林下三七莖葉采收機設計及往復式割刀仿真試驗
2024-12-31 00:00:00鄭嘉鑫王世順湯凡朱龍圖羅驥楊文彩
中國農業科技導報 2024年9期






摘要:三七屬于長莖稈類作物,莖葉采收是三七收獲的重要環節之一。針對林下三七莖葉采收勞動強度大、缺乏成熟的采收裝置等問題,結合林下三七農藝要求和莖稈力學參數,設計了一種林下三七莖葉采收裝置,主要由控制箱、機架和剪葉裝置組成,確定了整機尺寸、切割行程、前進速度和割幅寬度等參數。對往復式切割器關鍵結構參數的設計主要包括動刀片、定刀片、曲柄連桿機構、護刃器等,能夠滿足三七莖葉不傷苗、不漏割的技術要求。對切割器進行了運動學分析,在切割速度為0. 4~0. 8 m?s?1時,能夠在保證切割效果的同時,還保證整機的穩定性及安全性。構建了三七莖稈和切割刀片的剛柔耦合仿真模型,開展切割刀片仿真分析,將最大切割力作為評價指標,通過三因素三水平試驗可知,影響切割的因素由大到小依次為切割傾角、切割速度、刀具構型,確定了刀型對三七莖稈切割力的降低效果為三角形刀片gt;梯形刀片gt;矩形刀片,三七莖稈-切割刀片的最優參數組合為切割傾角為90.5°、刀型為三角形刀片和切割速度為0.52 m?s?1,此時最大切割力為7.46 N,滿足切割要求。
關鍵詞:三七;莖葉采收裝置;往復式;仿真分析;ANSYS
doi:10.13304/j.nykjdb.2024.0176
中圖分類號:S225 文獻標志碼:A 文章編號:1008‐0864(2024)09‐0072‐11
三七(Panax notoginseng)為百合科多年生草本植物[1],屬于長莖稈類作物,其中莖葉占整株體積的一半以上。三七生長對地域條件極為嚴格,只能在1 300~2 000 m(N23.5)范圍內栽培[2]。近幾年,云南省的三七種植面積逐年擴大,其種植面積約為全國種植面積的95%~98%[3]。隨著中藥材的普及,三七越來越受人們的青睞,三七的莖葉具有較高的經濟與藥用價值,其采收環節直接關乎三七收獲的效率和質量[4-8]。林下三七主要種植在云南昆明、紅河、普洱等地,傳統莖葉采收裝置效率低、人工成本較高,嚴重阻礙云南林下三七采收效率。
莖葉采收是決定三七全程機械化收獲程度的關鍵技術[9],然而目前對于三七收獲機械的研究主要是以根莖類作物收獲技術與裝備[10-15]為基礎,包括溫室與大田2種作業方式,對于林下三七莖葉采收機械鮮有研究。三七每年采收1次,由于三七的種植越來越多,采收困難的問題也越來越凸顯。傳統三七采收方式成本高、效率低,因此,研制一種切割效率高、耗能低的三七采收機具有重要意義。國內外對莖葉類收獲機械的研究相對成熟[16‐17],從依靠人工采收發展為分段收獲機、聯合收獲機收獲[18]。目前,有些國家和地區已基本實現莖葉類蔬菜機械化及智能化收獲[19‐20]。韓國播藍特蔬菜公司發明的小型手扶式莖葉類收獲機,采用往復式切割器定刀與動刀交錯完成切割動作,對于莖葉切割效率高、機具輕便[20‐21];日本川崎公司研發了一款風送式小型葉菜收獲機,可在一定程度上減少葉菜損傷,降低葉菜收獲損傷率,該機適用于三葉草、菊花腦、馬蘭頭等[22]的收獲,盧建強等[23]研制了一款手扶式有序葉菜收獲機,該機采用往復式雙動割刀切割葉菜,對莖葉類蔬菜的剪切效率高。綜上所述,國內外對于莖葉類收獲機的研究較為成熟,可為林下三七莖葉采收的設計提供理論參考。
