): 1839-1845.
LI J, ZHANG B J, YANG L J, et al. Multi-AUV target search algorithm with cognitive-based adaptive optimization in unknown environment[J]. Systems Engineering and Electronics, 2018, 40(8): 1839-1845.
[13] HASSAN M, LIU D. Simultaneous area partitioning and allocation for complete coverage by multiple autonomous industrial robots[J]. Autonomous Robots, 2017, 41(8): 1609-1628.
[14] NAIR V G, GURUPRASAD K R. GM-VPC: an algorithm for multi-robot coverage of known spaces using generalized voronoi partition[J]. Robotica, 2020, 38(5): 845-860.
[15] VIET H H, DANG V, CHOI S, et al. BoB: an online coverage approach for multi-robot systems[J]. Applied Intelligence, 2015, 42(2): 157-173.
[16] KAPOUTSIS A C, CHATZICHRISTOFIS S A, KOSMATOPOULOS E B. DARP: divide areas algorithm for optimal multi-robot coverage path planning[J]. Journal of Intelligent amp; Robotic Systems, 2017, 86(3/4): 663-680.
[17] BALAMPANIS F, MAZA I, OLLERO A. Area partition for coastal regions with multiple UAS[J]. Journal of Intelligent amp; Robotic Systems, 2017, 88(2/4): 751-766.
[18] COOMBES M, FLETCHER T, CHEN W, et al. Optimal polygon decomposition for UAV survey coverage path planning in wind[J]. Sensors, 2018, 18(7): 2132.
[19] KIM J. Multi-robot global sonar survey in the presence of strong currents[J]. Ocean Engineering, 2019, 188: 106316.
[20] DONG W, LIU S S, DING Y, et al. An artificially weighted spanning tree coverage algorithm for decentralized flying robots[J]. IEEE Trans.on Automation Science and Engineering, 2020, 17(4): 1689-1698.
[21] GUASTELLA D C, CANTELLI L, GIAMMELLO G, et al. Complete coverage path planning for aerial vehicle flocks deployed in outdoor environments[J]. Computers amp; Electrical Engineering, 2019, 75: 189-201.
[22] SUN R C, TANG C H, ZHENG J Y, et al. Multi-robot path planning for complete coverage with genetic algorithms[M]. Cham: Springer International Publishing, 2019: 349-361.
[23] YEHOSHUA R, AGMON N, KAMINKA G A. Robotic adversarial coverage of known environments[J]. The International Journal of Robotics Research, 2016, 35(12): 1419-1444.
[24] 魏瀟龍, 姚登凱, 谷志鳴, 等. 基于分割法的無人機路徑規劃研究[J]. 計算機仿真, 2016, 33(1): 90-94.
WEI X L, YAO D K, GU Z M, et al. UAV path planning method based on split method[J]. Computer Simulation, 2016, 33(1): 90-94.
[25] ACAR E U, CHOSET H, RIZZI A A, et al. Morse decompositions for coverage tasks[J]. The International journal of robotics research, 2002, 21(4): 331-344.
[26] CAI C, CHEN J F, YAN Q L, et al. A multi-robot coverage path planning method for maritime search and rescue using multiple AUVs[J]. Remote Sensing, 2023, 15(1): 93.
[27] SERKAN G, VERONICA B, SALEH A. N-Queens solving algorithm by sets and backtracking[C]∥Proc.of the Southeast Conference, 2016.
[28] GLOCK S, MUNHA C D, SUDAKOV B. The N-Queens completion problem[J]. Research in the Mathematical Sciences, 2022, 9: 41.
[29] 沈夢珠. 基于回溯法的掃地機器人全區域覆蓋規劃算法研究[D]. 武漢: 華中科技大學, 2018.
SHEN M Z. Research on full coverage algorithm of sweeping robot path based on backtracking[D]. Wuhan: Huazhong University of Science amp; Technology, 2018.
作者簡介
蔡 暢(1993—),女,博士研究生,主要研究方向為AUV集群、區域覆蓋、路徑規劃。
陳建峰(1972—),男,教授,博士,主要研究方向為AUV控制、AUV結構。
閆青麗(1990—),女,講師,博士,主要研究方向為分布式布局、聲源定位。
劉 芬(1982—),女,副教授,博士,主要研究方向為人工智能。
猜你喜歡
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52