一種壓縮式垃圾車的壓縮循環冗余控制技術
2024-12-20 00:00:00李勝李紅朋夏甫根楊千文
專用汽車 2024年12期

摘要:探討了一種創新的應用于垃圾車的壓縮循環冗余控制技術,詳細介紹其原理、實現方法及應用前景,以期為垃圾車的上裝可靠性、安全性提供理論支撐和實踐指導。通過這項技術的實施與應用,可以有效降低垃圾車由于工作環境惡劣導致接近開關傳感器失效,從而引起的上裝壓縮循環功能失效,提升垃圾車的上裝可靠性,降低專用車廠家因該類微小故障而導致的大額售后成本。
關鍵詞:壓縮循環;冗余控制;開關模式;壓力模式;時間模式
中圖分類號:U461 收稿日期:2024-10-12
DOI:10.19999/j.cnki.1004-0226.2024.12.013
1 前言
隨著城鎮化及環衛作業機械化的發展,生活垃圾清運、固廢清運主要是通過可以自裝卸式垃圾車從小區收集清運,或由壓縮式垃圾車在主干道收運或轉運到壓縮站。這兩類車型是市場上最常見的帶垃圾壓縮功能的垃圾車。壓縮循環功能是這兩類垃圾車的核心功能,直接關系到車輛的垃圾裝載量及收運效率。
目前市場上垃圾車的壓縮功能控制,通常是基于接近開關傳感器檢測位置實現動作的連續控制。一旦接近開關傳感器故障或失效,就會導致垃圾車壓縮循環功能喪失,造成環衛工人無法及時完成垃圾收運。
由于垃圾收運通常在凌晨進行,一旦車輛故障,車輛生產廠家很難做到及時響應處理故障,這給車輛生產廠家帶來很大售后服務壓力。加之垃圾車工作條件比較惡劣,接近開關的故障率居高不下;同時接近開關傳感器本身檢測的是運動部件的位置,容易因松動、移位導致傳感器未正常感應,也會造成壓縮循環功能喪失,導致車輛無法正常作業。
當前垃圾車生產廠家主要是通過采用進口接近開關,來降低接近開關故障率,既帶來了成本上的提升,也無法從根本上解決接近開關容易失效及帶來整車壓縮功能失效的技術困境。
2 壓縮循環冗余控制技術的原理
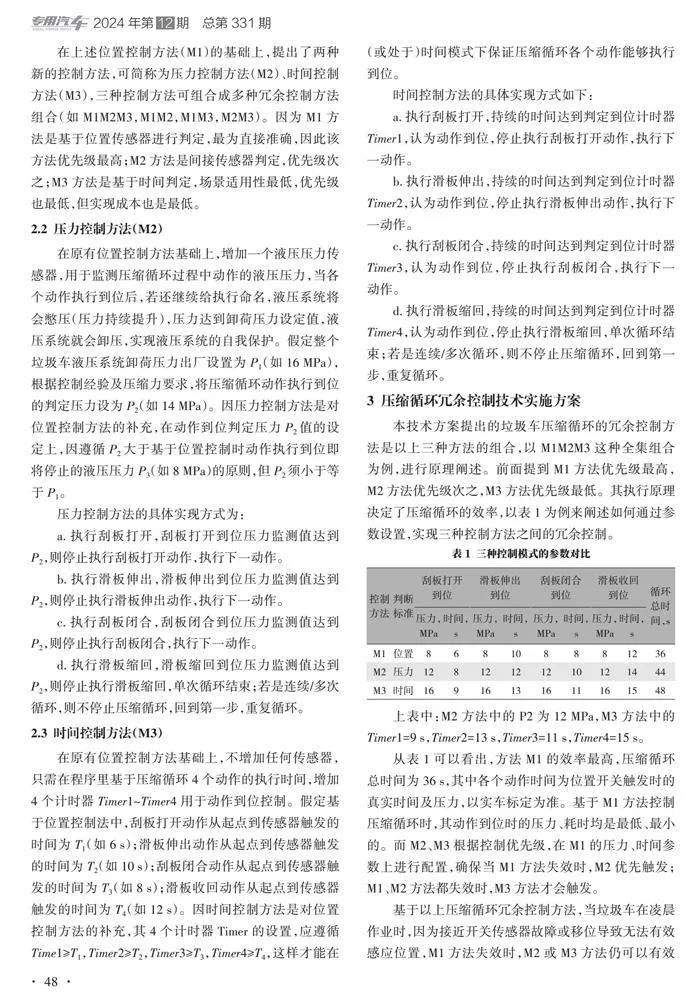
圖1所示為自裝卸式垃圾車及壓縮式垃圾車。壓縮式垃圾車的壓縮循環通常是基于位置控制模式,采用接近開關判斷動作執行情況,實現各個動作的循環往復[1]。一旦接近開關故障失效或移位導致無法感應,動作就會中斷或異常,造成整車功能的失效。
2.1 位置控制方法(M1)
當前主流的壓縮式垃圾車,滑板油缸多才采用內置于填裝器的方式[2-3],這類垃圾車普遍的壓縮循環控制方法(簡稱位置控制方法,假設為M1)的原理描述如下:
