基于云計算的智能交通云聯網監控系統設計
2024-12-06 00:00:00曾斯
中國新技術新產品 2024年13期
關鍵詞:云計算




摘要:本文針對傳統交通監控系統畫質低、準確率低和延遲高等問題,設計出一種基于云計算技術的智能交通云聯網監控系統。在硬件設計方面,使用解碼器與監控器為系統提供支持;在軟件設計方面,從特征分類、模型訓練和隱患檢測等方面完成監控程序與外設間的數據交換,進而應用云計算對交通數據信息進行準確識別與分類。試驗結果表明,與傳統交通監控系統相比,本文系統監控畫質良好、穩定性高,識別準確率也具有一定優勢,能夠滿足智慧交通建設所需。
關鍵詞:云計算;交通監控;車流量;交通數據
中圖分類號:TP39""""""""" 文獻標志碼:A
交通監控系統負責收集各類交通信息,能夠直觀了解車輛運行狀況與交通量,在提升道路使用效率與減少交通事故等方面為交通管理提供了必要輔助手段,對交通安全具有積極意義[1]。學界對交通監控系統的研究較早,例如屠康等綜合利用ViT和Swin Transformer,設計了一種基于深度學習的交通檢測系統,試驗驗證該系統在交通檢測中具有較好的泛化能力[2];王茁等將圖像處理技術引入監控系統,通過分布式計算拓展數據傳送功能,并結合道路交通擁堵的判定條件預測道路運行狀態,實現了交通情況的實時監測[3]。總結文獻可知,目前這些傳統交通監控系統的收集頻率較低,信息冗余較多,常出現畫質差、延遲高、準確率低和不穩定等問題。云計算技術具有較強的交通數據處理能力,在動態負載方面效果良好,能夠滿足智能交通監控的區域化與網格化服務。因此本文設計出一種基于云計算技術的智能交通云聯網監控系統。該系統改進了編碼流程,與傳統交通監控系統相比,能夠顯著提升畫質與準確率,有效降低整體延遲,具有良好的監控實時性與應用性。
1整體設計
