基于GNSS的前向散射雷達網目標穿越特性研究
2024-11-26 00:00:00鄭雨晴艾小鋒徐志明趙鋒肖順平楊勇
系統工程與電子技術 2024年8期







摘 要: 前向散射雷達可通過捕獲目標穿越基線時引起的信號擾動實現目標檢測,在隱身飛機目標探測方面具有一定潛力,目標穿越特性的研究對信號檢測和參數估計具有重要意義。首先構建了基于全球導航衛星系統(global navigation satellite system, GNSS)的前向散射雷達網模型,分析了構成前向散射觀測的條件和探測范圍。然后,基于前向散射動態信號模型,提出采用時頻域統計特征描述目標穿越基線的信號特性。最后,通過仿真分析了目標穿越位置和運動參數對散射信號及其統計特征的影響,揭示了前向散射信號的特征變化規律,對后續提高穿越事件檢測概率和參數估計精度具有參考價值。
關鍵詞: 雙基地雷達; 全球導航衛星系統; 信號模型; 前向散射; 統計特性
中圖分類號: TP 18
文獻標志碼: A
DOI:10.12305/j.issn.1001-506X.2024.08.08
Research on target crossing characteristics of forward scatter radar
net based on GNSS
ZHENG Yuqing, AI Xiaofeng*, XU Zhiming, ZHAO Feng,
XIAO Shunping, YANG Yong
(State Key Laboratory of Complex Electromagnetic Environment Effects on Electronics and
Information System, National University of Defense Technology, Changsha 410073, China)
Abstract: Forward scatter radar can achieve target detection by capturing the signal disturbance caused by the target’s crossing of the baseline. It has certain potential in stealth aircraft’s target detection. The study of target crossing characteristics is of great significance to signal detection and parameter estimation. Firstly, the forward scatter radar net model based on global navigation satellite system (GNSS) is constructed. The conditions and range of forward scattering observation are analyzed. Then, time and frequency domain statistical characteristics are proposed to describe the signal characteristics of the target’s crossing the baseline based on the forward scattering dynamic signal model. Finally, the influence of target crossing position and motion parameters on the scattering signal and its statistical characteristics is analyzed through simulations. The variation law of the forward scattering signal characteristics is revealed, which provides the reference value for subsequent improvement of detection probability of crossing events and parameter estimation accuracy.
Keywords: bistatic radar; global navigation satellite system (GNSS); signal model; forward scatter; statistical characteristics
0 引 言
前向散射雷達(forward scatter radar, FSR)是一種特殊的雙基地雷達。一般認為雙基地角大于135°時構成前向散射,目標的雷達散射截面(radar cross section, RCS)隨著雙基地角的變大而迅速增大,通常比單基地RCS大數十dB,可見FSR具備出色的反隱身性能[1-4],已被廣泛應用于空中目標監視[5-6]、地面目標分類[7-10]等軍事和民用領域。已有研究證明了全球導航衛星系統(global navigation satellite system, GNSS)接收機能夠感知到越過衛星-接收機基線的目標[11-12]。直觀上看,當目標越過基線時,由于陰影遮擋效應,接收功率會明顯下降[13]。文獻[14]利用電磁計算分析了目標散射場與輻射場矢量隨距離和方位的起伏特性。仿真結果表明,前向散射區為雙基地角β=180°±45°以內的很大角度,目標靠近基線時,前向散射回波有劇烈振蕩,這為FSR目標檢測提供了條件。