基于前述研究和關鍵技術,本文設計了一種自走式林下三七莖葉采收裝置,其采用往復式剪切方式,運用ANSYS軟件對林下三七莖葉采收裝置的往復式切割器進行動力學仿真[24],確定往復式切割器的優化工作參數組合,為林下三七莖葉采收裝置設計提供理論依據。
1 材料與方法
1.1 整體結構設計與工作原理
1.1.1 供試材料
本文以云南省昆明市海口林場林下中藥材種植基地的三七作為研究對象,于當年12月至翌年1月,選擇晴朗天氣進行莖葉采收,對象為2 年生及以上的三七。由于三七結構特點,對于莖葉采收有明確要求:用剪刀或剪切工具在距壟面4~8 cm處剪斷三七的莖稈;采收的三七莖葉應放于潔凈衛生的容器中,并及時去除病、殘的三七莖葉;清洗后自然曬干或45~55 ℃烘烤至含水量低于13%。林下三七種植參數如表1所示。
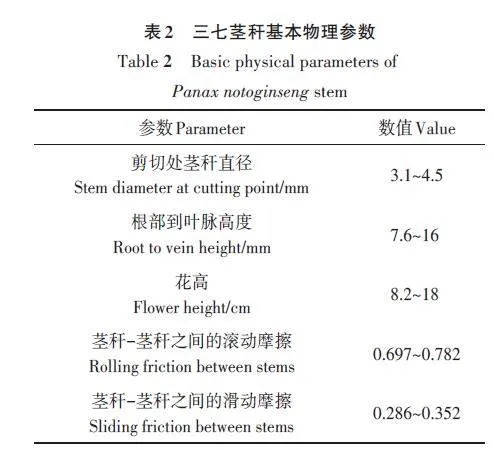
本研究在三七種植地采用隨機取樣方式,共選取5個取樣點,每個取樣點隨機選取25株進行物理參數測定,測量工具有游標卡尺、卷尺及量尺等,各物理參數如表2所示。三七莖葉采收技術要求為:不傷苗、不破壞壟面平整、不損害根部、2年莖葉采收不破壞蔭棚支架。
基于林下三七農藝要求及莖稈的物理參數完成莖葉采收裝置設計。為了驗證切割刀片最優參數,通過仿真試驗選擇三七莖稈采收適宜切割刀片。
1.1.2 整體結構
三七莖葉采收裝置包括控制箱、機架和剪葉裝置,剪葉裝置包括傳送機構、撥葉機構和剪葉機構,如圖1所示。傳送機構傾斜設置,輸出端的下方設置有收集箱;撥葉機構位于傳送機構輸入端的上方;剪葉機構位于撥葉機構的正下方。
1.1.3 工作原理
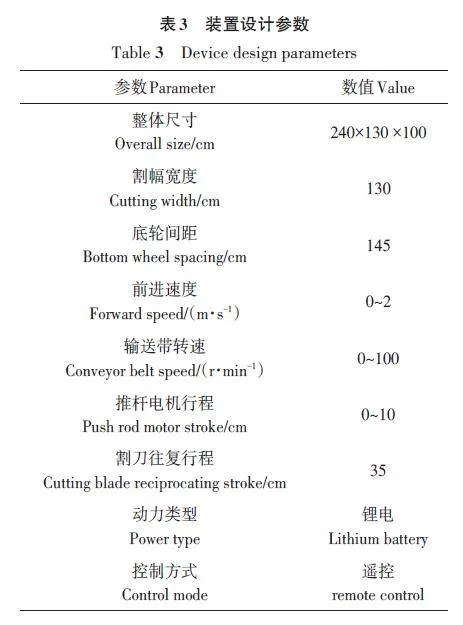
該裝置通過遙控器分別控制轉向、行走和剪葉3個電機,由鋰電池提供電源。林下作業時,啟動遙控開關,控制3個電機的轉動,行走電機通過差速器與液壓配合實現裝置行走,轉向電機通過圓柱齒輪和轉向擋桿配合實現后輪轉向;當裝置進入林下陰棚作業時,啟動剪葉電機開關,帶動剪葉機構中往復切割器的運動及撥禾機構的工作,完成三七莖葉的剪切,被切斷的三七莖葉由撥禾輪撥向傳送帶,由傳送帶將莖葉輸送到收集箱;當收集箱裝滿三七莖葉時,抽拉取下裝滿三七莖葉收集箱,完成1次收獲作業。林下三七莖葉采收裝置主要設計參數如表3所示。
1.2 往復式切割部件的設計與運動分析
1.2.1 往復式切割部件結構設計
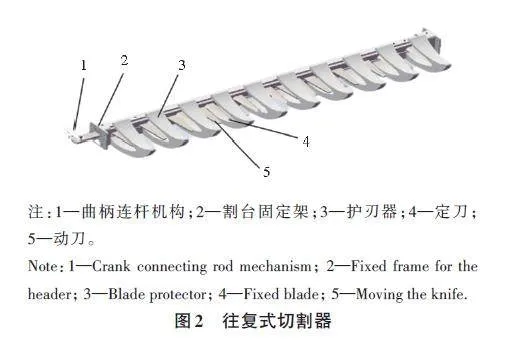
切割部件是三七莖葉采收裝置的核心部件之一,動力齒輪裝配箱中2對圓柱齒輪副和1對圓錐齒輪副將動力傳遞到曲柄連桿。往復式切割器結構如圖2所示,主要包括動刀片、定刀片、曲柄連桿機構、護刃器等。曲柄連桿機構在工作過程中可以實現動刀片的往復運動,定刀片固定于動刀片下方,當動刀片進行往復運動時,二者由于相對運動產生速度差,實現對三七莖稈的剪切。曲柄連桿通過齒輪帶動動刀片相對于定刀片做往復的剪切運動,對三七莖稈進行剪切。
1.2.2 往復式切割部件運動分析
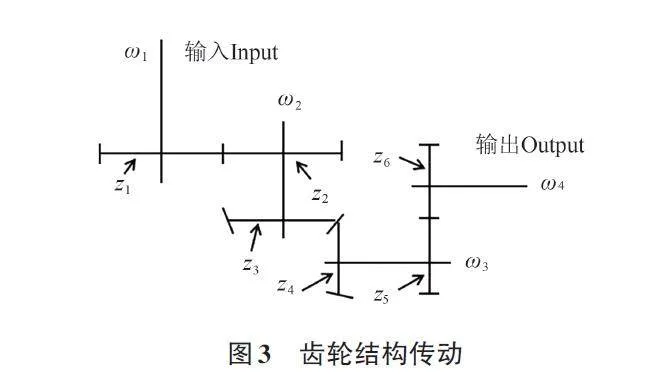