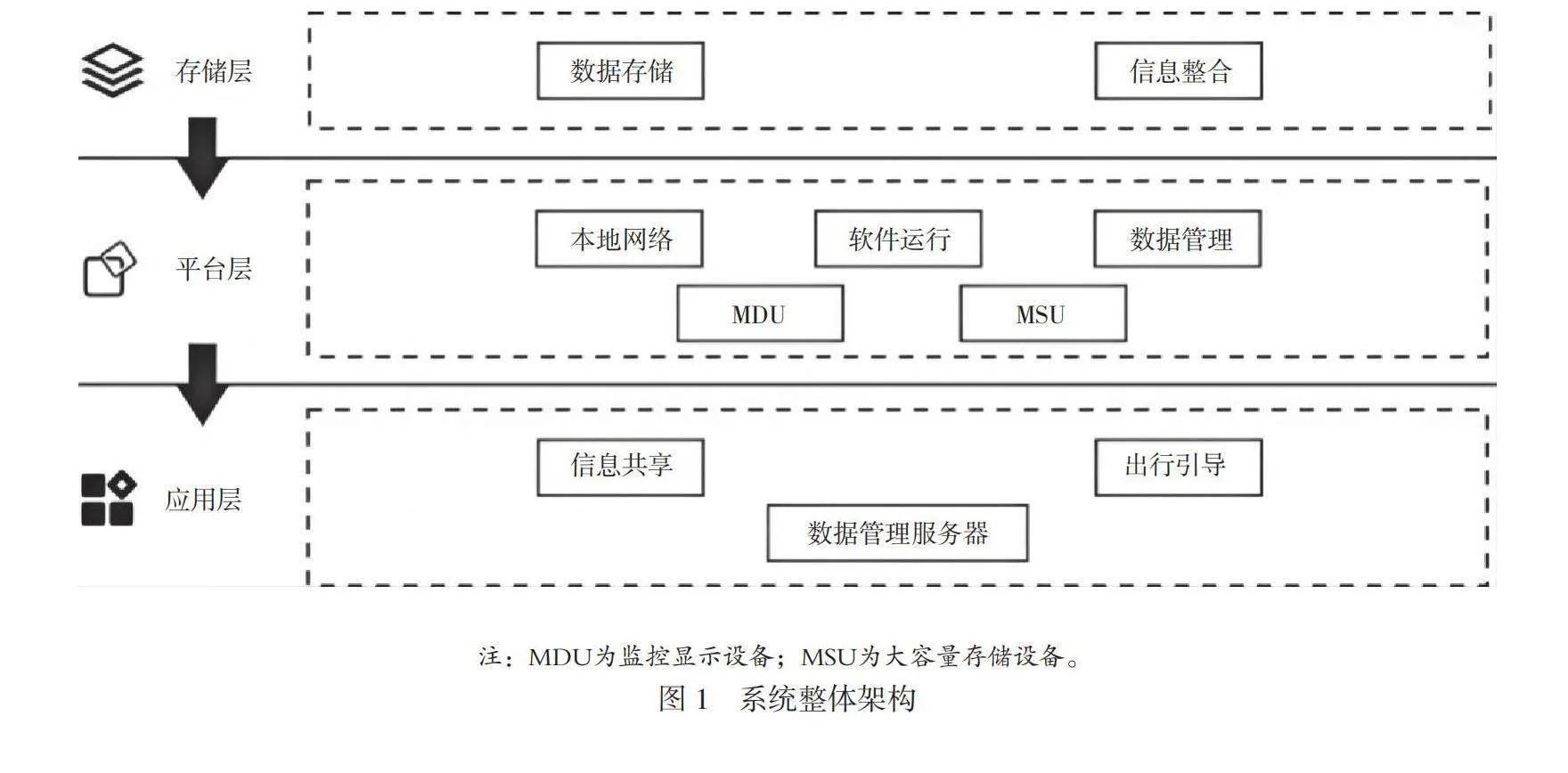
系統整體架構如圖1所示。系統整體框架包括存儲層、平臺層以及應用層。本文根據分層理念,創建智能交通數據資源池,進行實況錄音、錄像的傳輸與存儲、數據管理并監控統一調度,系統整體結構如圖1所示。存儲層可存儲云計算模型提供的交通數據,控制系統接入設備,同時整合所有交通信息,通過平臺層與應用層進行交互;平臺層采用分布式計算,由MDU、MSU設備構成,將監控系統部署到服務器終端,通過業務單元管理服務器,使城市交通信息與服務器交互,同時記錄所有交通數據,實現了本地網絡、交通軟件運行與網絡數據管理等功能;應用層可創建監控信息傳輸通道,并提供信息共享和出行引導,其終端支持不同接入方式,使監控信息進入數據管理服務器并作為系統外設完成連接,通過光纖接入進行交通數據收集與通信。
2硬件設計
2.1解碼器
利用云計算解碼器對交通視頻進行譯碼,將其輸出的控制信息轉化為實際操作頻率,由此對前端攝像裝置進行遙控。解碼電路如圖2所示,該解碼器(FST3257MX)的前端通過RS-485接口與VCR端的串口接口相連,通過轉換器將RS-232的數據流轉換為RS-485,并傳送至云端解碼器。云端解碼器將收到的命令進行譯碼,并將其轉化為相應的天線、視頻與其他操作模式的輸出信號,通過操作不同信號向解碼器與攝像裝置進行控制信號傳輸。接收到控制信號的電頻后,云端解碼器會執行相應信號命令。
2.2監控器
為滿足交通實際需要,需要打造全程監控。該監控器由PIC18F4520與OM-K2-S30等裝置構成,采用前沿視頻通信技術,可進行遠距離數據傳送。控制芯片以PIC18F452為核心,功能是收集監控各交通子節點的參數。OM-K2-S30是主控器,功能是將各子節點信息匯聚到一起并整合數據,以此監控交通全程。