a.執行刮板打開,刮板打開到位接近開關傳感器觸發,停止執行刮板打開,執行下一動作。
b.執行滑板伸出,滑板伸出到位接近開關傳感器觸發,停止執行滑板伸出,執行下一動作。
c.執行刮板閉合,刮板閉合到位接近開關傳感器觸發,停止執行刮板閉合,執行下一動作。
d.執行滑板縮回,滑板縮回到位接近開關傳感器觸發,停止執行滑板縮回,單次循環結束。若是連續/多次循環,則不停止循環,回到第一步,重復循環。
在上述位置控制方法(M1)的基礎上,提出了兩種新的控制方法,可簡稱為壓力控制方法(M2)、時間控制方法(M3),三種控制方法可組合成多種冗余控制方法組合(如M1M2M3,M1M2,M1M3,M2M3)。因為M1方法是基于位置傳感器進行判定,最為直接準確,因此該方法優先級最高;M2方法是間接傳感器判定,優先級次之;M3方法是基于時間判定,場景適用性最低,優先級也最低,但實現成本也是最低。
2.2 壓力控制方法(M2)
在原有位置控制方法基礎上,增加一個液壓壓力傳感器,用于監測壓縮循環過程中動作的液壓壓力,當各個動作執行到位后,若還繼續給執行命名,液壓系統將會憋壓(壓力持續提升),壓力達到卸荷壓力設定值,液壓系統就會卸壓,實現液壓系統的自我保護。假定整個垃圾車液壓系統卸荷壓力出廠設置為P1(如16 MPa),根據控制經驗及壓縮力要求,將壓縮循環動作執行到位的判定壓力設為P2(如14 MPa)。因壓力控制方法是對位置控制方法的補充,在動作到位判定壓力P2值的設定上,因遵循P2大于基于位置控制時動作執行到位即將停止的液壓壓力P3(如8 MPa)的原則,但P2須小于等于P1。
壓力控制方法的具體實現方式為:
a.執行刮板打開,刮板打開到位壓力監測值達到P2,則停止執行刮板打開動作,執行下一動作。
b.執行滑板伸出,滑板伸出到位壓力監測值達到P2,則停止執行滑板伸出動作,執行下一動作。
c.執行刮板閉合,刮板閉合到位壓力監測值達到P2,則停止執行刮板閉合,執行下一動作。
d.執行滑板縮回,滑板縮回到位壓力監測值達到P2,則停止執行滑板縮回,單次循環結束;若是連續/多次循環,則不停止壓縮循環,回到第一步,重復循環。
2.3 時間控制方法(M3)
