基于差分窗口生成式對抗網絡的空戰態勢評估
2024-11-26 00:00:00方偉張婷婷譚凱湯淼
系統工程與電子技術 2024年8期








摘 要: 針對飛機在空戰中采集的飛行參數數據成分復雜、標簽存在缺失等問題,提出一種基于生成式對抗網絡(generative adversarial network,GAN)的半監督空戰態勢評估模型。首先根據各要素權重提取空戰數據的主要影響因子,隨后進行差分化和窗口化處理,利用差分方法將態勢信息相對化為一維特征向量,窗口化信息生成反映兩架載機態勢信息的特征矩陣,并送入網絡進行半監督訓練。仿真結果表明,該模型在樣本標簽缺失的情況下具有良好的態勢分析效果,對于4種態勢的識別準確率達90.91%。
關鍵詞: 態勢評估; 半監督學習; 差分窗口; 生成式對抗網絡
中圖分類號: E 91
文獻標志碼: A
DOI:10.12305/j.issn.1001-506X.2024.08.21
Air combat situation assessment based on differential window
generative adversarial network
FANG Wei1,2, ZHANG Tingting1,*, TAN Kaiwen1, TANG Miao1
(1. Naval Aviation University, Yantai 264001, China; 2. National Experimental Teaching Center of
Marine Battlefield Information Perception and Fusion Technology, Yantai 264001, China)
Abstract: Aiming at the complex composition and missing tags of the flight reference data collected by the aircraft during the air combat, a semi-supervised air combat situation assessment model is proposed based on the generative adversarial network (GAN). Firstly, the main influencing factors of the air combat data are extracted according to the weights of each element, then the differencing and windowing processing are carried out. The situation information is relativeized into a one-dimensional feature vector using the differential method. The windowing information generates a feature matrix reflecting the situation information of the two carrier aircrafts, which