基于Tri-feature訓練的目標與海雜波鑒別算法
2024-11-27 00:00:00吳巍薛冰劉丹丹
系統工程與電子技術 2024年9期
摘 要:
針對海雜波背景下末制導雷達容易出現錯誤檢測的問題,開展海雜波抑制和鑒別研究。采用基于Tri-feature訓練的目標鑒別分類算法,以目標幅度、峰值持續范圍和起伏率作為特征量,核函數選擇徑向基函數(radial basis function, RBF)。RBF非線性映射能力強,在高維空間中可以更好地表達數據之間的關系,然后進行支撐向量機(support vector machine, SVM)目標鑒別分類器設計和實驗數據驗證。經公開的實測數據驗證,所提算法準確率達到97%以上。通過與傳統的模板匹配識別方法進行對比,基于Tri-feature訓練的目標鑒別分類算法有更高的鑒別準確率,證明了所提方法的有效性和先進性。
關鍵詞:
海雜波抑制; 末制導雷達; 目標分類; 支持向量機
中圖分類號:
TP 391
文獻標志碼: A""" DOI:10.12305/j.issn.1001-506X.2024.09.05
Target and sea clutter identification algorithm based on Tri-feature training
WU Wei*, XUE Bing, LIU Dandan
(School of Weapon Engineering, Naval University of Engineering, Wuhan 430032, China)
Abstract:
Focusing on the issue of error detection in terminal guidance radar under sea clutter background, research on sea clutter suppression and discrimination is conducted. The target identification and classification algorithm based on Tri-feature training is adopted, and the target amplitude, peak duration range and fluctuation rate are used as feature quantities. The radial basis function (RBF) is selected as the kernel function, which has strong nonlinear mapping ability and can better represent the relationship between data in high-dimensional space. Then, the support vector machine (SVM) target identification and classification classifier design and experimental data verification are carried out. Verified by publicly available