海上吊車多傳感器融合姿態角度解算方法研究
2024-12-04 00:00:00魏文濤
中國新技術新產品 2024年11期
關鍵詞:多傳感器

摘 要:本文針對海上吊車姿態角度解算精度不高的問題,提出了一種基于卡爾曼濾波的多傳感器融合姿態角度解算方法,即通過融合傾角傳感器和陀螺儀2種傳感器的數據,并采用卡爾曼濾波算法進行姿態角度解算。試驗結果表明,本文所提方法能夠有效降低姿態角度測量中的噪聲影響,提高測量精度和穩定性。
關鍵詞:海上吊車;多傳感器;融合姿態角度解算
中圖分類號:P 75 文獻標志碼:A
隨著全球海洋工程和船舶維修需求不斷增長,作為關鍵的工業設備,海上吊車得到了廣泛應用[1]。海上環境的復雜性是姿態角度解算領域的一個顯著挑戰。在海洋的波浪、潮汐和風力等因素的影響下,海上吊車執行吊裝任務時經常受到不斷變化的外部力的影響。這些環境因素不僅增加了姿態角度的變化幅度,還引入了額外的不確定性,使解算過程更復雜。設備本身的運動引起的不穩定性也是一個重要問題。海上吊車執行任務時可能會受船體搖擺、俯仰和橫滾等運動的干擾,這些運動給姿態角度的精準解算帶來了挑戰[2]。面對這些動態變化,現有方法表現出不足,因此需要更靈活、適應性更強的解算方法。另外,多傳感器信息的融合問題也是目前研究面臨的挑戰之一。海上吊車通常配備多種傳感器,如陀螺儀、加速度計和羅盤等,以獲取關于設備狀態的多樣信息。然而,如何有效融合這些多源信息,以提高解算的準確性,仍然是一個需要深入研究的問題。本文深入研究了海上吊車多傳感器融合姿態角度解算的方法,以有效應對目前海上吊車所面臨的各種挑戰[3]。
1 多傳感器液壓支架及其姿態角度數據獲取
1.1 傾角傳感器姿態角度
