國內外甘薯移栽機械研究現狀及展望
2024-12-31 00:00:00張秀平徐志杰高清海
農業工程 2024年9期





摘 要: 隨著甘薯產業的發展,機械化水平不斷提高,尤其以耕整地環節發展最快,但移栽機械適用機型的匱乏使移栽環節成為產業發展的瓶頸,嚴重制約了甘薯耕種收綜合機械化發展。簡述了國外甘薯移栽機械主要型式,分析了其作業特點及適用范圍;列舉了國內現有甘薯移栽工具和機械,分析了其結構特點和適用的栽植模式;根據目前國內甘薯栽植新技術,對甘薯移栽機械前沿技術進行了分析;對我國甘薯移栽機械研究重點和發展目標提出建議。
關鍵詞:甘薯;移栽環節;移栽機;種植機械;分苗裝置
中圖分類號:S223 文獻標識碼:A 文章編號:2095-1795(2024)09-0012-07
DOI:10.19998/j.cnki.2095-1795.2024.09.002
0 引言
世界甘薯主要產區分布在北緯40°以南,其中栽培面積以亞洲最多[1-3]。我國是世界上最大的甘薯生產國,種植面積和總產量均居世界首位;甘薯種植除極寒、極旱和土壤過于貧瘠的地區外,其他地區均有分布[4-6]。
我國雖是甘薯生產大國,但其機械化生產技術較落后,甘薯耕種收綜合機械化水平不足30%[7]。特別是移栽環節,除少數地區應用人工輔助喂苗的移栽機進行作業外,大多數地區依靠人工借助簡易工具進行移栽,甚至完全依靠人工作業,機械化水平lt;10%,用工量占整個生產過程的50% 以上,除用工成本逐年增加之外,面臨更嚴峻的問題是目前農村可用勞動力年齡逐年增加、數量逐年減少,嚴重影響了甘薯產業的健康發展,急需高效、適用機型的推廣應用以解決甘薯移栽瓶頸問題。
由于甘薯裸苗(主要是薯塊育苗和大田采苗兩種,以下簡稱薯苗)自身的特殊性狀導致機械化自動快速分苗極其不易,目前世界上所使用的甘薯移栽機均為需要人工輔助喂苗的半自動移栽機械[6]。這類機械作業效率受限于輔助人員喂苗速度,一般單人單行供苗速度30~40 株/min,因此作業效率相對較低。鑒于甘薯種植農藝需求,在現有技術下,利用鴨嘴式、吊籃式移栽機械均難以滿足斜栽、平栽或舟底形移栽對薯苗入土部分所處形態的要求。
1 國外研發進展
甘薯種植面積較大的美國,甘薯移栽機主要向大型化、標準化、智能化方向發展;日本、韓國等由于種植田塊相對較小,甘薯移栽機主要向小型化、自動化方向發展。印度、埃及、尼日利亞等甘薯種植面積排名相對靠前的國家甘薯移栽機發展相對滯后。
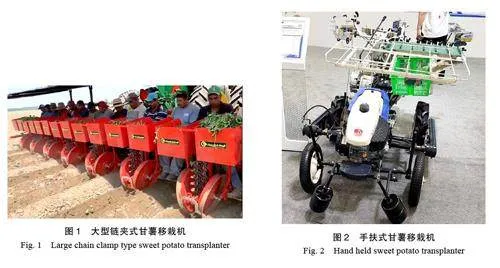
1.1 大型甘薯移栽機械
美國甘薯主產區集中在北卡羅來納州和路易斯安那州等地[2]。依其獨特的大農場生產優勢,研發應用與大型拖拉機配套使用的幾行甚至十幾行大型移栽機械,實現單次多行作業,以提高作業效率,輔以施肥、灌溉等功能,一次性完成整個移栽過程,如圖1 所示。