is sent to the network for semi-supervised training. Simulation results show that the model has a good situation analysis effect in the case of sample labels missing, and the recognition accuracy of the four situations is 90.91%.
Keywords: situation assessment; semi-supervised learning; differential window; generative adversarial network (GAN)
0 引 言
隨著現代空戰的信息化發展,空、天、地一體化的情報信息收集系統日趨完善[1]。在收集到的海量數據信息中,既包含對空戰態勢影響較大的因素,也包含大量冗余的飛行數據,并且每項因素對空戰態勢的影響程度也不相同。如何從中篩選出有效信息、迅速評估態勢成為了飛行員面臨的主要問題[2-3]。因此,有效篩選信息、分配權重、提高空戰態勢評估的準確度是奪取空中戰場作戰優勢的重要手段,對現代空戰研究具有重要意義[4-7]。
目前,空戰態勢評估主要利用參量法[8]和非參量法[9]兩種方法對空戰過程中機載設備和數據鏈獲取的雙方作戰信息進行分析,參量法根據目標概率的分布特點建立網絡,在平均風險最小或盡最大可能完成任務的基礎上得到最佳評價結果,實現空戰態勢評估;非參量法通過定義優勢函數建立態勢評估模型,利用融合算法進行態勢評估。Xu等[10]在半監督樸素貝葉斯分類器的基礎上,提出了一種基于數據分類置信度的改進算法,通過該算法對空戰數據進行態勢分類。Ji等[11]利用云模型理論生成空戰態勢云圖,通過與評估云圖的比較,對空戰態勢進行評估,建立了改進的云殲擊機空戰態勢評估模型;Li等[12]基于動態貝葉斯網絡,以威脅事件作為輸入,對兩架戰斗機在超視距作戰過程中所面臨的威脅和優勢進行了仿真評估,建立了超視距空戰態勢評估模型。Zhao等[13]將無人機和對方的信息集中作為輸入,建立了4個屬性,提出了一種基于決策樹結構的空戰態勢評估方法。Xu等[14]在威脅評估樣本數據的基礎上,提出了一種基于極限學習機(extreme learning machine,ELM)神經網絡的威脅評估方法,能夠準確、快速地進行空戰目標威脅評估。Lu等[15]通過對遠程攻擊空戰過程的分析,得到了一組特征要素,以特征元素為節點,推導了攻擊概率的計算方法,解決了混合狀態動態貝葉斯網絡的推理問題。但現有方法從大量樣本中提取特征參數的能力一般,特征參數的選取直接影響了作戰態勢的評價標準,且態勢分析準確度受到參數權重計算的合理性制約[16]。
近年來,卷積神經網絡憑借著可以有效地從大量樣本中學習到相應特征、避免復雜的特征提取過程這一優勢被廣泛應用,在計算機視覺、模式識別和自然語言處理(natural language processing,NLP)等方面都展現出良好的效果[17]。但特征的學習過程依賴大量的標記樣本,在實際作戰數據采集過程中,受電子干擾、機載設備采集能力以及噪聲干擾等因素影響,數據集標簽存在缺失,這限制了監督神經網絡的訓練,也在一定程度上降低了網絡的擬合能力。
