無人機低空攝影測量技術(shù)在水利工程測量中的應(yīng)用研究
2024-11-25 00:00:00張津
科技資訊 2024年20期

摘要:以某水利工程為例,探究了大疆經(jīng)緯M300無人機低空攝影測量技術(shù)在該測區(qū)的應(yīng)用。在基本控制測量與無人機低空攝影測量的基礎(chǔ)上,對內(nèi)業(yè)數(shù)據(jù)依次進行影像糾偏、空三加密、平差解算等處理,同時結(jié)合外業(yè)調(diào)查調(diào)繪資料繪制測區(qū)地形圖。從精度評估情況看,空三加密精度和地形圖精度均符合工程需要,為水利工程的建設(shè)與維護提供了參考。
關(guān)鍵詞:無人機低空攝影測量水利工程空三加密外業(yè)測繪
中圖分類號:P27
ResearchontheApplicationofUAVLowAltitudePhotogrammetryTechnologyinWaterConservancyEngineeringSurveying
ZHANGJin
CangzhouWaterResourcesSurveyandPlanningDesignInstituteCo.,Ltd.,Cangzhou,HebeiProvince,050051China
Abstract:Takingacertainwaterconservancyprojectasanexample,thispaperexplorestheapplicationofLowAltitudePhotogrammetrytechnologyusingtheDJIM300UnmannedAerialVehicle(UAV)inthesurveyarea.OnthebasisofbasiccontrolmeasurementandUAVlowaltitudephotogrammetry,imagecorrection,aerialtriangulation,adjustmentcalculationandotherprocessingarecarriedoutoninternaldatainsequence,whiledrawingtopographicmapsofthesurveyareabasedonfieldsurveyandmappingdata.Fromtheaccuracyevaluation,itcanbeseenthattheaccuracyofaerialtriangulationandtopographicmapbothmeettheengineeringneeds,providingareferencefortheconstructionandmaintenanceofwaterconservancyprojects.
KeyWords:UAVlowaltitudephotogrammetry;Waterconservancyengineering;Aerialtriangulation;Fieldsurveyandmapping
隨著民用無人機技術(shù)的成熟,無人機低空攝影測量被廣泛應(yīng)用到城市規(guī)劃、文物保護、應(yīng)急測繪、工程測量等領(lǐng)域。無人機低空攝影測量系統(tǒng)包含了飛行平臺、飛控系統(tǒng)以及數(shù)據(jù)傳輸系統(tǒng)等,可以支持在線規(guī)劃航線、遠程控制飛行、自動進行數(shù)據(jù)處理和自動成圖等功能。在應(yīng)用該技術(shù)進行水利工程測量時,除了使用無人機進行低空攝影測量獲取影像數(shù)據(jù)外,還要使用GPS(GlobalPositioningSystem,GPS)、RTK(Real-timekinematic,RTK)等設(shè)備進行外業(yè)調(diào)查調(diào)繪,將內(nèi)業(yè)與外業(yè)資料相結(jié)合制成的地形圖精度更高、內(nèi)容更加豐富,相應(yīng)的對于工程建設(shè)具有更高的參考價值。