對于地面FSR,文獻[15-19]分析了矩形目標前向散射信號模型,并與實驗數據進行了對比。處理后的信號類似于雙側啁啾信號,通過信號處理技術可獲得目標速度、與基線交叉位置、RCS等估計值,利用這些估計值能夠實現目標識別[20-21]。
基于GNSS的外輻射源雷達具有覆蓋范圍廣、隱蔽性好等優點,其與FSR進行結合可用于監視重要區域,對國防安全具有重要意義。文獻[13,22-24]中給出了基于GNSS的FSR中的前向散射信號模型,提出了陰影逆合成孔徑雷達(shadow inverse synthetic aperture radar, SISAR)成像方法,在實驗中捕獲了飛機目標前向散射信號。文獻[25]基于暗室測量數據分析了前向散射回波信號的特性,文獻[26]通過實驗證明了利用FSR網實現目標探測的可行性。
對于地面目標,系統構型決定了目標會精準穿越基線,而空中目標則不具備這一特點,目標可能在基線附近某一范圍內出現,接收機通過分析接收信號特性判斷是否有前向散射波存在。當前,基于GNSS跟蹤環路的散射信號提取方法得到了許多實驗驗證,但通過散射信號判斷目標是否在基線附近的研究較少,特別是一些目標參數估計算法需要預先獲取穿越時刻、多普勒斜率估計值[27-29],這就要求通過前向散射信號特征識別出目標運動軌跡是否穿越基線或在基線附近,即判斷該接收信號能否獲得可用的估計值。
為了分析以上問題,進一步討論目標參數對前向散射信號特性的影響,本文首先構建了基于GNSS的FSR網模型,分析了目標前向探測區域,就目標穿越位置、速度、運動方向對散射信號特性的影響進行了仿真分析,采用時頻域統計特征描述目標穿越特性,通過仿真證實了目標穿越特性分析的正確性,為后續通過前向散射信號判斷穿越事件以及估計目標運動參數奠定了基礎。
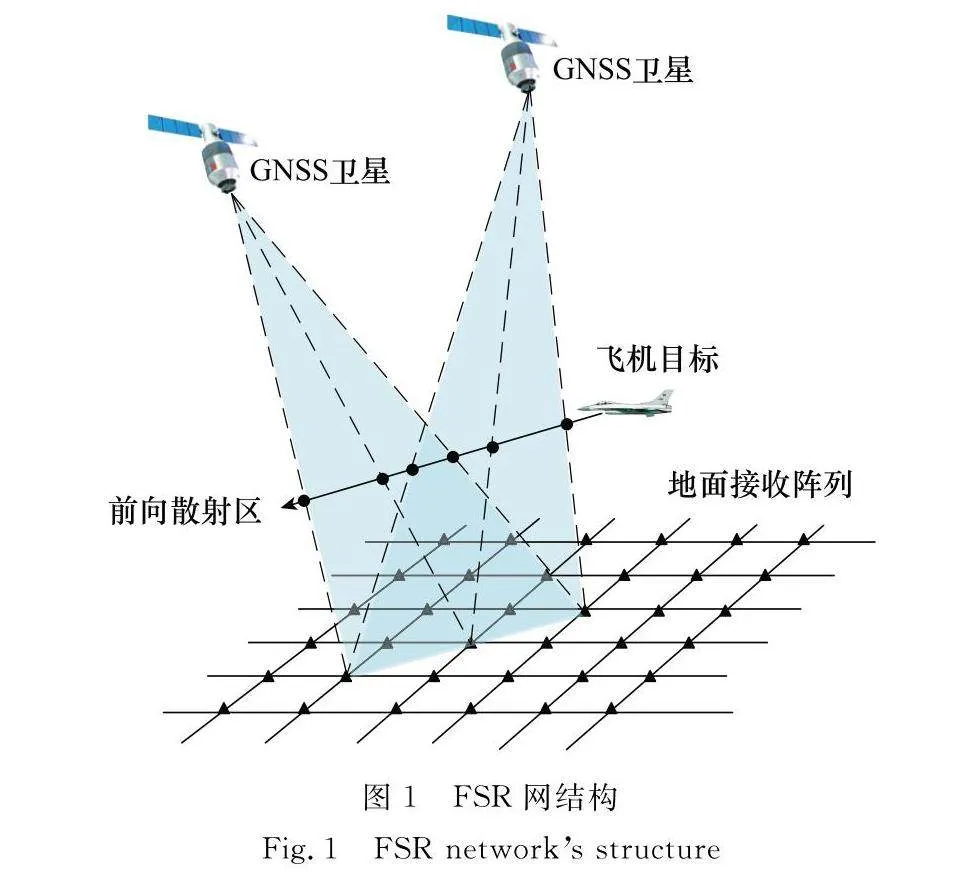
1 基于GNSS的FSR探測能力分析
本文考慮基于GNSS的天發地收FSR網,以廣泛存在的衛星導航信號為輻射源,通過在地面部署稀疏的接收陣列實現目標探測,如圖1所示。在三維空間中,目標精準穿越衛星與接收站之間連線的概率極低,接近于零,需尋找到目標可被探測的臨界條件,來確定單基線的目標探測范圍。
1.1 平板目標前向散射RCS分析
由雙基地雷達方程可知,目標散射信號功率受目標RCS調制,故首先分析目標RCS的計算方法。在前向散射區中,可通過尋找均勻照明孔徑的衍射圖案來計算復雜物體的RCS,孔徑形狀需與目標物體輪廓形狀相同。在實際環境中,探測目標為飛機,但由于其種類和尺寸不同,其RCS無法使用較簡單的函數進行擬合,且RCS對接收信號包絡具有不同的調制作用。為了便于初始快速分析,選用平板目標,在給定目標尺寸、運動方向及目標與接收機的距離后,平板目標RCS曲線可擬合為雙基地角的函數,便于后續確定前向散射可探測區域。不同類型目標的前向散射探測區域分析可通過代入不同的RCS實現。
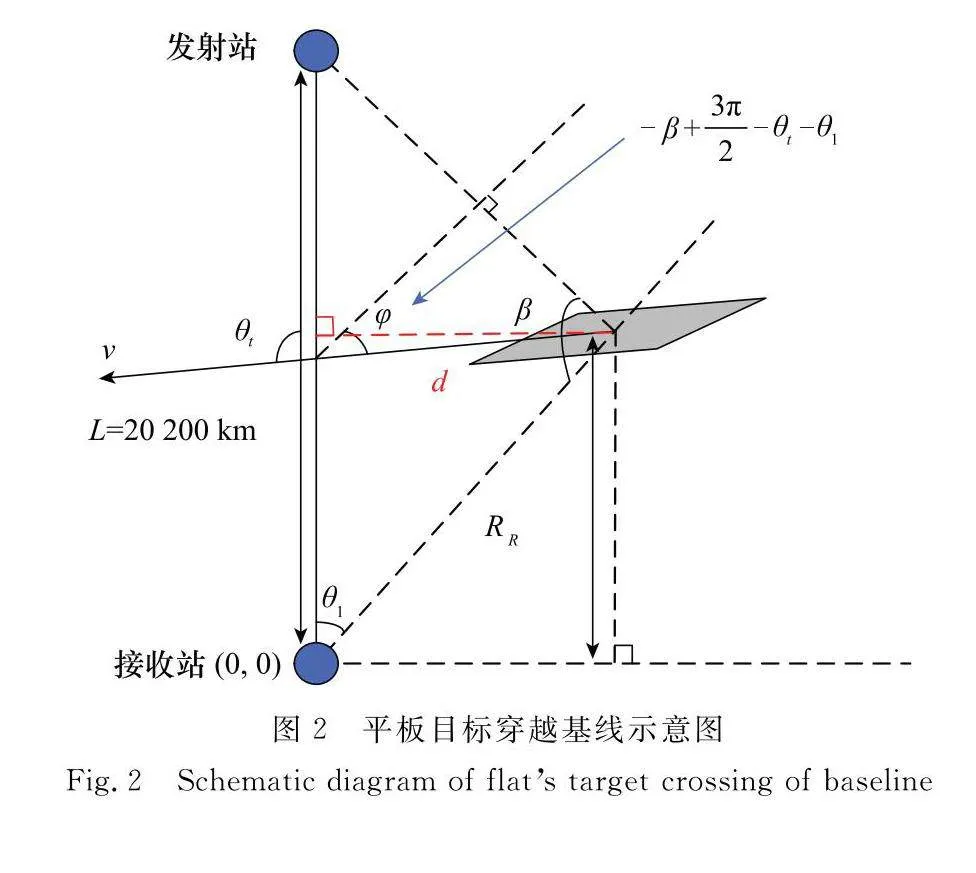
圖2為平板穿越發射機與接收機連線的示意圖。
其中,v為目標速度,RR為目標與接收機的距離,d為目標與基線的距離,基線長L=20 200 km,θt為目標運動方向與基線的夾角,β為雙基地角,θ1為基線和目標-接收機連線的夾角,θ為發射機與接收機相對于目標的視線夾角,φ為目標運動方向矢量與垂直于發射機-目標連線的直線的夾角。
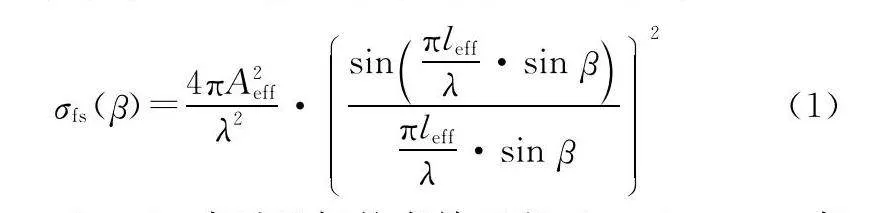
文獻[19]給出了平板目標前向散射RCS計算公式:
σfs(β)=4πA2effλ2·sinπleffλ·sin βπleffλ·sin β2(1)
式中:Aeff=leff·heff表示目標的有效面積;leff=l·cos φ表示目標的有效長度;heff=h;l和h分別為目標長度和寬度;λ為信號波長。
可知φ=-β+32π-θt-θ1,且有
θ1=π-β-arcsinRRsin βL(2)
當給定目標雙基地角β、目標與接收機的距離RR及目標運動方向θt后,目標RCS可求。
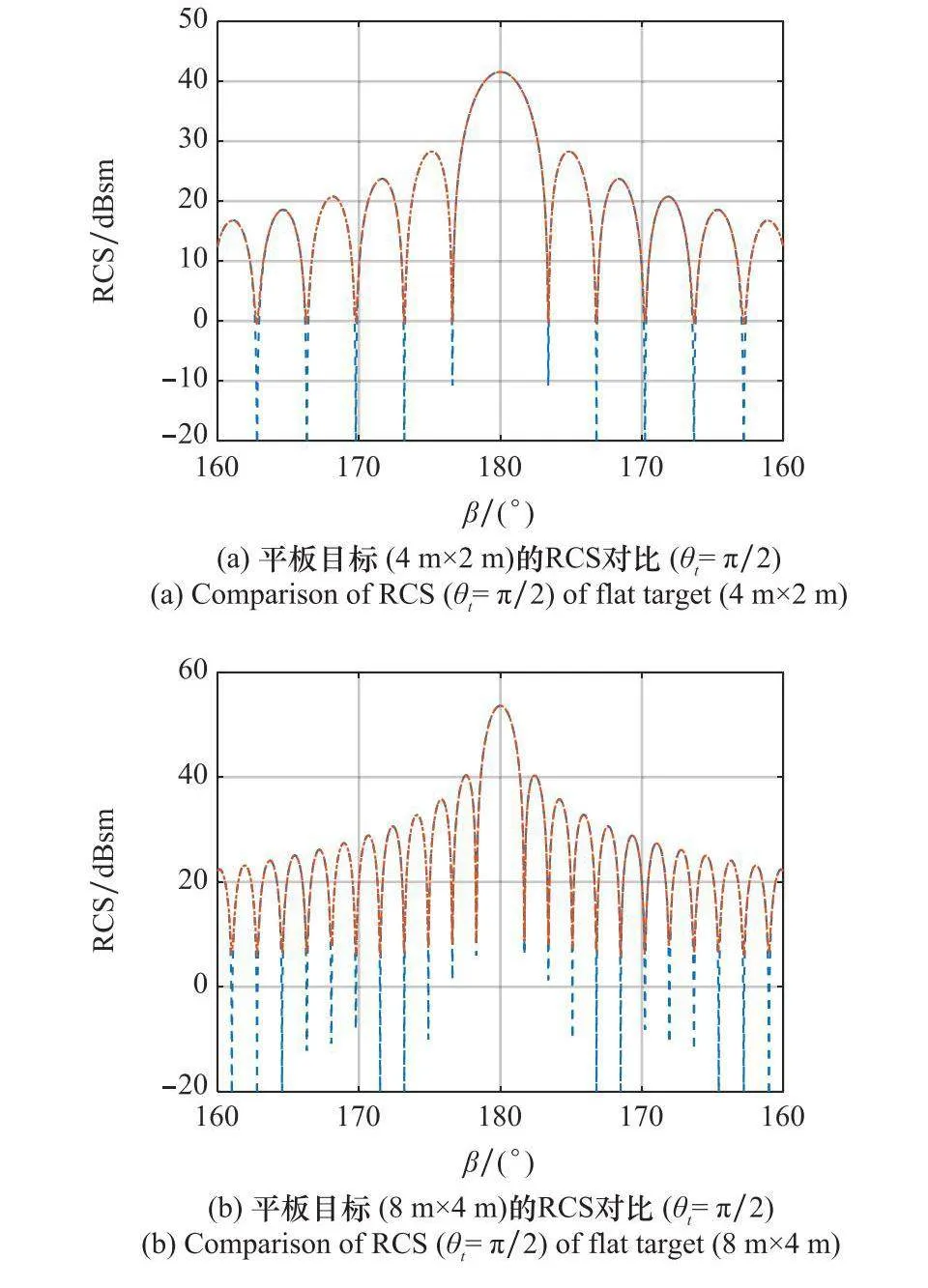
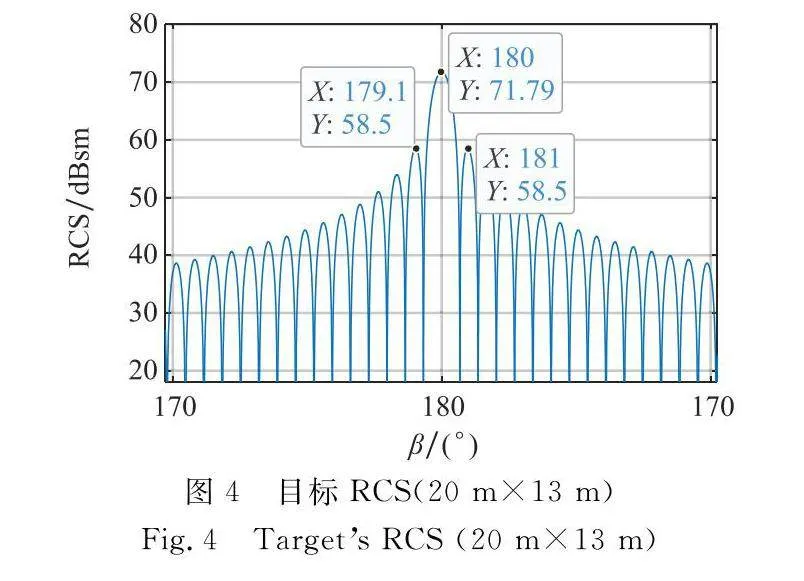
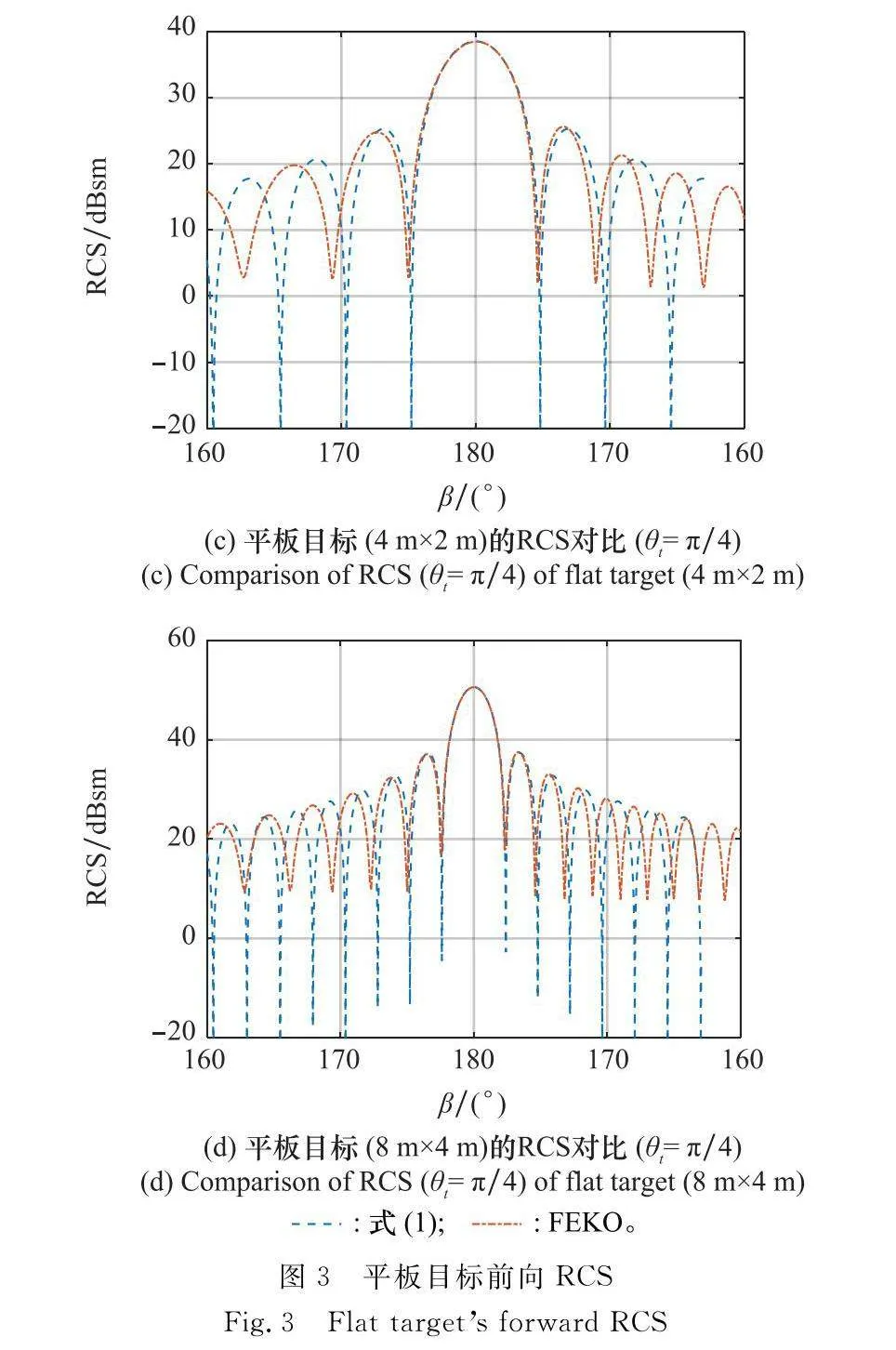
為驗證上述公式的有效性,利用通用電磁軟件計算相同尺寸平板目標的RCS,如圖3所示,頻率設為1 268.52 MHz。RCS計算式(式(1))與FEKO計算結果在β=180°附近能夠較好地吻合,在雙基地角小于第二峰值點對應的雙基地角時擬合誤差較大,但此時目標回波沒有前向散射優勢,難以用于目標探測。
值得說明的是,目標尺寸越大,RCS峰值越大,第一峰值點與第二峰值點間的距離越小,第二峰值點周圍的RCS值越大,也能滿足目標探測條件,但隨著雙基地角變化,檢測過門限會不連續。
1.2 前向散射可探測區域分析
考慮信號處理增益,前向散射信號信噪比可以表示為
SNRRF=EIRP·GRλ2σfsGSP(4π)3R2TR2RKBTeffBFnLS(3)