measured data, the accuracy rate of the proposed algorithm has reached over 97%. Compared with the traditional template matching recognition method, the target identification and classification algorithm based on Tri-feature training has higher identification accuracy, which proves the effectiveness and progressiveness of the proposed method.
Keywords:
sea clutter suppression; terminal guidance radar; target classification; support vector machine (SVM)
0 引 言
海雜波下的雷達檢測跟蹤問題一直是雷達領域的難點,特別是近年來大入射余角下強海雜波情況下的末制導雷達探測跟蹤問題受到廣泛關注。在強海雜波條件下,末制導雷達如果不能有效區分目標和雜波,會對精確制導造成嚴重影響,如何鑒別目標和海雜波是末制導雷達需要關注和解決的問題。
海雜波背景下的目標檢測問題是雷達探測領域的研究熱點,研究主要集中在海雜波特性認知研究、海雜波背景下弱目標檢測等。在海雜波幅度分布特性研究方面,在K分布、韋布爾分布等典型分布的基礎上,近年來有文獻又提出穩定分布模型、K+瑞利分布模型、Pareto分布模型、Pareto+噪聲分布模型及非廣延分布模型等,這些模型在拖尾建模中均得到應用,有效改善了建模精度[1-7]。文獻[8-12]在海雜波特性分析和處理方面做了大量有意義的工作,建立海雜波采集試驗條件,并公開非常有效的數據,給海雜波研究者提供很好的參考。在海上微弱目標檢測方面,文獻[13-24]也在海上微弱目標檢測、海雜波的形成機理、海雜波特性感知等方面做了大量的研究工作。隨著人工智能的興起,有學者將機器學習等智能方法與海上目標檢測結合起來。在將自適應技術應用到恒虛警方面,文獻[25]提出一種基于最大似然差的智能恒虛警率(constant 1 alarm rate, CFAR) 檢測器,可增強恒虛警檢測器在雜波邊緣環境中的魯棒性。文獻[26]提出一種基于神經網絡的開關型單元平均/有序統計量-CFAR(cell averaging/ordered statistic-CFAR, CA/OS-CFAR),用于提高不同環境下的雷達目標檢測性能。由于海雜波的分布特性具有很大的隨機性,為了提高檢測效率,恒虛警檢測模型需要根據實際情況進行智能選擇。近年來,支持向量機(support vector machine, SVM) 也逐漸應用到恒虛警檢測,文獻[27]提出一種利用SVM技術的智能CFAR檢測器,該檢測器利用先驗數據訓練SVM,隨后用訓練好的SVM識別當前工作環境并輸出一個判斷信號,通過判斷信號,該檢測器能夠智能選擇合適的檢測閾值。