運動副機構簡圖如圖3所示,其中曲柄連桿轉動的角速度(ω4)如公式(1)所示。
ω4 = ω1/i14 = z1 z3 z5 ω1/z2 z4 z6 (1)
式中,i14 為齒輪模數比;z1、z2、z3、z4、z5、z6 為齒輪副的齒輪齒數,其中z1、z2分別34、26個,中心距為45.00 mm;z3、z4 齒數均為26 個,交錯角度為90°;z5、z6 齒數分別為34、17 個;中心距為38.25mm;ω1 為輸入第1對圓柱齒輪角速度,rad?s?1;ω4為曲柄連桿機構轉動角速度,rad?s?1。
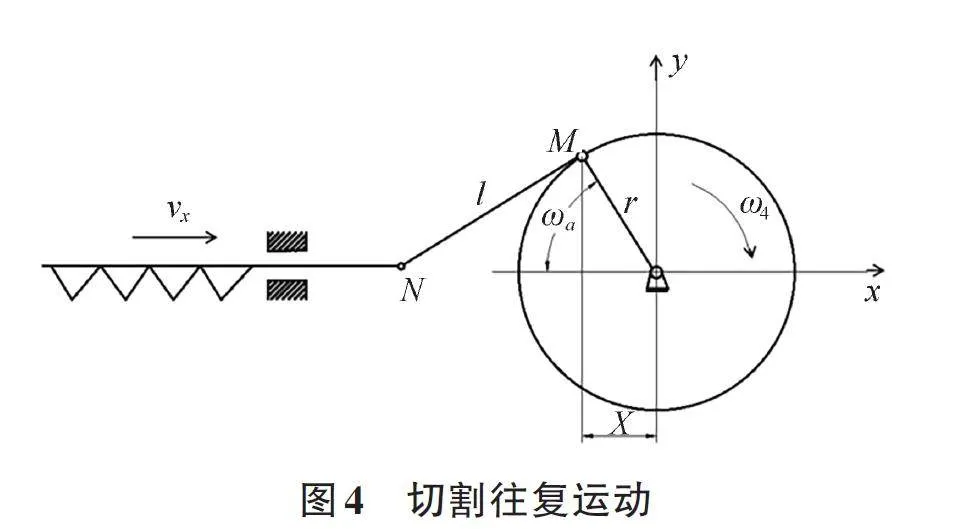
為了更好地分析三七莖葉裝置往復式切割運動過程,將往復式切割器簡化為曲柄連桿機構[25],連桿在曲柄的驅動下做往復直線運動[26‐27]。切割部件的結構如圖4所示,其中動刀片刃口各點往復運動的位移(X)如公式(2)所示。
X = -rcos(ωa )=-rcos(ω4t) (2)
式中,ω4 為曲柄旋轉的角速度,rad?s?1;t 為曲柄由極左點M 起轉過的時間,s。
動刀片往復運動的速度(vx)和加速度(ax)計算公式如下。
由圖4分析可知,動刀片往復運動速度(vx)與位移(X)滿足橢圓方程式(式5)。
vx2/(r2ω42)+X2/r2=1 (5)
動刀片上某點往復運動速度變化規律與橢圓曲線變化規律一致。當X=0時,該點在刀片的重心位置處,此時vx=ω4r,取得最大值;當 X= ± r 時,即當刃口上某點處于刀片極左或極右時,此時vx=0,取得最小值。
由于割刀橫向直線運動速度是變化的,為了滿足ANSYS仿真試驗設計要求,本研究引進割刀平均速度,將割刀平均速度簡化作為切割速度。往復式切割器割運動由水平橫向運動和裝置直線前進運動組成,割刀平均速度(vp)與裝置前進的速度(vm)的配合關系決定了往復式切割器割刀的絕對運動軌跡,用切割進距表示。切割進距為割刀完成1 個行程所用的時間內裝置所前進的距離,其中割刀運動1個行程(2r)的計算公式如下。
vp = PT/= nr/15 (6)
vm = nH/30 (7)
式中,vp為平均速度,vm為前進速度,P 為割刀運動的1個行程,mm;T 為割刀運動1個行程的時間,s;n 為曲柄轉速,m?s?2,H 為切割進距,m。
割刀速比反映林下三七莖葉采收及設計的可行性,與切割莖稈質量、切割平整度和漏割率等主要指標有關。割刀速比越小,漏割部分越多,切割莖葉質量越不平穩;反之,重割部分越多,不能節能減排。
μ = vp/vm (8)
式中, μ 為割刀速比。
根據預實驗,設計vm 為0~2 m?s?1 可調,根據林下莖葉采收裝置工作效率確定vm 為0.4~0.6 m?s?1,為了保證裝置工作的平穩性及操作人員作業安全,割刀速比μ 不宜過大,根據機械行業相關標準[28‐29],μ 取值范圍0.8~1.2,因此得到割刀平均切割速度設計范圍為0.32~0.72 m?s?1。
1.3 基于ANSYS 三七莖稈-切割刀片剛柔仿真分析
1.3.1 仿真試驗參數的測定
在進行ANSYS仿真試驗前,需對各模型進行材料特性填充,參數分別為接觸參數、泊松比、彈性模量和密度。