式中:EIRP為GNSS衛星的等效輻射功率;GR為接收天線增益;σfs為目標前向RCS;RT和RR分別是目標到發射機的距離和目標到接收機的距離;LS是綜合損耗;KB為玻爾茲曼常數;Teff為等效噪聲溫度;B為接收機帶寬;Fn為噪聲系數;GSP為信號處理增益。接收機通過信號積累提升信噪比,對于Beidou B3I信號,積分時間應小于20 ms,相干積累信噪比的提升約為53 dB,也可采用非相干積累進一步提升信噪比[30]。
將目標RCS表達式(式(1))代入式(2),前向散射信號最終信噪比可以表示為
SNR=EIRP·GRA2effsinc2πleffsinπ-βλGSP(4π)2R2TR2RKBTeffBFnLS(4)
可見除了已經確定的系統參數,散射信號信噪比與目標雙基地角β、信號處理增益GSP及目標到接收機距離RR的取值有關。利用目標信號可檢測信噪比條件,可建立以下不等式:
SNR≥SNRthreshold(5)
式中:SNRthreshold為設定的信噪比門限。
進一步,目標雙基地角需滿足的條件為
sinc2πleffsinπ-βλ≥SNRthreshold(4π)2R2TR2RKBTeffBFnLSEIRP·GRA2effGSP(6)
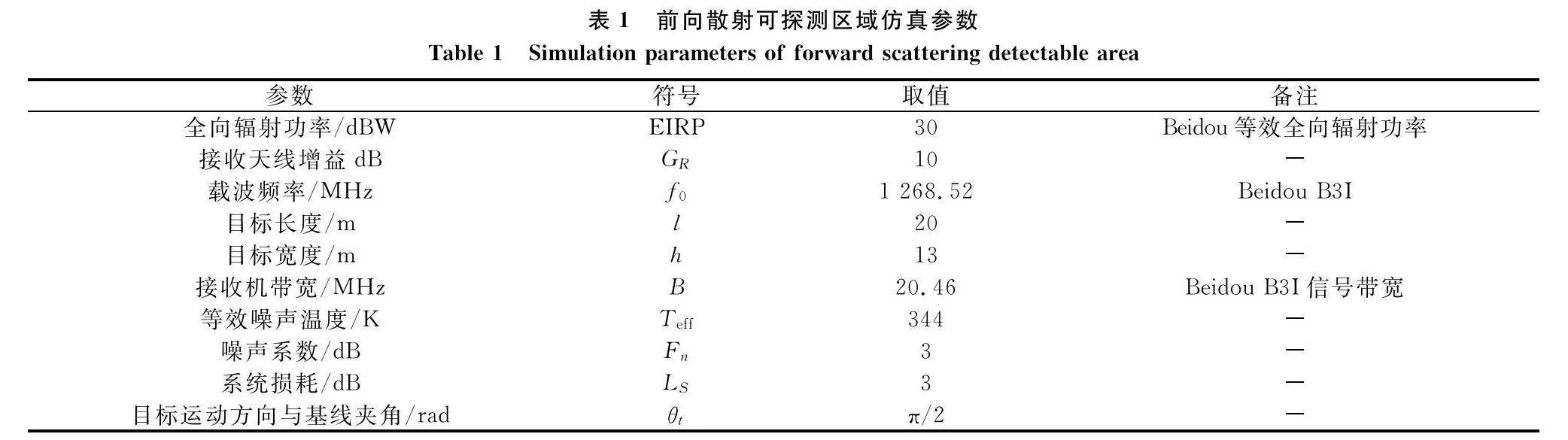
利用式(6)即可得到滿足目標探測條件時的目標雙基地角閾值。通過仿真分析回波信噪比與雙基地角β,以及目標到接收機距離RR之間的關系,設置仿真參數如表1所示。
表1 前向散射可探測區域仿真參數
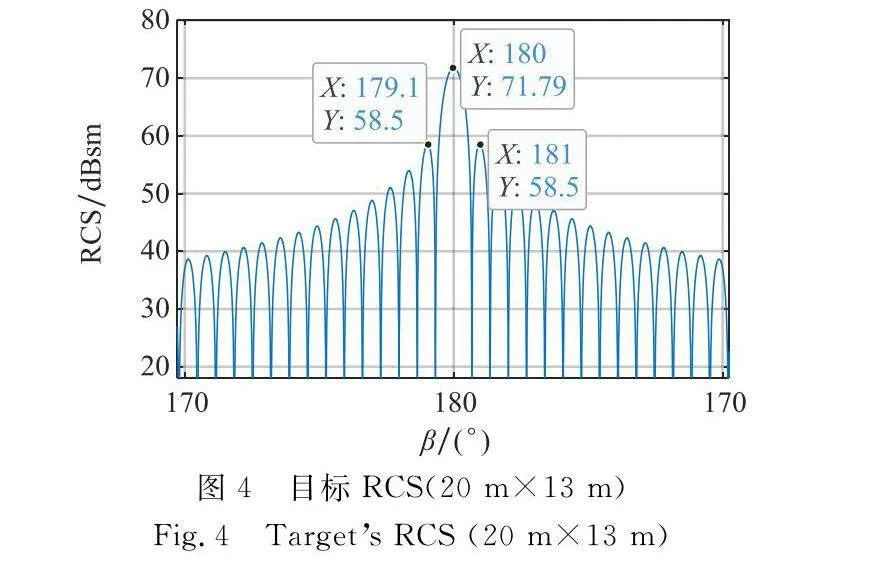
Table 1 Simulation parameters of forward scattering detectable area參數符號取值備注全向輻射功率/dBWEIRP30Beidou等效全向輻射功率接收天線增益dBGR10-載波頻率/MHzf01 268.52Beidou B3I目標長度/ml20-目標寬度/mh13-接收機帶寬/MHzB20.46Beidou B3I信號帶寬等效噪聲溫度/KTeff344-噪聲系數/dBFn3-系統損耗/dBLS3-目標運動方向與基線夾角/radθtπ/2-目標RCS仿真結果如圖4所示,目標前向散射RCS僅在雙基地角為179°~181°時可利用第一峰值點周圍區域進行探測,即探測區域會限制在很小的角度范圍內,如果要利用目標前向散射RCS第二或第三峰值點附近區域進行目標探測,則需要通過增加接收天線增益或提高信號處理增益等方式實現。
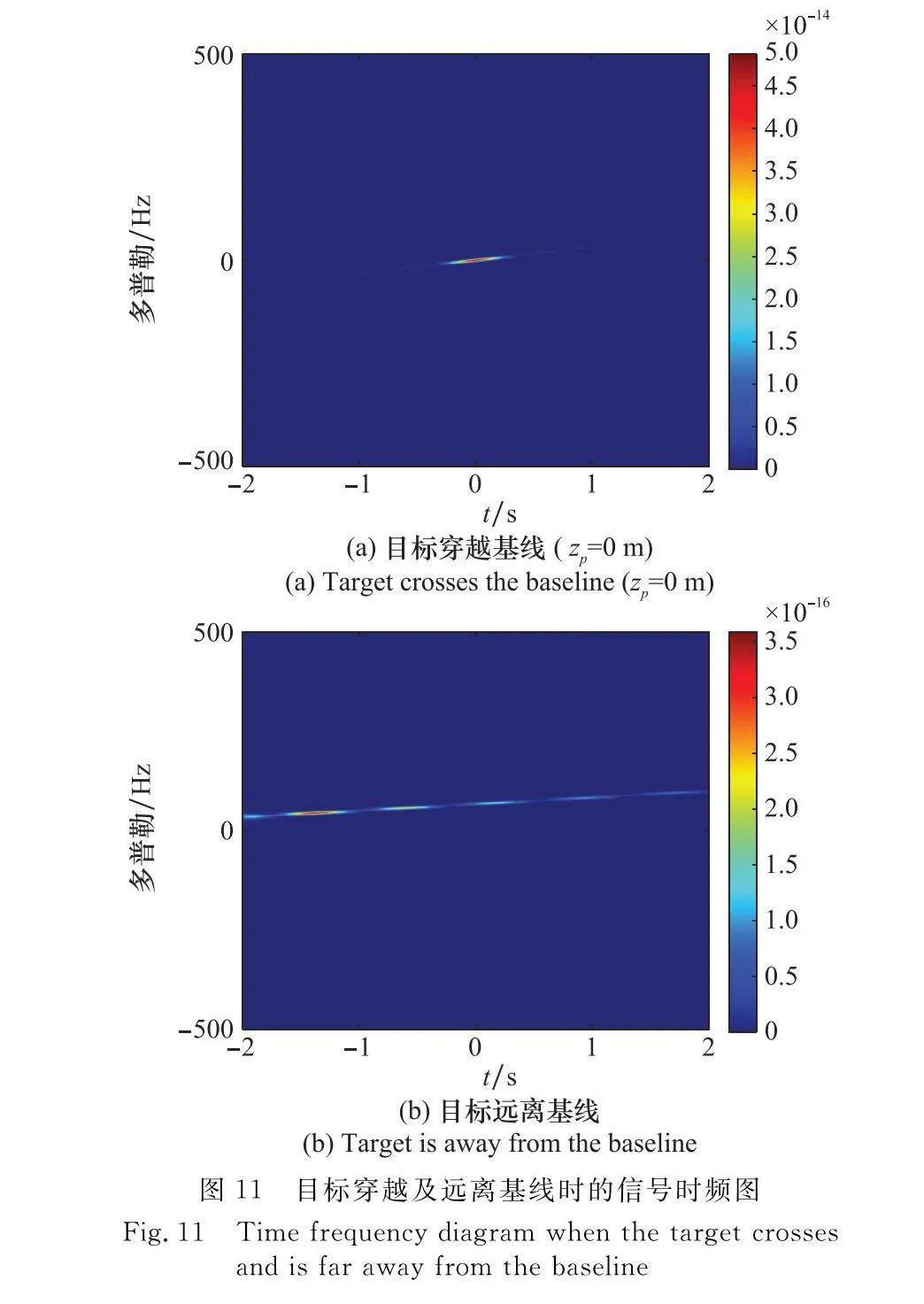
仿真中,設定SNRthreshold=12 dB,圖5(a)給出了不同雙基地角β和不同目標到接收機距離RR下的散射信號信噪比。圖5(b)為RR=4 km及RR=8 km時目標散射信號的信噪比變化,可見目標與接收機距離越遠,散射信號信噪比越低,目標可檢測角度范圍就越小,僅在180°附近信噪比才能滿足檢測要求。
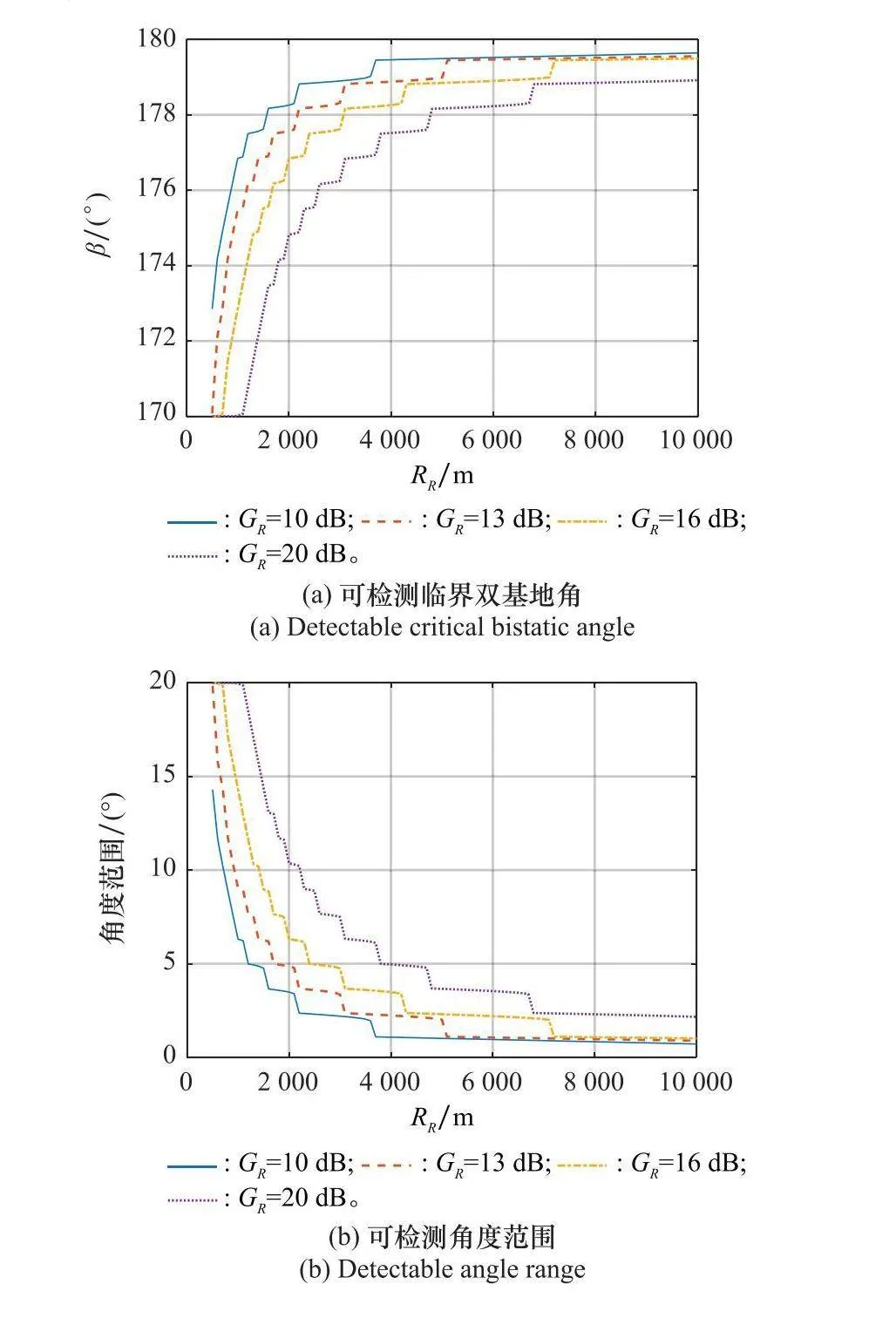
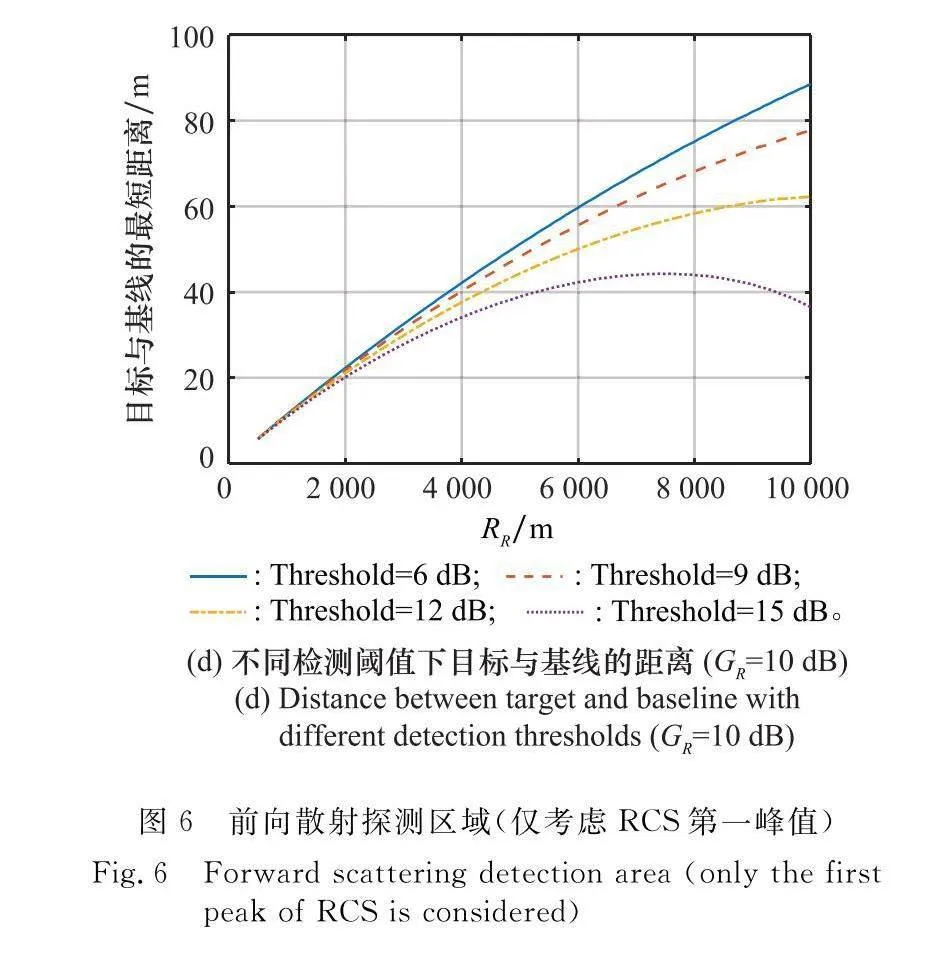
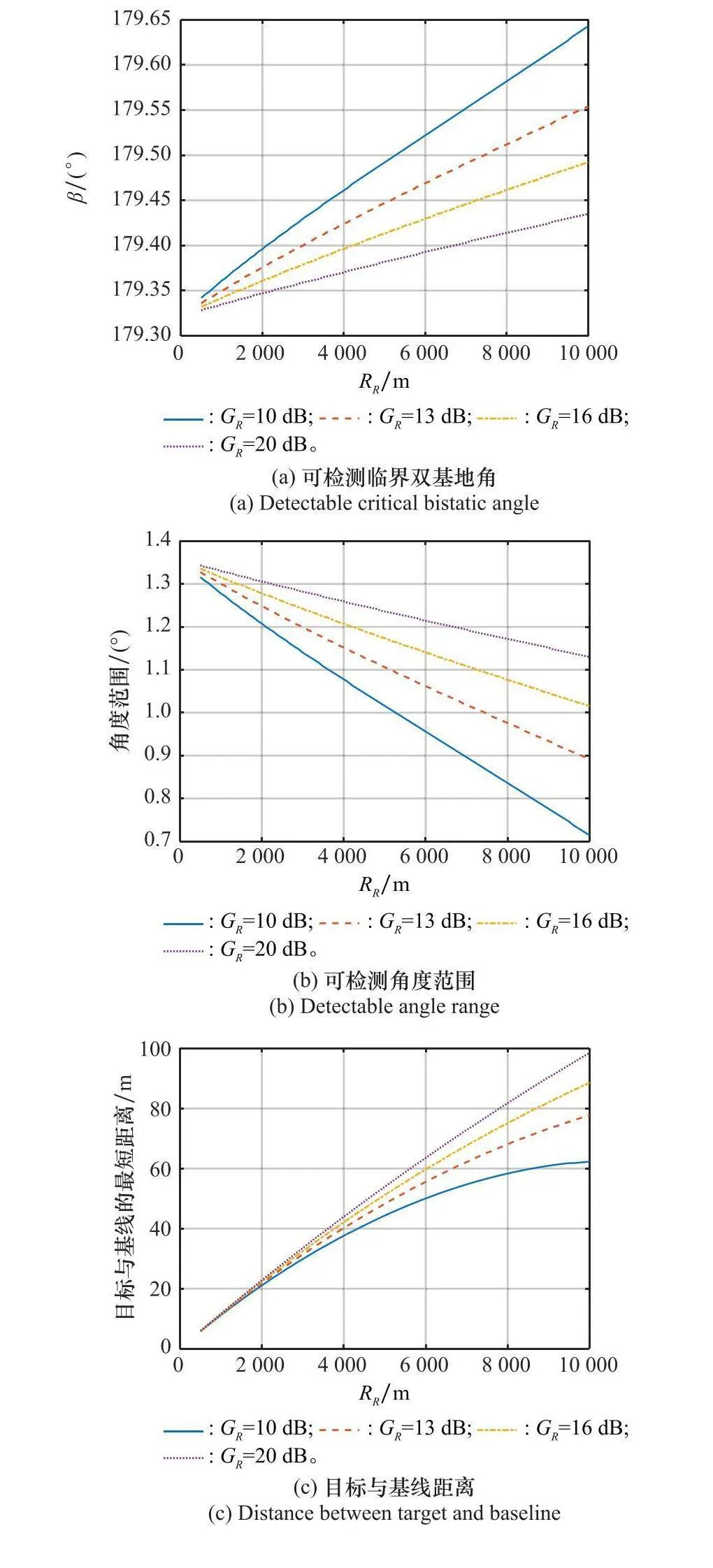
圖6給出了僅考慮目標前向RCS主峰寬度條件下不同GR和RR下的可探測角范圍及目標與基線的距離d。由圖6(c)可知,隨著接收天線增益的增加,可實現目標檢測要求的雙基地角減小,目標到基線的最小距離d增大,可檢測的雙基地角范圍增大,說明有利于目標前向探測。隨著RR增大,可實現目標檢測要求的雙基地角增大,可檢測的雙基地角范圍減小,但由于幾何關系,目標到基線的最小距離越大,說明越有利于目標前向探測,但距離增加到一定程度后增長程度逐漸減小。總體而言,目標穿越時到基線的最小距離d最大可達百米量級,要利用前向散射探測目標,實際中仍然存在較大困難,可進一步延長積分時間或采用非相干積累處理,獲得更高的信號處理增益,增加目標可檢測的角度范圍,此時對檢測閾值的選擇要求較高。圖6(d)分析了不同檢測信噪比閾值對探測能力的影響,可見隨著信噪比閾值的逐漸減小,目標運動時與基線的最短距離d逐漸變大。
當接收天線增益為10 dB時,和接收機相距10 km的目標獲得的最大可探測區域面積約為104 m2,對于空中目標探測覆蓋區域較小。和接收機的距離小于6 km的目標,可探測區域仍然較小,增大接收增益可以擴大探測區域,但接收增益越大,接收天線孔徑就越大,導致更高的構建雷達探測系統的成本。由仿真結果可知,目標與接收機距離在6~10 km時,前向探測范圍較大,通過調整接收增益,使GR=20 dB,目標可探測臨界點與基線的距離dgt;60 m。在實際中,可適當放松對檢測閾值的要求,若調整檢測閾值為6 dB,GR=10 dB,目標可探測臨界點與基線的距離也滿足dgt;60 m。
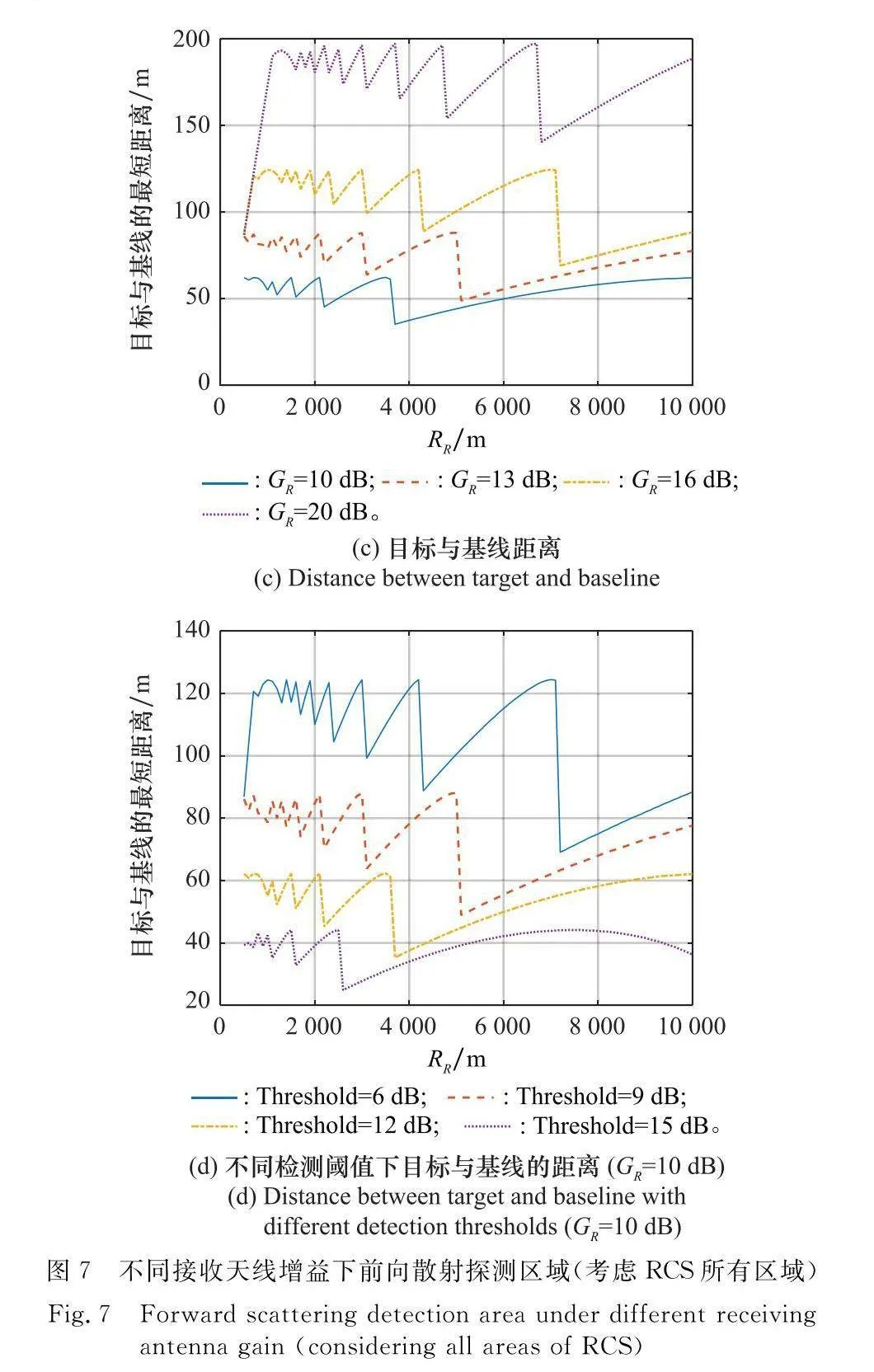
圖7給出了將RCS非主峰部分考慮在內的情況。當目標與接收機距離較近時,信噪比可能達到檢測門限,此時雙基地角比RCS主峰附近對應的雙基地角更小,可檢測的雙基地角范圍更大,目標到基線的最小距離更大,說明提高了目標的探測能力。