這類大型甘薯移栽機以鏈夾式為主,一般用于單壟單行移栽模式,每行配備2 名輔助喂苗人員,受限于移栽裝置運動軌跡,一般僅能實現斜栽。開溝裝置在種植壟上劃開種植溝;移栽裝置將薯苗置于種植溝中,覆土鎮壓裝置將種植溝兩側土壤回填并壓實,完成整個移栽過程。其中,移栽裝置通過地輪帶動鏈夾繞軸轉動;輔助喂苗人員手動分苗并將薯苗置于苗夾中;苗夾閉合并將薯苗帶向種植溝,到達最低端時苗夾打開放下薯苗,并以打開形式轉向喂苗處,待輔助人員將薯苗置于苗夾中,進入下一個循環。每個鏈夾軸上設置多個苗夾,轉軸轉動一周完成多株薯苗移栽。
1.2 小型甘薯移栽機械
目前已應用的小型甘薯移栽機械主要以日本生產的手扶式單壟單行移栽機為代表,適用于山地丘陵、平原小地塊等作業面積較小的區域,如圖2 所示。
操作人員將移栽機調整至與栽植壟方向一致后,設置前進方式為定速自走,操作人員跟隨移栽機及時向輸送帶供薯苗,移栽裝置位于機具下方,苗夾取薯苗插苗快速完成,后置壓苗裝置將移栽孔壓實,完成移栽過程。其中,苗夾以張開形式到達取苗位置,快速閉合夾住薯苗,通過向下的運動將薯苗插入土壤,苗夾在土壤中張開并向上提起,將薯苗留在土壤中,苗夾回到取苗位置,進入下一個循環。
該機移栽效率1 700~2 000 株/h(作業效率取決于輔助人員供苗速度)。雖然在移栽深度和角度方面可進行調整,但該機仍僅可實現斜栽。
2 國內研發現狀
目前,除純人工移栽外,我國應用最多的是甘薯栽插器。產品或樣機:國家甘薯產業技術體系與南通富來威農業裝備有限公司合作研發的鏈夾式甘薯移栽機系列、運城市農業機械化科學研究所研制的甘薯苗開穴注水移栽機、山東火絨農業科技發展有限公司生產的帶夾式甘薯移栽機系列、河北省農業機械化研究所有限公司研制的甘薯水平移栽機系列、山東金薯王農業機械制造有限公司研制的鏈式甘薯平臥栽苗機和山東省農業機械科學研究院研制的丘陵山地甘薯膜上仿形扦插移栽機等。
2.1 甘薯栽插器
甘薯栽插器是一種手持式移栽苗夾,移栽作業時,操作人員一手持苗,一手持栽插器手柄,利用栽插器端部凹槽或苗夾將薯苗根部插入土壤,解決了人工插苗對手部的傷損、移栽深度控制等問題。經過多代改進,可實現斜栽或水平移栽,常用形式如圖3 所示。
2.2 甘薯開穴注水移栽機
山西省農業科學院及運城市農業機械化科學研究所共同研制,由懸掛裝置、機架、地輪、破膜開穴注水輪、水箱、注水控制開關、秧苗架和座椅等組成,如圖4 所示[8-9]。主要用于起壟覆膜地塊移栽作業。作業過程中,移栽機用于在地膜上開孔成穴,并向穴孔內注水,解決了傳統人工開孔、灌溉和行走問題,但插秧覆土工作完全由人工完成,兩人共同完成一行移栽,效率較低、勞動強度大。
2.3 鏈夾式甘薯移栽機
較早開展鏈夾式甘薯移栽機研究并進行應用的是南通富來威農業裝備有限公司,借鑒國外甘薯移栽機械技術,在煙草移栽機的基礎上進行甘薯移栽試驗和改進,實現薯苗斜向移栽。“十二五”期間,與國家甘薯產業技術體系合作研發生產了系列鏈夾式甘薯移栽機械,采用模塊化單體移栽結構,實現了從單壟單行到多壟單行(每壟上移栽1 行)的快速增減,如圖5 所示。 集壟上開溝、移栽、覆土和鎮壓功能于一體,行距、株距、移栽深度均可調整。
該系列移栽機對移栽前制備的栽植壟壟距和直線度要求相對較高,作業后需要及時灌溉。在使用中發現上述問題后, 逐步進行優化改進, 增加了起壟(或旋耕起壟)、施肥、鋪滴灌帶(或澆灌)等功能或部分功能的復式移栽機,如圖6 所示。目前已有更多企業參與到此類機械的研制生產。