由上文可見,傳統的CFAR檢測方法在復雜海雜波環境下檢測性能會有所下降,近年來基于機器學習的智能CFAR檢測逐漸受到關注,也取得了一些研究成果,利用機器學習對海雜波鑒別也開始成為一個研究領域[28-29]。根據海雜波與目標的特征區別,本文提出以幅度、峰值持續范圍、起伏率3個特征來描述海雜波和目標的區別,結合基于SVM的方法進行訓練和識別,并開展實測數據分析。
1 總體思路
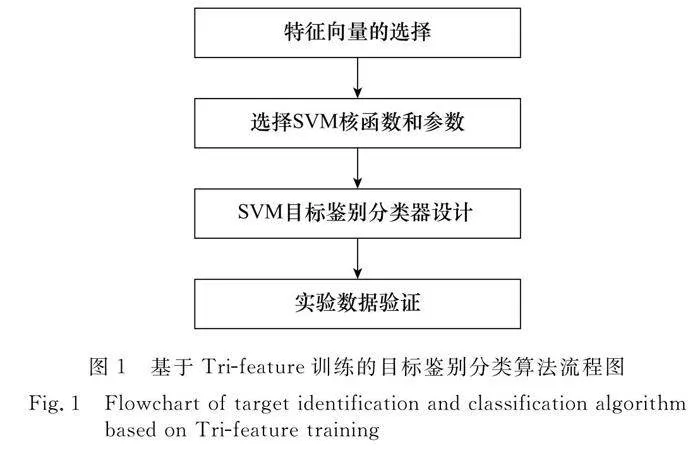
本算法的總體思路如下:首先對回波數據進行特征分析,選擇特征向量,其次對SVM核函數和具體參數進行選擇,最后進行SVM目標鑒別分類器設計和實驗數據驗證,流程如圖1所示。
2 Tri-feature特征向量模型構建
對訓練數據提取特征組建特征向量,選取幅度、峰值持續范圍和起伏率作為特征量。幅度和起伏率是信號在頻域上的特征,峰值持續范圍是信號在頻域上的特征。這3種特征目標與海雜波區別度大,獲取相對容易,計算過程簡單,適合作為特征向量進行訓練鑒別。
2.1 幅度模型
在雷達回波中,艦艇的回波信號一般比海雜波回波信號幅度更高,可以通過這一特性來對目標進行鑒別。幅度模型是一種用于描述時間序列數據中的周期性變化的模型,其公式可以表示為
y(t)=A(t)·sin(2πf(t)+(t))+ε(t)(1)
式中:y(t)表示t時刻的觀測值;A(t)表示t時刻的振幅;f(t)表示t時刻的頻率;(t)表示t時刻的相位;ε(t)表示t時刻的誤差項。幅度模型的主要思想是將時間序列數據分解為周期性變化和隨機誤差兩部分,以便更好地理解和預測數據的變化趨勢。
2.2 峰值持續范圍模型
本文主要在頻譜的振幅上進行形態學的分析,首先對信號進行傅里葉變換,將信號從時域轉換到頻域。然后,通過對頻譜振幅進行分析,可以獲得信號的峰值形態學特征。不同的目標和雜波,在形態上有的是窄而尖的,有的是擴展的、多峰的,目標是單峰或是擴展,可以作為區分目標與海雜波的特征。對給定的信號序列,可以通過觀察峰值持續范圍來對不同目標進行區分,目標大多是單峰值,海雜波可能出現擴展特性,峰均比 (peak to average power ratio, PAPR) 是一種用來描述無線通信系統中信號功率的統計量,表示信號中最高峰值功率與平均功率之間的比值,可以描述峰值持續范圍的特性。峰值持續范圍可以表示為
PAPR=INTmax0≤t≤T|x(t)|2mean0≤t≤T|x(t)|2(2)
式中:x(t)是信號的時域序列;INT(·)表示取整為最接近的整數。
2.3 起伏率模型
起伏率用來描述信號波動程度,即某一段時間內信號幅度的變化程度,艦船目標的信號回波比較穩定,其回波幅值起伏率較小。海浪運動不穩定,在一段時間內海浪的回波有明顯的變化。可以利用這一特征來進行目標鑒別,起伏率公式可以表示為
u(t)=a(t)-b(t)a(t)(3)
式中:u(t)表示t時刻的起伏率;a(t)表示t時刻的幅值;b(t)表示t-1時刻的幅值。
3 SVM的參數選擇
3.1 核函數的選擇
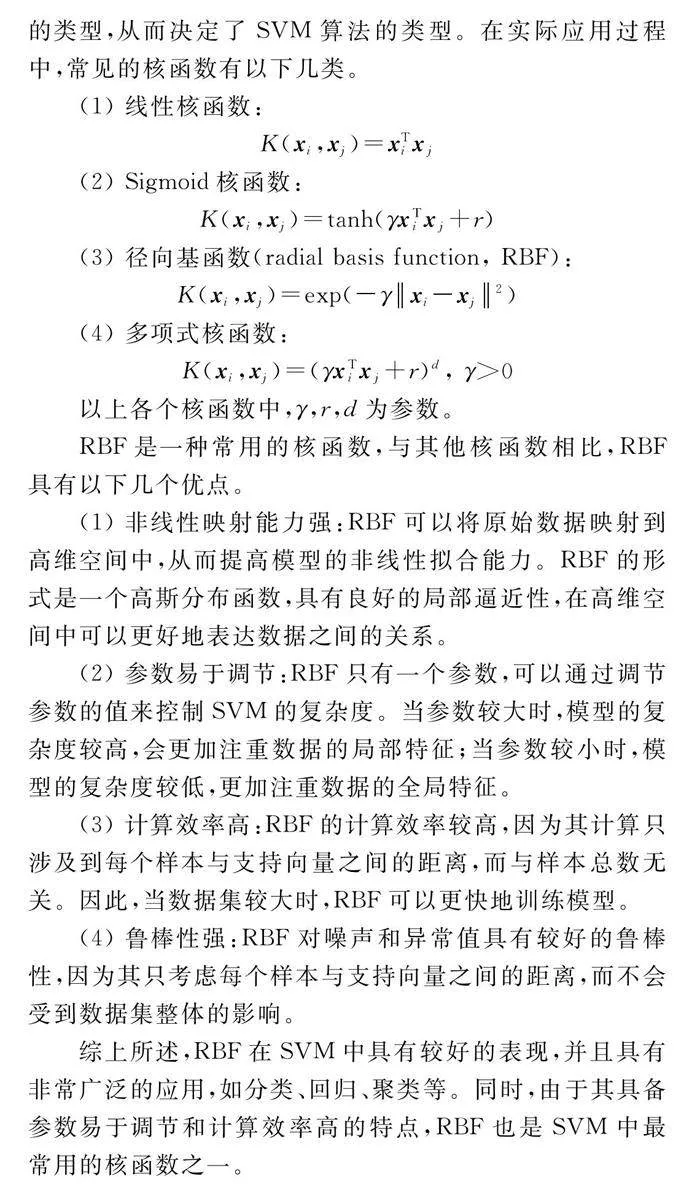
核函數K(xi,xj)決定了所構造的SVM算法中分類面的類型,從而決定了SVM算法的類型。在實際應用過程中,常見的核函數有以下幾類。
(1) 線性核函數:
K(xi,xj)=xTixj
(2) Sigmoid核函數:
K(xi,xj)=tanh(γxTixj+r)
(3) 徑向基函數(radial basis function, RBF):