但將RCS非主峰部分包含在內來計算雙基地角,目標運動可能會使散射信號信噪比急劇下降。當GR=10 dB、目標與接收機距離小于3.7 km時,會出現RCS非主峰對應區域可滿足檢測閾值的情況。由圖4可知,目標RCS主峰周圍對應雙基地角應大于179°,故圖7(a)中小于該值的雙基地角都對應RCS非主峰部分,出現了目標探測不連續問題,導致圖7(c)中目標到基線的距離劇烈起伏。當改變信號檢測閾值后,如圖7(d)所示,閾值越低,目標與基線的最短距離波動越劇烈,在較小的雙基地角處就能滿足檢測條件,對應的RCS值到主峰經過的旁瓣就越多。
2 前向散射信號時頻域統計特性
2.1 前向散射信號建模
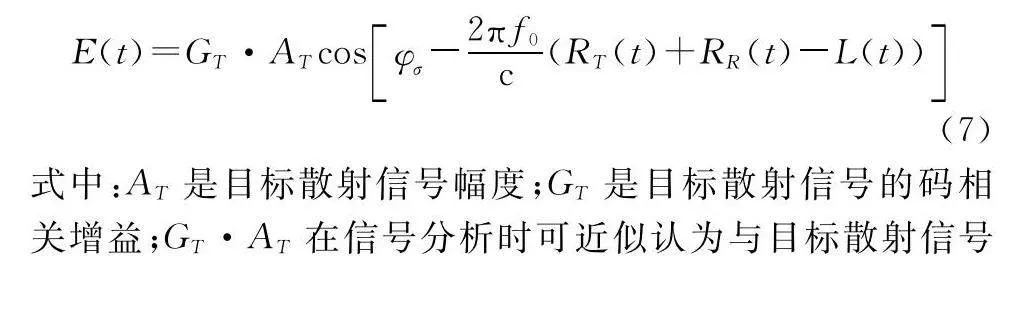
在考慮衛星運動、接收機靜止的系統背景下,處理后的前向散射信號可表示為
E(t)=GT·ATcosφσ-2πf0c(RT(t)+RR(t)-L(t)) (7)
式中:AT是目標散射信號幅度;GT是目標散射信號的碼相關增益;GT·AT在信號分析時可近似認為與目標散射信號振幅的變化趨勢一致,即GT·AT=2PR;PR是目標散射信號功率;L是衛星到接收機之間的距離;φσ是目標的散射相位;f0是載波頻率;c是光速。
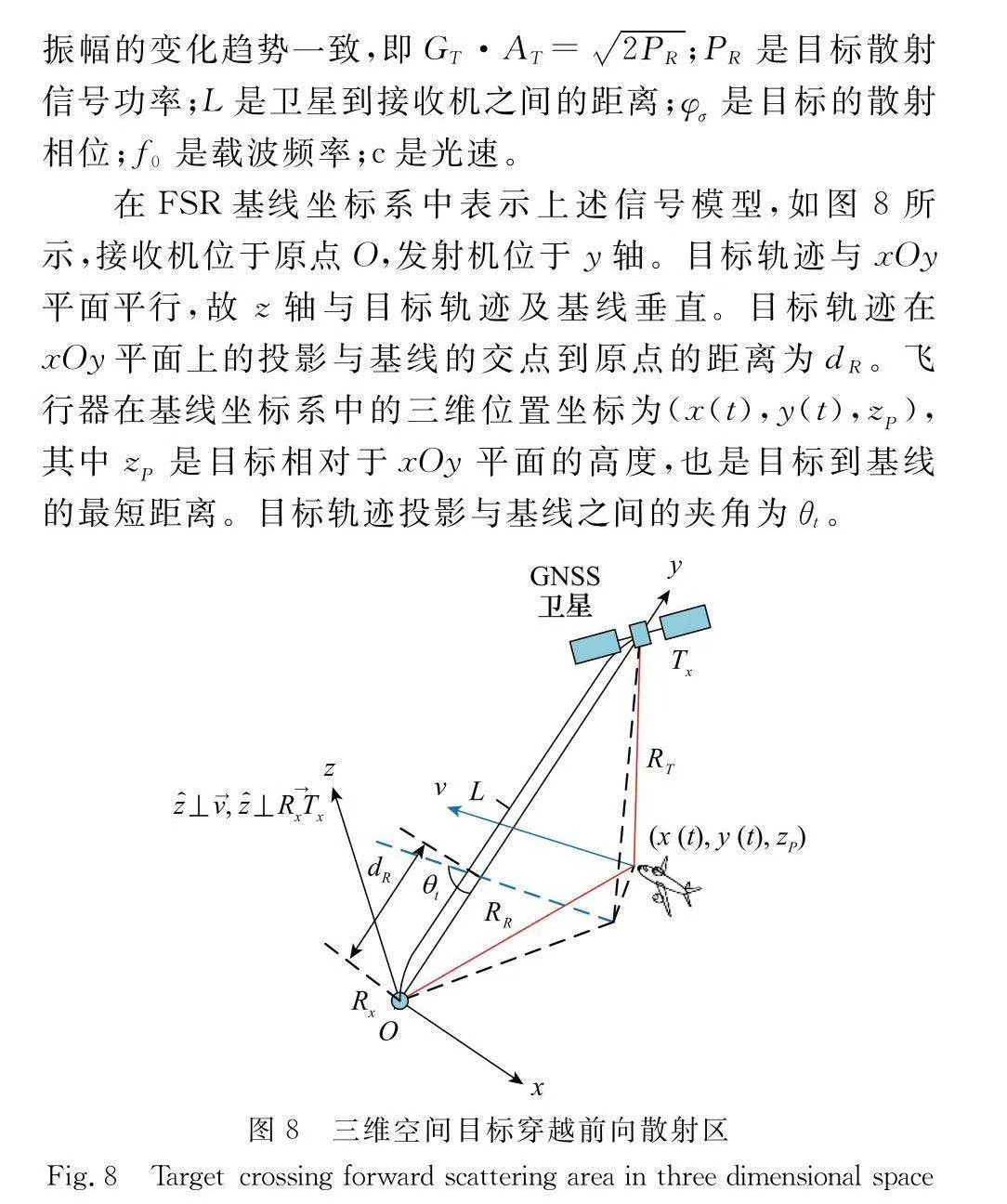
在FSR基線坐標系中表示上述信號模型,如圖8所示,接收機位于原點O,發射機位于y軸。目標軌跡與xOy平面平行,故z軸與目標軌跡及基線垂直。目標軌跡在xOy平面上的投影與基線的交點到原點的距離為dR。飛行器在基線坐標系中的三維位置坐標為(x(t),y(t),zP),其中zP是目標相對于xOy平面的高度,也是目標到基線的最短距離。目標軌跡投影與基線之間的夾角為θt。
前向散射信號[23]的表達式為
Er(t)≈GT·ATcosπK′rt2+πz2PdRλ-φσ(8)
式中:K′r是調頻率,單位為Hz/s,表示為
K′r=v2sin2θtdRλ(9)
可知前向散射信號近似為線性調頻信號,幅度的變化趨勢與RCS一致,因此會出現幅度振蕩現象。由信號模型可知,目標穿越位置到接收機的距離dR以及目標到基線的最小距離zP包含在載頻信號中,目標速度v和運動方向θt包含在調頻率中,若能夠獲得調頻率估計值,則可以實現目標運動參數估計。通過尋找前向散射信號中反映其屬性的特征參數,實現對目標不同穿越位置和穿越時刻的信息的判斷,下面分別從時域和頻域建立統計特性參數模型,基本原則是盡量最大化特征區分度。
2.2 時域統計特性
接收信號有兩種情況:① 無目標情況,接收信號包括直達波和其他雜波;② 目標出現在基線附近,可被接收機檢測,接收信號由直達波、目標散射信號和其他雜波構成。由GNSS接收機的信號處理過程可知,當僅有直達波時,接收機的載波跟蹤環可復制出同頻率的載波信號,實現載波剝離,再利用碼跟蹤環路獲得偽碼序列,實現偽碼剝離,接收信號中只剩下數據碼,可認為最終得到的信號是直流分量,可被濾除,故第①種情況容易區分。
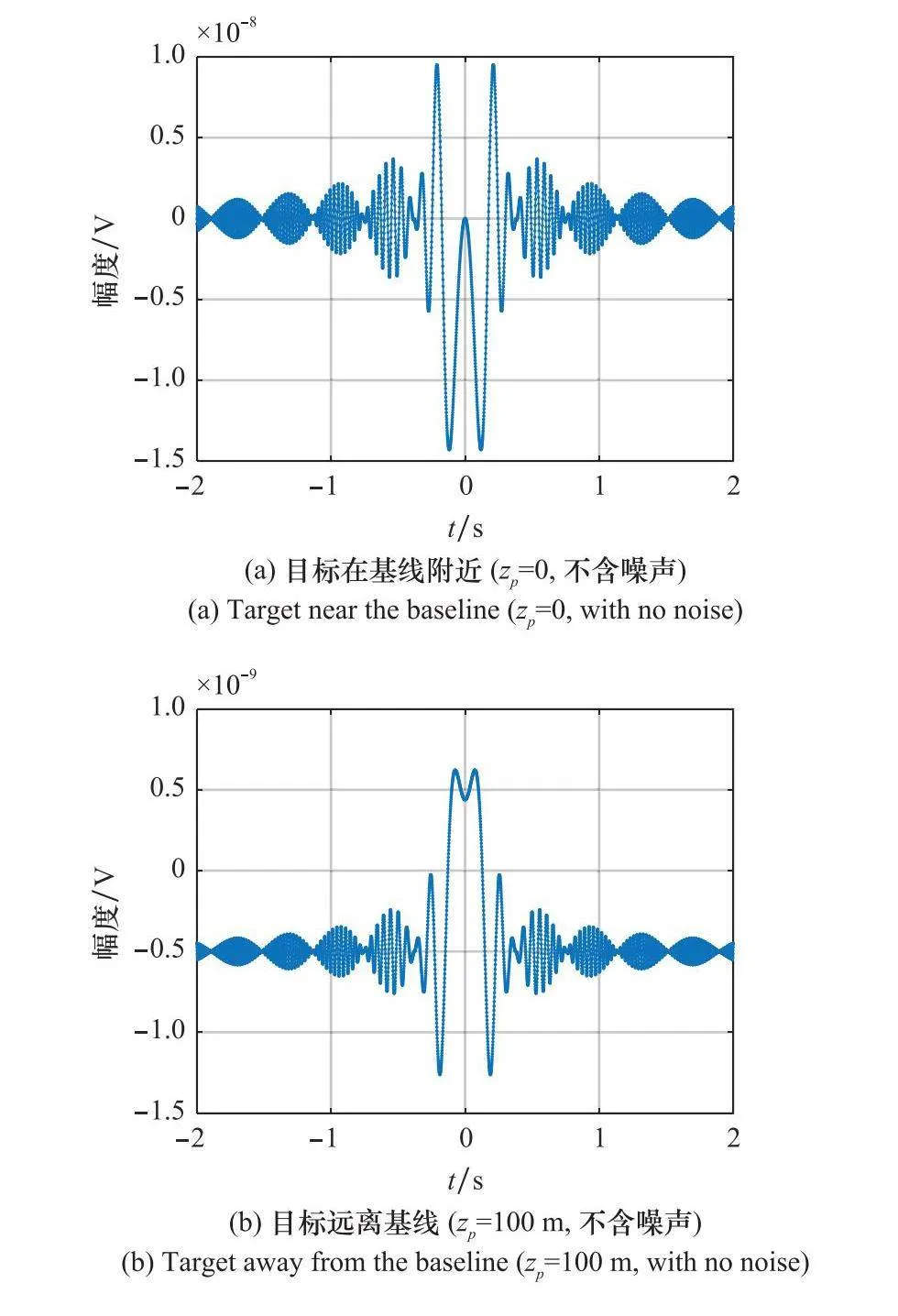
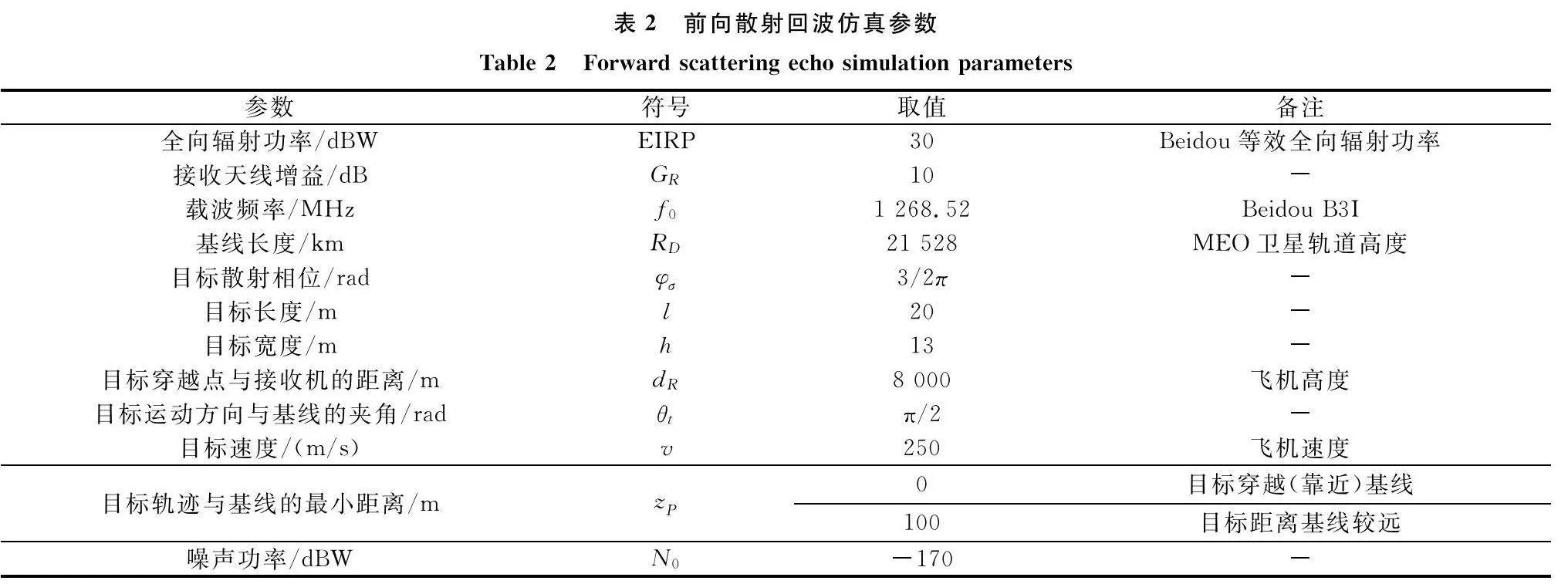
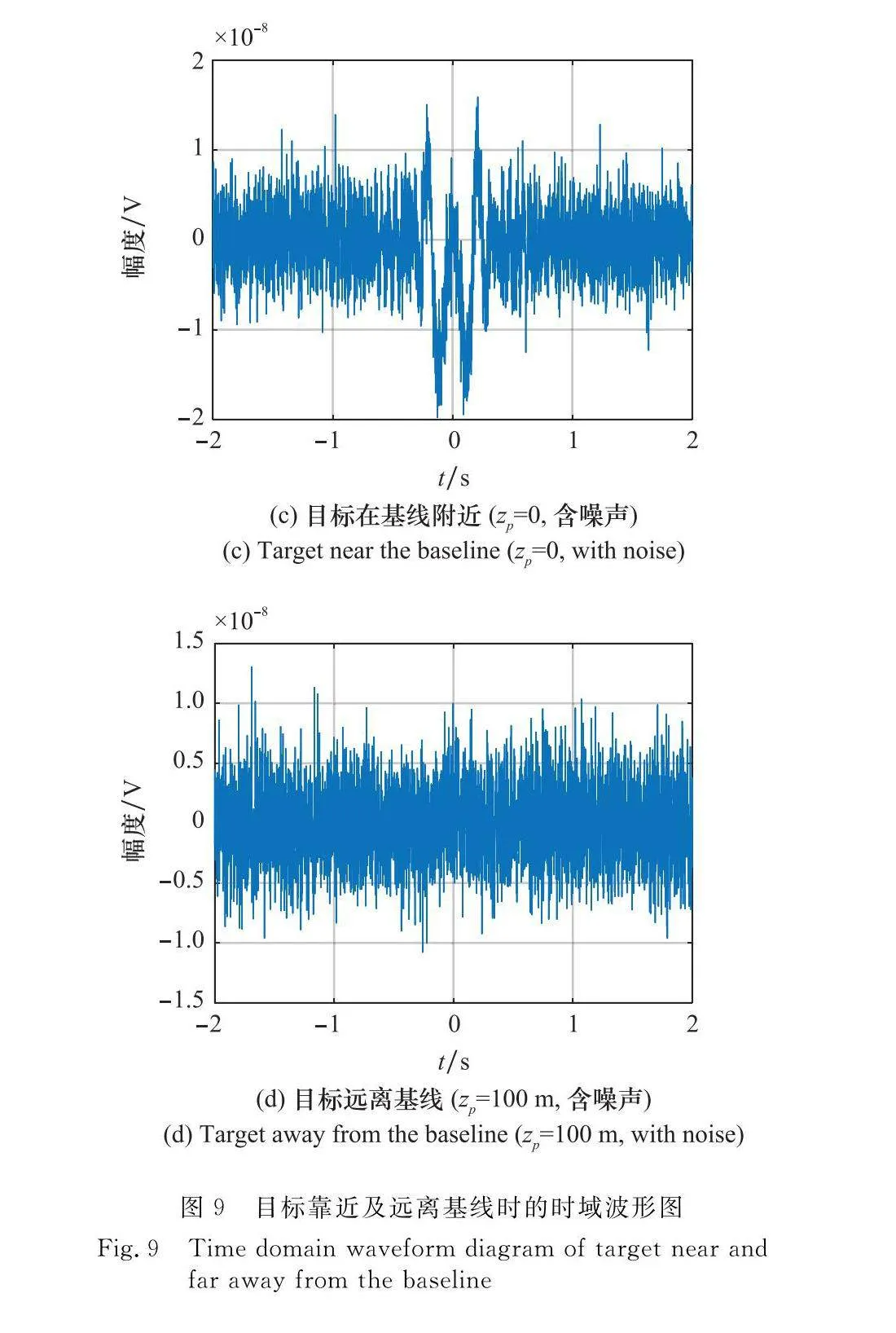
當前向散射區目標RCS急劇增大時,由于RCS對信號幅度的調制,信號幅度會產生較大程度的變化,因此考慮能夠表征信號波動程度的時域特征值。圖9中給出了不同zP下的信號時域波形圖,仿真參數如表2所示,可見兩者的波動程度具有一定區別。
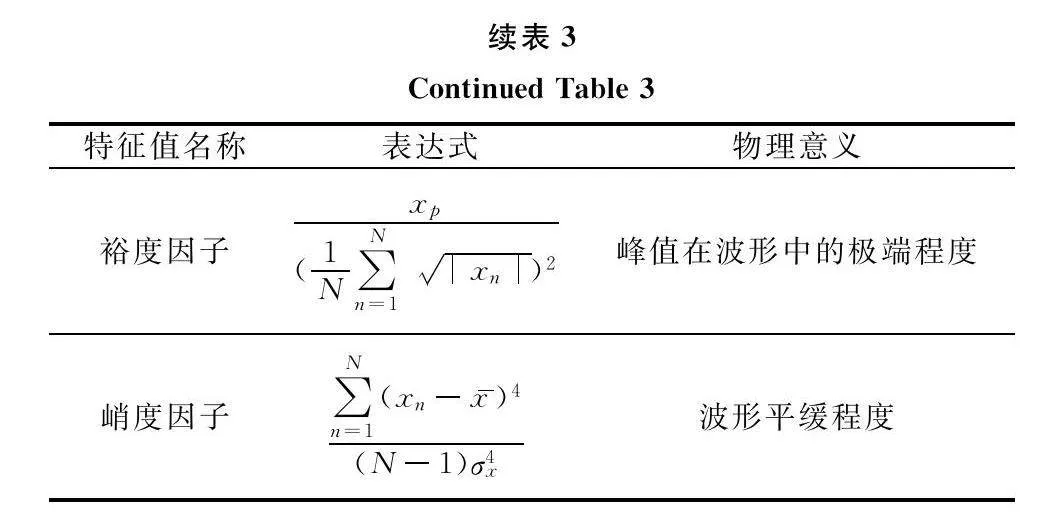
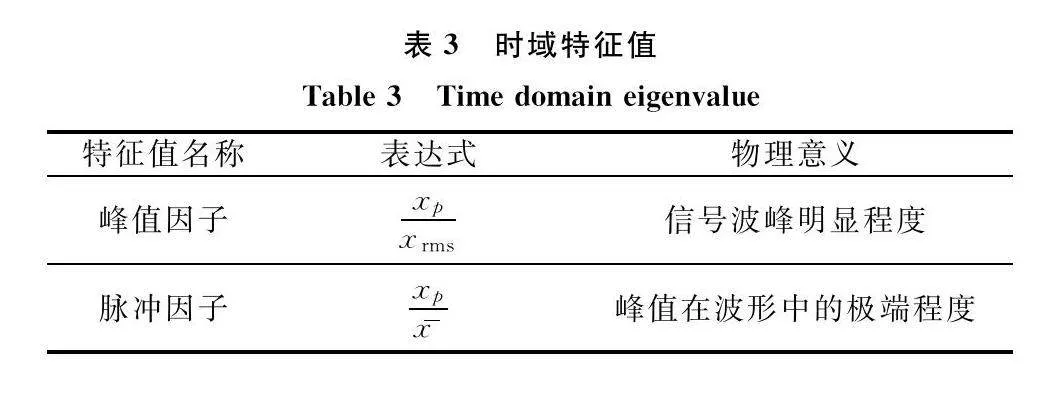
通過對仿真信號的分析可以看到,目標在不同距離上穿越基線時的波形存在差別,通過時域特征能夠加以區分。基于以上對信號時域特點的認知,本文精選了4種表征信號時域特性的無量綱特征值,如表3所示。其中xP為峰值,xrms為均方根,x-為平均值,σx為標準差,xn表示在時刻n信號的幅度,N為信號采樣點數。
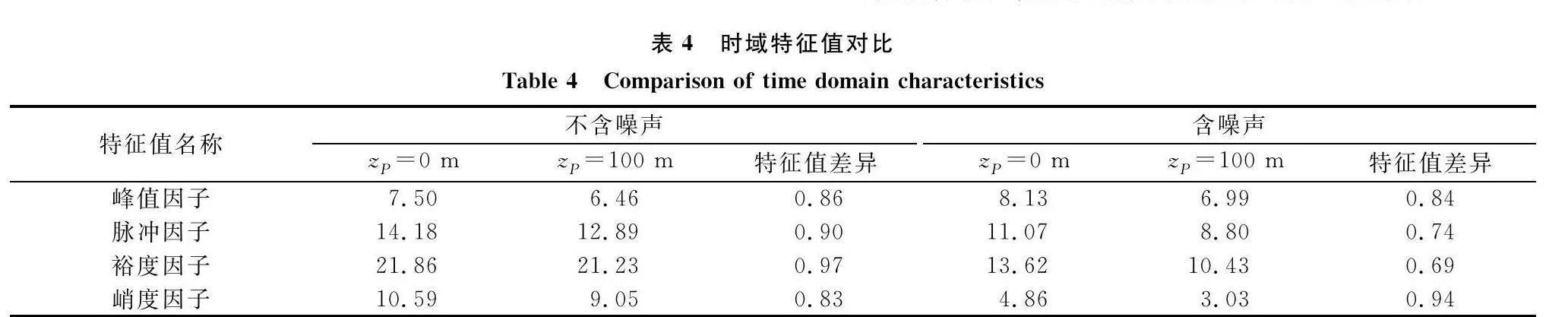
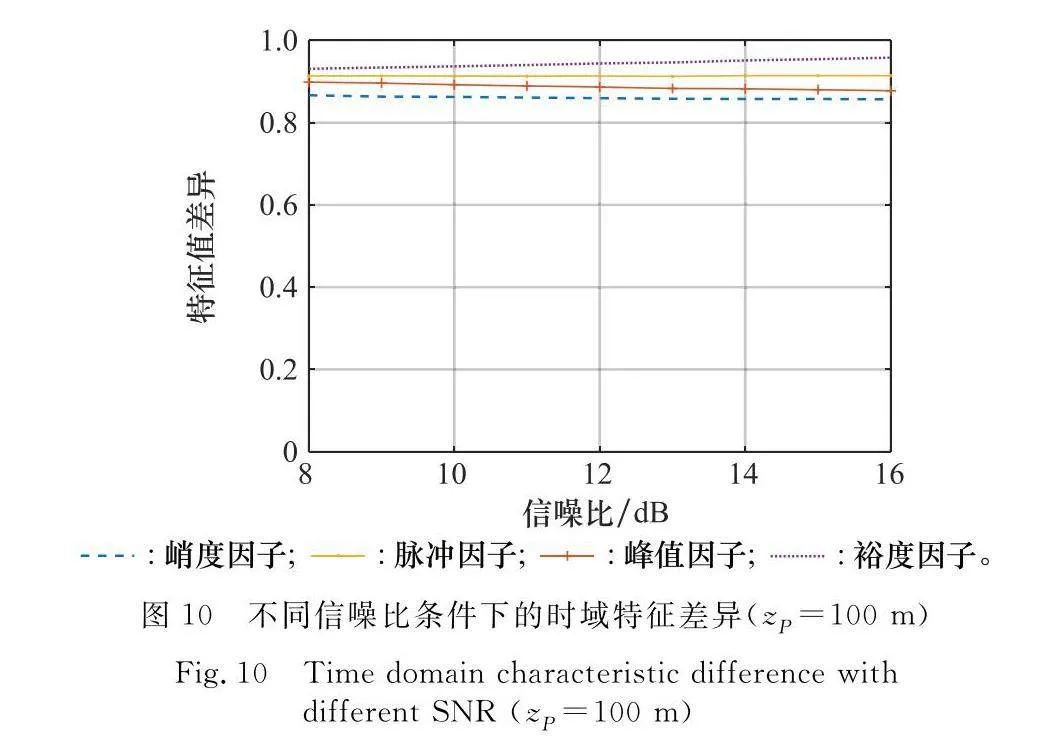
計算上述兩種情況下信號的時域特征值如表4所示,假設zP=0時的特征值為c0,zP=100 m時的特征值為c,特征值差異定義為c/c0,該值越遠離1,表示差異越大。由計算結果可知,兩者的特征值具有明顯差異,脈沖因子和裕度因子在含有噪聲的情況下差異較大,峰值因子在有無噪聲時的差異值變化不大,而峭度因子在含有噪聲時差異值較小。在不同信噪比下,zP=100 m時的特征差異如圖10所示。當信噪比由8 dB增加到16 dB時,特征差異值的變化小于0.05,說明各特征值差異的大小受噪聲的影響不大。
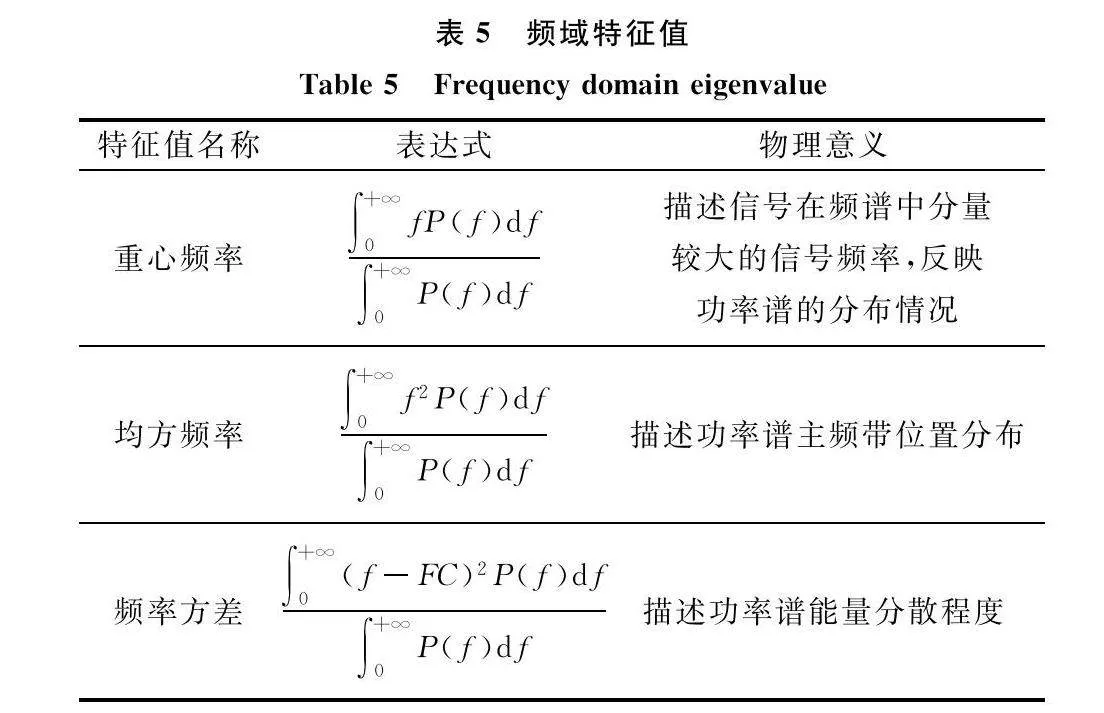
2.3 頻域統計特性
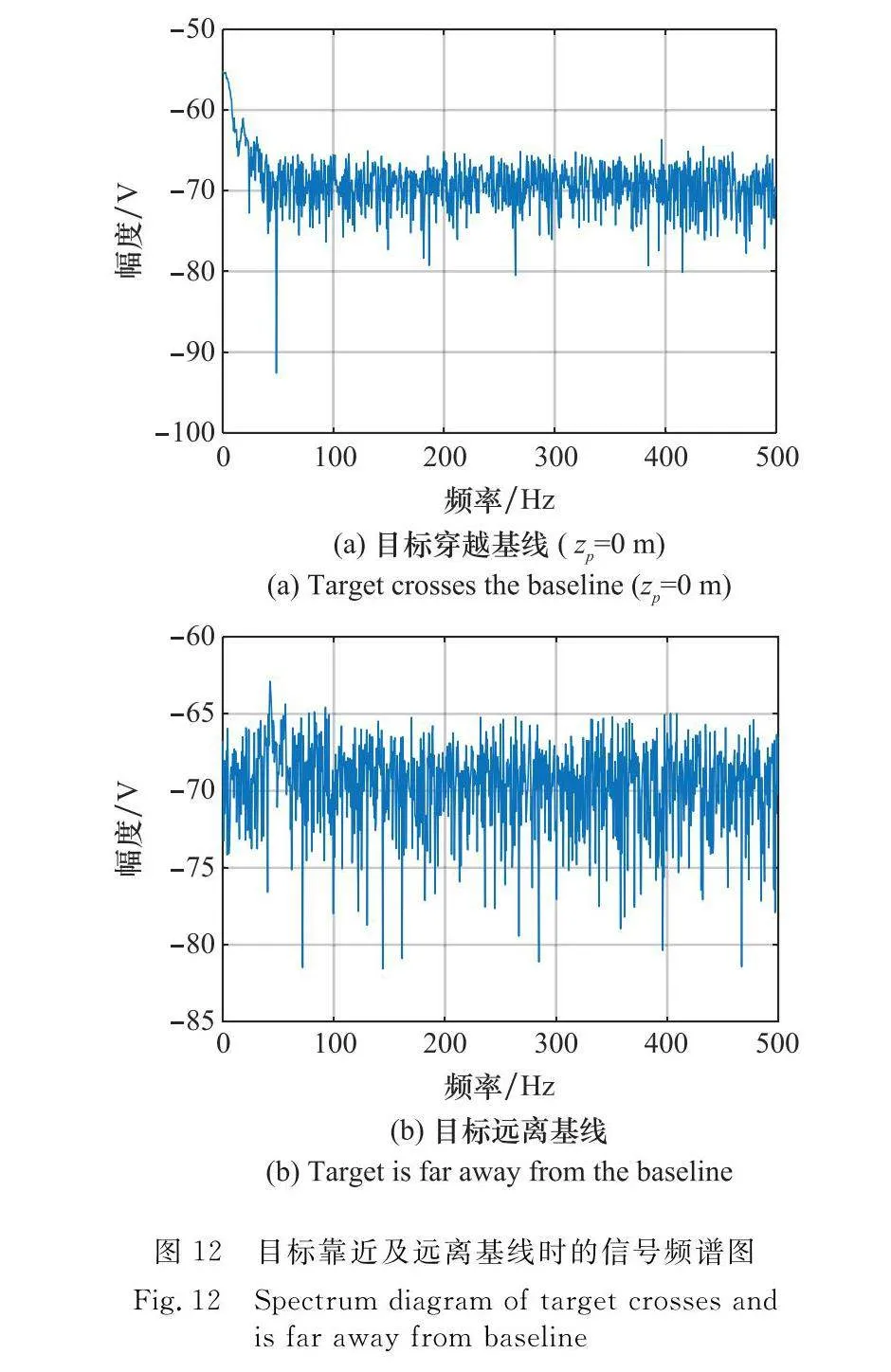
前向散射信號多普勒隨時間呈線性變化,目標越過基線時,多普勒頻率為零,且該特性在目標處于基線附近一定范圍內時都成立,故前向散射信號的頻率應在零頻附近。由于穿越方向不同,多普勒可能由正變負或由負變正,在目標逐漸靠近/遠離基線時其多普勒頻率隨時間呈線性變化,故通過連續截取接收信號段進行頻率分布分析,可找到穿越事件發生的信號段,該段信號幅度由RCS主峰調制,可實現信號能量最大化,提高檢測概率。由以上分析可知,表征信號頻率分布的特征值能較好地刻畫目標當前運動階段。