傾角傳感器使用邁科SVT626-90型雙軸傾角傳感器或類似的傳感器,安裝在頂梁和底座上,分別采集頂梁和底座的傾斜角度數據。該傳感器分辨率為0.001°,精度為0.05°,溫度漂移為0.008°/℃,電壓輸出為0V~10V,對應的測量角度為-90°~90°。電壓與角度間的關系可用公式(1)表示。
θ=18U-90 (1)
式中:θ為傾角傳感器的角度;U為該電壓的輸出值。
傾角傳感器的實際安裝面臨2個主要挑戰,一是安裝過程中可能存在載體軸與傳感器敏感軸不完全平行的安裝偏差;二是傾角傳感器2個測量軸間可能存在耦合作用,進而影響測量準確性[4]。這些因素的疊加會導致測量誤差增加,因此僅采用單一的傾角傳感器無法滿足精確測量的要求。
1.2 陀螺儀姿態角度
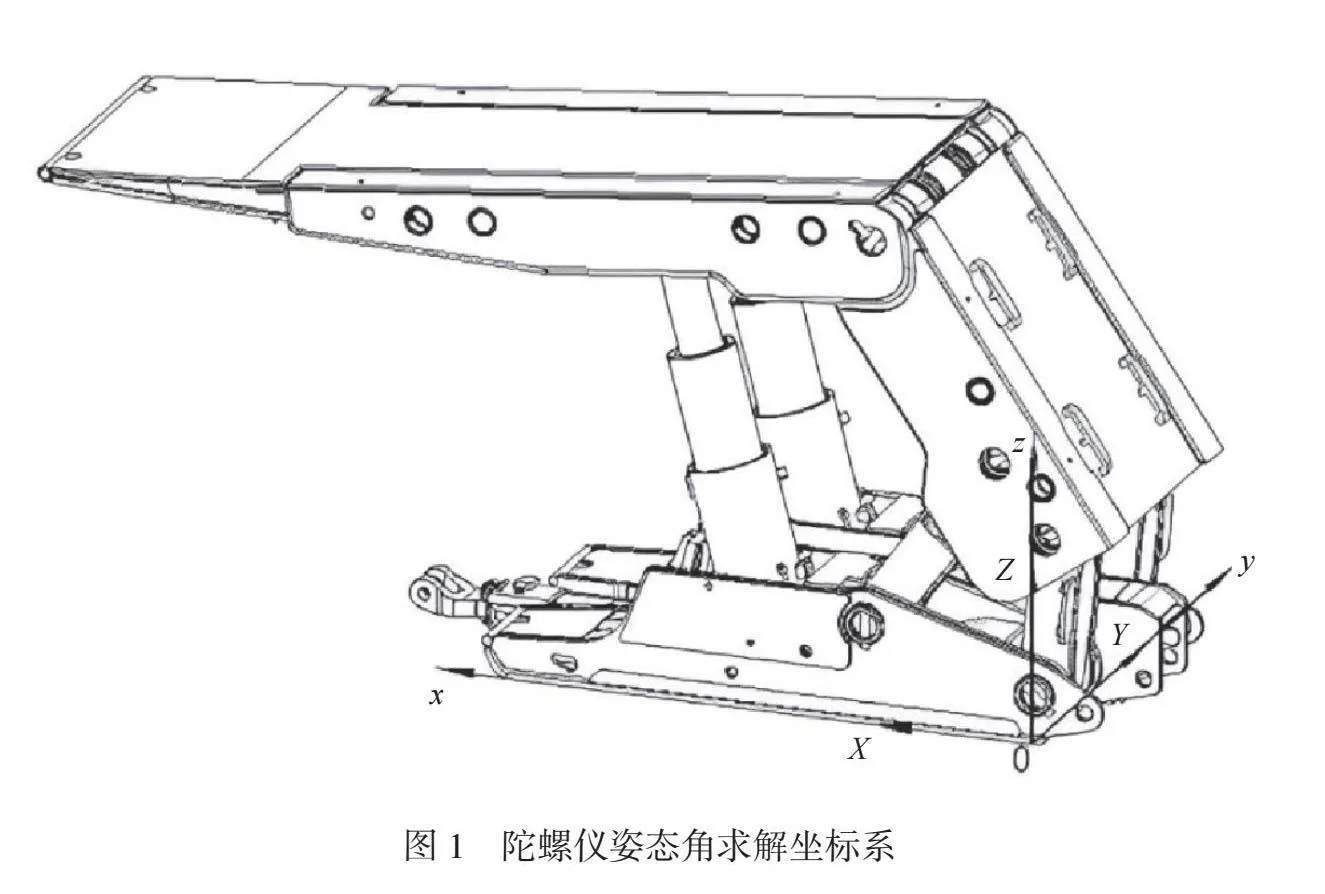
液壓支架的姿態描述將東北天坐標系作為參考坐標系,該坐標系由垂直于水平面向上的Z軸、磁北極方向的Y軸和水平向東的X軸組成,如圖1所示。該坐標系以水平面為基準,符合右手定則[5]。液壓支架自身的坐標系被稱為載體坐標系,它將陀螺儀定位在液壓支架底座上。液壓支架坐標系包括水平向右的X軸、水平向前的Y軸以及垂直于水平面向上的Z軸,同樣符合右手定則。當液壓支架沒有發生姿態變化時,參考坐標系和液壓支架坐標系是重合的。
在實際應用中,傾角傳感器和陀螺儀各具優、缺點。傾角傳感器的優勢是簡單、穩定且成本較低,但受安裝偏差和軸間耦合等因素的影響,可能會出現測量誤差。而陀螺儀具有更快的響應速度和更高的更新頻率,更適用于動態環境下的姿態控制,但同時也存在漂移和積分累積誤差的問題[6]。
2 卡爾曼濾波算法理論
