大豆收獲機清選損失籽粒分布規律研究
2024-12-31 00:00:00唐小涵宋麗于洪杰王軍趙栗陶可瑞
鄉村科技 2024年11期
摘 要:為提高大豆收獲機籽粒清選損失檢測準確率,研究了清選損失籽粒的分布規律,確定了各因素對清選損失籽粒分布規律的影響,找到清選損失籽粒檢測傳感器的安裝位置及角度,提高了清選損失檢測的準確性、科學性。高速攝影試驗表明,風門開度、魚鱗篩開度和振動篩頻率等參數對損失籽粒分布規律無顯著影響。
關鍵詞:大豆籽粒;清選損失;分布規律;高速攝影
中圖分類號:S226.5 文獻標志碼:B 文章編號:1674-7909(2024)11-152-3
DOI:10.19345/j.cnki.1674-7909.2024.11.035
0 引言
隨著我國大豆收獲機械化水平的日益提高,相關企業對大豆收獲機清選損失在線檢測的需求也日益增強。目前,我國大部分聯合收獲機通過安裝傳感器來檢測清選損失情況。目前,我國對清選損失籽粒分布規律的研究還處于起步階段,清選損失籽粒檢測傳感器的安裝位置及角度尚不明確,導致檢測結果不準確[1],因此有必要對清選損失籽粒分布規律進行研究。