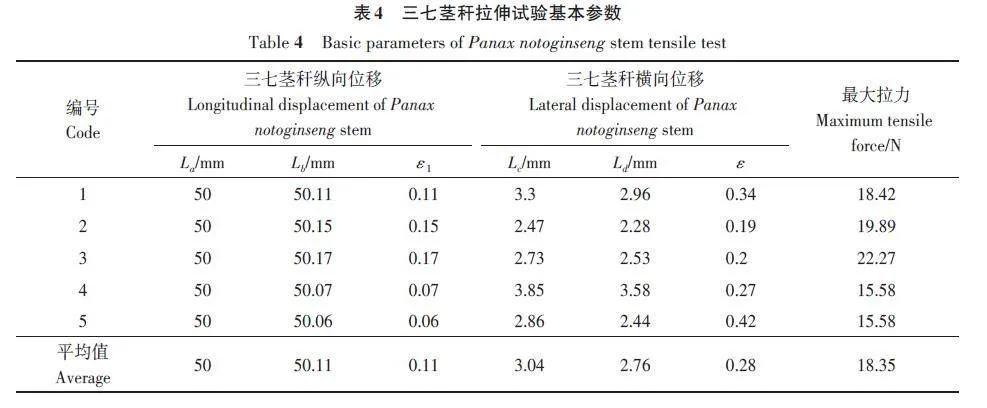
取用根部以上4~8 cm三七莖稈固定于萬能試驗機夾具(WDW-10 10KN微型拉力機,華啟儀器)上,實時記錄拉伸力與徑向位移,三七莖稈徑向拉伸速度設為20 mm?min?1,每次對莖稈持續拉伸3 s后停止,重復5組取平均值。莖稈縱向變形量由萬能試驗機測得,橫向變形量由數顯游標卡尺測得,基本參數如表4所示。三七莖稈泊松比及彈性模量計算公式如下。
φ = ε1/ε = La - Lb/Lc - Ld (9)
式中,φ 為莖稈泊松比;ε1 為水平方向的應變;ε 為載荷方向的應變;La 為莖稈變形前縱向位移,mm;Lb 為莖稈變形后縱向位移,mm;Lc 為莖稈變形前橫向位移,mm;Ld 為莖稈變形后橫向位移,mm。
E = σ/ε= 4F/επd2 (10)
式中,E 為彈性模量,MPa;σ 為正應力,MPa;F 為三七莖稈最大拉力,N;d 為三七莖稈直徑,mm。
將三七莖稈切割成長度為4 cm的小段,采用游標卡尺和天平測定三七莖稈直徑和質量,利用水分測定儀測定三七莖稈的含水率,重復5組試驗取平均值,測得三七直徑為3.57 mm,質量為0.40 g,平均含水率82.34%,三七莖稈密度計算公式如(11)所示。
ρ = m/v= 4m/πrd2h (11)
式中,ρ 為三七莖稈密度,;d 為三七莖稈直徑,mm;h 為三七莖稈長度,cm;m 為三七莖稈質量,g。
采用坡度法測定三七莖稈與切割器之間的接觸參數。測定滑動摩擦時將三七莖稈平行于斜坡放置,確定斜面的傾斜角為36.61°,測定滾動摩擦時三七莖稈垂直于斜坡放置,重復5次取平均值,經測定斜面的滑動和滾動傾斜角分別為36.61°和15.99°,經計算(式12)滑動和滾動摩擦接觸參數分別為0.743和0.287。
β = tana (12)
式中,β 為接觸參數;a 為斜面的傾斜角。
綜上可得三七莖稈和切割器材料的屬性參數平均值,如表5所示。
1.3.2 仿真設計
在ANSYS 中Engineering Data工具欄中新建三七莖稈材料庫,定義三七莖稈為正交各向異性材料,將三七莖稈物理參數(表5)輸入新建材料庫[30-32]。
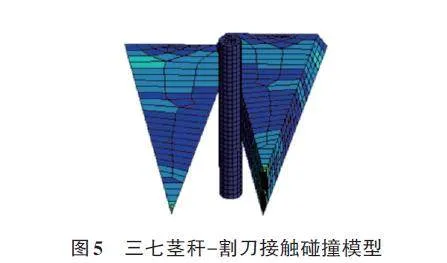
在切割過程中主要是割刀往復切割莖稈的過程,故可以簡化三七莖稈與切割刀片接觸過程。使用SolidWorks 軟件對三七莖稈和切割刀片進行建模,將三七莖稈與切割刀片三維模型導入ANSYS,由于在有限元的計算過程當中,只有網格的節點和單元才能參與計算,在進行顯示動力學模塊分析之前,需要對其進行網格的劃分,可簡化切割模型的網格尺寸[33‐34],建立切割刀片與三七莖稈剛柔仿真模型,如圖5所示。
三七莖稈的根部固定在田間,需要對莖稈的根部施加固定端約束,檔動刀片添加運動約束時,動刀片的往復切割速度基本保持不變,運動方向與三七莖稈垂直,因此,動刀片上所施加的載荷為x 方向的水平恒定速度。隨著切割力的增大會出現三七莖稈剪切破壞[35],導致三七莖稈發生抽芯現象。
1.3.3 最大切割力試驗
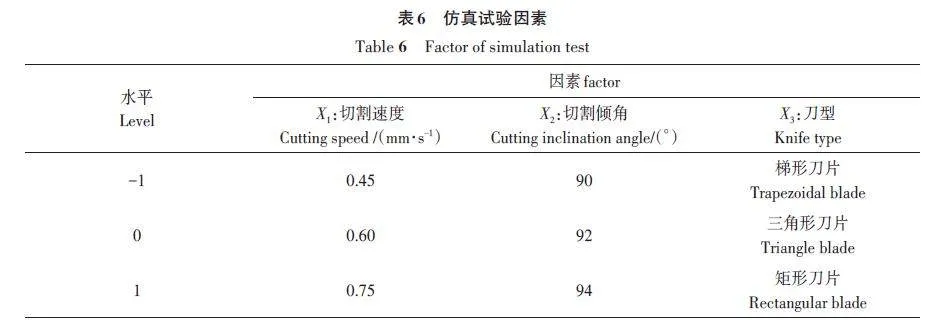