圖11和圖12給出了目標穿越及遠離基線時的時頻圖及頻譜圖,仿真參數同表2。當目標遠離基線運動時,設置運動時間為2~6 s(與基線距離為500~1 000 m),當目標穿越基線時,設置運動時間為-2~2 s(與基線距離為-500~500 m)。
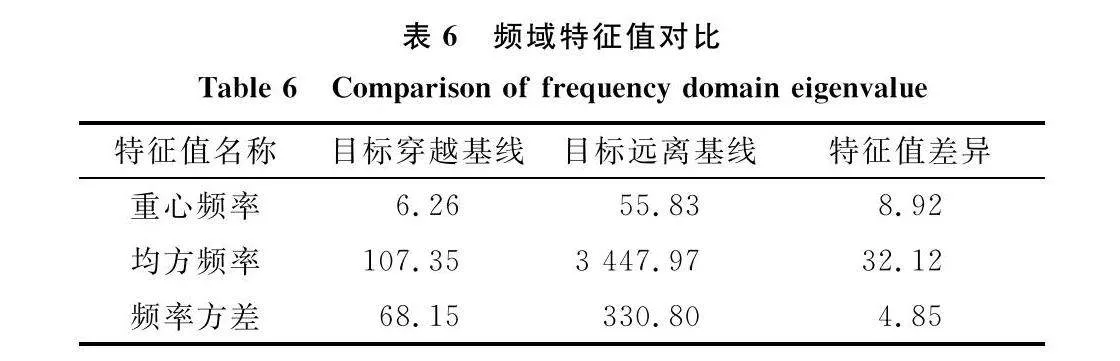
信號的頻域分析是按照頻率觀察信號特征,一般來說,在頻域上觀察信號使得問題的分析更加深刻和簡潔。本文精選了3種頻域特征指標,如表5所示。其中,P(f)為信號功率譜,用于反映信號功率譜的分布情況。對于目標穿越及未穿越基線的情況,仿真計算結果如表6所示。穿越基線的目標散射信號頻域特征值比未穿越基線時小得多,特別是均方頻率,相差超過30倍,說明了利用該頻域特征值刻畫前向散射信號特性的有效性。當目標軌跡不關于基線對稱時,前向散射信號的頻域特征差異較大,這提供了一種尋找較優對稱信號的方法,以最大化信號能量。
3 仿真與分析
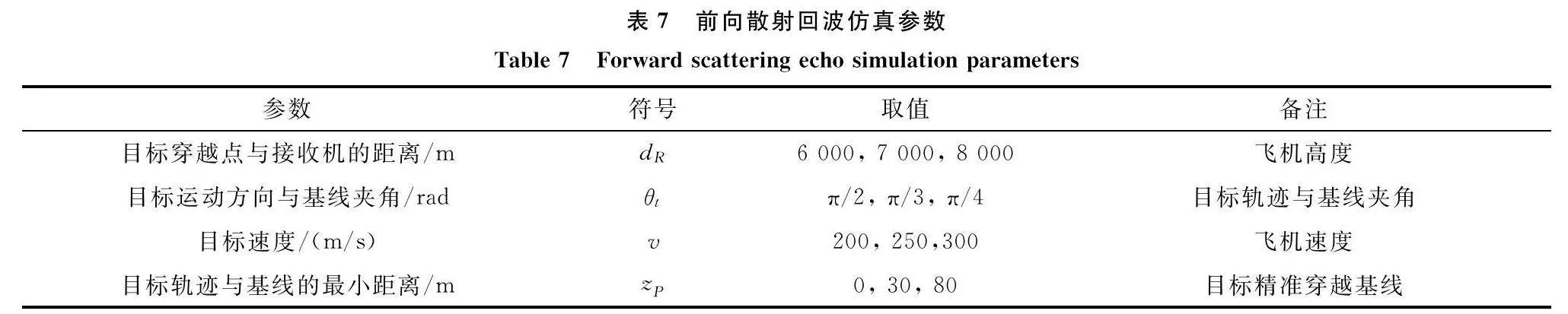
為了進一步研究目標穿越前向散射區的信號特性,下面結合等效平板目標結構和不同的參數,通過仿真來對比分析,前向散射信號仿真參數同表2,其他參數如表7所示,為便于分析信號特性,不添加噪聲。
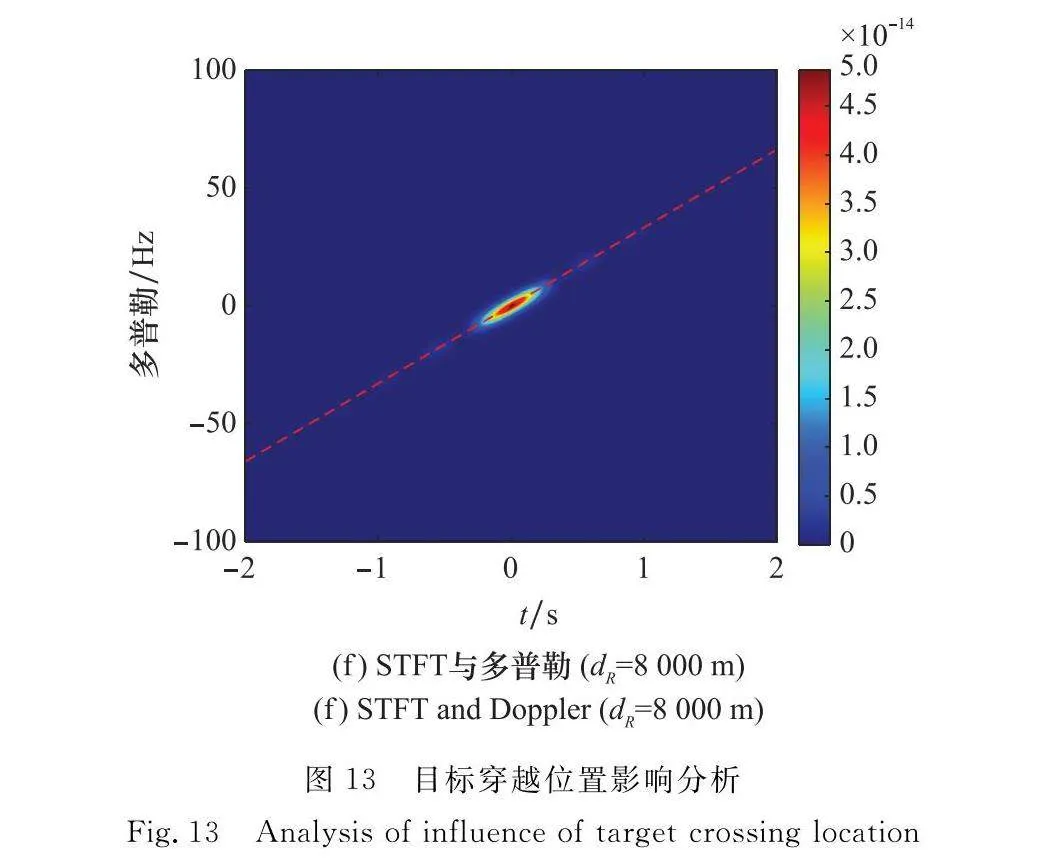
3.1 目標穿越位置影響分析
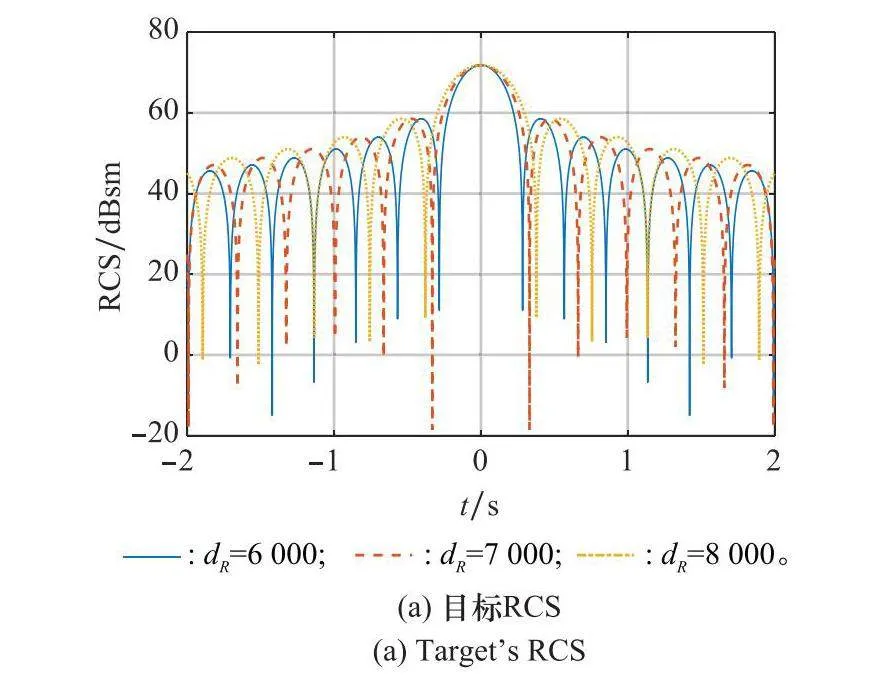
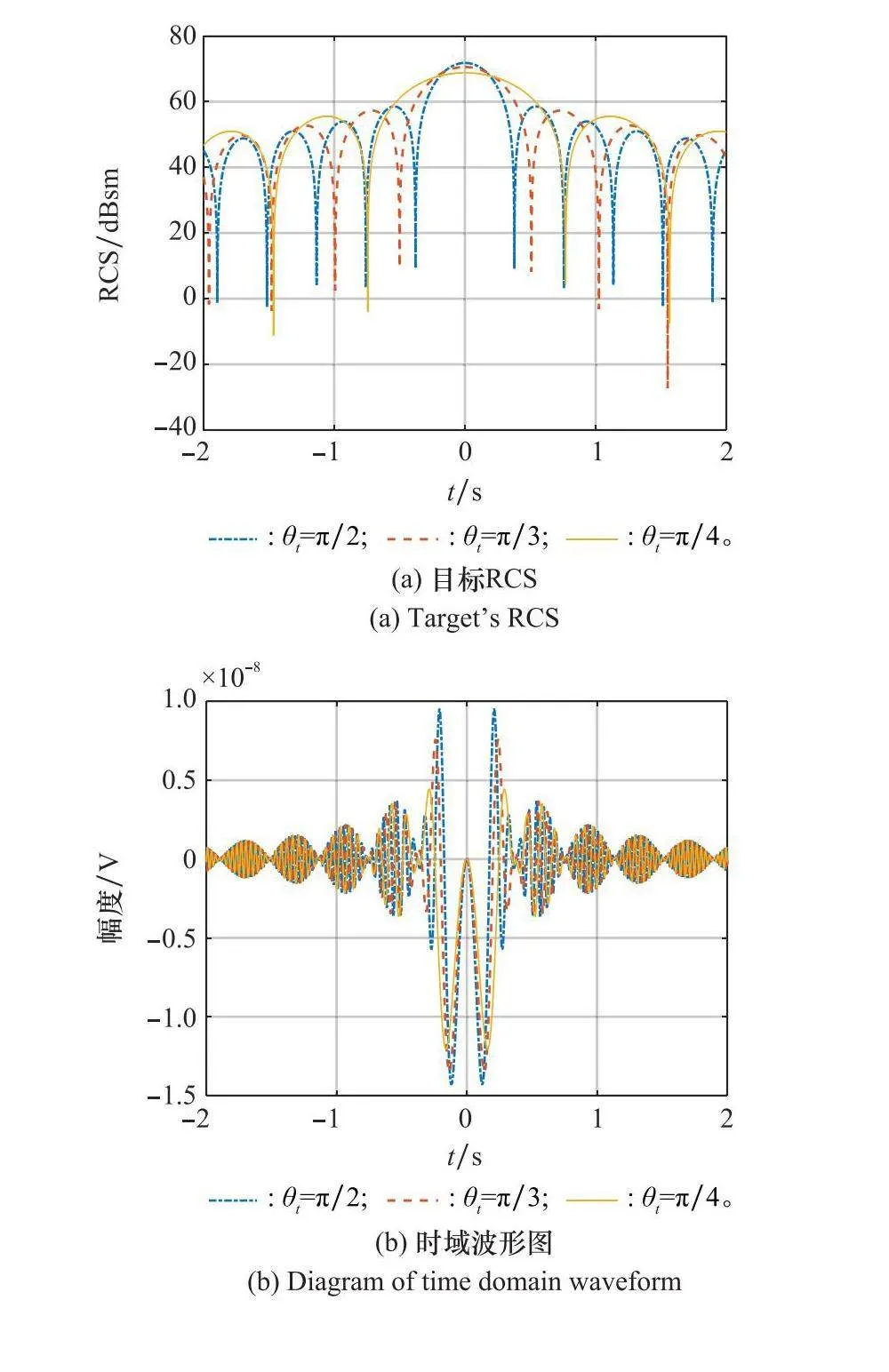
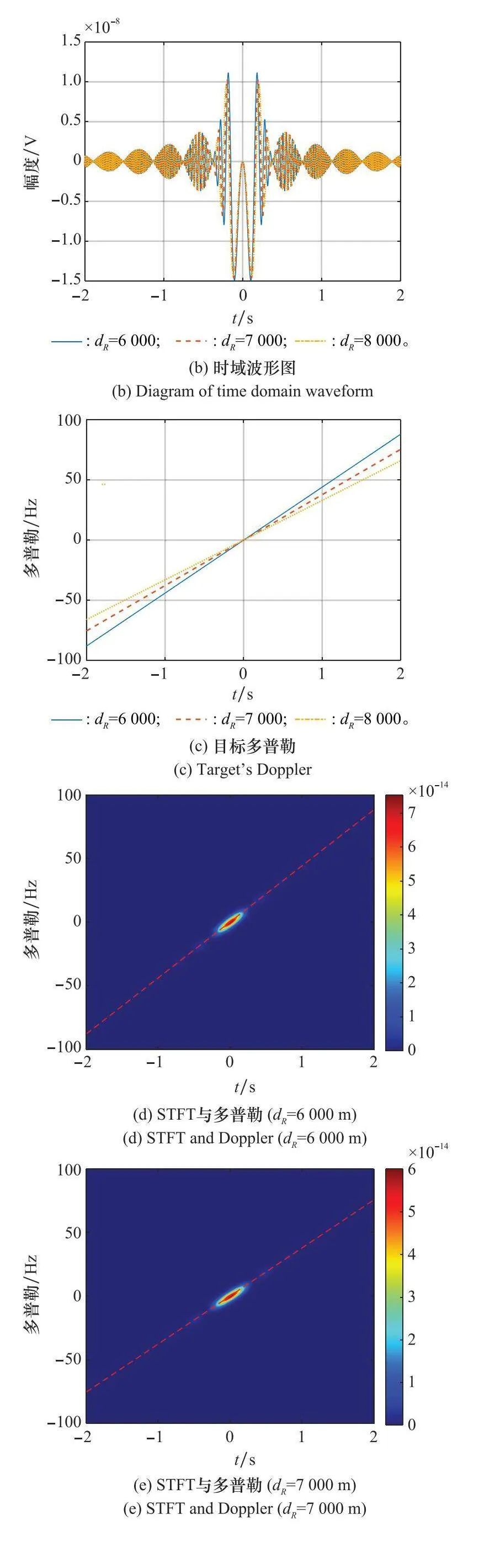
設置目標穿越點與接收機的距離dR分別為6 000 m, 7 000 m, 8 000 m,仿真結果如圖13所示。圖13(a)和圖13(b)表明當目標穿越點距離接收機越遠時,接收信號功率逐漸減小,故信號幅度逐漸減小,相同時刻目標位置對應的雙基地角變大,RCS的主峰區域逐漸增大。圖13(c)中的多普勒曲線通過對式(7)進行相位求導得到,多普勒變化率及其范圍隨dR的增大逐漸減小。信號模型中假定目標穿越基線時間為0時刻,故t=0時對應的多普勒為0。在實際測量中,時間由信號采樣時間確定,在后續研究中可利用多普勒為零這一特點來估計目標穿越基線的時刻。圖13(d)~圖13(f)為式(6)產生的前向散射信號短時傅里葉變換(short time Fourier transform, STFT) 結果,圖中紅色虛線為圖13(c)中的多普勒曲線,兩者的變化趨勢及范圍吻合得很好。同時可以看到,前向散射信號時頻分布能量主要集中在零頻附近,實際中檢測該信號有效的時間可能很短。
3.2 目標穿越速度影響分析
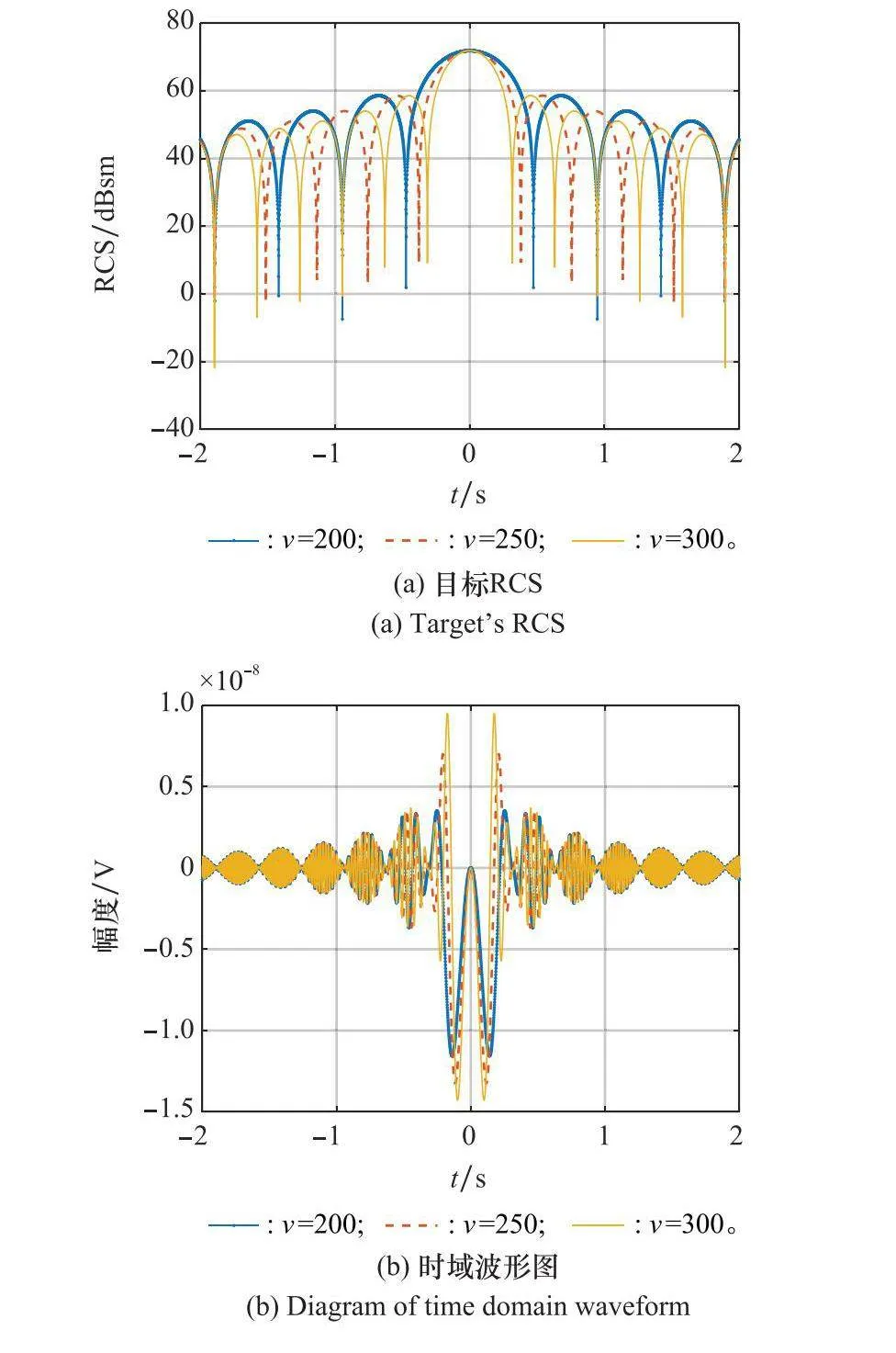
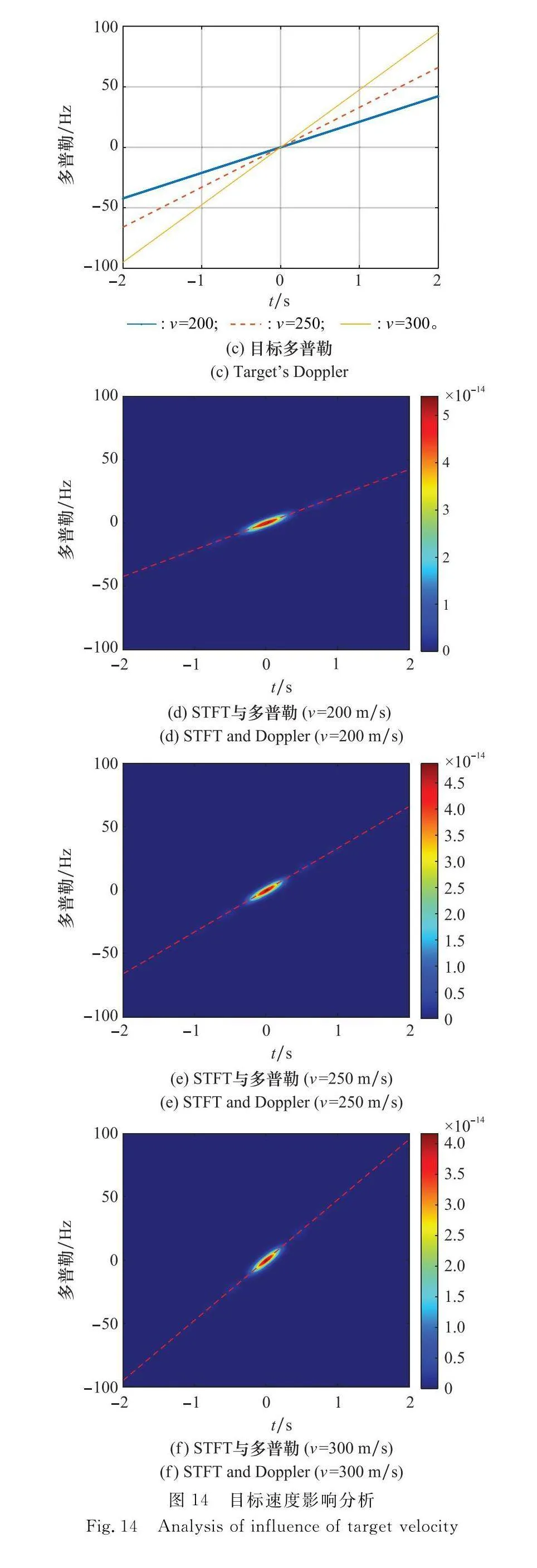
令目標速度分別為200 m/s、250 m/s、300 m/s,仿真結果如圖14所示。可以看到,隨著目標速度的增加,前向散射信號多普勒變化率及變化范圍逐漸增大。由于速度增大導致目標處于前向散射區的時間變短,故目標RCS的主峰寬度隨目標速度增大而逐漸減小,這也表現在信號時域波形的幅度調制中。
當雙基地角β=180°時, 3種速度下的目標RCS相等,信號接收功率相等,故各信號在0時刻周圍的幅度大致相等。由信號模型中的多普勒表達式可知,多普勒頻率與目標速度的平方呈正比,速度的改變對多普勒值的變化范圍影響較大。圖14(d)~圖14(f)所示的時頻圖也顯示了多普勒斜率隨目標速度增大而增大,在時間軸上的可觀測時間逐漸減小。
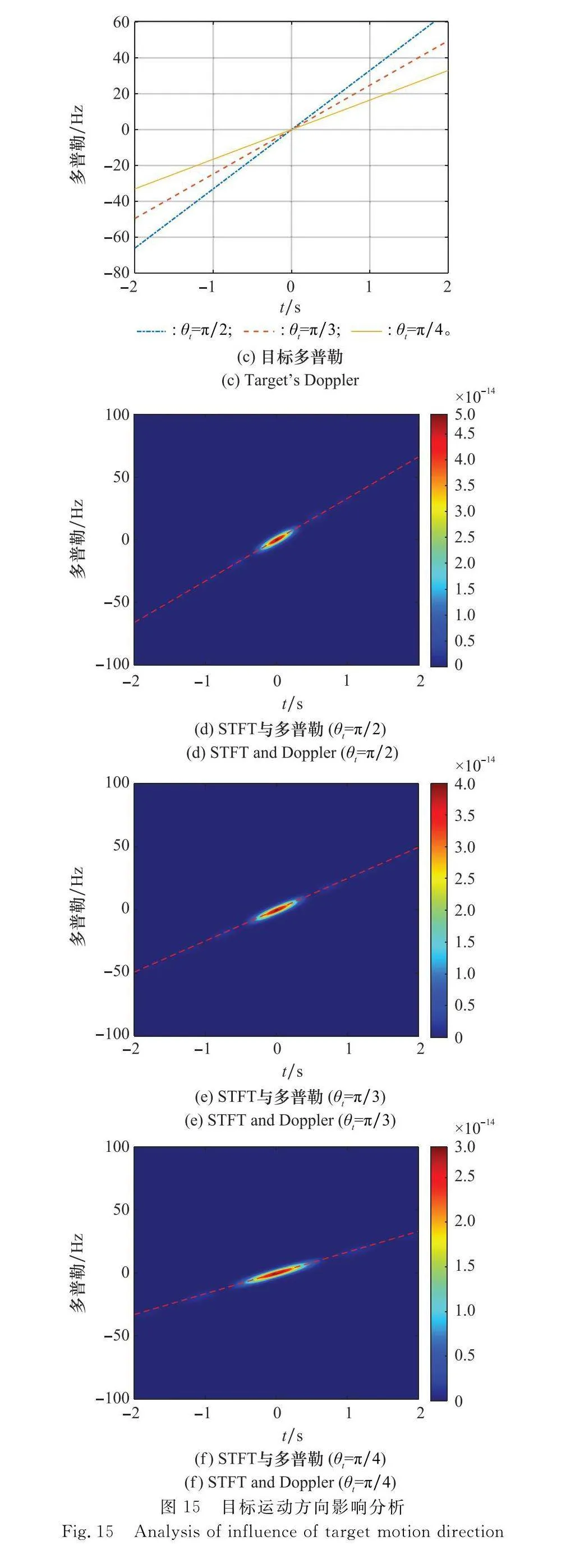
3.3 目標運動方向影響分析
修改目標運動方向,令目標運動軌跡與基線的夾角θt分別為π/4、π/3、π/2,仿真結果如圖15所示。當θt為π/4和π/3時,目標穿越基線時的信號應不具有對稱性,但這在圖15(b)中體現得不明顯,這是由于目標速度較大,使瞬時頻率變化較快。隨著目標運動方向與基線夾角的增大,目標多普勒值逐漸增大,多普勒變化范圍逐漸增大。當θt為π/4時,目標停留在前向散射區域的時間更長,所以目標RCS的主峰寬度相比其他兩種情況更大,而目標在衛星與接收機連線方向上的投影更小,故穿越基線時(t=0)的RCS最小,如圖15(a)所示。時頻圖中的高能量區域面積與目標停留在前向散射區的時間呈正比,即可觀測時間更長。
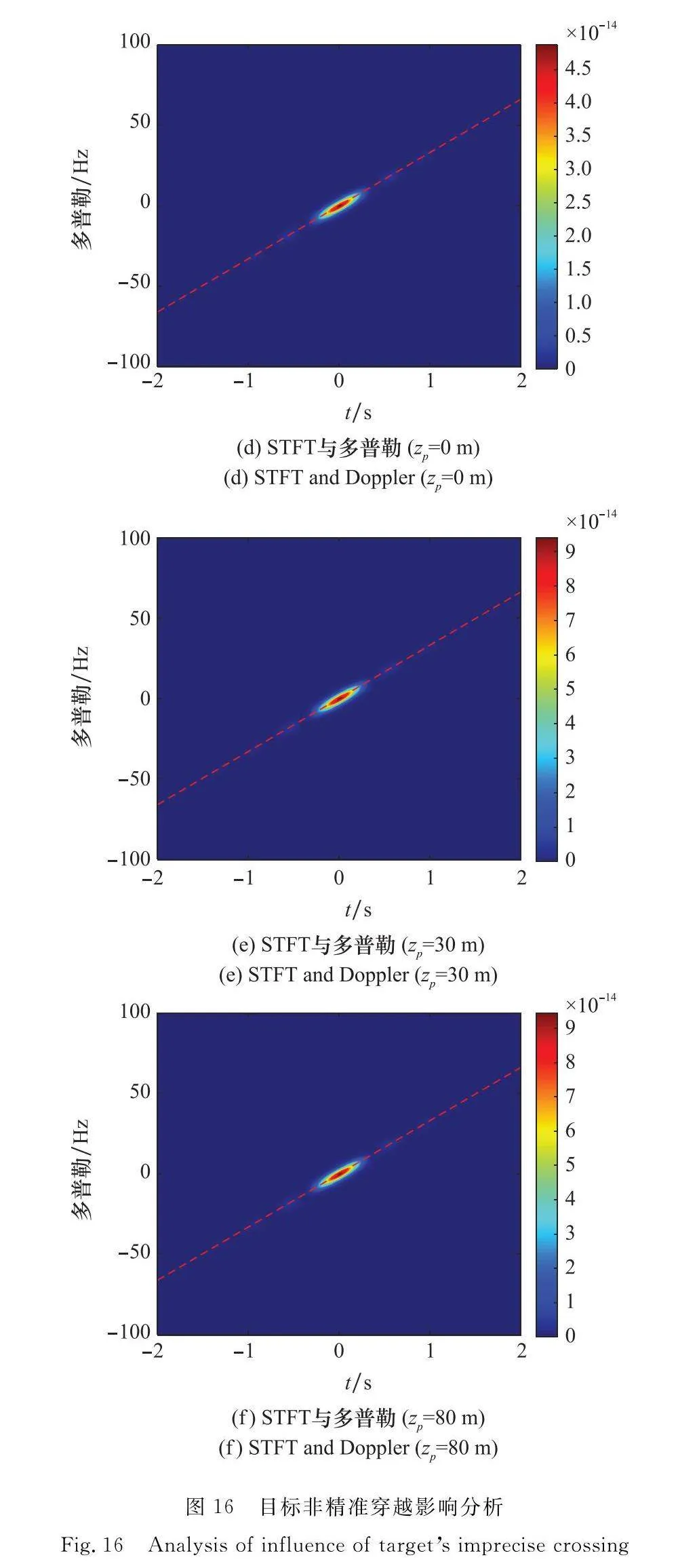
3.4 目標非精準穿越影響分析
假定zP分別取0 m,30 m和80 m,仿真結果如圖16所示。由圖16(a)和圖16(b)可知,zP的變化主要影響信號幅度及信號震蕩程度。當目標跨越基線并與基線距離較大時,目標輪廓在基線方向上的投影減小,故RCS減小,接收信號功率降低,給信號檢測帶來困難。由于多普勒近似表達式中沒有zP一項,故各信號的多普勒頻率相等,符合理論推導結論。
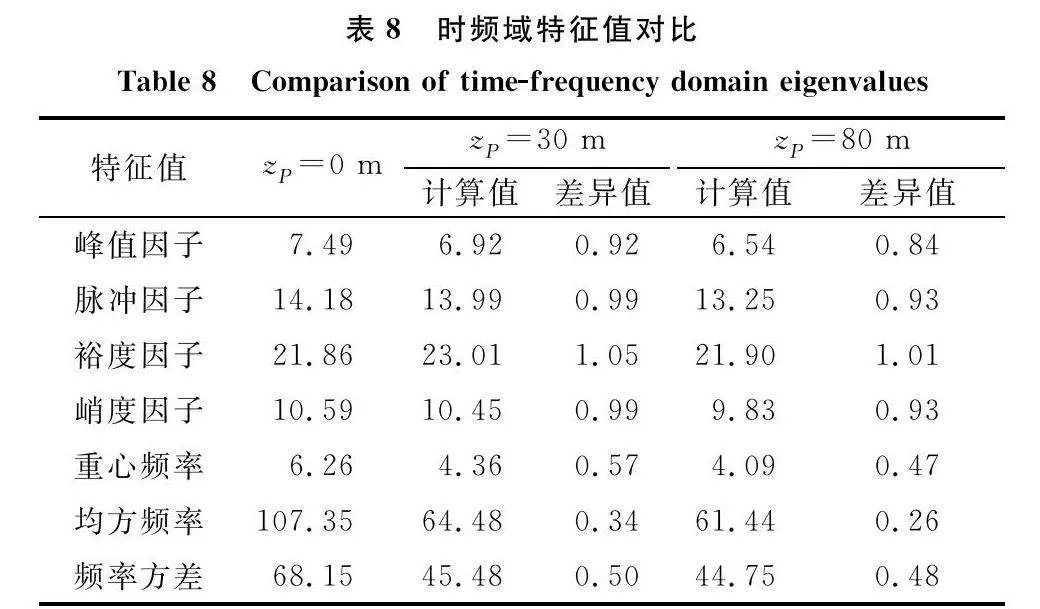
對于目標非精準穿越情況,計算不同zP下的散射信號時頻域特征值,計算結果如表8所示。隨著目標與基線距離的增大,各特征量的差異值逐漸增加。在實際應用中,受外界環境影響,特征差異值可能不具有單調性,可以考慮構造特征向量,提前測量飛機目標在不同條件下穿越基線時的前向散射信號,并計算時域、頻域特征值,構造數據庫,識別當前目標穿越基線時與基線的距離zP。