卡爾曼(Kalman)濾波是一種通過最優估計將系統進行線性處理的濾波算法,其基于貝葉斯濾波理論,通過融合系統的動態模型和傳感器測量數據,對系統的狀態進行最佳估計。卡爾曼濾波的目標是在均方差最小的基礎上對多傳感器信息進行最佳估計,從而有效降低較大隨機誤差對觀測值的影響,提高系統狀態估計的精確性和穩定性。其估計準則如公式(2)所示。
E{[X-(Z)]T[X-(Z)]}≤E{[X-(Z)]T[X-(Z)]}
(2)
式中:X為n維系統的狀態量;Z為m維度系統的觀測量;(Z)為Z對X的估計,其中估計誤差=X-(Z);為Z對X的其他估計。
在卡爾曼濾波中,基于最小均方誤差準則,濾波過程分為時間更新(預測)和觀測更新(校正)2個步驟,這2個步驟一起構成了卡爾曼濾波器的運行流程。在時間更新步驟中,通過系統模型預測系統的當前狀態,從而得到系統的先驗估計。這一步體現了系統狀態的時間推進,將時刻k的狀態值預測到時刻k+1。在觀測更新步驟中,將傳感器觀測值作為濾波器的輸入,校正先驗估計,從而得到系統的后驗估計。這一步體現了傳感器測量值與先驗估計相結合,對系統狀態進行校正和調整。
3 基于卡爾曼濾波的液壓支架姿態角度融合求解方法
3.1 液壓支架姿態角度融合解算方案
液壓支架頂梁和底座的姿態角度融合解算方案圖如圖2所示。第一步,將傾角傳感器和陀螺儀組合在一個液壓支架上,用來模擬或調整頂梁和底座的相對姿態。這一步驟的關鍵是確保支架在操作過程中能夠準確控制頂梁和底座的相對位置與角度。第二步,將傾角傳感器和陀螺儀分別放置在液壓支架的頂梁和底座上,并分別測量頂梁和底座的姿態角度數據。分別測量的方式有助于更精確地獲取頂梁和底座的實際姿態,從而為后續的信息處理和融合提供準確的基礎。第三步,傳感器將實時測得的數據傳輸到處理單元,通過卡爾曼濾波算法對頂梁和底座的姿態角度數據進行濾波處理,以便后續的信息處理和融合。采用卡爾曼濾波算法對頂梁和底座的姿態角度數據進行濾波處理,并采用低估方式估計一個系統的狀態,其特別適用于帶有噪聲的傳感器數據,在這個場景中有助于提高測量的準確性。最終,通過信息融合得到的結果即為頂梁和底座的精確姿態角度。