鏈夾式甘薯移栽機以開溝覆土的方式進行移栽,為避免對地膜的破壞,使其僅能用于未覆膜地塊使用;若移栽后覆膜,則還需要人工破膜掏苗覆土,效率低、用工多。因此,這類甘薯移栽機一般用于非覆膜地塊壟上單行斜向移栽。
2.4 帶夾式甘薯移栽機
較早開展帶夾式甘薯移栽機研究并形成產品的是山東火絨農業科技發展有限公司。借鑒日本小型甘薯移栽機技術,研制帶夾式甘薯復式移栽機,如圖7 所示。拖拉機帶動移栽機,施肥、起壟(或旋耕起壟)、鋪設滴灌帶(或澆灌)、覆膜、移栽和壓苗一次完成。輔助喂苗人員將薯苗分開并逐一放置在輸送帶相應苗位,通過輸送帶將薯苗輸送至底部取苗位,苗夾從取苗位處將薯苗夾住并插入土壤,苗夾運動軌跡決定薯苗移栽形式(斜向移栽、舟底形移栽或水平移栽),目前試驗機具為斜向移栽形式。
帶夾式甘薯移栽機采用扦插鉗插苗方式移栽,可實現不覆膜起壟移栽或起壟覆膜破膜移栽作業。通過調整限深輪高度調整移栽深度,由于輸送帶長和取苗位均固定,因此在株行距調整方面受限。
2.5 甘薯水平移栽機
近年來,鮮食型甘薯消費比例呈逐年增加的趨勢[10]。鮮食型甘薯對薯形要求相對較高,因此,鮮食型甘薯的栽植一般采用舟底形移栽或水平移栽形式。河北省農業機械化研究所有限公司開展了甘薯水平移栽機的研究,已有雙壟單行(一次起兩壟,每壟栽1 行)甘薯水平移栽機和單壟雙行甘薯復式移栽機兩種型號產品,如圖8 和圖9 所示。
雙壟單行甘薯水平移栽機適用于起壟、起壟覆膜或平作種植的甘薯秧苗移栽,可以一次完成薯苗水平扦插、鎮壓作業。地輪驅動扦插鉗控制盤及薯苗輸送裝置,限深輪及調平裝置調整移栽深度。主要特點是同軌道多扦插鉗同步控制,取苗、夾持輸送、水平扦插和同孔返回連續完成;水平仿形扦插,扦插鉗原(同)孔進出,壟面(地膜)開孔小,更利于土壤同步壓實、保墑,促進多薯塊均勻生長。
在雙壟單行甘薯水平移栽機的基礎上,增加移栽前的施肥和耕整地功能,并優化輸送苗機構,形成了單壟雙行甘薯復式移栽機,可一次完成施肥、旋耕起壟、鋪設滴灌帶、覆膜、膜上條帶覆土、膜上水平扦插移栽及鎮壓作業。主要特點是將原來的2 人為1 行供苗,提升為1 人為2 行供苗,有效減少了輔助喂苗人員數量。
水平移栽機以機械方式代替了人工水平扦插,提高了行距、株距、移栽深度一致性,并逐漸形成系列產品。但受限于人工輔助喂苗頻率,機具作業效率仍難以得到顯著提升。
2.6 鏈式甘薯橫向平臥移栽機
根據甘薯橫栽農藝技術,山東金薯王農業機械制造有限公司推出一款鏈式甘薯橫向平臥移栽機,如圖10 所示,可一次完成施肥、旋耕起壟、壟上橫向平臥放苗、上土埋苗、鎮壓和鋪設滴灌帶等作業。人工分苗并擺放在薯苗輸送鏈上,輸送鏈將薯苗依次運送到接近壟頂處放下,側方上土裝置將土壤拋送至壟頂之上為薯苗覆土,僅留端部3~5 葉在壟側外,實現甘薯橫向平栽。
該機用于甘薯不覆膜移栽作業,薯苗放置方向與機具前進方向垂直,結構相比扦插移栽簡單,作業效率及漏栽率仍受輔助喂苗人員供苗情況限制。
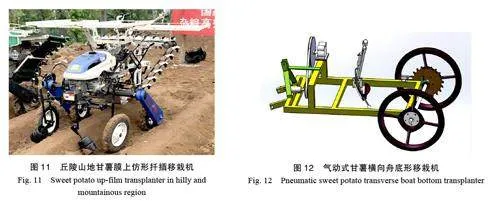
2.7 丘陵山地甘薯膜上仿形扦插移栽機