針對大豆聯合收獲機清選損失籽粒分布不明確的情況,在自行研制的高速攝影試驗臺上進行了清選損失籽粒分布規律的高速攝影試驗,分析了清選損失籽粒在不同參數情況下的分布規律,為大豆收獲機清選損失籽粒檢測傳感器安裝位置及角度的確定提供數據參考。
1 高速攝影試驗臺設計及其工作原理
1.1 高速攝影試驗臺設計
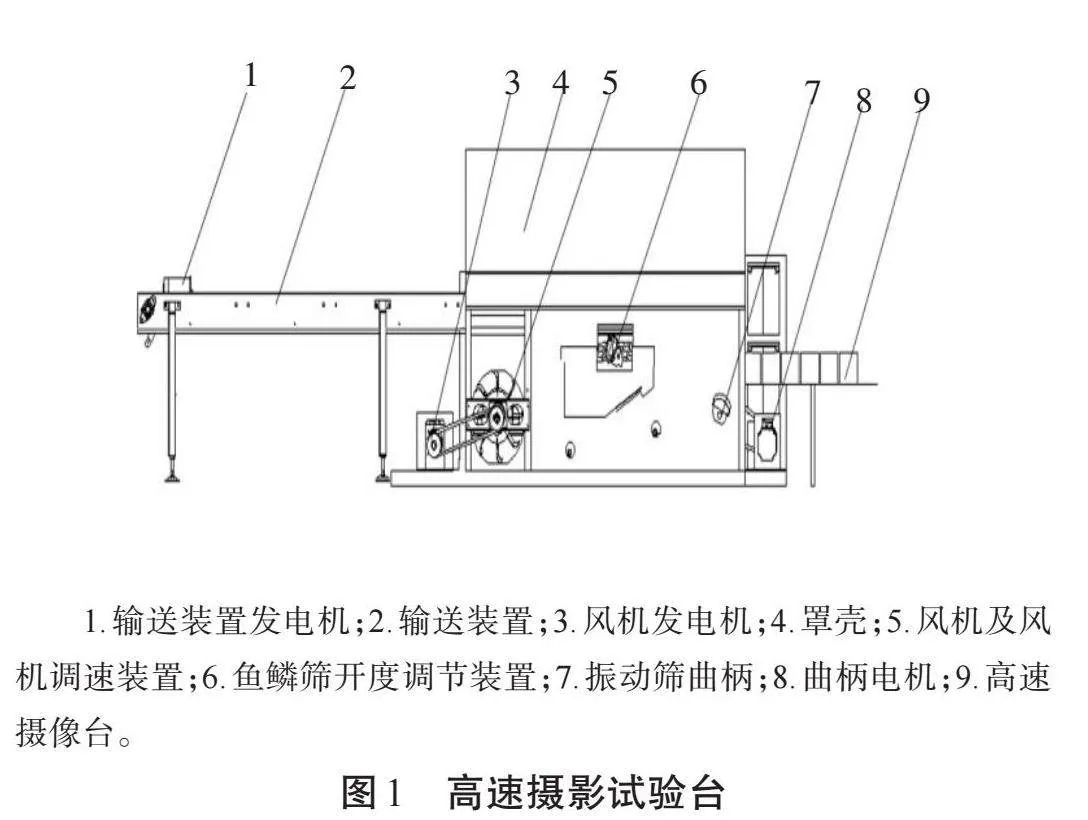
為準確檢測大豆收獲機作業過程中的大豆籽粒清選損失情況,研究清選損失大豆籽粒在清選排出后的分布規律,在大豆收獲機風篩式清選裝置基礎上設計了高速攝影試驗臺,分別獨立設計了風機調速裝置、振動篩曲柄及魚鱗篩開度調節裝置,以實現風篩式清選裝置清選作業參數的自動化調整[2-3],并在清選篩后方設置高速攝像機進行拍攝。高速攝影試驗臺如圖1所示。
1.2 高速攝影試驗臺工作原理
將稱量好的大豆脫粒混合物料均勻鋪放到輸送帶上,使其隨輸送帶勻速運動;大豆脫粒混合物料掉落到抖動板上,由抖動板落到上、下篩,振動篩不斷進行往復運動;大豆脫粒混合物料持續由抖動板輸送到魚鱗篩,在風機經風道形成的氣流場與振動篩往復運動的共同作用下,對脫粒混合物完成均勻分攤、疏松、分離和透篩;脫粒混合物中碎豆莢、莖稈等雜余被吹出機外,但也有少數的大豆籽粒夾雜在雜余中一起被吹出機外[4-6]。