基于此,本文提出了一種基于半監督學習方法的生成式對抗網絡(generative adversarial network,GAN)空戰態勢評估模型。首先利用飛行模擬器模仿真實作戰場景進行訓練,采集兩架載機的飛行參數數據,根據各要素權重從中提取空戰態勢的主要影響因子;隨后對影響因子進行差分化和窗口化處理,利用兩架載機的相對威脅信息構造時序窗口化特征向量用于訓練,并將半監督學習引入GAN[18-22],采用參數尋優策略調整網絡的訓練,使網絡模型達到最佳評估效果,提高態勢分析的準確度[23-28]。
1 空戰態勢特征提取
1.1 態勢參數描述
在近距空戰過程中,機載設備和數據鏈系統能夠獲取大量的數據信息,并將信息實時傳輸到指揮所,對其進行處理后提供給指揮員和飛行員,為戰斗機的空中機動決策提供依據,但這些信息種類繁多,在計算過程中,并不需要所有的空戰態勢信息,不同的信息因素對空戰態勢的影響也有很大的不同。因此,在評估空戰態勢之前,需要對空戰數據進行篩選,選擇合適的方法確定主要影響因素。
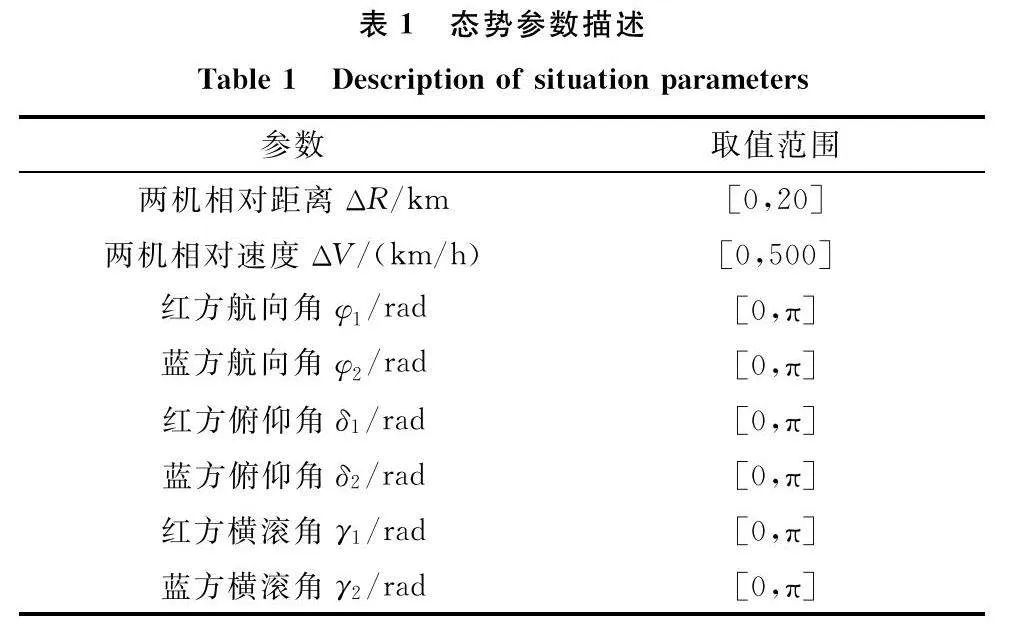
基于空戰數據建立空戰態勢信息表,綜合單機空戰情況下空空導彈發射條件,利用粗糙集理論對空戰態勢屬性指標進行約簡,并計算出相應的權重。最終選取兩機相對距離ΔR、相對速度ΔV、兩機航向角φ1和φ2、兩機俯仰角δ1和δ2、兩機橫滾角γ1和γ2這8個狀態信息來描述空戰態勢,結合空空導彈攻擊距離和攻擊條件,確定各參數取值范圍,同時將角度信息進行歸一化處理,詳細參數如表1所示。
1.2 態勢類型描述
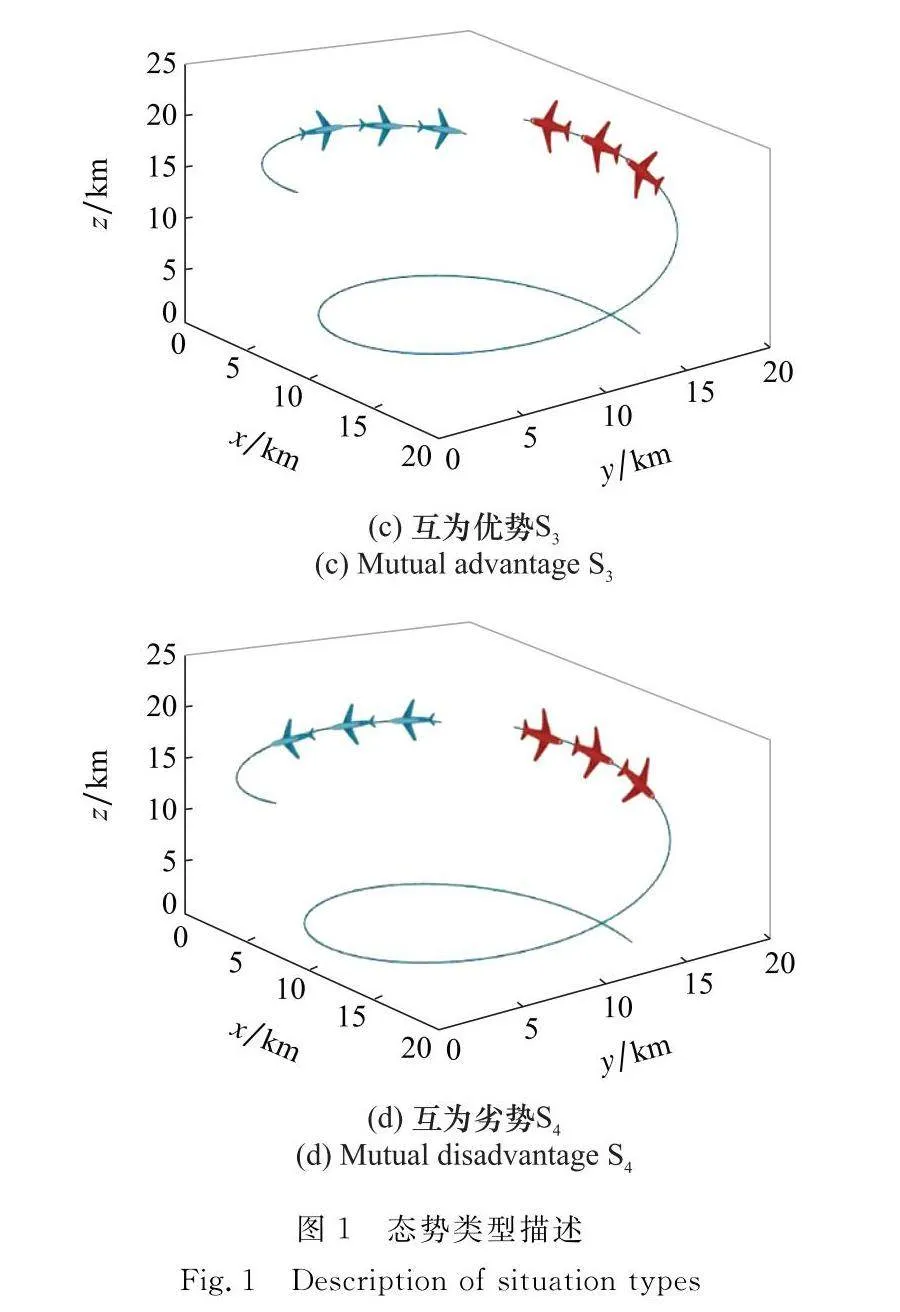
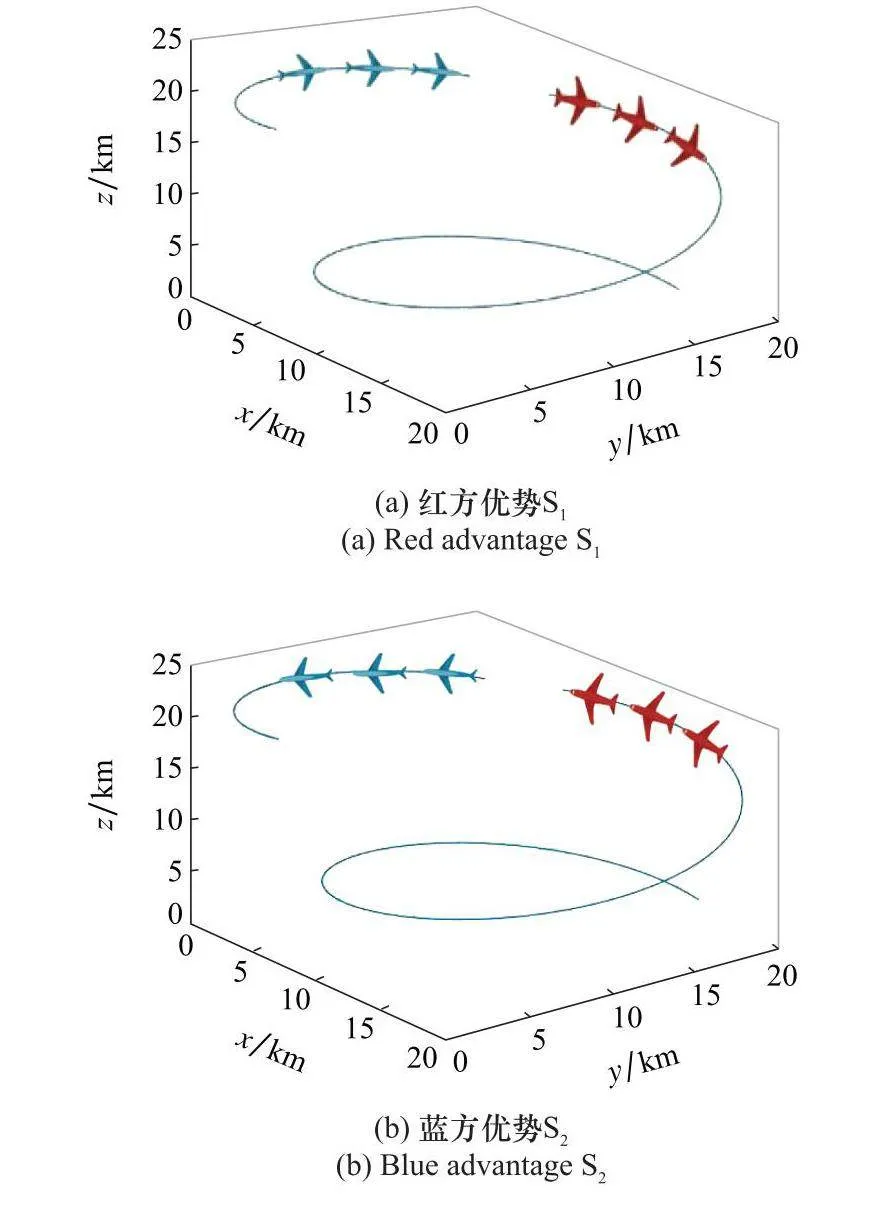
根據紅藍雙方的相對位置、相對速度、航向角、俯仰角和橫滾角等參數,將空戰態勢分為4種典型類型:即紅方優勢S1、藍方優勢S2、互為優勢S3、互為劣勢S4,各類態勢特征如圖1所示。
紅方優勢指兩機對抗時紅方飛機位于藍方飛機尾后區域,此時紅方飛機處于藍方飛機武器裝備不可攻擊范圍,而藍方飛機處于紅方飛機攻擊范圍之內,是對紅方極為有利的態勢,也是決定紅機能否奪取勝利的關鍵時刻。
藍方優勢指兩機對抗時藍方飛機位于紅方飛機尾后區域,此時藍方飛機處于紅方飛機武器裝備不可攻擊范圍,而紅方飛機處于藍方飛機攻擊范圍之內,是對紅方極為不利的態勢,紅機要靈活應變,迅速轉變態勢情況,避免遭到藍方攻擊或失去戰場控制權。
與上述兩種形勢不同,當兩機相背飛行,皆位于對方尾后區域,且不在對方武器裝備攻擊范圍之內。兩機相對距離逐漸增加時,稱為互為優勢,此時兩機皆不具備攻擊條件,紅機應迅速做出決策,爭取優先占據有利態勢,取得戰場控制權。
當兩機處于互為劣勢態勢時,兩架飛機相向飛行,均處于對方武器裝備攻擊范圍之內,此時兩機都較為危險,紅方飛機應盡快調整航向,逃出藍方攻擊范圍并盡力保持紅方優勢,奪取戰場攻擊主動權。
2 基于差分窗口GAN的分類模型構建
在監督學習中,通常最小化類標簽的交叉熵,并預測概率,以優化參數。但實際作戰應用中,往往由于客觀因素導致數據在采集過程中丟失標簽,為了彌補類標簽樣本不足的缺陷,本文使用來自4種態勢的數據來訓練神經網絡,其中既包含標簽數據,也包含無標簽數據。