K(xi,xj)=exp(-γxi-xj2)
(4) 多項式核函數:
K(xi,xj)=(γxTixj+r)d, γgt;0
以上各個核函數中,γ,r,d為參數。
RBF是一種常用的核函數,與其他核函數相比,RBF具有以下幾個優點。
(1) 非線性映射能力強:RBF可以將原始數據映射到高維空間中,從而提高模型的非線性擬合能力。RBF的形式是一個高斯分布函數,具有良好的局部逼近性,在高維空間中可以更好地表達數據之間的關系。
(2) 參數易于調節:RBF只有一個參數,可以通過調節參數的值來控制SVM的復雜度。當參數較大時,模型的復雜度較高,會更加注重數據的局部特征;當參數較小時,模型的復雜度較低,更加注重數據的全局特征。
(3) 計算效率高:RBF的計算效率較高,因為其計算只涉及到每個樣本與支持向量之間的距離,而與樣本總數無關。因此,當數據集較大時,RBF可以更快地訓練模型。
(4) 魯棒性強:RBF對噪聲和異常值具有較好的魯棒性,因為其只考慮每個樣本與支持向量之間的距離,而不會受到數據集整體的影響。
綜上所述,RBF在SVM中具有較好的表現,并且具有非常廣泛的應用,如分類、回歸、聚類等。同時,由于其具備參數易于調節和計算效率高的特點,RBF也是SVM中最常用的核函數之一。
3.2 具體參數的選擇
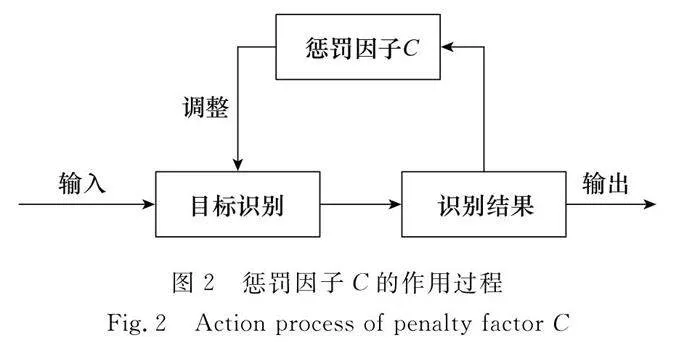
參數選擇實際上是一個在設計SVM分類器過程中對其模型類別的選擇問題,也是整個分類器設計過程中的核心問題。在使用過程中,通常將懲罰因子C和SVM核函數的參數統稱為SVM超參數。通過最小化某個預測泛化誤差來獲得SVM的最佳超參數的重復實驗過程就是超參數調節。
RBF核函數是常用的核函數之一,其在SVM中的應用廣泛,而懲罰因子C也是SVM中非常重要的參數之一,主要用于控制支持向量的數量和決策邊界的復雜度。在SVM中,懲罰因子越大,決策邊界越復雜,支持向量的數量越少;懲罰因子越小,決策邊界越簡單,支持向量的數量越多。
RBF懲罰因子C的選擇通常使用交叉驗證的方法來確定。交叉驗證是一種常用的模型選擇方法,將數據集分為訓練集和測試集,通過在訓練集上訓練模型,在測試集上驗證模型的性能,以選擇最優的模型參數。在選擇懲罰因子C時,可以首先選擇一組懲罰因子C的候選值,然后對每個候選值進行交叉驗證,選擇在測試集上表現最好的懲罰因子C作為最終的模型參數。
具體地,可以將數據集分為K個子集,然后依次選取其中一個子集作為測試集,將其他K-1個子集作為訓練集。對于每個懲罰因子候選值,都在K-1個訓練集上訓練模型,然后在測試集上驗證模型性能,得到K個測試誤差。最后,將K個測試誤差取平均值,作為該懲罰因子C的交叉驗證誤差。可以對每個懲罰因子C的候選值都進行上述操作,得到每個懲罰因子C的交叉驗證誤差,然后選擇使交叉驗證誤差最小的懲罰因子C,將其作為最終的模型參數。
懲罰因子C的作用過程如圖2所示。需要注意的是,懲罰因子C的選擇應該根據具體的數據集和任務來進行調整,過小的懲罰因子C可能會導致過擬合,而過大的懲罰因子C可能會導致欠擬合。因此,在實踐中,最常用的實驗方法便是將樣本分為兩部分:一部分用于分類器的學習訓練,另一部分則專門用于驗證。這樣可以更加精確地反映訓練過的分類器對于待分類數據的分類準確度。