為獲得有利于信號分析研判的特征組合,可對以上特征值進行特征提取,得到代表性較強的特征,然后通過特征選取得到對信號識別最有利的有效特征。
4 結束語
本文在基于GNSS的FSR網的背景下,深入研究了FSR信號建模及回波特性。首先,分析了基于GNSS的FSR探測目標的最大雙基地角范圍和目標距離基線的最大值,為如何利用前向散射特性探測目標提供了參考。然后,基于前向散射信號模型,分析了信號時頻域統計特征,結論表明可采用滑動窗口截取接收信號段進行頻域分析,判斷當前是否發生穿越事件,進一步細化窗口,找到時頻分布曲線關于零頻對稱的信號段,以最大化信號能量。時域特征值刻畫了接收信號對應的目標距離基線的最小距離,該距離會影響目標位置估計精度,可用于后續參數估計的準確度判斷,或尋求一種誤差補償方法來獲取精度更高的目標位置估計值。最后,通過仿真分析了目標穿越位置、穿越速度、穿越方向對信號的影響,結果表明前向散射信號振蕩程度大且頻率接近零頻,通過時頻域統計參數能夠加以區分,可為前向散射信號識別提供參考。后續將在暗室中開展實測數據實驗,進一步驗證各種特征的有效性,并尋求可用的信號估計方法。
參考文獻
[1]FALCONI M T, LOMBARDO P, PASTINA D, et al. A closed-form model for long-and short-range forward scatter radar signals from rectangular conductive targets[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 56(2): 1370-1390.
[2]ARCANGELI A, BONGIOANNI C, USTALLI N, et al. Passive forward scatter radar based on satellite TV broadcast for air target detection: preliminary experimental results[C]∥Proc.of the IEEE Radar Conference, 2017: 1592-1596.
[3]DAUD N A M, ABD-RASHID N E, OTHMAN K A, et al. Analysis on radar cross section of different target specifications for forward scatter radar (FSR)[C]∥Proc.of the 4th International Conference on Digital Information and Communication Technology and its Applications, 2014: 353-356.
[4]MYAKINKOV A V, SMIRNOVA D M. The determination of coordinates of ground targets in multistatic forward-scattering radar[C]∥Proc.of the 8th European Radar Conference, 2011: 150-153.
[5]CLEMENTE C, SORAGHAN J J. GNSS-based passive bistatic radar for micro-Doppler analysis of helicopter rotor blades[J]. IEEE Trans.on Aerospace and Electronic Systems, 2014, 50(1): 491-500.
[6]CONTU M, DE-LUCA A, HRISTOV S, et al. Passive multifrequency forward-scatter radar measurements of airborne targets using broadcasting signals[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53(3): 1067-1087.
[7]陳新亮, 胡程, 曾濤. 一種基于前向散射雷達的車輛目標自動識別方法[J]. 中國科學: 信息科學, 2012, 42(11): 1471-1480.
CHEN X L, HU C, ZENG T. Automatic vehicle classification based on forward scattering radar[J]. Scientia Sinica Informationis, 2012, 42(11): 1471-1480.
[8]KANONA M E A. Ground target classification in forward scattering radar under noisy enviroment[D]. Khartoum: Future University, 2014.