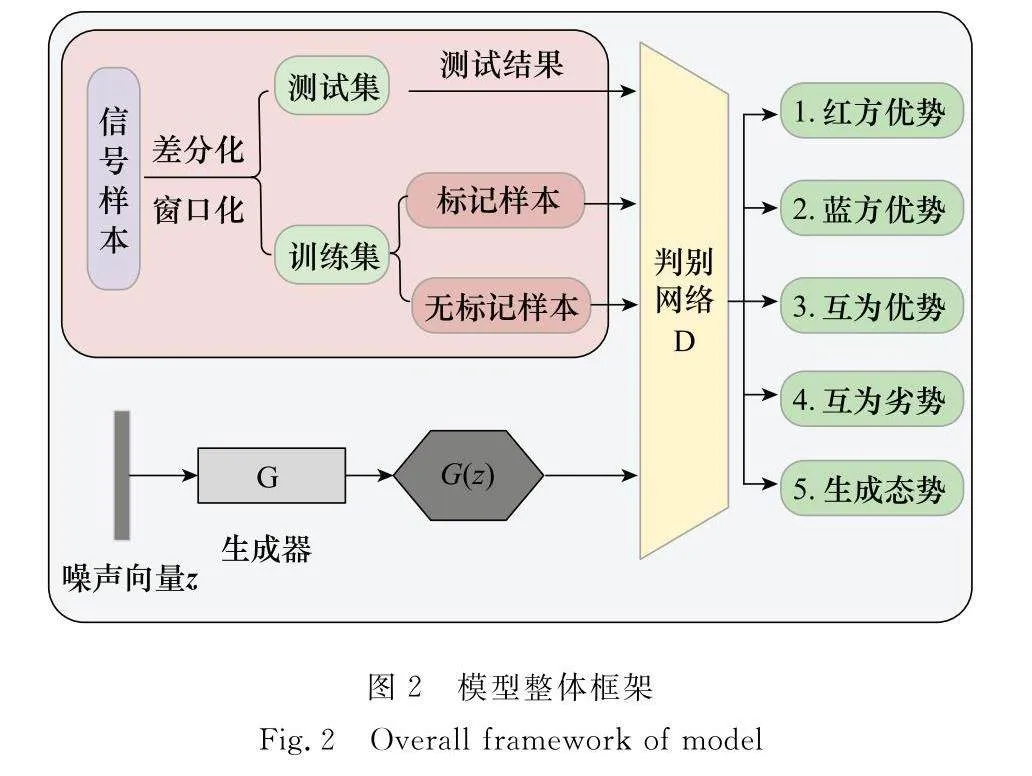
在網絡的訓練過程中,鑒別器D的無監督部分用來區分真實數據和生成數據,監督部分則將真實數據劃分為4種態勢,使用鑒別器D指導生成器G的訓練。對于半監督學習,在鑒別器D的輸出中加入K個維度,K表示數據集的類數,并將輸出劃分為5類,即紅方優勢、藍方優勢、互為優勢、互為劣勢和生成態勢。訓練結束后,保存鑒別器D的監督部分,對測試集進行驗證,模型的整體框架如圖2所示。
2.1 數據預處理
由于空戰數據是具有一定趨勢的線性時間序列數據,通過差分的方式可以消除一些波動干擾,使數據趨于平穩,同時將態勢信息相對化為一維特征向量,將態勢評估問題轉化為利用卷積神經網絡提取相對參數特征,形成特征圖。隨后將相對信息窗口化,使其轉化為特征矩陣,提高網絡運算速率,并將其歸一化后送入網絡進行訓練。
2.2 半監督學習
半監督學習是研究計算機和自然系統在有標簽和無標簽數據存在的情況下如何學習的一種學習方式,介于無監督學習和有監督學習之間,其目標是了解有標簽和無標簽數據的組合如何改變學習行為,并將這種組合進行設計應用。
在實際應用中,半監督學習是解決標簽數據稀缺的一種方法。由于在許多實驗和任務中,含標簽的數據往往是極度稀缺的,這些標簽可能很難獲得,因此需要采用人為注釋、特殊設備標記或實驗的方式獲取。任務中存在大量容易獲取的無標簽數據,傳統的監督學習方法不能使用無標記數據訓練分類器,然而半監督學習可以利用有標簽和無標簽的數據來實現比監督學習更好的性能。從另一個角度來看,半監督學習在達到與監督學習相同性能水平的前提下,需要更少的含標簽數據,這減少了對無標簽數據的注釋工作,從而降低了成本,使得無標簽數據使用率大大提高。
在實際單機近距空戰過程中,大數據量的對抗信息也帶來了數據標簽缺失的缺點,而半監督學習彌補了這一缺點,提高了單機對抗數據信息的利用率。
2.3 網絡結構
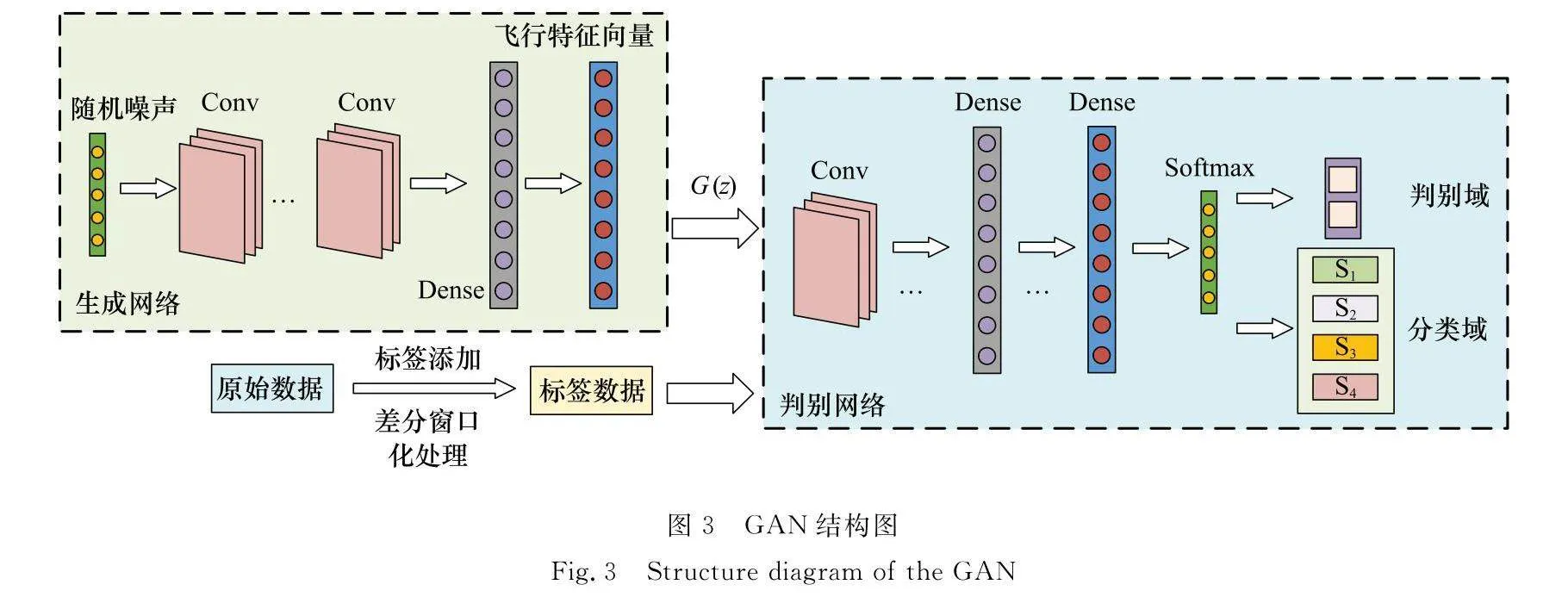
在載機的近距離博弈過程中,所產生的飛行數據能夠很好地表達雙方所處態勢。本文將半監督學習引入GAN,構造一種面向態勢標簽缺失情況下的態勢分析方法。結合粗糙集理論和空空導彈發射條件,在保持分類能力不變的前提下,通過知識約簡,篩選出對作戰態勢影響較大的數據信息;利用差分方法,將態勢信息相對化為一維特征向量,并將得到的信息窗口化為能夠反映兩架載機態勢信息的特征矩陣,方便輸入網絡,最終將其送入網絡對作戰數據信息進行訓練,實現空戰態勢的評估,GAN結構框架如圖3所示。
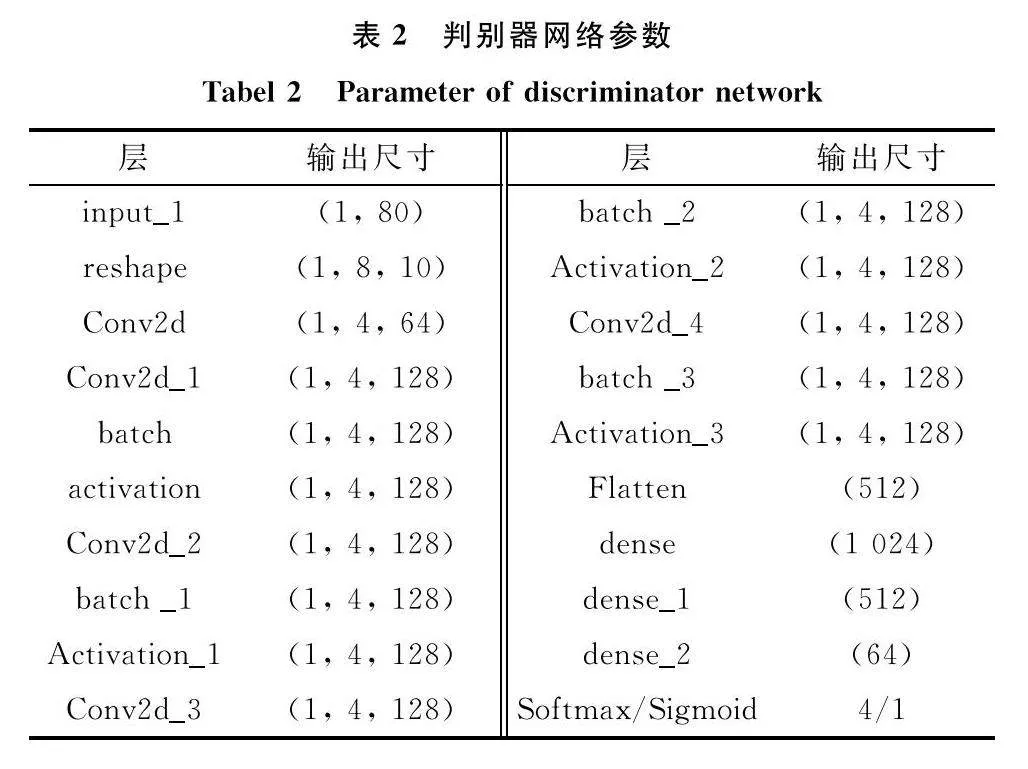
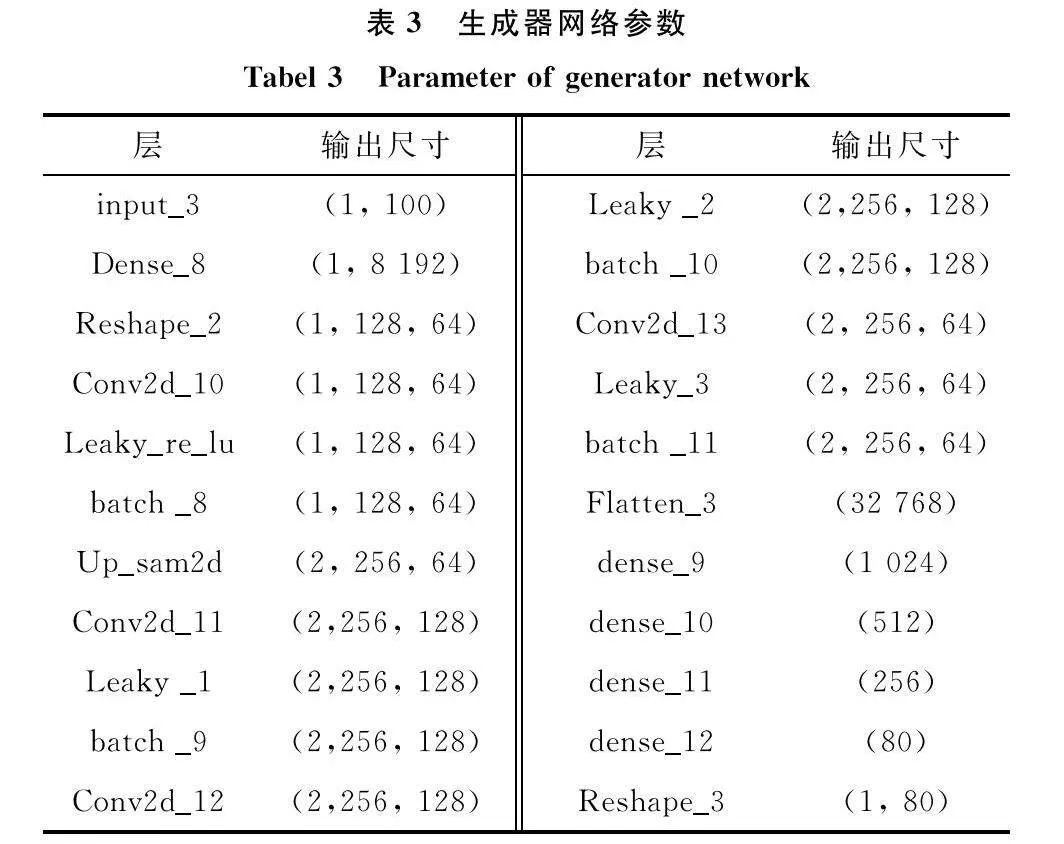
利用卷積神經網絡分別搭建生成器和判別器,并將采集到的信號樣本隨機分為訓練集和測試集,再按照一定的比例將訓練集分為標記樣本和無標記樣本,此時定義標記樣本占整個訓練集樣本的百分比為標簽比;生成器將噪聲向量z經過卷積后生成樣本G(z),利用G(z)欺騙判別器。此時,判別器接收3類樣本并進行訓練。訓練結束后保存模型,并將測試集輸入判別網絡進行離線測試,驗證模型評估效果,衡量模型性能的指標為混淆矩陣和識別準確率。在半監督網絡中,判別器通過權重共享實現特征提取,即監督部分和無監督部分進行權重共享,輸出部分將判別器模型中的輸出層替換為Softmax分類器,此時網絡模型中無監督部分輸出層采用Sigmoid進行真假二進制分類,而監督部分利用Softmax分類器實現K類態勢的分類,判別器和生成器網絡參數分別如表2和表3所示。