在原有位置控制方法基礎上,不增加任何傳感器,只需在程序里基于壓縮循環4個動作的執行時間,增加4個計時器Timer1~Timer4用于動作到位控制。假定基于位置控制法中,刮板打開動作從起點到傳感器觸發的時間為T1(如6 s);滑板伸出動作從起點到傳感器觸發的時間為T2(如10 s);刮板閉合動作從起點到傳感器觸發的時間為T3(如8 s);滑板收回動作從起點到傳感器觸發的時間為T4(如12 s)。因時間控制方法是對位置控制方法的補充,其4個計時器Timer的設置,應遵循Time1≥T1,Timer2≥T2,Timer3≥T3,Timer4≥T4,這樣才能在(或處于)時間模式下保證壓縮循環各個動作能夠執行到位。
時間控制方法的具體實現方式如下:
a.執行刮板打開,持續的時間達到判定到位計時器Timer1,認為動作到位,停止執行刮板打開動作,執行下一動作。
b.執行滑板伸出,持續的時間達到判定到位計時器Timer2,認為動作到位,停止執行滑板伸出動作,執行下一動作。
c.執行刮板閉合,持續的時間達到判定到位計時器Timer3,認為動作到位,停止執行刮板閉合,執行下一動作。
d.執行滑板縮回,持續的時間達到判定到位計時器Timer4,認為動作到位,停止執行滑板縮回,單次循環結束;若是連續/多次循環,則不停止壓縮循環,回到第一步,重復循環。
3 壓縮循環冗余控制技術實施方案
本技術方案提出的垃圾車壓縮循環的冗余控制方法是以上三種方法的組合,以M1M2M3這種全集組合為例,進行原理闡述。前面提到M1方法優先級最高,M2方法優先級次之,M3方法優先級最低。其執行原理決定了壓縮循環的效率,以表1為例來闡述如何通過參數設置,實現三種控制方法之間的冗余控制。
從表1可以看出,方法M1的效率最高,壓縮循環總時間為36 s,其中各個動作時間為位置開關觸發時的真實時間及壓力,以實車標定為準。基于M1方法控制壓縮循環時,其動作到位時的壓力、耗時均是最低、最小的。而M2、M3根據控制優先級,在M1的壓力、時間參數上進行配置,確保當M1方法失效時,M2優先觸發;M1、M2方法都失效時,M3方法才會觸發。
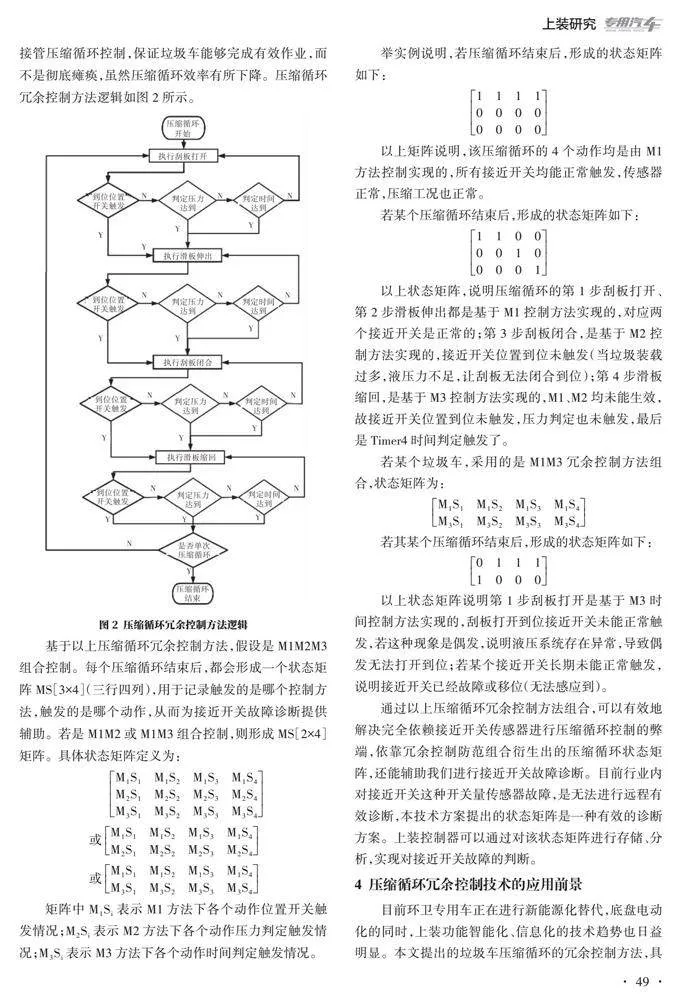
基于以上壓縮循環冗余控制方法,當垃圾車在凌晨作業時,因為接近開關傳感器故障或移位導致無法有效感應位置,M1方法失效時,M2或M3方法仍可以有效接管壓縮循環控制,保證垃圾車能夠完成有效作業,而不是徹底癱瘓,雖然壓縮循環效率有所下降。壓縮循環冗余控制方法邏輯如圖2所示。