1測區(qū)概況
某地擬建水庫高程在1007~1288m之間,有防洪、發(fā)電、灌溉等功能。測區(qū)縱向范圍為壩址軸線上游3.6km至下游2.5km,橫向范圍為壩肩至塬面以外12m。測區(qū)地表植被以低矮灌木為主,但是受地形影響通視條件不良。為更高效率獲取更加精確的測量數(shù)據(jù),在本工程中應(yīng)用了無人機低空攝影測量技術(shù),使用設(shè)備為大疆經(jīng)緯M300型無人機,最快飛行速度23m/s,最大續(xù)航時間55min,錄像分辨率1080p。
2無人機低空攝影測量技術(shù)的應(yīng)用
無人機低空攝影測量是通過提前規(guī)劃測區(qū)路線的方式,讓無人機在航高1000m以下定向飛行并完成數(shù)字攝影測量。將控制測量資料與無人機低空攝影測量資料相結(jié)合,在空中三角處理的基礎(chǔ)上建立測區(qū)的三維模型,同時結(jié)合外業(yè)補測及調(diào)繪信息編輯地形圖,以可視化形式呈現(xiàn)最終成果。
2.1控制測量
基于“先像控后航測”思路,在測區(qū)內(nèi)布置了18個GPS標(biāo)識點,聯(lián)測3個C級平面控制點和2個Ⅱ等高程點,所有操作內(nèi)容均嚴格按照《水利水電工程測量規(guī)范(SL197-2013)》進行。高程控制采用五等幾何水準(zhǔn)測量成果,使用GPS-RTK方式聯(lián)測像控點三維坐標(biāo)[1]。為消除誤差,采用3次測量結(jié)果的平均值作為像控點最終成果。
2.2航空攝影
2.2.1航攝設(shè)計與成果
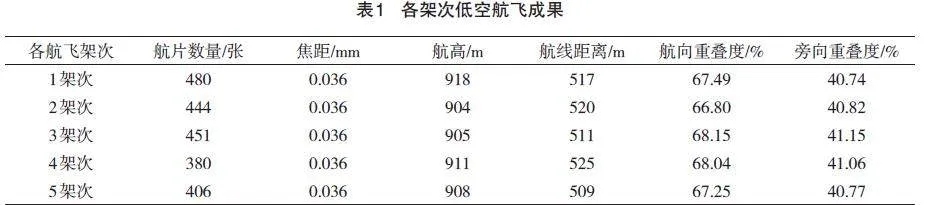
本次無人機低空攝影測量任務(wù)選用大疆經(jīng)緯M300無人機,搭載SonyA7RⅡ定焦單反相機,焦距35.1mm,像元大小4.6μm。工作人員通過無人機地面控制軟件規(guī)劃航測線路,并設(shè)定旁向重疊度、航向重疊度、飛行速度等主要參數(shù)。分5個架次共30條航帶進行航攝,累計獲得相片2161張,航飛成果如表1所示。
2.2.2像控點布置
像控點布設(shè)方法選擇“區(qū)域網(wǎng)布點法”,測區(qū)范圍內(nèi)共設(shè)置25個像控點,全部分布在無人機航向和旁向6片重疊范圍內(nèi)。在確定像控點位置時,優(yōu)先考慮地勢平坦、視野開闊的區(qū)域,原則上不得選擇煙囪、電線桿以及高大建筑物作為像控點。在像控點處用白石灰作“十”字標(biāo)記,以便于無人機拍攝。
2.3外業(yè)測繪
本次測量任務(wù)重外業(yè)調(diào)查測繪工作主要包括兩方面:一是水工建筑物的調(diào)查測量,測量對象包括測區(qū)范圍內(nèi)的淤地壩和溢流壩的壩頂高程,以及臨水坡腳高程;獲取抽水泵站的位置、管徑等參數(shù)。二是地形圖調(diào)繪,結(jié)合拼接影像在測區(qū)內(nèi)開展了實地調(diào)繪,主要目標(biāo)包括村莊名稱;房屋屬性以及道路材質(zhì)、電線敷設(shè)路徑等[2]。
2.4內(nèi)業(yè)數(shù)據(jù)處理
2.4.1影像糾偏
影像糾偏處理流程如下:運行ArcGIS軟件后,點擊菜單欄中的“加載”選項,在新彈出的對話框中添加需要糾偏配準(zhǔn)的影像數(shù)據(jù)。數(shù)據(jù)加載完畢后,進入ArcGIS軟件的工具箱并選擇“影像處理工具”,展開該部分并單擊選擇“糾偏”子工具,進入相應(yīng)的窗口。在該窗口中設(shè)置糾偏方法、糾偏參數(shù)后,即可完成對影像數(shù)據(jù)的糾偏配準(zhǔn)。將鼠標(biāo)移動至配準(zhǔn)后的影像圖片上,單擊右鍵選擇“導(dǎo)出數(shù)據(jù)”,然后選擇另存路徑,保存配準(zhǔn)后的影像數(shù)據(jù)。
2.4.2空三加密