大部分干凈的大豆籽粒透過振動篩落下。排出機外的拋出物被高速攝像機所拍攝。試驗結束后,分別對高速攝像機拍攝的大豆籽粒進行捕捉分析。調控裝置可對風機轉速、振動篩頻率、魚鱗篩開度進行調整,探究各清選參數對清選損失籽粒分布規律的影響。
2 清選損失籽粒分布規律檢測臺架試驗
2.1 試驗設備及其參數
試驗設備由高速攝影機、鏡頭、計算機、電源適配器、多功能線纜、以太網數據線纜、PCC軟件、三角架云臺、高亮度大燈等組成。其中,高速攝影機采用美國Vision Research公司生產的100萬像素級Phantom ? VEO 410高速攝像機。該攝像機在滿幅狀態下的拍攝速率為5 200幀/s,拍攝速率最大為650 000幀/s,具有超高靈敏度,無圖像滯后現象,能有效避免眩光和強光對成像的影響。
為保證能夠較好地獲取拍攝圖像,拍攝過程中使用高亮度大燈進行補光,確保高速攝影機的進光量,并將高速攝影機調至較低分辨率和色彩辨識度,從而獲得清晰圖像和較短曝光時間。
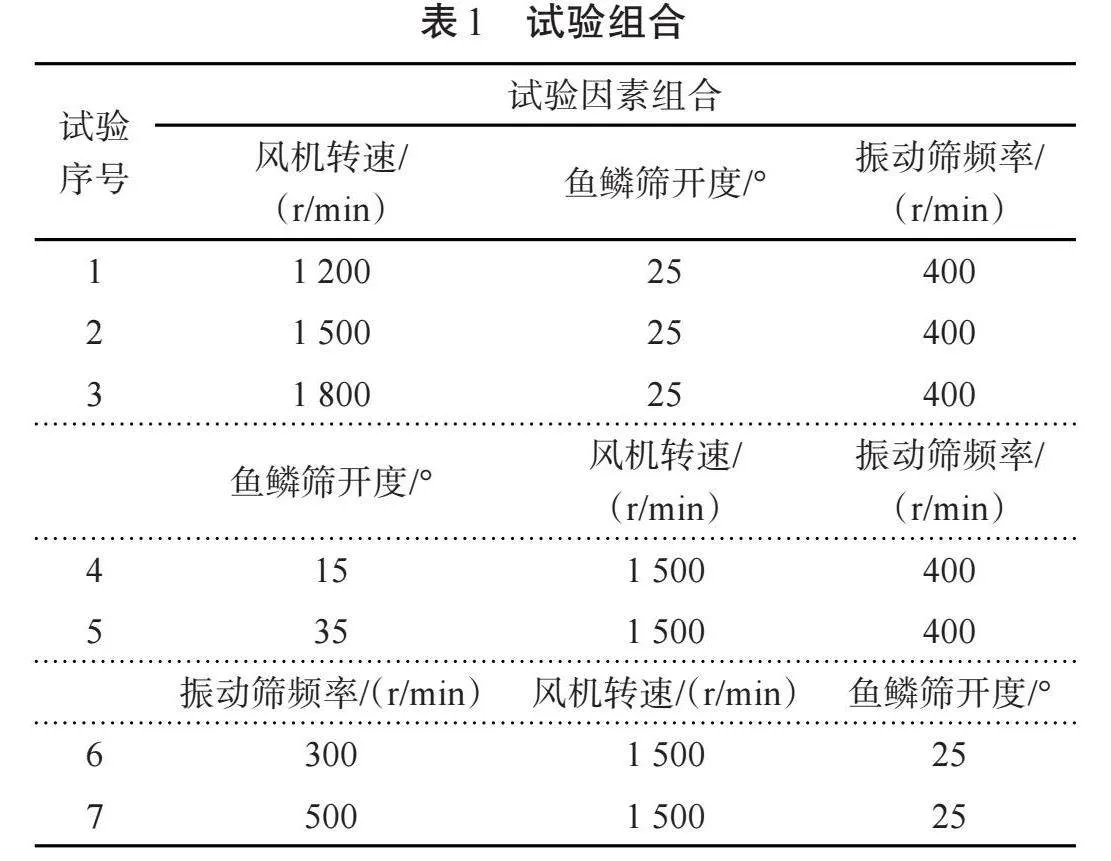