借鑒日本小型甘薯移栽機技術,山東省農業機械科學研究院研制成功了適用于丘陵山地使用的甘薯膜上仿形扦插移栽機,如圖11 所示。在植苗裝置轉速40~50 r/min 時,對黃淮海地區常用薯苗的取苗率在99% 以上,薯苗栽植后與地面平均夾角53.8°,符合斜向移栽要求[11]。前置式仿壟形行走控制裝置,保證機具行走方向始終與壟向一致。
該機解決了丘陵山地甘薯移栽機械化問題,但作業效率與操作人員行走速度及擺放苗速度有關,仍存在較大提升空間。
3 研究進展
除上述移栽機產品外,通過調研走訪、查閱資料等方式,對目前同步開展的多種形式甘薯移栽機械相關技術研究進行了分析。
3.1 氣動式甘薯移栽機
鄭州科技學院車輛與交通工程學院延伸現有的半自動化秧苗插扦機構,設計了甘薯秧苗氣動扦插裝置控制系統[12]。控制系統采集驅動地輪上遮光盤脈沖信號,從而控制氣動扦插裝置動作。
河北省農業機械化研究所有限公司聯合河北省雄縣義成農機具廠共同設計了氣動式甘薯橫向舟底形移栽機,如圖12 所示。采用氣動推拉桿結構,通過氣缸帶動插苗桿,株距控制由地輪帶動齒圈,齒圈連接行程開關,每轉動一個齒,行程開關傳遞一個信號,氣缸伸出一次,進行一次插秧。
3.2 甘薯苗帶(苗盤)移栽機
甘薯苗帶移栽機是在移栽前對薯苗進行預處理,將薯苗固定在一定寬度、具有黏性的條帶上,或通過編織方式利用可降解繩將薯苗按株距要求等距固定,并卷成盤狀,然后利用可對苗帶(苗盤)進行栽植的機械將連續不斷的薯苗栽入土壤。
北京市農林科學院智能裝備技術研究中心聯合江蘇大學農業工程學院共同開展了基于預處理苗帶甘薯裸苗自動移栽機的研究。通過建立薯苗觸地彎曲與苗根運動的數學模型對薯苗栽植過程進行運動學分析,苗帶端部從喂苗裝置脫離經導向裝置進入移栽裝置的撓性圓盤,繞行圓盤轉動,將苗帶輸送到地面栽植溝內并釋放;同時,在預處理苗帶喂苗裝置和撓性圓盤栽植裝置基礎上設計了一種甘薯裸苗自動移栽機,機具將苗盤上的苗帶通過撓性圓盤栽入壟頂,然后覆土鎮壓,實現甘薯苗帶順壟類水平移栽[13-14]。當移栽株距確定為25 cm,作業速度0.25 m/s 時作業性能最優。
安徽農業大學工學院聯合安徽省農業機械試驗鑒定站等單位共同開展了線式供苗全自動甘薯移栽機的研究[15]。先將薯苗用線繩固定并以打捆的方式儲存在圓盤式苗盤上,在作業時,引出膠帶夾住線式薯苗并輸送至開溝器入口,在重力及線繩作用下,薯苗落入栽植溝內,兩側覆土鎮壓,實現薯苗順壟斜向移栽。
河北省農業機械化研究所有限公司針對甘薯覆膜移栽過程中對地膜的破壞及現有甘薯移栽機作業效率低等問題,提出一種分體覆膜移栽方式,即覆膜、栽苗、覆土、再覆膜和覆土,并設計了一種基于紅薯苗成卷的分體覆膜播苗機[16-17]。施肥、起壟并壟側覆膜,然后播苗機構將苗卷(由連接線串聯間隔設置的薯苗卷繞而成)卷盤上的薯苗鋪放在壟頂栽植區內,可同步鋪設滴灌帶,隨后苗上覆土、覆膜、鎮壓,完成移栽過程,如圖13 所示。該機可進行單壟單行、單壟雙行移栽,作業完成后,薯苗在土壤中姿態與壟頂栽植區斷面一致(可實現斜向移栽、舟底形移栽、水平移栽等),苗向可為橫向或與壟向呈一定角度分布。