4 基于Tri-feature訓練的目標鑒別仿真實驗
4.1 SVM目標鑒別分類器設計
本次實驗主要針對應用于末制導雷達中基于SVM的目標識別方法,算法中應用到了上文所提到的3種目標特征,這些特征對于特定的目標具有較好的代表性,并且進行特征提取所需的步驟并不繁瑣,降低了對末制導雷達硬件的要求,也可以在一定程度上減少環境等因素的干擾。
對海末制導雷達常見的目標有艦、艇、海浪等,為了給后續的實驗提供更加準確的定義,并考慮到這些目標在特征上的差異,現將以上目標分為兩大類:① 艦船;② 海雜波。從回波的幅度、峰值持續范圍和起伏率特征來看,艦船與海雜波有較大差別。
末制導雷達基于SVM的目標識別算法流程如下。
(1) 獲取以上提到的海面環境下的兩種目標類型的具體目標樣本。
(2) 對獲取的樣本集進行預處理,采集各方面特征數據,并將這些數據組成一個包含n個特征值的特征向量(n的數值取決于具體使用的特征個數),該特征向量用于表征不同類型的目標。對不同種類的目標進行標簽設置(即1為目標,0為海雜波)。
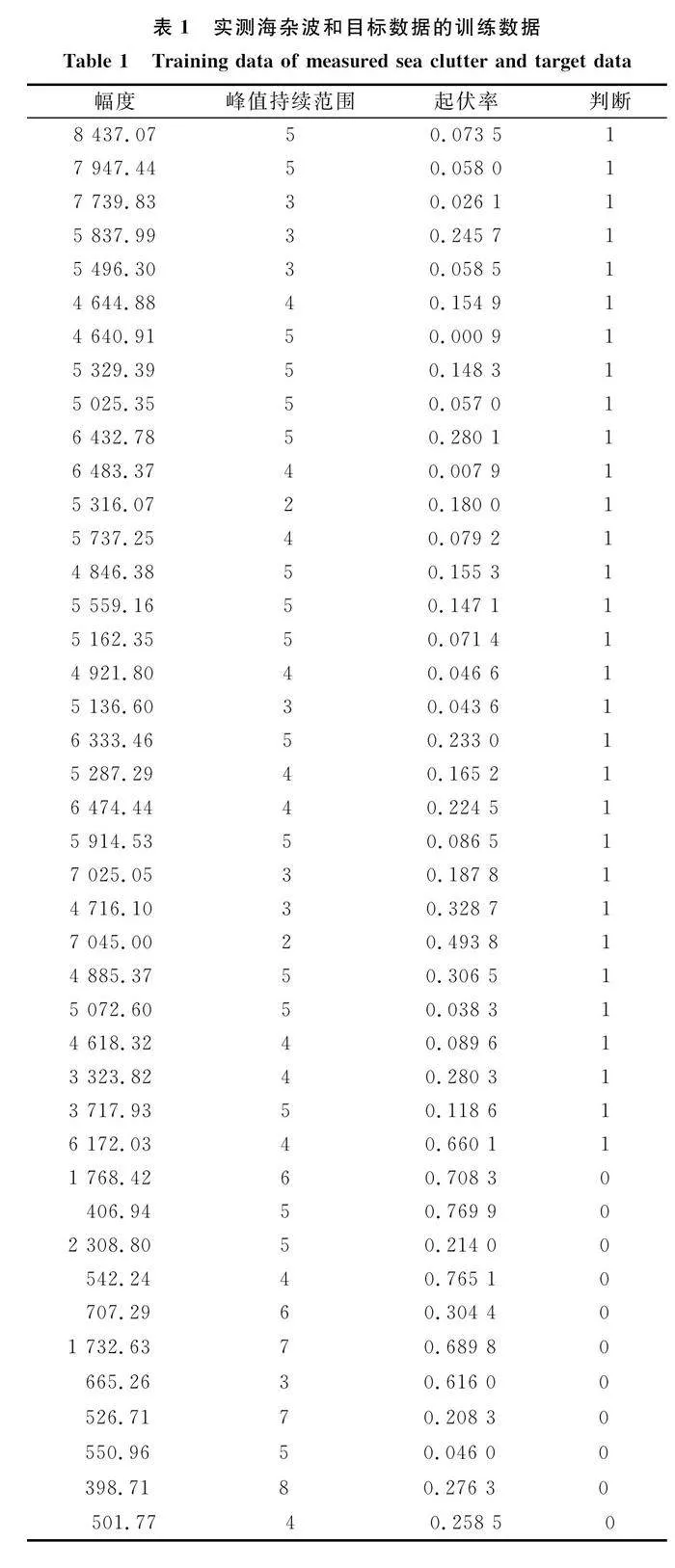
4.2 實驗數據驗證
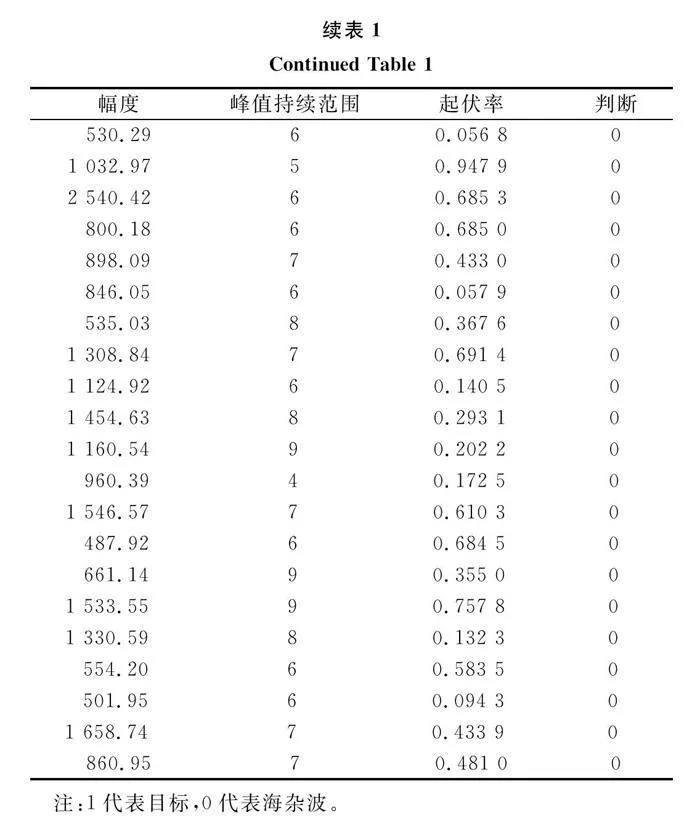
本實驗采用文獻[30]公布的海雜波數據,數據采集使用的是X波段的固態全相參雷達,工作方式為重直 (vertical-vertical, VV) 極化。在數據采集中,對各個距離門內海雜波數據進行正交采樣,得到復數據。數據為真實海面測量數據,適用于海面目標鑒別和反艦場景。利用實測海雜波和目標數據的訓練數據如表1所示。
4.2.1 單特征訓練目標鑒別方法數據驗證
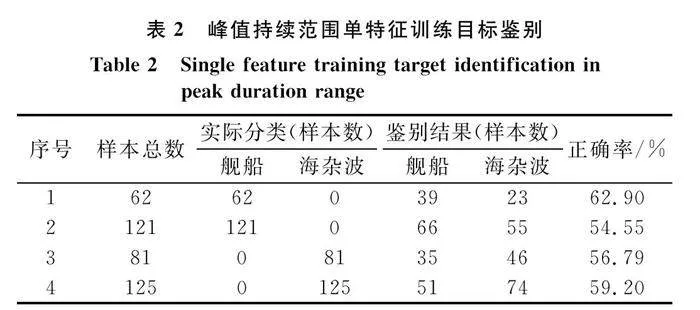
若不考慮起伏率和幅度,只考慮峰值持續范圍這一個特征,利用仿真實驗分析了其識別效果。序號1和序號2選取包含艦船的數據序列,序號3和序號4選取只包含海雜波的數據序列,生成測試樣本。對只使用峰值持續時間單特征對目標進行鑒別分類的效果進行測試,峰值持續范圍單特征訓練目標鑒別結果如表2所示。
表2實驗數據結果表明,峰值持續范圍單特征訓練目標鑒別方法對艦船的識別準確度不高于63%,海雜波不高于60%。可見,峰值持續范圍單個特征識別精度較低,區分度不大,需要利用多特征來增加識別的準確度。
4.2.2 基于Tri-feature訓練的目標鑒別分類算法數據驗證
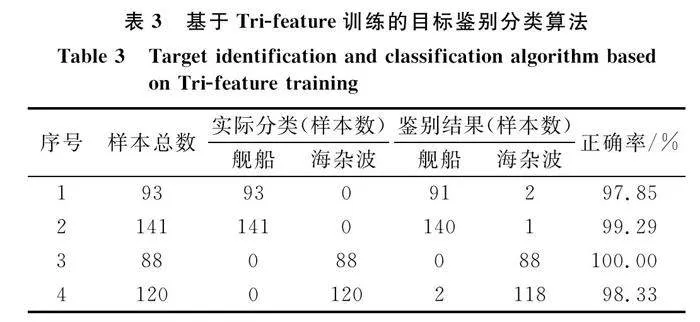
序號1和序號2選取艦船的Tri-feature數據序列,序號3和序號4選取海雜波的Tri-feature數據序列,生成測試樣本,對基于Tri-feature訓練的目標鑒別分類算法分類效果進行測試。
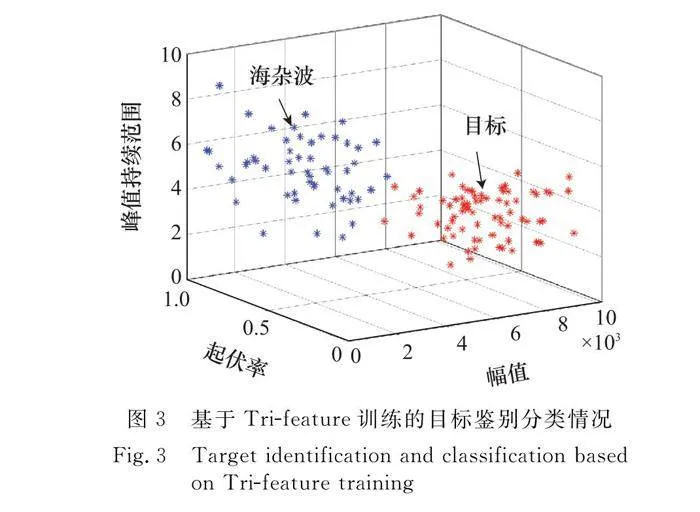
對數據進行目標鑒別情況分類,分類情況如圖3所示。
圖3中,海雜波與目標分界面明顯,分類混雜程度很小,鑒別精確度高。對4組測試樣本進行鑒別后,結果如表3所示。
表3實驗數據結果表明,基于Tri-feature訓練的目標鑒別分類算法對艦船的識別準確度在97%以上,海雜波在98%以上,識別準確度保持在較高水平。
4.2.3 與其他識別方法的比較情況
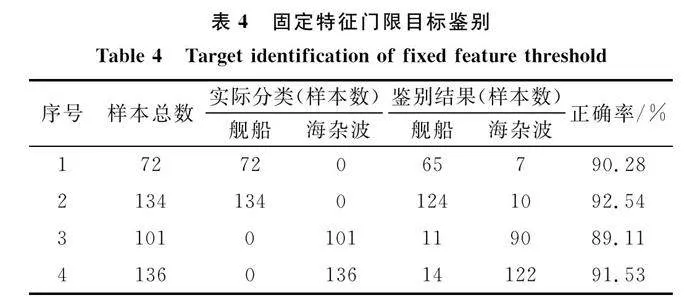