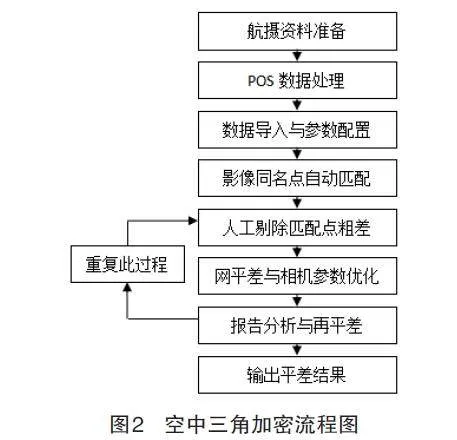
本文使用VirtuoZo數(shù)字攝影測量工作站提供的Inpho軟件完成空中三角加密,作業(yè)步驟如圖2所示。
在空三加密中,通過計算機自動匹配的方式測量加密點,要求加密點盡可能的均勻分布在像片中,航帶連接點的每張像片中加密點數(shù)量不得少于3個。在確定加密點具體位置時,采用4×4標(biāo)準(zhǔn)位置選點方法,要求每個區(qū)域內(nèi)的標(biāo)準(zhǔn)點數(shù)量不得少于4個,達到降低模型連接差和航帶連接差的目的。平差解算也是空三加密中的重要步驟,可通過Inpho軟件自帶的平差解算工具完成該項工作,經(jīng)過剔除粗差、迭代計算、人工編輯后,保證輸出的平差結(jié)果有更高的精度[4]。
2.4.3數(shù)據(jù)生產(chǎn)
使用測繪軟件生成數(shù)字高程模型(DigitalElevationModel,DEM)和數(shù)字正射影像(DigitalOrthophotoMap,DOM)。通過手腳輪盤等工具配合JX4等線畫圖采集軟件,繪制出線畫圖采集成果。將處理完畢的數(shù)據(jù)導(dǎo)入測繪數(shù)據(jù)編輯軟件CASS中做進一步處理,包括數(shù)據(jù)編輯、屬性設(shè)定、數(shù)據(jù)轉(zhuǎn)換等,完成全部處理任務(wù)后保存到數(shù)據(jù)庫中[5]。
2.5精度評估
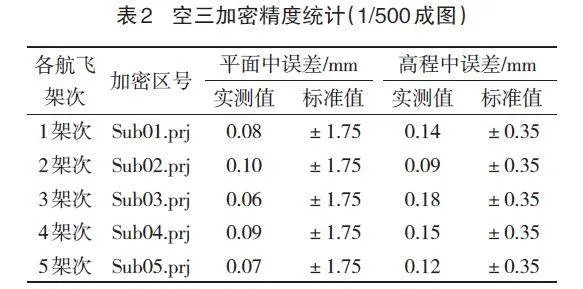
精度評估包括兩方面內(nèi)容,一是空三加密精度評估,二是地形圖精度評估。將檢查點數(shù)據(jù)導(dǎo)入到空三模型中并評估模型精度,結(jié)果如表2所示。
由表2數(shù)據(jù)可知,該空三加密的平面中誤差與高程中誤差的實測值均在標(biāo)準(zhǔn)限值以內(nèi),說明成圖精度可靠,能夠滿足工程需要,驗證了無人機低空攝影測量技術(shù)在該水利工程測量中的應(yīng)用效果。
根據(jù)《數(shù)字測繪成果質(zhì)量檢查與驗收》(GB/T18316—2008)中相關(guān)規(guī)定對本次測量所得1:500地形圖進行檢查,同時參考外業(yè)檢查點對地形圖精度進行評定。測區(qū)內(nèi)共有25個平面檢查點,統(tǒng)計各個檢查點的精度。這里選取前5個檢查點,精度統(tǒng)計結(jié)果如表3所示。
由表3數(shù)據(jù)可知,平面檢查點誤差在0.02~0.06m之間,滿足比例尺1:500地形圖的精度要求。
3結(jié)語
本文使用無人機低空攝影測量技術(shù)對某水利工程進行測量,繪制了測區(qū)的空三模型和地形圖。精度檢測結(jié)果表明,無論是空三加密精度還是地形圖平面檢查點精度均符合標(biāo)準(zhǔn)中規(guī)定的限值,證明在該工程中無人機低空攝影測量技術(shù)得到了成功應(yīng)用。
參考文獻
[1] 王培榮.基于低空無人機航空攝影測量技術(shù)的國土空間生態(tài)修復(fù)規(guī)劃研究[J].產(chǎn)業(yè)創(chuàng)新研究,2023(6):93-95.
[2] 寧鋼華.數(shù)字無人機低空攝影測量技術(shù)在城鎮(zhèn)地籍測量與管理中的應(yīng)用[J].數(shù)字技術(shù)與應(yīng)用,2020(5):257-258.
[3] 尹素秀.無人機低空攝影測量在城市測繪保障中的應(yīng)用前景探究[J].西部資源,2023(4):151-153.
[4] 吳申堯.植被密集區(qū)無人機載LiDAR航線優(yōu)化方法研究[D].重慶:重慶交通大學(xué),2024.
[5] 龔洲.基于航攝實景三維的地質(zhì)災(zāi)害調(diào)查與穩(wěn)定性分析研究[D].重慶:重慶交通大學(xué),2024.