2.4 損失函數設計
訓練生成器G的目的是產生欺騙鑒別器D的樣本,而生成器的輸出G(z)將作為鑒別器D的輸入。因此,希望最大化Dk+1(G(z)),表示G(z)被判定為真實樣本的概率。讓Dy≥k+1(G(z))表示鑒別器D的輸出的K+1維,當其輸入是生成的數據,訓練生成器的目標函數為
max LG=EPz(z)[log(1-Dy≥k+1(G(z)))](1)
式中:E(·)表示期望;對數底數的取值不影響計算結果,下同。為了使生成器生成的數據更接近真實數據,訓練生成器匹配數據中的多特征層鑒別器。令f(x)為鑒別器多特征層上的激活量,定義生成器的特征匹配損失為
min Lfm=EPdata(X)f(X)-EPz(z)f(G(z))22 (2)
因此,生成器的損失函數為
min V(G)=EPZ(z)[log(1-Dy≥K+1(G(z)))]+λ1EPdata(x)f(x)-EPZ(z)f(G(z))22(3)
式中:λ1為權重因子。判別器的目標函數由監督學習損失和無監督學習損失兩部分組成。對于無監督學習,判別器只需要判斷輸入數據的真假。在這部分中,不需要類標簽。因此,無監督學習的目標函數為
max V(D)unsup=EPdata(x)[logDy≥k+1(x)]+EPZ(z)[log(1-Dy≥k+1(G(z)))](4)
為了利用訓練數據的標簽,將監督學習的損失函數定義為交叉熵的形式,在本文中,類標簽被編碼為一個獨熱向量。令yi表示標簽的第i維,Di(x)表示鑒別器D輸入為真實數據時的輸出的第i維。因此,監督學習的目標函數為
max V(D)sup=EPdata(x,y)∑ki=1yilogDi(x)(5)
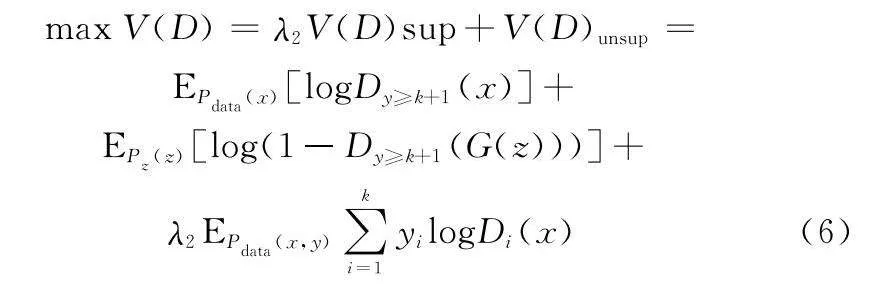
則判別器的總體目標函數定義為
max V(D)=λ2V(D)sup+V(D)unsup=EPdata(x)[logDy≥k+1(x)]+EPz(z)[log(1-Dy≥k+1(G(z)))]+λ2EPdata(x,y)∑ki=1yilogDi(x)(6)
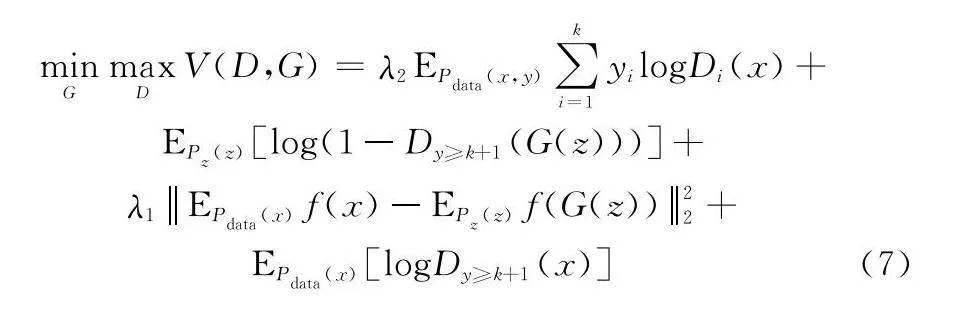
式中:λ2為權重因子,整個訓練過程式(3)和式(6)的組合表示為
minGmaxD V(D,G)=λ2EPdata(x,y)∑ki=1yilogDi(x)+EPz(z)[log(1-Dy≥k+1(G(z)))]+λ1EPdata(x)f(x)-EPz(z)f(G(z))22+EPdata(x)[logDy≥k+1(x)](7)
3 空戰數據仿真及分析
3.1 數據預處理
利用飛行模擬器模擬真實一對一近距離空戰場景,分別生成兩機雙方對抗數據信息,并提取主要特征因子,包括兩機經緯度(E1,N1)和(E2,N2)、高度H1和H2、速度V1和V2、兩機航向角φ1和φ2、俯仰角δ1和δ2、橫滾角γ1和γ2共14個變量,獲取6 160組數據作為訓練數據樣本。由于兩機在作戰過程中采集到的數據在時間上具有連續性,為了減少波動,保持數據穩定性,利用差分運算將兩機經緯高度轉化為相對位置變量,兩機速度轉化為相對速度變量,此時特征參數向量α包含兩機相對距離ΔR、相對速度Δv、兩機航向角φ1和φ2、兩機俯仰角δ1和δ2、兩機橫滾角γ1和γ2共8個參數,即