監控器的工作原理如下所示。1)接收來自攝像裝置或其他信號源的信號開始工作,這些信號可能是模擬信號或數字信號。2)對進入監控器的信號進行解碼與轉換,包括放大、濾波和去噪等。3)如果信號源是模擬信號,就在輸入前由轉換器轉換為數字信號,便于更好地呈現圖像。4)將處理后的信號發送至顯示設備上,采用顯示技術將其轉化為可見圖像,監控器上的像素矩陣根據接收到的信號來控制亮度。
3軟件設計
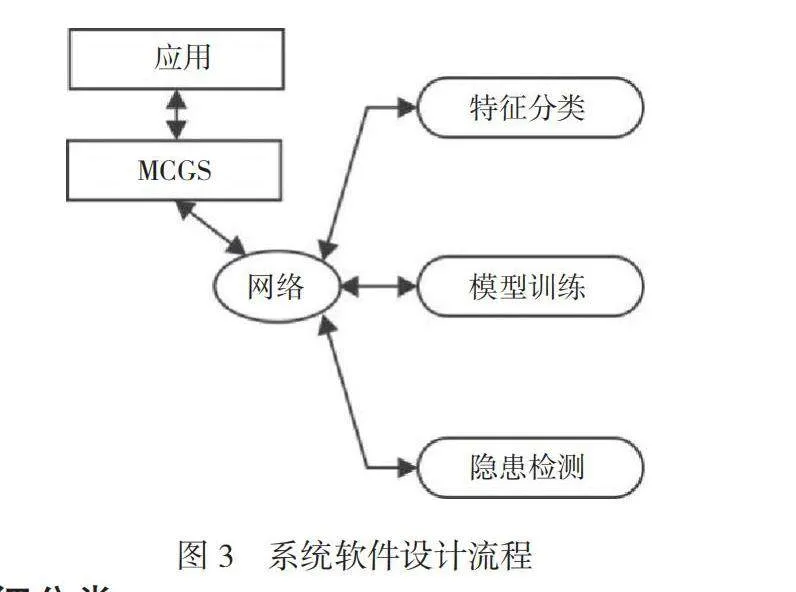
數據集成平臺選用監視與控制通用系統(Monitor and Control Generated System,MCGS),由監控系統收集、存儲、集成和共享網絡中的各類監控信息,為交通管理部門提供完整有效的數據源,由此實現監控程序與外設間的數據交換。系統軟件設計流程如圖3所示。
3.1特征分類
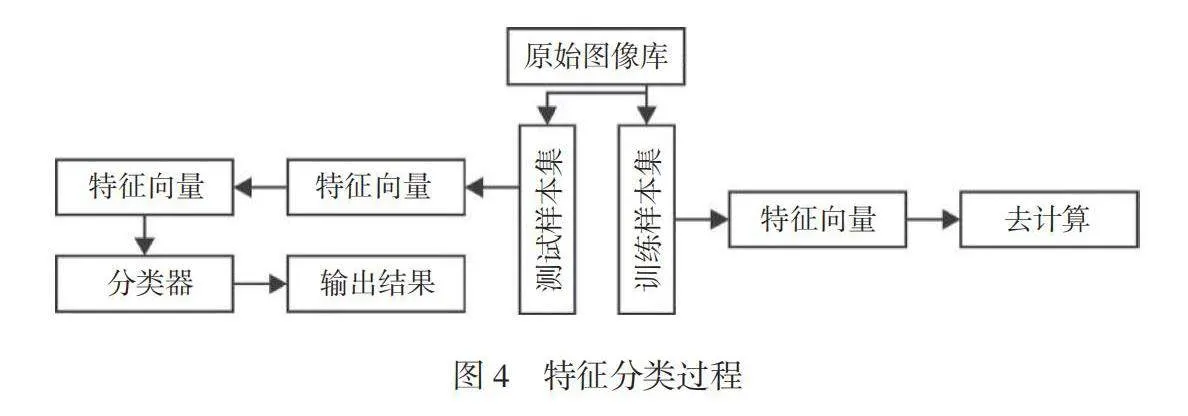
交通數據信息監測與分類過程的核心是識別的準確性與實時性。為了進行交通監控,使用云計算對交通數據信息特征進行識別分類,具體分類過程如圖4所示。云計算包括2個部分,一是利用數據訓練出分類器模型;二是數據測試,用以驗證模型準確性。
3.2模型訓練
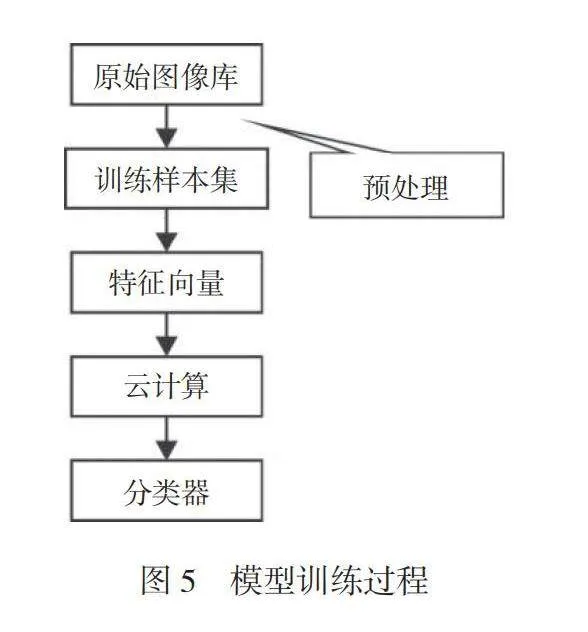
由于分類器需要以合適的圖像為樣本,因此需要對收集的樣本進行歸一處理,幀率保持在60f/s左右。根據場景差異,排除尺寸過小或無法分辨的圖片,甄選出可用目標。將可用圖片中的一半作為訓練樣本,其余為測試樣本。訓練樣本主要用于提取特征向量,因此將車輛、人流和設施等特征合并為一個多維特征向量,并將其作為對分類器進行模型訓練的輸入數據。利用分類器進行特征向量訓練,最終得到一個全新分類器,訓練最大迭代次數為 200 次,具體訓練流程如圖 5 所示。