以三七莖稈發生切割破壞時的最大切割力作為評價指標進行試驗設計。將三七莖稈與切割刀片接觸瞬間的相互作用力定義為切割器對三七莖稈的切割力,通過Design-Expert 13軟件探究切割傾角、切割速度和刀型對三七莖稈的影響,切割力作為響應指標,切割傾角90°~94°,切割速度為0.4~0.8 m?s?1,基于現有農具設計了3種刀型,如圖6所示。為探究多因素三七莖稈切割性能的影響,確定三因素三水平試驗因素與水平如表6所示,每組試驗重復5 次,以得到切割刀片工作的最優參數組合。
2 結果與分析
2.1 最大切割力分析
以切割傾角為90°、切割速度0.60 m?s?1、刀型為三角形切割刀片下的接觸碰撞模型為例,將仿真時間設為1 s,對三七莖稈受到的切割力進行分析,結果如圖7所示,當仿真進行到0.004 1 s 時,切割力達到最大,即產生峰值切割力,為10.87 N。
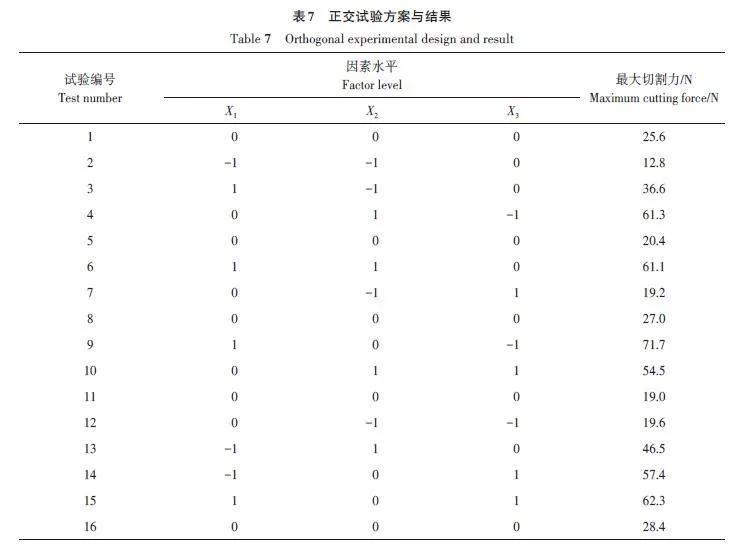
2.2 正交試驗結果分析
通過正交試驗對三七莖稈-切割刀片剛柔耦合模型進行仿真模擬,獲得不同工況下的最大切割力,結果如表7所示。
通過 Design-Expert 13 軟件對仿真數據進行響應面回歸分析,并獲得各影響因素與評價指標間的擬合方程如下。
Y=24.08+12.14X1+16.90X2+2.86X 3-2.30X 1X 2-12.23 X 1X 3-1.60X 2X 3+14.42X 12+0.74X 22+13.82X 32 (15)
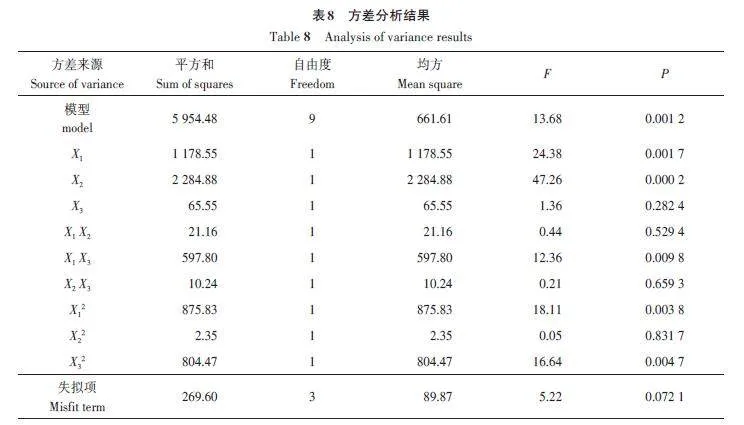
回歸方程方差分析如表8所示,三七莖稈-切割刀片仿真模型值小于0.01,說明回歸方程極顯著,失擬項P 值大于0.05,表明失擬項不顯著,說明該回歸模型擬合程度較好,可用于進行各試驗因素對評價指標的影響分析。
從表8可以看出,除X3、X1X2、X2 X3和X22不顯著外,其余項均顯著。單因素系數代表了因素對評價指標的影響,通過回歸方程可知影響切割的因素由大到小為:切割傾角、切割速度、刀具構型。
2.3 單因素試驗結果分析
單因素試驗對三七莖稈切割力影響如圖8所示,切割速度線性項和平方項、切割傾角的線性項和刀具構型的平方項對于最大切割力的影響顯著,隨著切割速度的增加,最大切割力先減小再增大; 切割傾角與切割力則呈現正相關。當刀型作為影響因素時,對離散點進行分析,當切割速度與切割傾角都處于中心水平時,選用三角形刀片的刀具產生的最大切割力最大,梯形刀片次之,三角形刀片的產生的最大切割力最小。不同刀型對于切割的影響取決于接觸瞬間所處離散點的力學特性和受力情況。
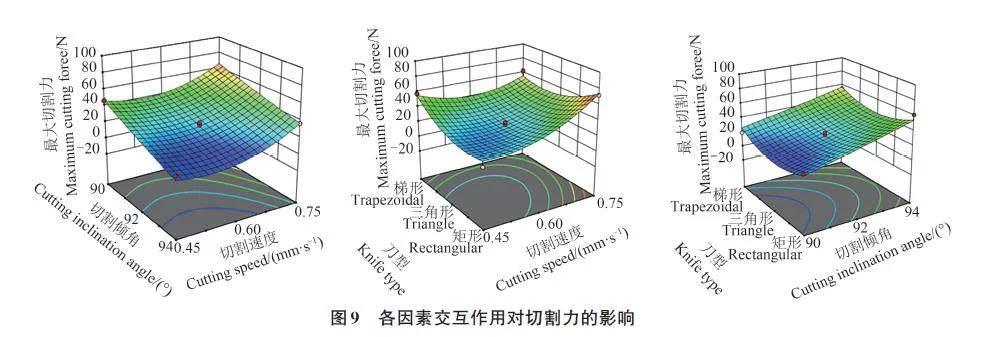
2.4 多因素試驗結果分析
多因素交互作用對切割力影響的響應面如圖9 所示,可以看出,切割力隨切割速度的增大先減小后增大,切割力隨切割傾角增大而增大;切割力隨刀型的改變先減小后增大,切割力隨切割速度增大先減小后增大;切割力隨刀型的改變先減小后增大,切割力隨切割傾角增大而增大。
根據響應面分析結果可知,三角形切割刀片對切割三七莖稈影響顯著效果,三角形切割刀片有效降低了最大切割力,對于降低三七莖稈最大切割力的效果表現為:三角形切割刀片gt;梯形切割刀片gt;矩形切割刀片;其中速度增加有助于最大切割力的降低,其中切割速度為0.6 m?s?1時對三七莖稈切割效率最高;切割傾角對三七莖稈最大切割力影響最顯著,切割傾角為90°時最大切割力最小。