3.3 甘薯移栽機關鍵機構部件研究
海南大學機電工程學院、信息與通信工程學院共同對甘薯水平移栽機構優化問題開展研究[18]。以平面四連桿機構為基礎建立水平栽插機構運動數學模型,確定各桿長度和主要角度,并利用EDEM-ADAMS 進行移栽過程仿真試驗,在前進速度0.22 m/s、安裝高度181 mm 時,薯苗移栽深度和姿態合格率均在90% 以上,滿足水平栽植農藝要求。
山東農業大學針對薯苗自動分苗技術,提出一種振動式甘薯裸苗自動有序分苗裝置[19] 和一種振動氣吸式甘薯裸苗自動分苗裝置[20]。前者的振動裝置為分苗裝置提供振動源,薯苗經凸點板、褶皺板、壓板后經改向滑板改變方向后進入分苗器,然后在重力和振動雙重作用下滑落至輸送膠帶分隔槽中;后者采用振動加氣吸的方式,薯苗從苗箱出口處滑落至氣吸式傳送帶卡槽內,苗刷將多余薯苗阻攔使其逐一進入后續卡槽內,氣吸裝置通過卡槽內的吸氣孔將薯苗吸住,實現薯苗的分離。這兩種方式在理論上可行,但并未形成可用實體。
河北省農業機械化研究所有限公司為解決薯苗苗帶(苗盤)制作問題,開展了排苗縫紉成卷機研究[21]。上苗裝置將薯苗分開并置于輸送帶上,輸送帶帶動薯苗至縫紉機構處,進行打結固定,形成苗帶,然后卷繞成卷,如圖14 所示。同時,為研究薯苗自動分苗技術,提出了滾筒式、平板式自動分苗方案,如圖15 所示。滾筒式自動分苗裝置的滾筒軸上均布多個分苗齒盤,分苗齒盤上根據薯苗根部和頂部粗細不同,開設不同尺寸卡槽,在滾筒軸轉動的同時,將薯苗分開,試驗過程中由于轉速、卡槽位置和大小、分苗齒盤數量匹配問題導致薯苗損傷率高。平板式自動分苗裝置利用振動產生位移原理,在不同位置設置不同頻率、不同振幅振動電機,同時平板各方向傾斜角度可調,在此基礎上進行反復試驗,以尋求最優配置方案。
4 結束語
在甘薯機械化生產技術完善提升方面,打破機械化移栽瓶頸問題,需要統籌農機、農藝技術融合點,同時,融匯多學科理論,以簡單、實用為目標,開展薯苗自動分離技術研究。
(1)宜機化農藝技術的優化完善。在自動分苗技術尚未成熟之前,受人工供苗速度限制,機械移栽效率難有顯著提高。宜在農藝技術方面進行宜機化改進,一是在田間移栽前,先將薯苗進行預處理,使之成為便于移栽的形式(苗帶或苗盤等),薯苗預處理場地可為廠房或某些固定場地,預處理操作人員集中作業,可降低輔助人員勞動強度,同時提高田間移栽作業效率。二是對薯苗進行預篩分,將適于機械化移栽的品相直、直徑粗細均勻的薯苗多余莖葉去除,便于移栽機取苗器取苗,可降低漏栽率。
(2)宜機化品種選育。薯苗形態是影響自動分苗的關鍵因素之一,選育適宜機械化分苗、移栽的品種,對實現機械化高效移栽具有重要意義。
(3)薯苗自動分離技術研究。無論是薯苗預處理后移栽,還是直接機械移栽,均需要對薯苗進行分離處理,因此薯苗自動分離技術是決定甘薯移栽效率的關鍵因素。融合機械、電氣、液壓、信息、仿生和人工智能等多學科技術,攻克甘薯裸苗自動分離難題,提高機械化移栽作業效率和質量。
參考文獻
[1]周洵澤,嚴偉,王云霞,等.甘薯機械化移栽分苗取苗技術研究現狀及展望[J].中國農機化學報,2023,44(3):35-40.