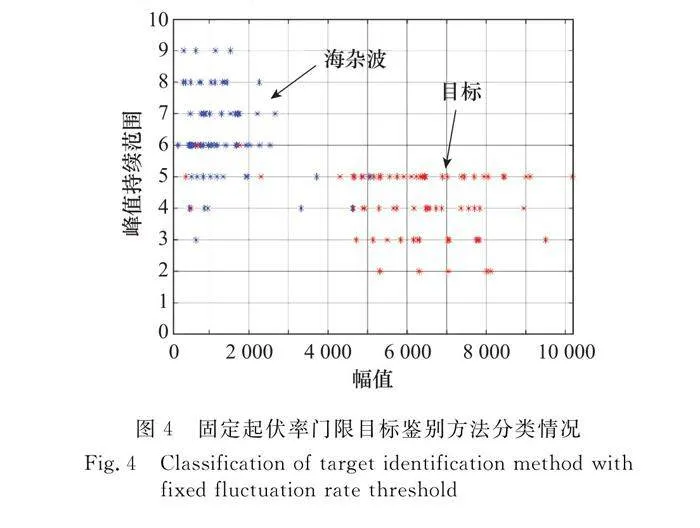
模板匹配方法是最常用的識別方法,主要通過經驗設置門限。下面根據經驗設置門限,對數據進行人工統計,發現目標信號的起伏率一般不大于0.2。所以,設置起伏率為0.2的固定門限,其他兩種特征進行類似設置。在數據樣本選取方面,序號1和序號2選取包含艦船回波信號的數據序列,序號3和序號4選取只有海雜波的數據序列,生成測試樣本。對固定起伏率特征門限目標鑒別方法分類效果進行測試。對數據進行目標鑒別情況分類,結果如圖4所示。
圖4中,海雜波與目標分界線較不明顯,分類有一定的混雜,鑒別精確度偏低。對4組測試樣本進行鑒別后,結果如表4所示。
表4實驗數據結果表明,傳統模板匹配方法的識別率有時會下降。在多數情況下,艦船和海雜波的正確識別概率在90%左右,相比于基于Tri-feature訓練的目標鑒別分類算法,鑒別準確度有明顯下降。
實驗數據結果表明,利用峰值持續范圍單特征鑒別目標和海雜波的正確率比較低,如表1所示,正確率只有60%左右。需要用多個特征進行鑒別,利用傳統模板匹配的方法對3個特征進行判斷,識別正確率在90%左右,比峰值持續范圍單個特征有所提高,這說明幅值和起伏率特征起到了重要作用。但是,由于門限設置為經驗值,因此識別準確度還不精確。利用所提方法進行3種特征的SVM方法訓練和識別,識別準確率可穩定達到97%以上,證明了多特征智能鑒別海雜波的思路和方法的有效性。
5 結 論
本文采用基于Tri-feature訓練的目標鑒別分類算法,以目標幅度、峰值持續范圍和起伏率作為特征量,選擇非線性映射能力強的RBF進行SVM目標鑒別分類器設計,并開展了實測數據驗證。通過比較不同情況下的識別精度,證明單一特征識別精度不夠,例如峰值持續范圍識別精度只有60%左右。通過多特征識別,利用傳統的模板匹配,識別精度可提升至90%左右。但是,由于門限由少量數據或經驗獲得,往往不是最優的,因此識別還存在一定誤差。所提基于Tri-feature訓練的目標鑒別分類算法能得到令人滿意的鑒別準確率,準確率達到97%以上,證明了所提方法的合理性和有效性。
參考文獻
[1] FARSHCHIAN M, POSNER F L. The Pareto distribution for low grazing angle and high resolution X-band sea clutter[C]∥Proc.of the IEEE Radar Conference, 2010: 789-793.
[2] ROSENBERG L, BOCQUET S. The Pareto distribution for high grazing angle sea-clutter[C]∥Proc.of the IEEE International Geoscience and Remote Sensing Symposium, 2013: 4209-4212.
[3] WEINBERG G V. Assessing Pareto fit to high-resolution high-grazing-angle sea clutter[J]. Electronics Letters, 2011, 47(8): 516-517.