3.2 卡爾曼濾波模型
卡爾曼濾波器是一種用于估計線性系統狀態的強大方法,其設計基于2個關鍵假設,即系統是線性的且噪聲具有高斯分布。在俯仰角估計的應用中能夠融合傾角傳感器和陀螺儀數據,從而提供更準確的狀態估計。通過建模系統動態和噪聲的高斯分布假設,卡爾曼濾波器能夠有效結合傳感器數據,克服了傾角傳感器和陀螺儀各自的局限性,進而對系統狀態進行精確估計,并為液壓支架等系統的控制和導航提供了可靠支持。具體步驟如下所示。
第一,系統狀態模型。定義一個狀態向量M,其中包括俯仰角的狀態變量、俯仰角本身和俯仰角速度,如公式(3)所示。
(3)
第二,系統動態模型。在線性系統的假設下,使用狀態轉移矩陣A和輸入矩陣B表示系統的狀態更新過程,同時考慮外部輸入uk和過程噪聲wk,用于描述系統狀態隨時間演變的流程,如公式(4)所示。
mk=A·mk-1+B·uk+wk (4)
第三,觀測模型。定義一個觀測方程,表示如何從傳感器測量中獲取對系統狀態的觀測。使用觀測矩陣H和觀測噪聲vk表示測量值,如公式(5)所示。
zk=H·mk+vk (5)
第四,卡爾曼濾波器的迭代過程。在每個時刻k,卡爾曼濾波器都執行2個關鍵步驟,即預測和更新。1)預測步驟(時間更新)。利用系統動態模型預測當前狀態的估計值k-和協方差矩陣Pk-。在預測過程中,卡爾曼濾波器會根據系統的動態行為對狀態進行推演,并通過協方差矩陣反映狀態估計的不確定性,使預測的狀態值具有可靠性和準確性。2)更新步驟(測量更新)。結合觀測模型和傳感器測量,通過卡爾曼增益Kk來修正預測值,得到最終的狀態估計k-和協方差矩陣Pk-。通過比較測量數據與預測值,卡爾曼增益計算可調整預測值,以更準確地反映系統的真實狀態。