α=(ΔR,Δv,φ1,φ2,δ1,δ2,γ1,γ2)(8)
以此為輸入特征向量,并將樣本數據窗口化,每10個采樣點為一組,構造特征矩陣并輸入網絡模型,不斷調整參數,從而尋找最優參數設置。
3.2 仿真實驗
3.2.1 參數影響分析實驗
在整個網絡結構中,不同的參數設置會對網絡的評估能力產生影響,進而影響態勢評估的準確度,因此需要調整不同的參數進行實驗,分析各個參數的變化對網絡性能的影響,以此達到最佳評估效果。模型采用批量隨機梯度下降算法進行優化:
ωt+1=ωt-η1n∑x∈βΔl(x,ωt)(9)
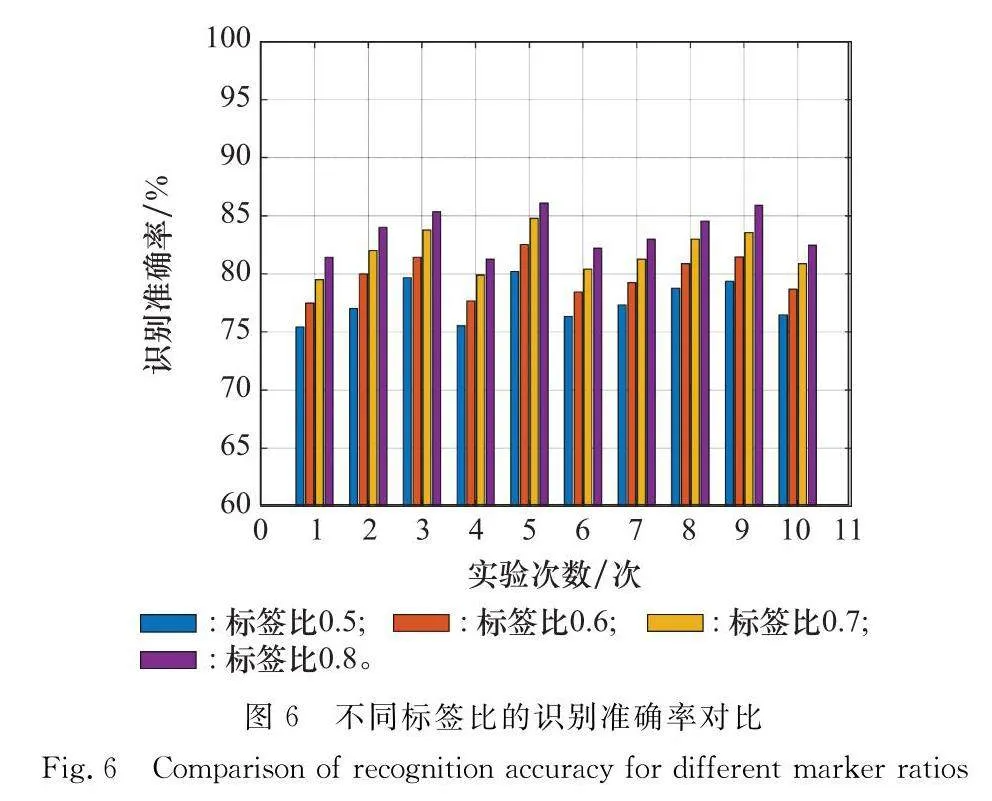
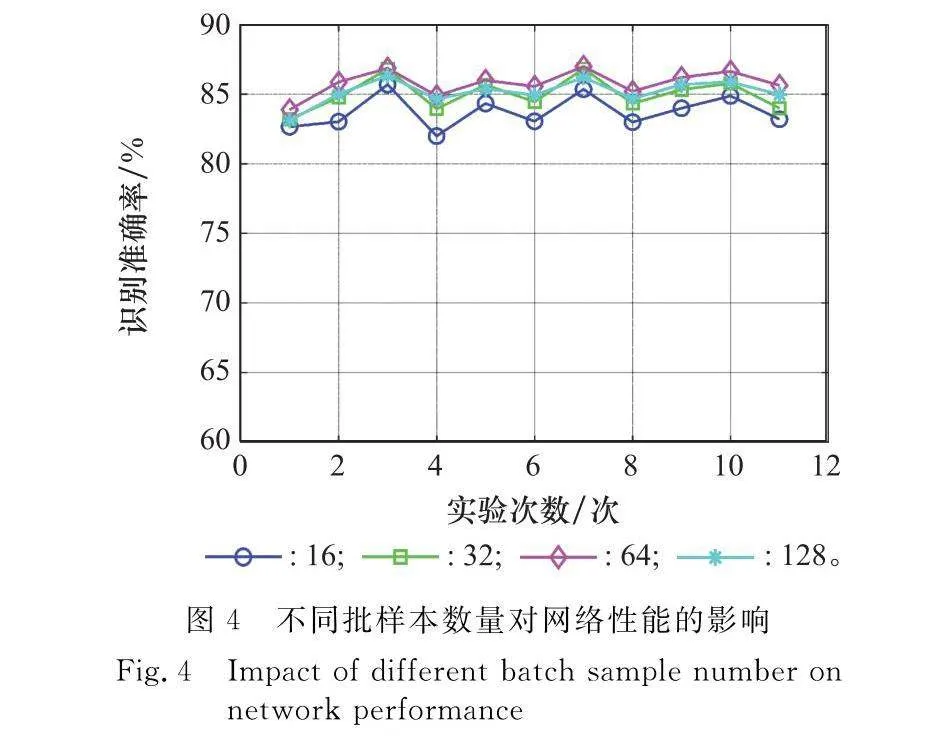
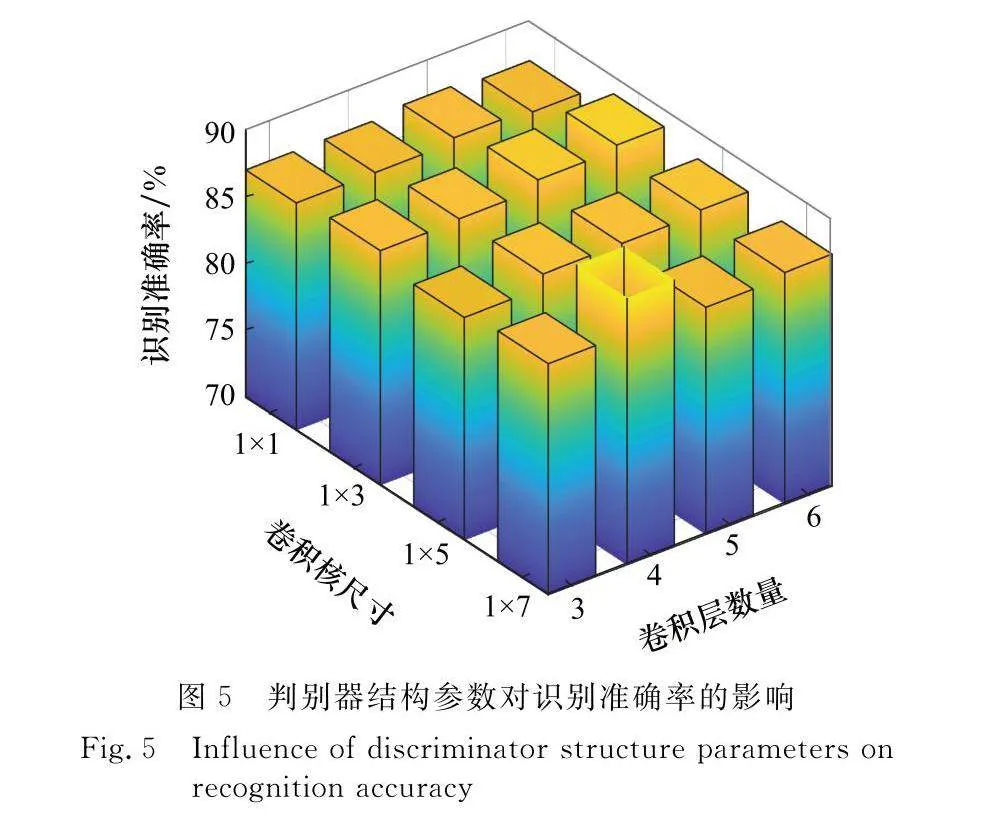
式中:n表示批量大小;η表示學習率;ωt表示權重的初始值;ωt+1表示更新后的權重值。除了梯度本身,批量大小和學習率直接決定了模型的權重更新,從優化本身來看,其是影響模型性能收斂最重要的參數,學習率直接影響模型的收斂狀態,批量大小則影響模型的泛化性能。實驗中主要考慮的影響參數有卷積核尺寸、卷積層數、迭代次數、標簽比、訓練樣本占總樣本比例和批樣本數量,衡量網絡性能的指標為識別準確率和損失函數。圖4為不同批樣本數量對網絡性能的影響,圖5為卷積層數和卷積核對網絡性能的影響,圖6為不同標簽比對網絡性能的影響。鑒于空間有限,實驗中不同參數設置所得識別準確率均為在參數相同情況下進行多次仿真實驗后取平均值的結果。
從圖4可以看出,隨著批樣本數量的增加,識別準確率逐漸升高,當批樣本數量為64時,準確率最高,達到最佳狀態后,準確率隨著批樣本數量的增加而降低。由此可知,在一定范圍內,增加批樣本數量有助于收斂的穩定性,但是隨著批樣本數量的增加,模型的性能會下降,分析原因為批樣本數量越大,內存利用率提高,大矩陣乘法的并行化效率提高,其確定的下降方向越準,引起的訓練震蕩越小。而過大的批樣本數量性能下降是因為訓練時間不夠長,在同樣的迭代次數下的參數更新變少了,訓練需要更長的迭代次數,因此識別準確率并非隨著批樣本數量的增加而線性提高。
從圖5可以看出,模型的識別準確率并沒有因卷積層數和卷積核的增加而升高或降低,這說明卷積層數和卷積核與識別準確率并不存在線性關系。仿真實驗結果表明,卷積層數過多時易產生過擬合,卷積層數過少時會由于欠擬合而導致準確率降低,在達到相同感受野的情況下,卷積核越小,所需要的參數和計算量越小。在本模型中,4層卷積層、卷積核為1×5時可達到最佳評估效果。
圖6展示了標簽比分別為0.5、0.6、0.7和0.8時網絡模型的識別準確率。通過對比可知,標簽比越大,識別準確率越高,即樣本中包含的標簽數據越多,態勢評估效果越好。
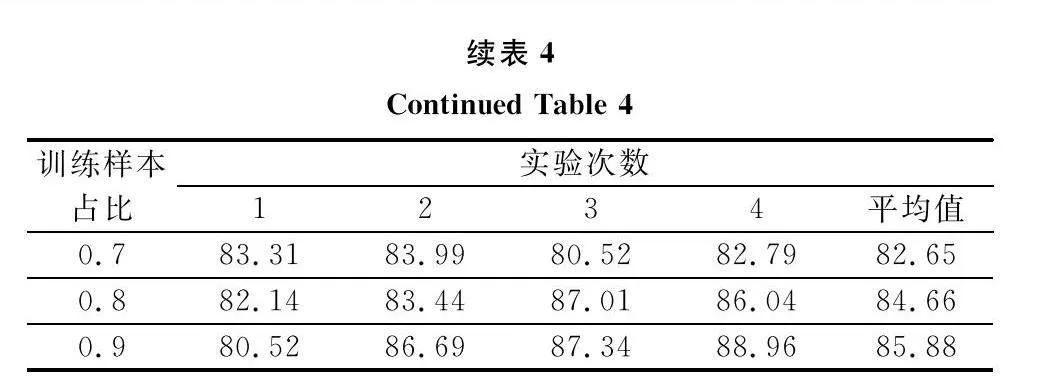
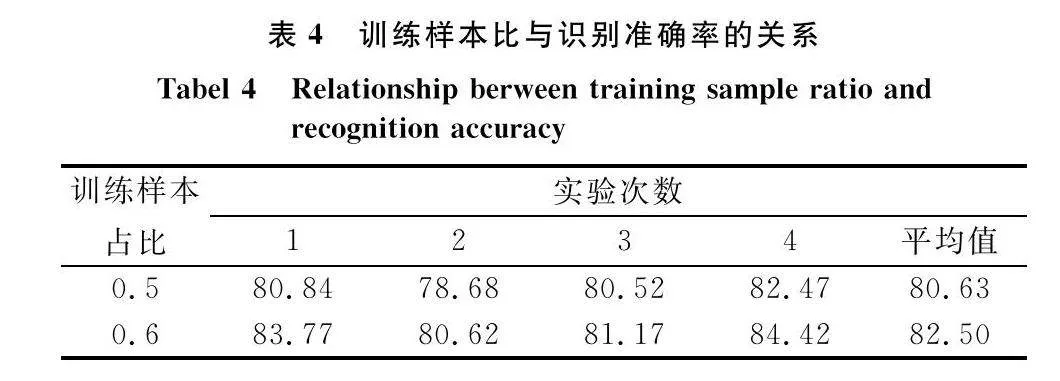