3.3隱患檢測
通過上述流程得到分類器后便可進行圖像檢測。提取待檢測圖像的特征向量,將其輸入已訓練好的分類器中,由此可判斷待檢測序列是否存在交通隱患。如視頻中某路況存在隱患,便可在原圖像中標出區域,如果沒有隱患,就不做處理。
4監控過程
4.1車流量
在軟件設計的基礎上讀取存儲層交通數據,識別異常車輛信息,從而設計監控流程。設定交通數據范圍,例如設通行能力為x,修正系數為k1,根據交通車流量取值,數據收集間隔為a,則交通數據的車流量范圍r如公式(1)所示。
0≤r≤(1)
4.2速度
將r作為交通數據流的收集上限,根據特定周期進行數據收集,同時挖掘高峰階段的交通數據,初始化數據收集的起止時間,識別高峰階段收集間隔,并在查詢歸檔后完成數據維護工作。因為高峰階段交通數據流較多且顯著高于通信水平,所以有必要進行速度識別。設限速為sl,修正系數為k2,則交通數據的速度范圍s如公式(2)所示。
0≤s≤k2·sl(2)
4.3占有率
交通數據的車輛占有率取決于檢測時間與收集間隔的比值,合理范圍保持在100%以內。將車流量作為參數值,設收集時間為t,修正系數為k3,交通數據的車流量范圍為r,則交通數據的車輛占有率e如公式(3)所示。
(3)
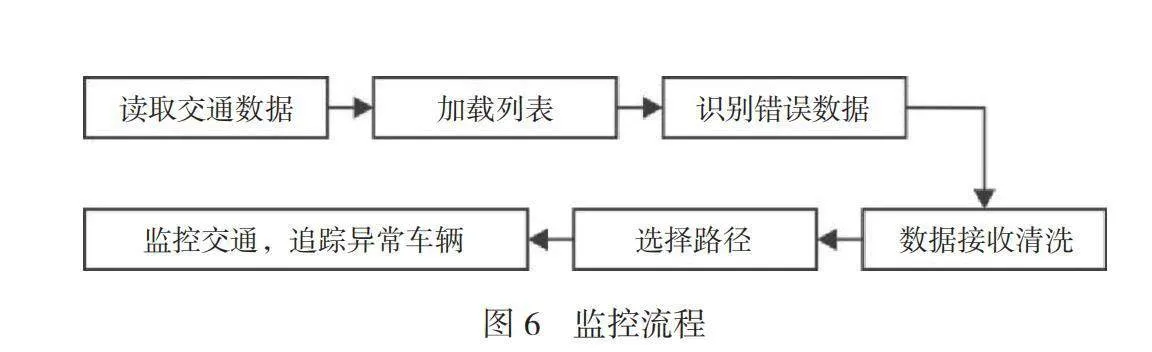
將車流量、速度和占有率作為基本參數代表參數內容,篩選交通數據流的限值,將限值的計算結果作為允許誤差大小,使交通數據流呈正態分布,對處于不合理范圍的數據進行標記,由此識別錯誤數據,即監控過程中的異常車輛。具體流程如圖6所示。
5系統試驗
試驗運行在Windows11系統上,CPU型號為Intel I913900K,GPU型號為DUAL-RTX4070-12G,仿真平臺選用ErgoSIM交通仿真平臺,其中GPU包括3283個流處理器。為了更好地比較本文系統與傳統系統的整體性能,重點測試監控系統的畫質、準確率與穩定性。