4 試驗結果分析
為了驗證所提方法的有效性,本文在海上吊車頂梁上分別安裝傾角傳感器和陀螺儀,并通過數據采集設備獲取它們的傾角數據。在靜態條件下保持頂梁靜止,記錄傳感器和陀螺儀的傾角數據。在動態條件下,對頂梁施加一定的運動,以模擬實際工作條件下的振動和運動情況,記錄傳感器和陀螺儀的傾角數據。將采集的數據輸入卡爾曼濾波算法進行處理,然后融合傳感器和陀螺儀的數據,得到濾波后的姿態角度。
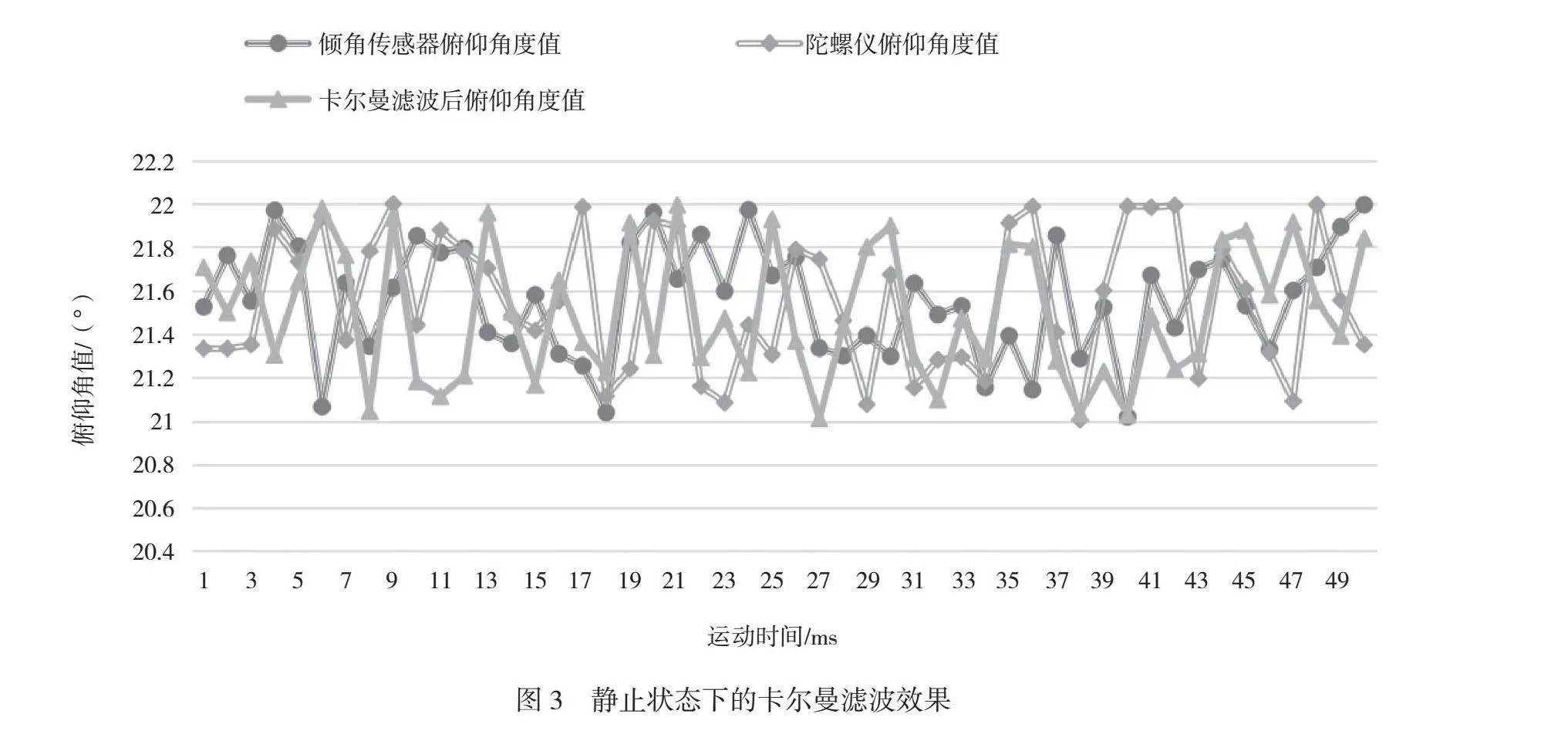
靜止狀態下的卡爾曼濾波效果如圖3所示。根據圖3可知,施加機械沖擊載荷時,傾角傳感器的測量角度明顯偏離真實角度,最大角度偏差為0.11°。表明卡爾曼濾波算法對陀螺儀受噪聲影響較大、偏差逐漸累積的情況能夠有效地進行數據融合和修正。通過與傾角傳感器測量數據進行融合,卡爾曼濾波能夠減少系統誤差,提高俯仰角測量的準確性和穩定性,從而在連續機械沖擊情況下具有更好的性能表現。
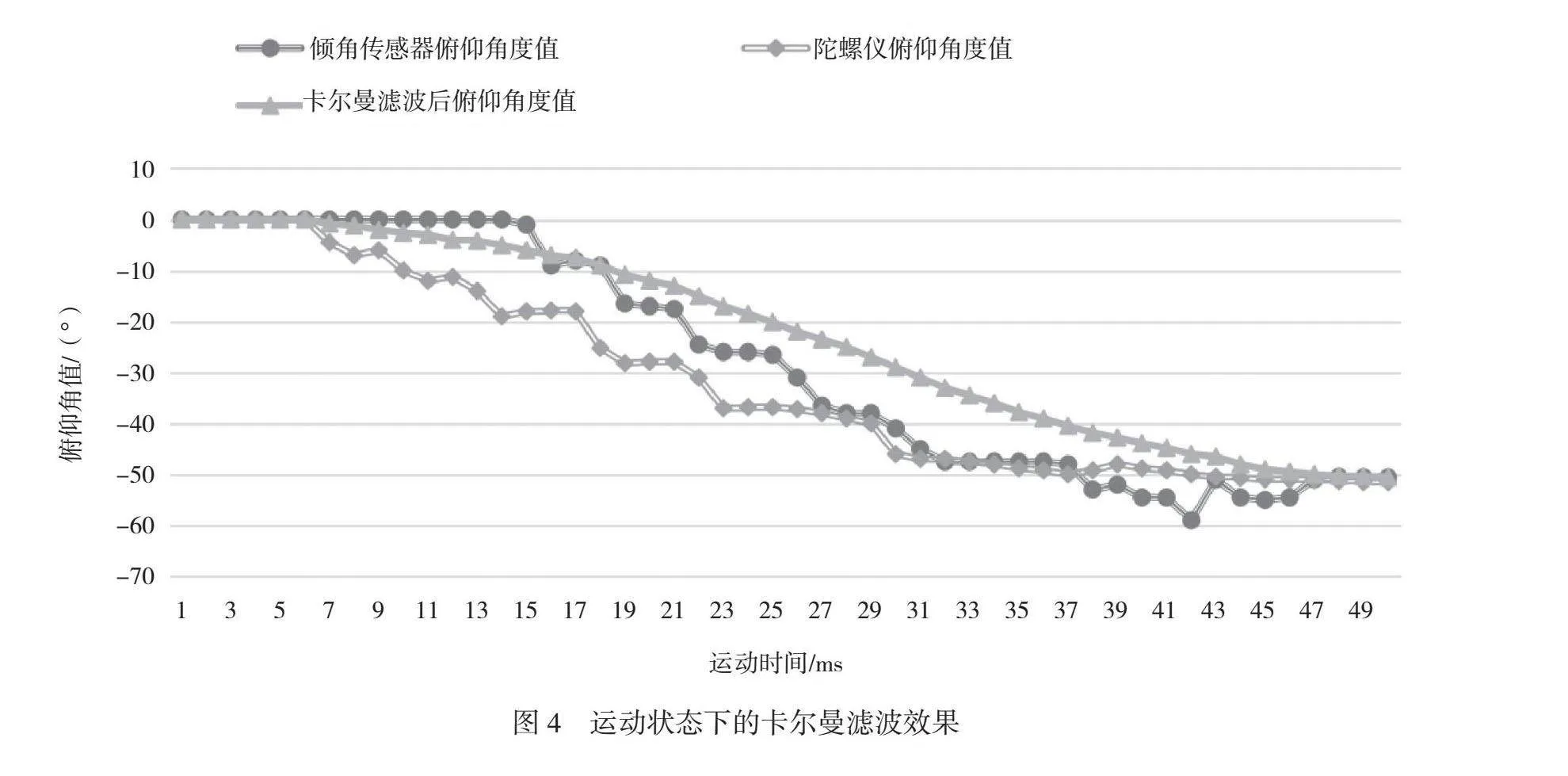
運動狀態下的卡爾曼濾波效果如圖4所示。根據圖4可得,在動態工況下,傾角傳感器受運動加速度的影響較大,特別是在43ms,測量角度甚至超過50°。傾角傳感器受加速度影響幾乎可達60°,導致在動態情況下,傾角傳感器的測量可靠性較低。然而,通過卡爾曼濾波算法融合后的俯仰角值比單純利用傾角傳感器和陀螺儀測量的角度更可靠。經過卡爾曼濾波處理后的角度更接近真實值,表明卡爾曼濾波算法在動態工況下對姿態角度的估計具有更高的準確性和穩定性,能夠有效克服傾角傳感器受運動加速度影響所帶來的不確定性。