2.5 最優參數結果分析
Design-Expert 13軟件中的后處理模塊,在三因素三水平的基礎上,提取切割力最小時的參數組合,得到三七莖稈?切割刀片的最優參數組合,切割傾角為90.5°、刀型為三角形刀片和切割速度為0.52 m?s?1,此時最大切割力為7.46 N。滿足切割要求。
3 討論
本研究結合林下三七農藝要求、莖稈力學參數以及人工莖葉采收的原理分析,設計了一種林下三七莖葉采收裝置,主要由控制箱、機架和剪葉裝置組成,確定了整機尺寸240 cm×130 cm×100 cm、切割行程為35 cm、前進速度為0~2 m?s?1、割幅寬度為130 cm,結構緊湊,能夠實現三七莖葉采收要求。相較于一般葉菜及中藥材莖葉收獲機械,該裝置利用采用輪距較窄的水稻輪,有效地解決林下蔭棚下行走問題,控制裝置地盤到輪底距離,保證裝置能在壟上工作,設計裝置的整體尺寸在林下三七種植農藝要求參數范圍內,保證林下作業的正常運行。
由于三七莖葉結構特殊,動刀片高速運動容易產生纏繞,影響三七莖稈傳送及喂入割刀,故在切割器外部設置護刃器:一方面可以對三七莖稈進行定位約束,引導三七莖稈喂入割刀;另一方面可以保護三七莖稈,防止對三七莖葉造成機械損傷。對往復式切割器關鍵結構參數的設計,主要包括動刀片、定刀片、曲柄連桿機構、護刃器等。曲柄連桿機構往復運動實現切割刀片對三七莖稈的切割。切割器外部設置護刃器,能夠滿足三七莖葉不傷苗、不漏割莖葉采收技術要求。對切割器進行了運動學分析,確定在切割速度為0.4~0.8 m?s?1時,能夠在保證切割效果的同時還保證整機的穩定性及安全性。為了驗證切割裝置切割效果,構建了三七莖稈和切割刀片的剛柔耦合仿真模型,開展切割刀片仿真分析。將最大切割力作為評價指標,通過三因素三水平試驗結果可知,影響切割的因素由大到小依次為切割傾角、切割速度、刀具構型,確定了刀型對三七莖稈切割力的降低效果三角形刀片gt;梯形刀片gt;矩形刀片,得到三七莖稈-切割刀片的最優參數組合為切割傾角為90.5°、刀型為三角形刀片和切割速度為0.52 m?s?1,此時最大切割力為7.46 N,滿足切割要求,可為后期切割部件的設計提供一定理論參考。
參 考 文 獻
[1] 國家藥典委員會.中華人民共和國藥典(一部)[M].北京:中國醫藥科技出版社,2020:155.
[2] 朱贊,袁希平,甘淑,等.高分1號數據用于云南文山三七種植信息提取[J].浙江農林大學學報,2020,37(1):129-135.
ZHU Z, YUAN X P, GAN S, et al .. GF-1 remote sensing datafor Panax notoginseng planting information extraction inWenshan, Yunnan Province [J]. J. Zhejiang Aamp;F Univ., 2020,37 (1): 129-135.
[3] 史婷婷,張小波,郭蘭萍,等.基于決策樹模型的文山三七種植面積估算方法研究[J].中國中藥雜志,2017,42(22):4358-4361.