[9]MOHAMMED E A K, MOHAMMED K H, ASHRAF G A. Target classification in forward scattering radar in noisy environment[J]. International Journal of Application or Innovation in Engineering amp; Management, 2014, 3(11): 188-192.
[10]KABAKCHIEV C, BEHAR V, GARVANOV I, et al. Detection, parametric imaging and classification of very small marine targets emerged in heavy sea clutter utilizing GPS-based forward scattering radar[C]∥Proc.of the IEEE International Conference on Acoustics, Speech and Signal Processing, 2014: 793-797.
[11]SUBERVIOLA I, MAYORDOMO I, MENDIZABAL J. Experimental results of air target detection with a GPS forward-scattering radar[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 9(1): 47-51.
[12]WACHTL S, KOCH V, SCHMIDT L P. Global navigation satellite systems in passive surveillance applications[C]∥Proc.of the Tyrrhenian International Workshop on Digital Communications-Enhanced Surveillance of Aircraft and Vehicles, 2014: 135-140.
[13]LIU C J, HU C, ZENG T, et al. Signal modeling and experimental verification in GNSS forward scatter radar[C]∥Proc.of the 17th International Radar Symposium, 2016.
[14]趙曉彤, 郭琨毅, 盛新慶, 等. 前向雷達目標回波成分與特性分析[J]. 系統工程與電子技術, 2016, 38(11): 2523-2529.
ZHAO X T, GUO K Y, SHENG X Q, et al. Characteristics analysis on forward scattering radar echoes[J]. Systems Engineering and Electronics, 2016, 38(11): 2523-2529.
[15]HU C, ANTONIOU M, CHERNIAKOV M, et al. Quasi-optimal signal processing in ground forward scattering radar[C]∥Proc.of the IEEE Radar Conference, 2008.
[16]LONG T, HU C, MIKHAIL C. Ground moving target signal model and power calculation in forward scattering micro radar[J]. Science China: Information Sciences, 2009, 52(9): 1704-1714.
[17]ZENG T, HU C, CHERNIAKOV M, et al. Joint parameter estimation and Cramer-Rao bound analysis in ground-based forward scatter radar[J]. EURASIP Journal on Advances in Signal Processing, 2012, 2012: 80.
[18]HU C, SIZOV V, ANTONIOU M, et al. Optimal signal processing in ground-based forward scatter micro radars[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48(4): 3006-3026.
[19]GASHINOVA M, DANIEL L, SIZOV V, et al. Phenomenology of Doppler forward scatter radar for surface targets observation[J]. IET Radar, Sonar amp; Navigation, 2013, 7(4): 422-432.
[20]CHERNIAKOV M, ABDULLAH R S A R, JANCOVIC P, et al. Automatic ground target classification using forward scattering radar[J]. IEE Proceedings-Radar, Sonar and Navigation, 2006, 153(5): 427-437.