5 結論
本文對海上吊車多傳感器融合姿態角度解算方法進行了深入研究,提出了一種基于卡爾曼濾波的解算方法。將傾角傳感器和陀螺儀2種傳感器的數據進行融合處理,并采用卡爾曼濾波算法,有效降低了姿態角度測量中的噪聲影響,提高了測量精度和穩定性。本文提出的融合姿態角度解算方法可為海上吊車操作人員提供準確的姿態角度信息,有助于提高操作的安全性和效率。
參考文獻
[1]張英杰.海上采油平臺電動吊車力矩儀改造[J].天津科技,2019,46(1):51-54.
[2]韓灝,張敬芳,郝尚清,等.支架回撤吊車擺動工況液壓系統特性研究[J].煤礦機械,2019,40(2):44-46.
[3]劉國珍.液壓支架回撤工藝研究[J].機械管理開發,2021,36(5):126-127.
[4]蘇榮鍵.基于多傳感器融合的線控轉向系統控制研究[D].柳州:廣西科技大學,2022.
[5]張劍波.基于陀螺儀與傾角儀組合的TBM姿態角測量研究[D].武漢:華中科技大學,2015.
[6]馮智勇,曾瀚,張力,等.基于陀螺儀及加速度計信號融合的姿態角度測量[J].西南師范大學學報(自然科學版),2011,36(4):137-141.
猜你喜歡
電腦知識與技術(2017年4期)2017-04-10 07:18:48
電子技術與軟件工程(2016年16期)2017-03-17 00:34:04
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
現代電子技術(2015年14期)2015-07-22 22:03:52
物聯網技術(2015年5期)2015-07-18 13:08:22
現代電子技術(2014年24期)2014-12-18 11:53:51