SHI T T, ZHANG X B, GUO L P, et al.. Study on extractionmethod of Panax notoginseng plots in Wenshan of Yunnanprovince based on decision tree model [J]. China J. Chin. MateriaMedica, 2017,42 (22): 4358-4361.
[4] 解開婷,張兆國,王法安,等.土壤與三七根莖黏附數學模型構建與驗證[J]. 農業工程學報, 2022, 38(S1): 131-141.
XIE K T, ZHANG Z G, WANG F A, et al.. Mathematical modelconstruction and verification of soil and Panax notoginseng rootadhesion [J]. Trans. Chin. Soc. Agric. Eng., 2022, 38(S1): 131-141.
[5] 張兆國,薛浩田,王一馳,等.基于離散元法的三七仿生挖掘鏟設計與試驗[J].農業機械學報,2022,53(5):100-111.
ZHANG Z G, XUE H T, WANG Y C, et al.. Design andexperiment of Panax notoginseng bionic excavating shovel basedon EDEM [J]. Trans. Chin. Soc. Agric., 2022, 53(5): 100-111.
[6] 張兆國,王法安,張永成,等. 自走式三七收獲機設計與試驗[J].農業機械學報, 2016, 47(S1): 234-240.
ZHANG Z G, WANG F A, ZHANG Y C, et al .. Design andexperiment of self-propelled Panax notoginseng harvester [J].Trans. Chin. Soc. Agric., 2016, 47(S1): 234-240.
[7] 王法安.三七收獲機的設計與試驗研究[D].昆明:昆明理工大學, 2017.
WANG F A. The design and experimental study of Panaxnotoginseng harvester [D]. Kunming: Kunming University ofScience and Technology, 2017.
[8] 張兆國,王一馳,李漢青,等.液壓控制履帶自走式溫室三七收獲機設計與試驗[J].農業機械學報, 2021,52(6):127-135,158.
ZHANG Z G, WANG Y C, LI H Q, et al.. Design and test ofhydraulic control tracked self-propelled greenhouse Panaxnotoginseng harvester [J]. Trans. Chin. Soc. Agric., 2021, 52(6):127-135, 158.
[9] 張兆國,徐紅偉,薛浩田,等.三七莖稈離散元參數標定與試驗[J].農業機械學報,2023,54(11):61-70,91.
ZHANG Z G, XU H W, XUE H T, et al .. Calibration andexperiment of discrete element parameters for Panaxnotoginseng stem [J]. Trans. Chin. Soc. Agric. Mach., 2023,54(11): 61-70,91.
[10] 崔振猛,張兆國,王法安,等.4SD-1700型懸掛式三七收獲機設計與試驗[J] .農機化研究,2019,41(2):134-139.
CUI Z M, ZHANG Z G, WANG F A, et al .. Design and test ofthe 4 SD - 1700 model suspension type Panax notoginsengharvester [J]. J. Agric. Mechanization Res., 2019, 41 (2): 134-139.
[11] 唐金鑫.溫室三七收獲機挖掘裝置優化與土槽試驗[D].昆明:昆明理工大學,2021.
TANG J X. Optimization of excavation device and soil tank testfor greenhouse Panax notoginseng harvester [D]. Kunming:Kunming University of Science and Technology, 2021.
[12] 于進川,張兆國,武占東,等.懸掛式三年生三七挖掘收獲機的研制及試驗[J] .農機化研究,2016,38(4):130-133,164.
YU J C, ZHANG Z G, WU Z D, et al.. Development and testing ofa suspended three-year Panax notoginseng excavator harvester [J].J. Agric. Mechan. Res., 2016,38 (4): 130-133,164.
[13] 趙菲菲.牽引式三七收獲機的設計與試驗研究[D].昆明:昆明理工大學,2016.
ZHAO F F. Design and experimental research of a tractiontype Panax notoginseng harvester [D]. Kunming: KunmingUniversity of Science and Technology, 2016.
[14] 張永成.自走式三七收獲機的設計與試驗研究[D].昆明:昆明理工大學,2016.
ZHANG Y C. Design and experimental research on selfpropelledPanax notoginseng harvester [D]. Kunming: KunmingUniversity of Science and Technology, 2016.
[15] 薛浩田. 三七聯合收獲機整機設計及關鍵部件的仿真試驗[D].昆明:昆明理工大學, 2022.
XUE H T. Complete machine design and simulation test of keycomponents of Sanqi combine harvester [D]. Kunming: KunmingUniversity of Science and Technology, 2022.
[16] 韋勇,秦廣明,金月,等.葉菜收獲機械的研究現狀及發展趨勢[J].農業開發與裝備,2016(8):98-100.
[17] 王俊,杜冬冬,胡金冰,等.蔬菜機械化收獲技術及其發展[J].農業機械學報,2014,45(2):81-87.
WANG J, DU D D, HU J B, et al .. Vegetable mechanizedharvesting technology and its development [J].Trans. Chin. Soc.Agric., 2014, 45 (2): 81-87.
[18] 楊光,肖宏儒,宋志禹,等.葉類蔬菜收獲環節機械化還需跨過幾道坎[J].蔬菜,2018(6):1-8.
[19] 宮元娟,馮雨龍,李創業,等.韭菜收割機械研究現狀及發展趨勢[J].農機化研究,2018,40(10):262-268.
GONG Y J, FENG Y L, LI C Y, et al.. Research actuality of leekharvester and its developing countermeasures [J]. J. Agric. Mechan.Res., 2018, 40 (10): 262-268.