ZHOU Xunze, YAN Wei, WANG Yunxia, et al. Research status and prospect of sweet potato mechanized transplanting technology[J]. Journal of Chinese Agricultural Mechanization, 2023, 44( 3) :35-40.
[2]嚴偉,張文毅,胡敏娟,等.國內外甘薯種植機械化研究現狀及展望[J].中國農機化學報,2018,39(2):12-16.
YAN Wei,ZHANG Wenyi,HU Minjuan,et al.Present situation of research and expectation on plant mechanization of sweet potato in China and abroad[J]. Journal of Chinese Agricultural Mechanization, 2018,39(2):12-16.
[3]馬代夫,李強,曹清河,等.中國甘薯產業及產業技術的發展與展望[J].江蘇農業學報,2012,28(5):969-973.
MA Daifu, LI Qiang, CAO Qinghe, et al. Development and prospect of sweet potato industry and its technologies in China[J].Jiangsu Journal of Agricultural Sciences,2012,28(5):969-973.
[4]趙海,劉新鑫,潘志國,等.甘薯種植農藝及機械化種植技術研究[J].中國農機化學報,2021,42(6):21-26.
ZHAO Hai, LIU Xinxin, PAN Zhiguo, et al. Agronomic characteristics and mechanized planting technology of sweet potato[J]. Journal of Chinese Agricultural Mechanization,2021,42(6):21-26.
[5]范澤民,陳衛,劉新亮,等.壓苗式甘薯移栽機研制探討[J].中國農機化學報,2018,39(11):1-3,16.
FAN Zemin, CHEN Wei, LIU Xinliang, et al. Discussion on transplanting machine of sweet potato by pressurizing seedlings[J]. Journal of Chinese Agricultural Mechanization,2018,39(11):1-3,16.
[6]朱斌彬,呂釗欽.帶夾式甘薯裸苗移栽機的設計[J].農機化研究,2018,40(6):120-123,161.
ZHU Binbin, LV Zhaoqin. Design of transplanting machine for nude seedling with belt[J].Journal of Agricultural Mechanization Research,2018,40(6):120-123,161.
[7]高清海,袁興茂,陳敬者,等.河北省甘薯種植及其生產機械現狀與發展建議[J].河北農業科學,2018,22(4):72-75,100.
GAO Qinghai,YUAN Xingmao,CHEN Jingzhe,et al.Current situation and development suggestions of sweet potato planting and its production machinery in Hebei Province[J]. Journal of Hebei Agricultural Sciences,2018,22(4):72-75,100.
[8]王彩賢.甘薯苗開穴注水移栽機的研制與試驗[J].中國農機化學報,2014,35(4):17-21.
WANG Caixian. Development and experiments of opening hole-watering injection transplanting machine for sweet potato seedlings[J].Journal of Chinese Agricultural Mechanization,2014,35(4):17-21.