[4] ROSENBERG L, WATTS S, BOCQUET S. Application of the K+Rayleigh distribution to high grazing angle sea-clutter[C]∥Proc.of the International Radar Conference, 2014.
[5] FICHE A, ANGELLIAUME S, ROSENBERG L, et al. Analysis of X-band SAR sea-clutter distributions at different grazing angles[J]. IEEE Trans.on Geoscience and Remote Sensing, 2015, 53(8): 4650-4660.
[6] HU J, TUNG W, GAO J. A new way to model nonstationary sea clutter[J]. IEEE Signal Processing Letters, 2009, 16(2): 129-132.
[7] TSIHRINTZIS G A,NIKIAS C L. Evaluation of fractional, lower-order statistics-based detection algorithms on real radar sea-clutter data[J]. IEE Proceedings-Radar, Sonar amp; Navigation, 1997, 144(1): 29-37.
[8] ZHOU H K,JIANG T. Decision tree based sea-surface weak target detection with 1 alarm rate controllable[J]. IEEE Signal Processing Letters, 2019, 26(6): 793-797.
[9] SONG J, CAI F Q, LIU H Y. SAR image detection of sea targets based on two-step CFAR detector of KK distribution[J]. The Journal of Engineering, 2019, 2019(19): 5644-5647.
[10] LIU H Y, SONG J, XIONG W, et al. Analysis of amplitude statistical and correlation characteristics of high grazing angle sea-clutter[J]. The Journal of Engineering, 2019, 2019(20): 6829-6833.
[11] LIU N B, XU Y A, TIAN Y H, et al. Background classification method based on seep learning for intelligent automotive radar target detection[J]. Future Generation Computer Systems, 2019, 94: 524-535.