5.1畫質
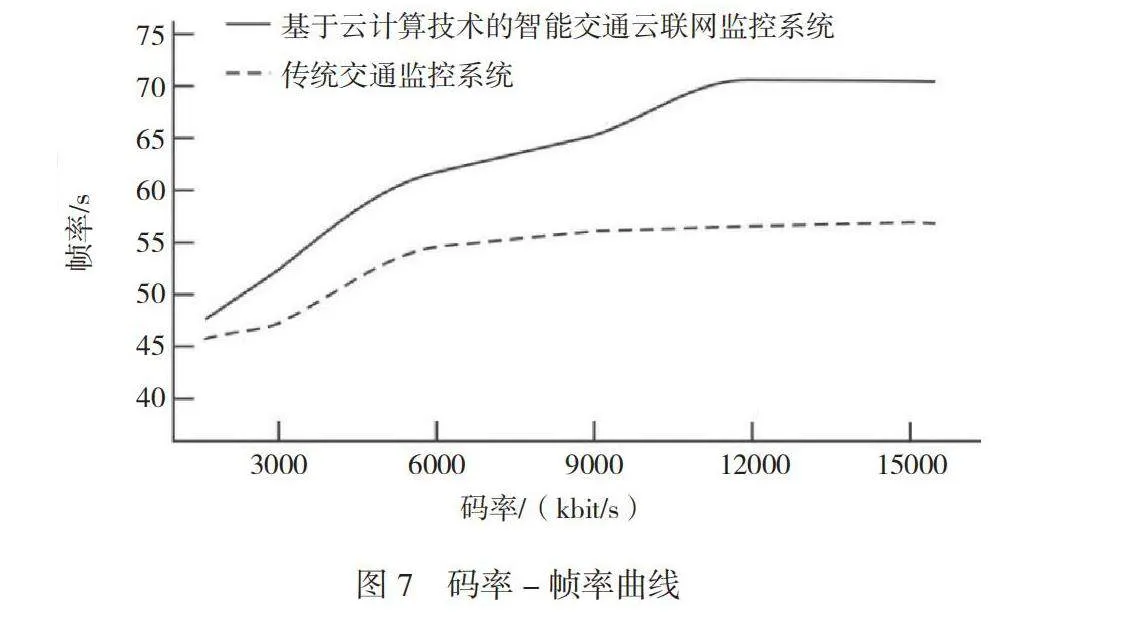
選取幀數最多的測試序列,分別使用本文系統與傳統系統進行編碼,并選取典型QP值(量化參數)進行測試,得到由低至高各自對應的碼率與幀率值。根據率失幀理論獲取所有碼率坐標,構建碼率-幀率曲線,如圖7所示。由試驗可知,本文系統的幀數整體上優于傳統系統,當碼率為12000kbit/s時,二者差距最大,表明本文系統編碼質量顯著高于傳統系統,失幀更小,畫質也更好。
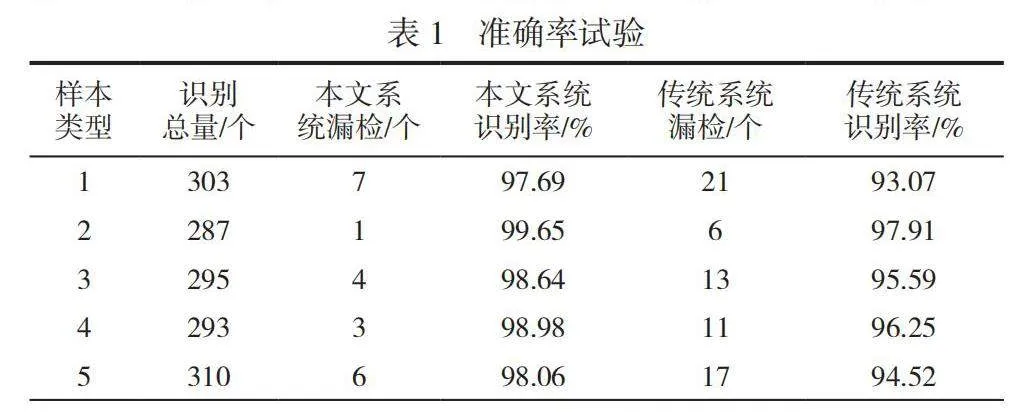
5.2準確率
為驗證系統識別準確性,與傳統系統進行比較試驗。在ErgoSIM平臺上構建雙向車道,將車道線標注清楚,并對通行與行駛情況進行高度模擬,使其貼合真實道路情況。試驗時使車輛按照指令頻繁通過2個系統的監控區域,并在某時間段進行分析,所得結果見表1。由試驗可知,本文系統的車牌識別準確率均值為98.60%,漏檢數量均值為4.2個;傳統系統的車牌識別準確率均值為76.85%,漏檢數量均值為13.6個。與傳統系統相比,本文系統識別率約提高21.25%,漏檢數量約減少約9.4個。由此可見,本文系統不僅提高了車牌識別準確率,還在一定程度上解決了車輛漏檢問題。
5.3穩定性
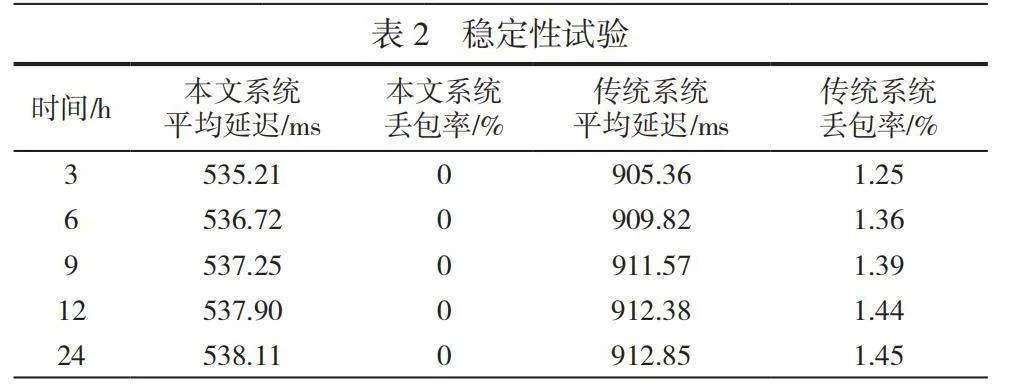
記錄系統在長期運行過程中的狀態,將直播視頻流輸出設置為分辨率1080ppi,幀率為30f/s,碼率為8000kbit/s, 得到系統平均延遲與丟包率情況,見表2。根據試驗可知,與傳統系統相比,本文系統能夠持續正常工作,沒有出現因延遲而丟包的問題。試驗24h后,本文系統的平均延遲仍然保持在較低水平,表明系統可滿足長期穩定的監控需求。