表4展示了訓練樣本占總樣本比例與模型識別準確率的關系。從表4可以看出,識別準確率與訓練樣本占比成正比關系,訓練樣本占總樣本比例越高,網絡識別準確率越高。這是由于GAN模型訓練難度較大,需要大量的樣本數據來支撐模型的訓練效果。當樣本數量一定時,訓練樣本占總樣本的比例越高,說明用于訓練模型的數據量越大,模型的訓練效果越好,由此得到的識別準確率也就越高。
3.2.2 最優參數分析實驗
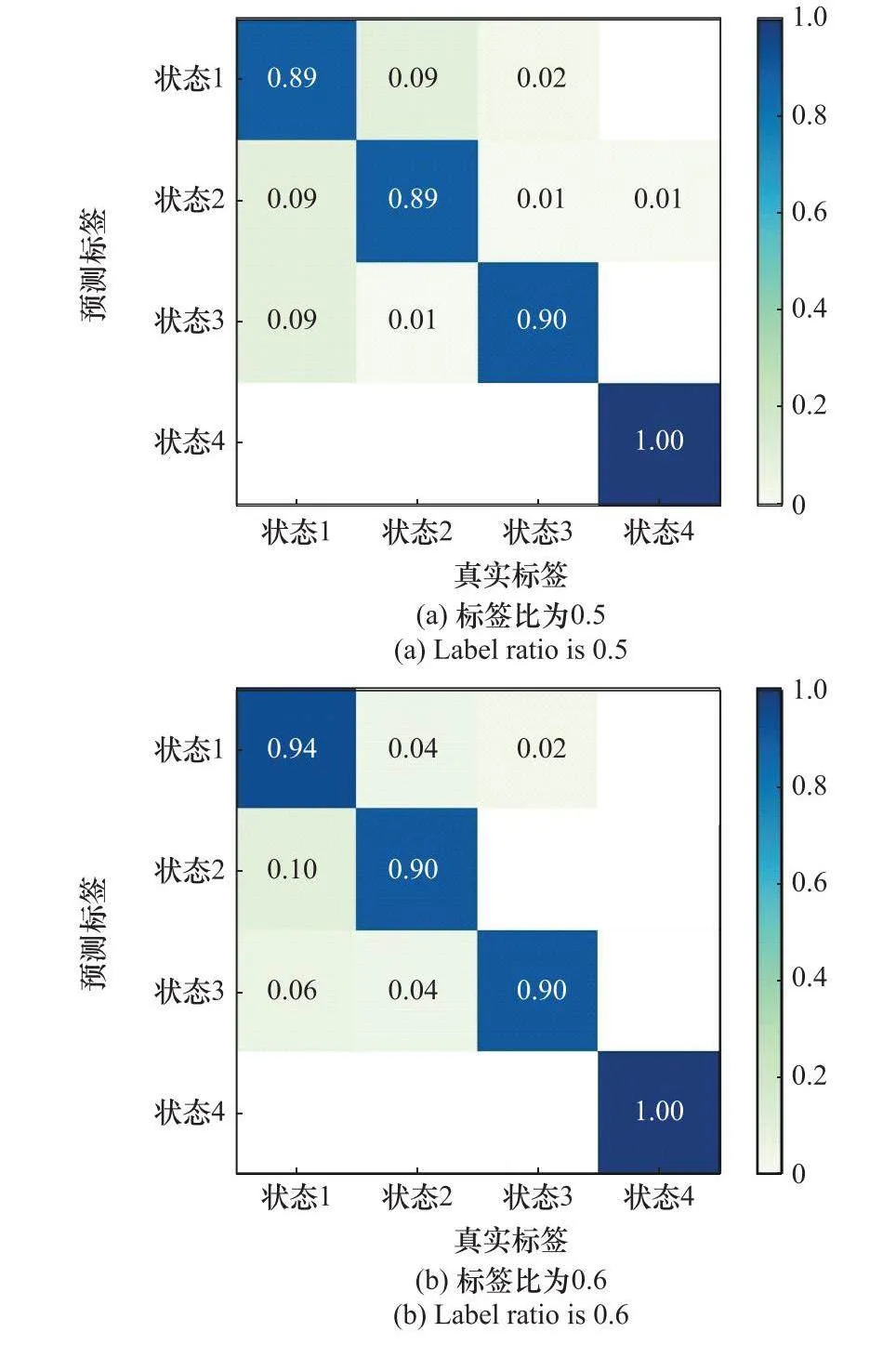
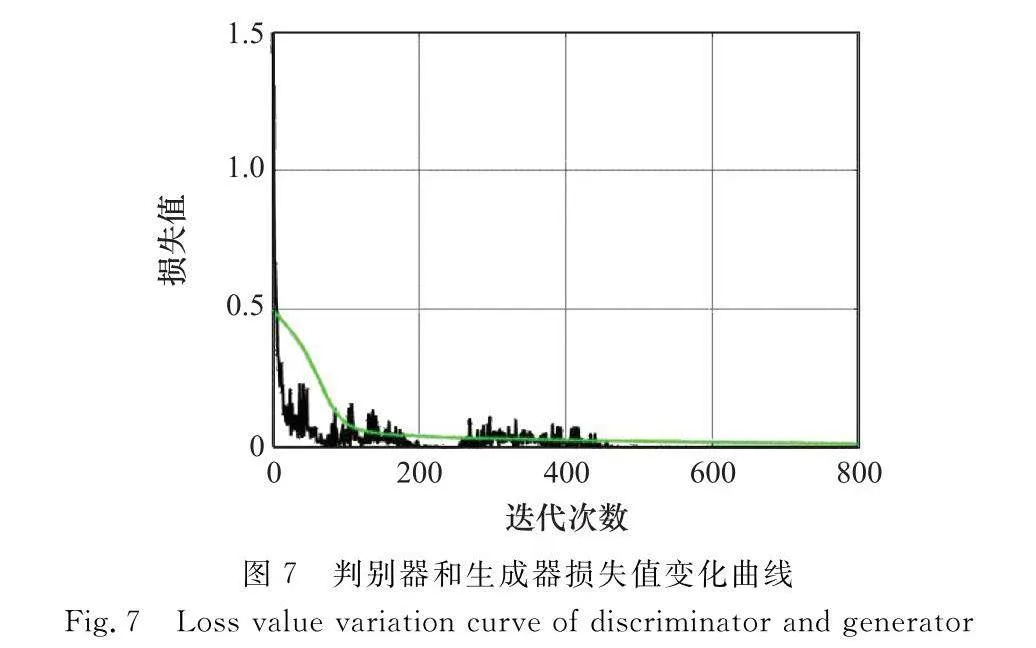
根據以上幾組實驗可以確定,模型最優參數的批樣本數量為64,迭代次數為800,卷積核為1×5,卷積層為4層。按照最優參數進行實驗,可得判別器和生成器的損失函數曲線如圖7所示,混淆矩陣如圖8所示。
圖7中的曲線表明,生成器的損失值平滑下降并更快趨于穩定,而判別器的損失值存在小幅波動,但在達到一定迭代次數后也能趨于穩定,迭代次數表明該網絡收斂速度較快,能在較少實驗次數中實現態勢的準確評估,且對較少標簽的數據信息具有同樣的高準確率,評估準確率達到了90.91%。
從圖8可以看出,在設置最優參數的基礎上,不同標簽比的混淆矩陣顏色清晰,且識別準確率均達到89%以上,這說明本網絡模型對低標簽比的樣本數據同樣適用,對于處理高維空戰數據和標簽缺失的樣本數據的態勢評估問題效果較好。
3.2.3 算法識別性能比較
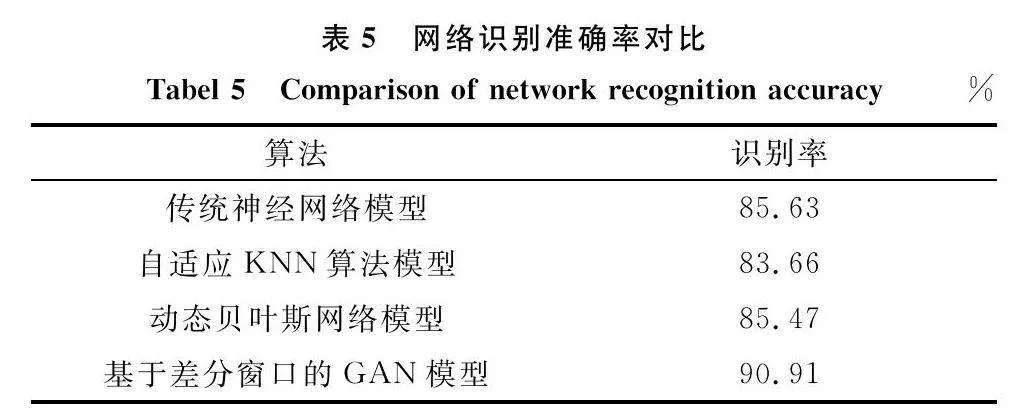
為對比各算法之間的識別性能優劣,使用同一樣本數據輸入模型并進行訓練,本文的對比實驗按照訓練集和測試集比例為1∶1進行劃分,生成樣本數據。設置本模型的網絡最優參數:批樣本數量為64、標簽比為0.8、迭代次數為800、卷積核為1×5、卷積層為4。將本文網絡模型與傳統神經網絡模型[10]、自適應K最近鄰(K-nearest neighbor,KNN)算法模型[29]和動態貝葉斯網絡模型[30]進行仿真對比,所得識別準確率如表5所示。通過對比可知,由于引用了半監督學習,本模型在處理樣本標簽不完整的數據方面展現出更好的評估效果。同時,通過對作戰數據進行差分化和窗口化處理,將空戰態勢分析問題轉化為一維時間序列特征提取問題,既提高了運算速率,也有效增強了數據穩定性。仿真對比結果表明,本模型在空戰態勢評估上具有更高的識別準確率。
4 結束語
本文針對空戰數據信息量大、特征提取難度較高、傳統算法對數據標簽依賴性強的問題,提出了一種基于差分窗口GAN的半監督學習方法空戰態勢評估模型。首先將空戰數據進行預處理,根據各要素權重提取主要影響因子,隨后對數據進行差分化和窗口化處理,構造特征參數矩陣對空戰數據信息進行訓練,實現態勢評估。
該網絡模型能夠實現對大樣本數據的特征提取,解決了真實單機對抗情況下訓練集樣本數據標簽缺失的問題,實現了離線狀態下對單機空戰飛行數據的準確態勢評估,為戰后分析提供了可靠的數據,為飛行員的作戰訓練和決策提供了依據,對于現代空戰研究具有重要意義。但由于網絡模型較為復雜,訓練難度大,訓練時間較長,該網絡模型僅適用于在離線狀態下對飛行數據進行戰后態勢分析,無法滿足作戰過程中的實時態勢評估條件。下一步的研究方向為如何簡化模型,縮短訓練時間,使該網絡模型更加符合實戰化需要。
參考文獻
[1]谷玉榮, 黃耀雄, 高艷, 等. 基于K-Means聚類算法的空中態勢威脅挖掘[J]. 火力與指揮控制, 2019, 44(4): 92-96.