[12] LIU N B, JIANG X Y, DING H. Summary of research on characteristics of radar sea clutter and target detection at high grazing angles[J]. Journal of Electronics amp; Information Technology, 2021, 43(10): 2771-2780.
[13] LI J Y, SHUI P L, GUO Z X, et al. Fast principal component analysis-based detection of small targets in sea clutter[J]. IET Radar, Sonar amp; Navigation, 2022, 16(8): 1282 -1291.
[14] ZHANG K, SHUI P L, FENG Y. Detection of sea-surface small targets masked by range sidelobes of large objects[J]. IEEE Trans.on Aerospace and Electronic Systems, 2022, 58 (2): 1446-1461.
[15] ZHANG K, SHUI P L. Estimation of complex high-resolution range profiles of ships by sparse recovery iterative minimization method[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 57(5): 3042-3056.
[16] LI X, SHUI P L, ZHANG Z D, et al. External calibration of P-band island-based sea clutter measurement radar on the sea surface[J]. IEEE Trans.on Geoscience and Remote Sensing, 2021, 59(7): 5711-5720.
[17] YU H, SHUI P L, LU K. Outlier-robust tri-percentile para-meter estimation of K-distributions[J]. Signal Processing, 2021, 181: 107906.
[18] XU S W, ZHU J N, JIANG J Z, et al. Sea-surface floating small target detection by multifeature detector based on isolation forest[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 704-715.
[19] LIANG X, SHUI P L, SU H T. Bi-phase compound-Gaussian mixture model of sea clutter and scene-segmentation-based target detection[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 4661-4674.
[20] SHUI P L, XIA X Y, ZHANG Y S. Sea-land segmentation in maritime surveillance radars via K-nearest neighbor classifier[J]. IEEE Trans.on Aerospace and Electronic Systems, 2020, 56(5): 3854-3867.
[21] LI X, SHUI P L, XIA X Y, et al. Analysis of UHF-band sea clutter reflectivity at low grazing angles in offshore waters of the Yellow Sea[J]. International Journal of Remote Sensing, 2020, 41(19): 7472-7485.
[22] YU H, SHUI P L, LU K, et al. Bipercentile parameter estimators of bias reduction for generalised Pareto clutter model[J]. IET Radar, Sonar amp; Navigation, 2020, 14(7): 1105-1112.
[23] MOU X Q, CHEN X L, GUAN J, et al. Sea clutter suppression for radar PPI images based on SCS-GAN[J]. IEEE Geoscience and Remote Sensing Letters, 2021, 18(11): 1886-1890.
[24] SHUI P L, LI D C, XU S W. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Trans.on Aerospace and Electronic Systems, 2014, 50(2): 1416-1430.
[25] 張仁李, 盛衛星, 馬曉峰. 基于最大似然差的智能恒虛警檢測器[J]. 系統工程與電子技術, 2011, 33(12): 2631-2637.
ZHANG R L, SHENG W X, MA X F. Intelligent CFAR detector based on maximum likelihood difference[J]. Systems Engineering and Electronics, 2011, 33(12): 2631-2637.
[26] ROHMAN B P A, KURNIAWAN D, MIFTAHUSHUDUR M T. Switching CA/OS CFAR using neural network for radar target detection in nonhomogeneous environment[C]∥Proc.of the IEEE International Electronics Symposium, 2015: 280-283.
[27] WANG L, WANG D, HAO C. Intelligent CFAR detector based on support vector machine[J]. IEEE Access, 2017, 5: 26965-26972.
[28] 田玉芳, 尹志盈, 姬光榮. 基于SVM的海面弱目標檢測[J]. 中國海洋大學學報, 2013, 43(7): 104-109.
TIAN Y F, YIN Z Y, JI G R. Weak targets detection in sea clutter based on SVM[J]. Periodical of Ocean University of China, 2013, 43(7): 104-109.
[29] 蘇寧遠, 陳小龍, 關鍵, 等. 基于卷積神經網絡的海上微動目標檢測與分類方法[J]. 雷達學報, 2018, 7(5): 565-574.
SU N Y, CHEN X L, GUAN J, et al. Detection and classification of maritime target with micro-motion based on CNNs[J]. Journal of Radars, 2018, 7(5): 565-574.
[30] 關鍵, 劉寧波, 王國慶, 等. 雷達對海探測試驗與目標特性數據獲取——海上目標雙極化多海況散射特性數據集[J]. 雷達學報, 2023, 12(2): 456-469.
GUAN J, LIU N B, WANG G Q, et al. Sea-detecting radar experiment and target feature data acquisition for dual polarization multistate scattering dataset of marine targets[J]. Journal of Radars, 2023, 12(2): 456-469.
作者簡介
吳 巍(1981—),男,副教授,博士,主要研究方向為目標探測跟蹤。
薛 冰(1989—),女,講師,碩士,主要研究方向為海雜波處理。
劉丹丹(1991—),女,講師,博士,主要研究方向為渦旋波技術。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54