6結語
綜上所述,目前交通監控系統設計多以犧牲畫質換取低延遲,或以高延遲換取高畫質。本文系統充分發揮了云計算高效處理交通數據的優勢,成功實現了實時交通監控。經試驗驗證,本文系統運行穩定性較強,在高畫質的基礎上也能保證延遲較低,同時具有較高的識別準確率,能夠為管理者提供有效的監控畫面。在后續研究中,應逐步提高數據挖掘水平,以此促進智慧交通建設的可持續發展。
參考文獻
[1]蔣建金. 一種采用容器技術基于通用硬件的云計算軌道交通信號控制系統安全平臺[J]. 科學技術創新,2023(26):214-218.
[2]屠康,馬倩芳. 基于深度學習的交通事件檢測系統設計[J]. 無線互聯科技,2024,21(3):63-65.
[3]王茁,侯洪鳳. 基于圖像處理技術的道路監控系統設計[J]. 大連交通大學學報,2022,43(6):19-24.
猜你喜歡
數字技術與應用(2016年9期)2016-11-09 22:56:18
數字技術與應用(2016年9期)2016-11-09 00:07:05
知音勵志·社科版(2016年8期)2016-11-05 04:28:47
電腦知識與技術(2016年21期)2016-10-18 23:34:52
電腦知識與技術(2016年21期)2016-10-18 23:24:44
電腦知識與技術(2016年21期)2016-10-18 22:11:15
科技視界(2016年22期)2016-10-18 14:33:46
中國新通信(2016年16期)2016-10-18 10:49:17
大學教育(2016年9期)2016-10-09 08:54:03
科技視界(2016年20期)2016-09-29 13:34:06