GU Y R, HUANG Y X, GAO Y, et al. Aerial posture threat mining based on K-Means clustering algorithm[J]. Fire Control and Command Control, 2019, 44(4): 92-96.
[2]游航航, 余敏建, 韓其松, 等. 基于攻擊區的空戰指揮引導態勢評估[J]. 兵器裝備工程學報, 2019, 40(12): 29-34.
YOU H H, YU M J, HAN Q S, et al. Air combat command based on the attack zone guides the posture assessment[J]. Journal of Weapons and Equipment Engineering, 2019, 40(12): 29-34.
[3]胡濤, 王棟, 姜龍亭, 等. 空戰智能態勢評估技術研究與展望[J]. 軍事文摘, 2020(5): 19-22.
HU T, WANG D, JIANG L T, et al. Research and prospect of intelligent posture assessment technology for air comba[J]. Mili-tary Digest Journal, 2020(5): 19-22.
[4]史振慶, 梁曉龍, 張佳強, 等. 基于導彈攻擊區的空戰態勢評估[J]. 火力與指揮控制, 2018, 43(9): 89-93, 98.
SHI Z Q, LIANG X L, ZHANG J Q, et al. Assessment of the air combat posture based on the missile attack zone[J]. Fire Control and Command Control, 2018, 43(9): 89-93, 98.
[5]KUMAR S, TRIPATHI B K. Modelling of threat evaluation for dynamic targets using Bayesian network approach[C]∥Proc.of the International Conference on Emerging Trends in Engineering, Science and Tecnology, 2016: 1268-1275.
[6]肖亮, 黃俊, 徐鐘書. 基于空域劃分的超視距空戰態勢威脅評估[J]. 北京航空航天大學學報, 2013, 39(10): 1309-1313.
XIAO L, HUANG J, XU Z S. An assessment of the threat of an over-the-horizon air combat posture based on the division of airspace[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(10): 1309-1313.
[7]程天發, 葛泉波, 陳哨東, 等. 基于改進空戰威脅評估模型 的權重計算方法比較[J]. 火力與指揮控制, 2016, 41(1): 32-36.
CHENG T F, GE Q B, CHEN S D, et al. Comparison of weight calculation methods based on improved air combat threat assessment model[J]. Fire Control and Command Control, 2016, 41(1): 32-36.
[8]PATIL K, NAGWANI N K, TRIPATHI S. A parametric study of partitioning and density based clustering techniques for boxplot generation[C]∥Proc.of the 3rd International Conference for Convergence in Technology, 2018.
[9]SUN G L, LANG F, YANG M M, et al. Application protocols identification using non-parametric estimation method[C]∥Proc.of the 6th International Forum on Strategic Technology, 2011: 765-768.
[10]XU X M, YANG R N, FU Y. Situation assessment for air combat based on novel semi-supervised naive Bayes[J]. Journal of Systems Engineering and Electronics, 2018, 29(4): 768-779.
[11]JI H, HAN Q, LI X Y, et al. Air combat situation assessment based on improved cloud model theory[C]∥Proc.of the 8th Joint International Information Technology and Artificial Intelligence Conference, 2019: 754-758.
[12]LI F, LIU J B, ZHANG F H, et al. Situation assessment for beyond-visual-range air combat situation assessment based on dynamic Bayesian network[C]∥Proc.of the 25th Chinese Control and Decision Conference, 2013: 591-594.
[13]ZHAO K X, HUANG C Q. Air combat situation assessment for UAV based on improved decision tree[C]∥Proc.of the Chinese Control and Decision Conference, 2018: 1772-1776.
[14]XU X M, YANG R N, YANG Y. Threat assessment in air combat based on ELM neural network[C]∥Proc.of the International Conference on Artificial Intelligence and Computer App-lications, 2019: 114-120.
[15]LU C G, ZHOU Z L, LIU H Q, et al. Situation assessment of far-distance attack air combat based on mixed dynamic Bayesian networks[C]∥Proc.of the 37th Chinese Control Conference, 2018: 4569-4574.
[16]孫永芹, 世文榮, 彭海軍, 等. 基于改進非參量法的現代空戰威脅評估研究[J].火控雷達技術, 2013, 42(3): 28-33.
SUN Y Q, SHI W Y, PENG H J, et al. Modern air combat threat assessment research based on improved non-parametric method[J]. Journal of Fire Control Radar Technology, 2013, 42(3): 28-33.
[17]ARORA D, GARG M, GUPTA M. Diving deep in deep convolutional neural network[C]∥Proc.of the 2nd International Conference on Advances in Computing, Communication Control and Networking, 2020: 749-751.
[18]?ZMEN E, ?OGUN F, ALTIPARMAK F. Classification of imbalanced dataset using generative adversarial nets[C]∥Proc.of the 28th Signal Processing and Communications Applications Conference, 2020.
[19]TAHMID M, ALAM S, AKRAM M K. Comparative analysis of generative adversarial networks and their variants[C]∥Proc.of the 23rd International Conference on Computer and Information Technology, 2020.
[20]GOODFELLOW I, POUGET-ABADIE J, MIRZA M, et al. Generative adversarial networks[C]∥Proc.of the Neural Information Process System, 2014: 2672-2680.
[21]LI X Y, ZHANG Z K. The comparison between conditional generative adversarial nets and deep convolutional generative adversarial network, and its GUI-related application[C]∥Proc.of the 2nd International Conference on Big Data amp; Artificial Intelligence amp; Software Engineering, 2021: 601-609.
[22]RADFORD A, METZ L, CHINTALA S. Unsupervised representation learning with deep convolutional generative adversarial networks[EB/OL]. [2022-06-20]. https:∥arxiv.org/pdf/1511.06434.pdf.
[23]韓博, 周一鵬, 錢程, 等. 基于深度卷積生成對抗神經網絡的空戰態勢評估[C]∥2021年無人系統高峰論壇, 2021: 43-49.
HAN B, ZHOU Y P, QIAN C, et al. Air combat posture assessment based on deep convolutional generation of adversarial neural networks[C]∥Proc.of the 2021 Unmanned Systems Summit Forum, 2021: 43-49.
[24]YAN P Y, HE F, YANG Y J, et al. Semi-supervised representation learning for remote sensing image classification based on generative adversarial networks[J]. IEEE Access, 2020, 8: 54135-54144.
[25]王坤峰, 茍超, 段艷杰, 等. 生成式對抗網絡GAN的研究進展與展望[J]. 自動化學報, 2017, 43(3): 321-332.
WANG K F, GOU C, DUAN Y J, et al. Research progress and prospect of generative adversarial network GAN[J]. Journal of Automation, 2017, 43(3): 321-332.
[26]林懿倫, 戴星原, 李力, 等. 人工智能研究的新前線:生成式對抗網絡[J].自動化學報, 2018, 44(5): 775-792.
LIN Y L, DAI X Y, LI L, et al. A new frontier in AI research: generative adversarial networks[J]. Journal of Automation, 2018, 44(5): 775-792.
[27]王萬良, 李卓蓉. 生成式對抗網絡研究進展[J]. 通信學報, 2018, 39(2): 135-148.
WANG W L, LI Z R. Research progress on generative adversarial networks[J]. Journal of Communications, 2018, 39(2): 135-148.
[28]TAN K W, YAN W J, ZHANG L M, et al. Semi-supervised specific emitter identification based on bispectrum feature extraction CGAN in multiple communication scenarios[J]. IEEE Trans.on Aerospace and Electronic Systems, 2023, 59(1): 292-310.
[29]SUN S L, HUANG R Q. An adaptive K-nearest neighbor algorithm[C]∥Proc.of the 7th International Conference on Fuzzy Systems and Knowledge Discovery, 2010: 91-94.
[30]LU C G, ZHOU Z L, LIU H Q, et al. Situation assessment of far-distance attack air combat based on mixed dynamic Bayesian networks[C]∥Proc.of the 37th Chinese Control Conference, 2018: 4569-4574.
作者簡介
方 偉(1977—),男,教授,博士,主要研究方向為裝備仿真、虛擬現實。
張婷婷(1994—),女,碩士研究生,主要研究方向為信息系統仿真、智能處理。
譚凱文(1998—),男,碩士研究生,主要研究方向為特定輻射源識別、生成式對抗網絡、頻譜感知。
湯 淼(1993—),男,碩士研究生,主要研究方向為信息系統仿真、智能處理。