[9]周藝.甘薯苗開穴注水移栽機設計與試驗[J].農業工程,2016,6(6):113-116.
ZHOU Yi.Design and experiment on opening cavities and water injection transplanting machine for sweet potato seedlings[J]. Agricultural Engineering,2016,6(6):113-116.
[10]謝一芝,邊小峰,賈趙東,等.中國鮮食甘薯產業發展現狀及其發展前景[J].江蘇農業學報,2022,38(6):1694-1701.
XIE Yizhi, BIAN Xiaofeng, JIA Zhaodong, et al. Development status and prospect of fresh sweetpotato industry in China[J]. Jiangsu Journal of Agricultural Sciences,2022,38(6):1694-1701.
[11]李慧,何騰飛,劉虎,等.丘陵山地甘薯膜上仿形扦插移栽機研制[J].農業工程學報,2023,39(16):26-35.
LI Hui,HE Tengfei,LIU Hu,et al.Development of the profiling upfilm transplanter for sweet potato in hilly and mountainous region[J]. Transactions of the Chinese Society of Agricultural Engineering,2023,39(16):26-35.
[12]楊幸運,都興隆,劉巖.甘薯秧苗氣動扦插裝置控制系統設計[J].鄉村科技,2021,12(10):123-124.
[13]何宇凡,叢岳,顏丙新,等.基于撓性圓盤的甘薯裸苗類水平栽植運動分析與試驗[J].中國農業大學學報,2022,27(11):187-196.
HE Yufan, CONG Yue, YAN Bingxin, et al. Kinematics analysis and experiment of horizontal planting of sweet potato naked seedlings based on flexible disc[J]. Journal of China Agricultural University, 2022,27(11):187-196.
[14]武廣偉,安曉飛,顏丙新,等.基于預處理苗帶甘薯裸苗自動移栽機設計與試驗[J].農業機械學報,2022,53(S1):99-109.
WU Guangwei,AN Xiaofei,YAN Bingxin,et al.Design and experiment of automatic transplanter for sweet potato naked seedlings based on pretreatment seedling belt[J]. Transactions of the Chinese Society for Agricultural Machinery,2022,53(S1):99-109.
[15]張永政,曹成茂,秦寬,等.線式供苗全自動甘薯移栽機設計與試驗[J].智能化農業裝備學報(中英文),2022,3(2):28-36.
ZHANG Yongzheng,CAO Chengmao,QIN Kuan,et al.Design and experiment of automatic sweet potato transplanter with linear seedling supplying[J].Journal of Intelligent Agricultural Mechanization,2022,3(2):28-36.
[16]石家莊市薯大郎農業科技有限公司,河北省農業機械化研究所有限公司.一種紅薯覆膜種植方法及種植設備:CN202210130670.X[P].2022-04-26.
[17]河北省農業機械化研究所有限公司,石家莊市薯大郎農業科技有限公司. 一種基于紅薯苗成卷的分體覆膜播苗機:CN202210-561486.0[P].2022-09-13.
[18]張云鵬,譚芊,許鵬,等.基于EDEM-ADAMS 的甘薯水平移栽機構優化設計[J/OL].中國農機化學報:1-8.http://kns.cnki.net/kcms/detail/32.1837.S.20230928.1701.004. html.
ZHANG Yunpeng, TAN Qian, XU Peng, etal. Optimization design of sweet potato horizontal transplanting mechanism based on EDEMADAMS[J/OL]. Journal of Chinese Agricultural Mechanization: 1-8.http://kns.cnki.net/kcms /detail/32.1837.S.20230928.1701.004.html.
[19]山東農業大學. 振動式甘薯裸苗自動有序分苗裝置:CN202021177205.4[P].2021-01-12.
[20]山東農業大學. 一種振動氣吸式甘薯裸苗自動分苗裝置:CN201911109893.2[P].2020-01-10.
[21]石家莊市薯大郎農業科技有限公司,河北省農業機械化研究所有限公司.排苗縫紉成卷機:CN202210130665.9[P].2022-05-13.