[20] JANG S W, LEE E H, KIM W B. Analysis of research anddevelopment papers of lettuce in Korea [J]. Korean J. Hortic.Sci. Technol., 2007, 25(3): 295-303.
[21] NANG V N, YAMANE S. Development of prototype harvesterfor head lettuce [J]. Eng. Agric. Env. Food, 2015, 8(1): 18-25.
[22] 伍淵遠.溫室芹菜收獲機的設計[D].寧夏:寧夏大學,2018.
WU Y Y. Design of greenhouse celery harvester [D]. Ningxia:Ningxia University, 2018.
[23] 盧建強, 秦廣明, 趙映, 等. 一種蔬菜有序收獲機:CN201410281685.1[P].2016-02-03.
[24] 于英杰,王劍,賴慶輝,等.手持振動梳刷式小粒咖啡采摘裝置設計與試驗[J].農業機械學報,2021,52(9) :124-133.
YU Y J, WANG J, LAI Q H, et al .. Design and experiment ofhand-held vibrating comb-type Coffea arabica L. harvester [J].Trans. Chin. Soc. Agric. Mach., 2021, 52( 9): 124-133.
[25] 史增錄,唐學鵬,鄢金山,等.往復式切割裝置擺環機構的剛柔耦合仿真及分析[J].干旱地區農業研究,2018,36(3):292-296.
SHI Z L, TANG X P, YAN J S, et al.. Rigid-flexible couplingsimulation and analysis of sway ring mechanism in reciprocatingcutting device [J]. Agric. Res. Arid Areas, 2018, 36( 3):292-296.
[26] 鄭永東,岑海堂,張天放,等.向日葵收割裝置的設計與仿真研究[J].中國農機化學報,2017,38(12):1-3,29.
ZHENG Y D, CEN H T, ZHANG T F, et al .. Research progressof domestic and foreign TMR feeding technologies and mixers [J]. J.Chin. Agric. Mechan., 2017, 38(12): 1-3, 29.
[27] 金誠謙,齊彥棟,劉崗微,等.大豆聯合收獲機撥禾輪作用機理分析與參數優化[J].農業機械學報,2023,54(6):104-113.
JIN C Q, QI Y D, LIU G W, et al .. Mechanism analysis andparameter optimization of soybean combine harvester reel [J].Trans. Chin. Soc. Agric. Mach., 2023, 54(6): 104-113.
[28] 張博文,李愛潮,鄭志安,等.川麥冬往復切割式剪果裝置設計與仿真試驗[J].農業機械學報, 2023, 54 (S2):81-90.
ZHANG B W, LI A C, ZHENG Z A, et al.. Design and simulationexperiments of reciprocating cutting tuber temoval device forOphiopogon japonicus [J]. Trans. Chin. Soc. Agric. Mach., 2023,54(S2): 81-90.
[29] 王佳,李紹波,陳春皓,等.葡萄莖稈切割裝置作業參數優化與試驗[J].中國農機化學報,2023,44(2):37-45.
WANG J, LI S B, CHEN C H, et al .. Optimization and test ofoperating parameters of grape stem cutting device [J]. J. Chin.Agric. Mechan., 2023, 44(2): 37-45.
[30] 張克平,黃建龍,楊 敏,等.冬小麥籽粒受擠壓特性的有限元分析及試驗驗證[J].農業工程學報,2010,26 (6):352-356.
ZHANG K P, HUANG J L, YANG M, et al.. Finite element analysisand experimental verification of winter wheat grain compressioncharacteristics [J]. Trans. Chin. Soc. Agric. Eng., 2010, 26(6):352-356.
[31] 崔濤,劉佳,張東興,等.基于ANSYS和ADAMS玉米莖稈柔性體仿真[J].農業機械學報,2012,43 ( Z1):112-115.
CUI T, LIU J, ZHANG D X, et al.. Simulation of corn stemflexiblebody based on ANSYS and ADAMS [J]. Trans. Chin. Soc. Agric.Mach., 2012,43 ( Z1):112-115.
[32] 張榮榮,李小昱,王為,等.基于有限元方法的板栗破殼力學特性分析[J].農業工程學報,2008,24 (9):84-88.
ZHANG R R, LI X Y, WANG W, et al.. Mechanical propertiesanalysis of Chinese chestnut broken shell based on finite elementmethod [J]. Trans. Chin. Soc. Agric. Eng., 2008, 24 (9): 84-88.
[33] 劉兆朋.圓盤式苧麻切割器的設計及試驗研究[D].長沙:湖南農業大學,碩士學位論文,2011.
LIU Z P. Design and experimental study of disc typeramiecutter [D]. Changsha: Hunan Agricultural University,Master Dissertation, 2011.
[34] 李延齡.六面體有限元網格自動剖分技術研究[D].鄭州:機械科學研究院,2002.
LI Y L. Research on automatic meshing of hexahedral finiteelement mesh [D]. Zhengzhou: Zhengzhou Institute of MechanicalScience, 2002.
[35] 陸亮,涂宇.整桿式巨菌草雙圓盤切割裝置動力學研究與參數優化[J].中國農機化學報,2023,44(3);41-48.
LU L, TU Y. Kinetics research and parameter optimization ofthe whole-rod giant Juncao double-disc cutting device [J]. J.Chin. Agric. Mechan., 2023, 44(3):41-48.
基金項目:國家自然科學基金項目(31260425);云南省重大科技專項-生物種業和農產品精深加工專項(202102AE090042-06-04);云南省重大科技專項(202102AA310048);云南省基礎研究專項(202401CF070071)