以上狀態矩陣,說明壓縮循環的第1步刮板打開、第2步滑板伸出都是基于M1控制方法實現的,對應兩個接近開關是正常的;第3步刮板閉合,是基于M2控制方法實現的,接近開關位置到位未觸發(當垃圾裝載過多,液壓力不足,讓刮板無法閉合到位);第4步滑板縮回,是基于M3控制方法實現的,M1、M2均未能生效,故接近開關位置到位未觸發,壓力判定也未觸發,最后是Timer4時間判定觸發了。
以上狀態矩陣說明第1步刮板打開是基于M3時間控制方法實現的,刮板打開到位接近開關未能正常觸發,若這種現象是偶發,說明液壓系統存在異常,導致偶發無法打開到位;若某個接近開關長期未能正常觸發,說明接近開關已經故障或移位(無法感應到)。
通過以上壓縮循環冗余控制方法組合,可以有效地解決完全依賴接近開關傳感器進行壓縮循環控制的弊端,依靠冗余控制防范組合衍生出的壓縮循環狀態矩陣,還能輔助我們進行接近開關故障診斷。目前行業內對接近開關這種開關量傳感器故障,是無法進行遠程有效診斷,本技術方案提出的狀態矩陣是一種有效的診斷方案。上裝控制器可以通過對該狀態矩陣進行存儲、分析,實現對接近開關故障的判斷。
4 壓縮循環冗余控制技術的應用前景
目前環衛專用車正在進行新能源化替代,底盤電動化的同時,上裝功能智能化、信息化的技術趨勢也日益明顯。本文提出的垃圾車壓縮循環的冗余控制方法,具備多種組合的靈活性、低成本(增加一個壓力傳感器的壓力控制方法)或無成本(時間控制方法)的特點,同時為垃圾車的接近開關傳感器故障診斷提供了一種思路,在新能源壓縮式垃圾車、自裝卸式垃圾車(圖3~圖4)上均能很好地應用,有助于提升新能源垃圾車上裝可靠性和智能化水平。
5 結語
本文針對垃圾車的壓縮循環基于位置控制方法的原理進行了闡述,提出了基于壓力控制方法、時間控制方法的實現模式,并基于上述三種方法以組合的方式實現冗余控制,以一種低成本的方式,有效解決接近開關傳感器失效而引起的上裝壓縮循環功能失效,從而提升垃圾車上裝的可靠性。
參考文獻:
[1]林亮.壓縮式垃圾車壓填循環動作的智能化改進[J].專用汽車,2020(5):86-89.
[2]殷俊.后裝壓縮式垃圾車液壓系統及控制系統設計[J].企業技術開發,2015(5):14-15.
[3]黃有林,李自光,蘇文明.后裝壓縮式垃圾車液壓系統及控制系統設計[J].專用汽車,2011(4):60-62.
作者簡介:
李勝,男,1987年生,工程師,研究方向為整車智能網聯控制技術。