[21]COLONE F, MARTELLI T, LOMBARDO P. Quasi-monostatic versus near forward scatter geometry in Wifi-based passive radar sensors[J]. IEEE Sensors Journal, 2017, 17(15): 4757-4772.
[22]HU C, LIU C J, WANG R, et al. Detection and SISAR imaging of aircrafts using GNSS forward scatter radar: signal mo-deling and experimental validation[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53(4): 2077-2093.
[23]LIU C J, HU C, WANG R, et al. GNSS forward scatter radar detection: signal processing and experiment[C]∥Proc.of the 18th International Radar Symposium, 2017.
[24]HU C, WANG L, LIU C. SISAR imaging method based on GNSS signal: theory and experimental results[C]∥Proc.of the CIE International Conference on Radar, 2016.
[25]徐志明, 王國玉, 鄭雨晴, 等. 前向散射雷達目標回波特性實驗[J]. 太赫茲科學與電子信息學報, 2022, 20(3): 195-199.
XU Z M, WANG G Y, ZHENG Y Q, et al. Experimental study on forward scattering echo characteristics of radar targets[J]. Journal of Terahertz Science and Electronic Information Technology, 2022, 20(3): 195-199.
[26]WACHTL S, KOCH V, SCHMIDT L P. Multipath sensor based on GNSS for passive airborne surveillance[C]∥Proc.of the European Radar Conference, 2013: 255-258.
[27]鄭雨晴, 艾小鋒, 徐志明, 等. 基于穿越時刻的前向散射雷達網目標參數估計方法[J]. 系統工程與電子技術, 2023, 45(5): 1323-1332.
ZHENG Y Q, AI X F, XU Z M, et al. Parameters estimation of FSR net based on crossing times[J]. Systems Engineering and Electronics, 2023, 45(5): 1323-1332.
[28]AI X F, ZHENG Y Q, XU Z M, et al. Parameter estimation for uniformly accelerating moving target in the forward scatter radar network[J]. Remote Sensing, 2022, 14(4): 1006.
[29]USTALLI N, PASTINA D, LOMBARDO P. Target motion parameters estimation in forward scatter radar[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 56(1): 226-248.
[30]魯郁. 北斗/GPS雙模軟件接收機原理與實現技術[M]. 北京: 電子工業出版社, 2016: 384-386.
LU Y. The principle and realization technology of Beidou/GPS dual-mode software receiver[M]. Beijing: Publishing House of Electronics Industry, 2016: 384-386.
作者簡介
鄭雨晴(1998—),女,碩士研究生,主要研究方向為雙/多基地雷達目標探測與定位。
艾小鋒(1983—),男,副研究員,博士,主要研究方向為雙/多基地雷達、雷達電子戰建模與仿真。
徐志明(1995—),男,博士研究生,主要研究方向為雙基地雷達目標特性與特征提取。
趙 鋒(1978—),男,副教授,博士,主要研究方向為電子信息系統仿真建模評估。
肖順平(1964—),男,教授,博士,主要研究方向為雷達極化信息處理及應用、電子信息系統仿真建模評估。
楊 勇(1985—),男,教授,博士,主要研究方向為極化雷達目標檢測與抗干擾。