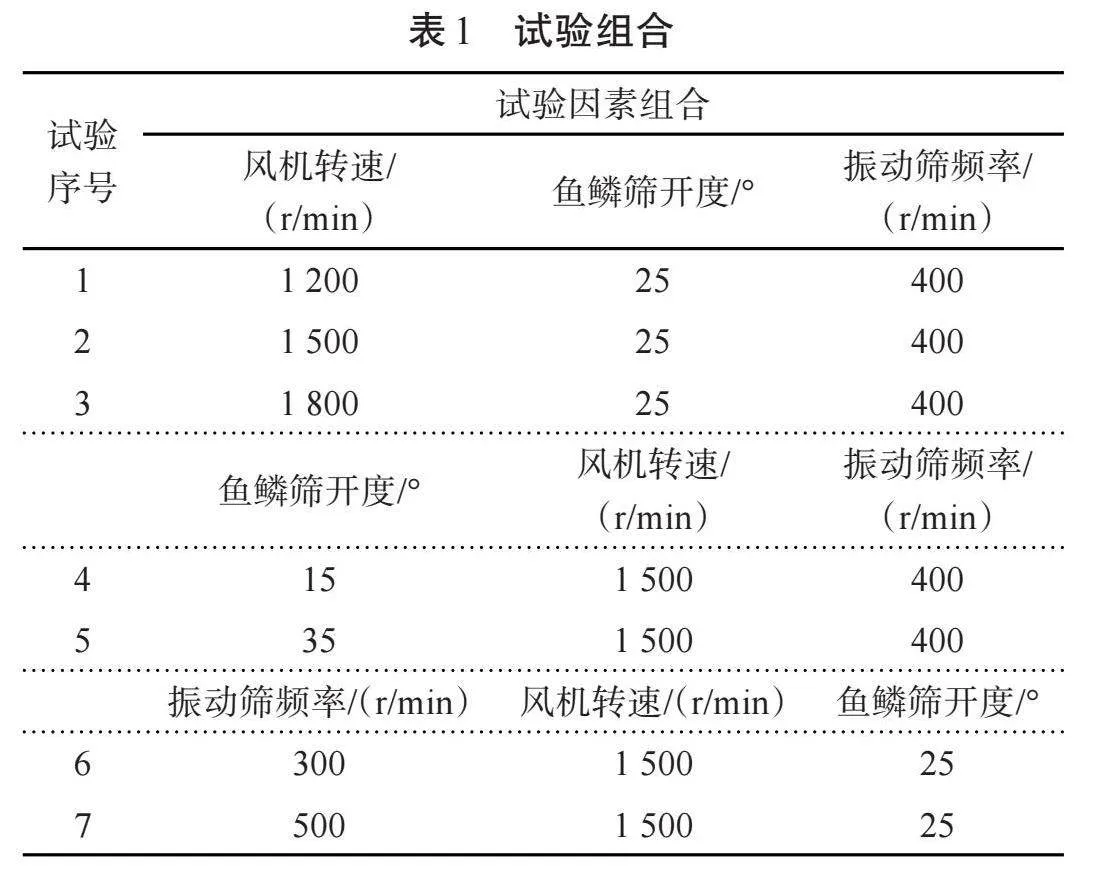
選取風機轉速、振動篩頻率和魚鱗篩開度3個因素進行試驗,試驗因素組合及序號如表1所示。用高速攝影機對清選拋出物進行拍攝,研究上述3個因素對清選損失籽粒分布規律的影響,每組試驗前試驗臺先空轉1 min,將上一組試驗的物料充分排凈;每組試驗結束后,對高速攝像機拍攝捕捉到的大豆籽粒進行整理分析。為提高試驗的準確性,每組試驗重復3次取平均值。
2.2 大豆籽粒在拋出時運動示蹤
高速攝影機安放在試驗臺拋出口一側,通過以太網數據線纜與計算機連接。試驗人員通過PCC2.8軟件打開高速攝影機,調整高速攝影機焦距使其獲取清晰的圖像。試驗臺開始工作后將清選損失物料排出機外,試驗人員通過PCC2.8軟件開啟捕獲錄制。
為拍攝大豆籽粒拋出運動軌跡,在試驗臺工作30 s后,啟動高速攝像系統,開始記錄試驗中大豆籽粒拋出運動的過程。
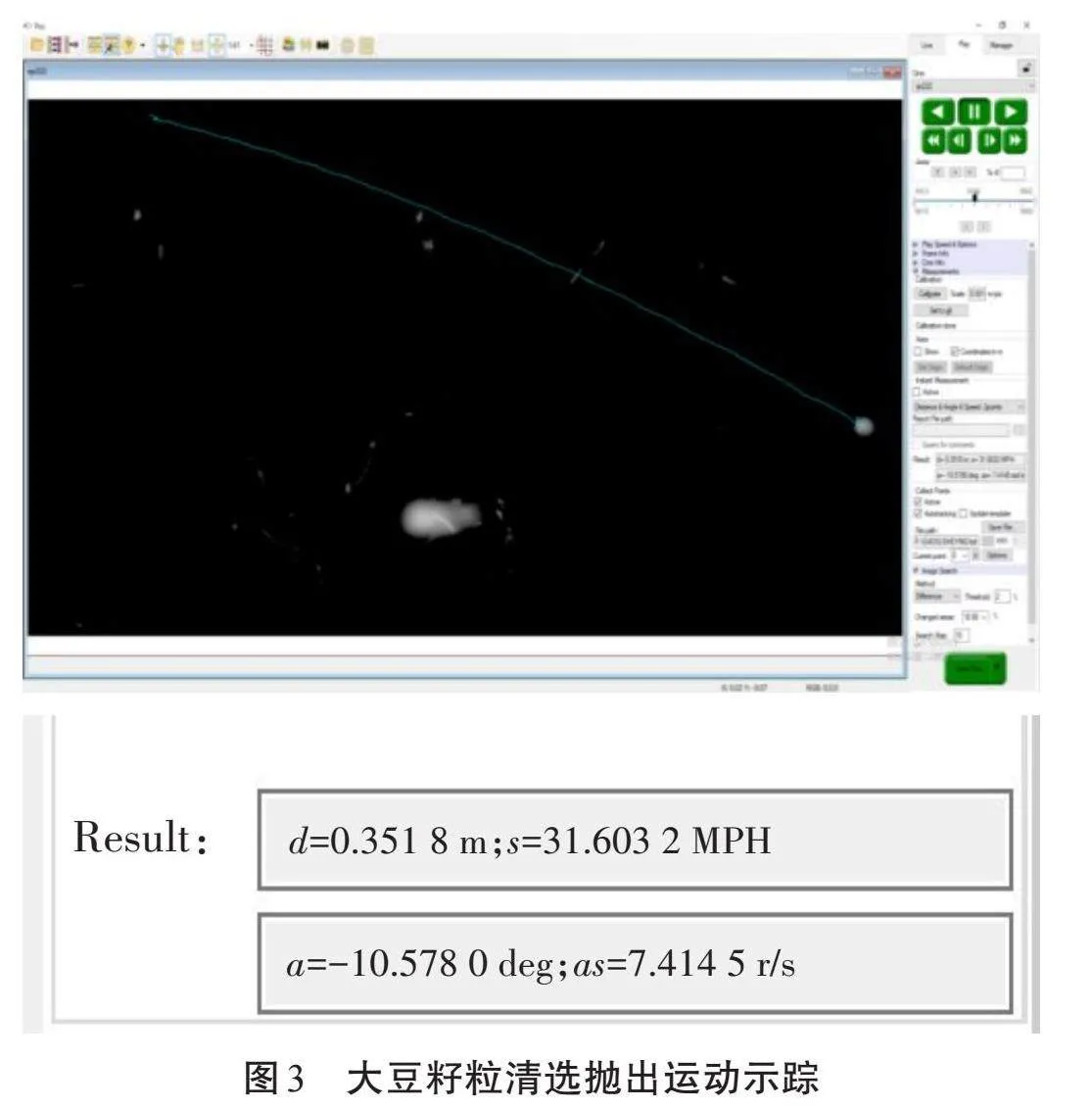
激活跟蹤測量工具,在圖像中選擇要跟蹤的點,標記要追蹤的大豆籽粒,如圖2所示。
選中Autotracking,并點擊播放按鈕,對目標進行軌跡標記,如圖3所示。
2.3 單因素試驗結果分析
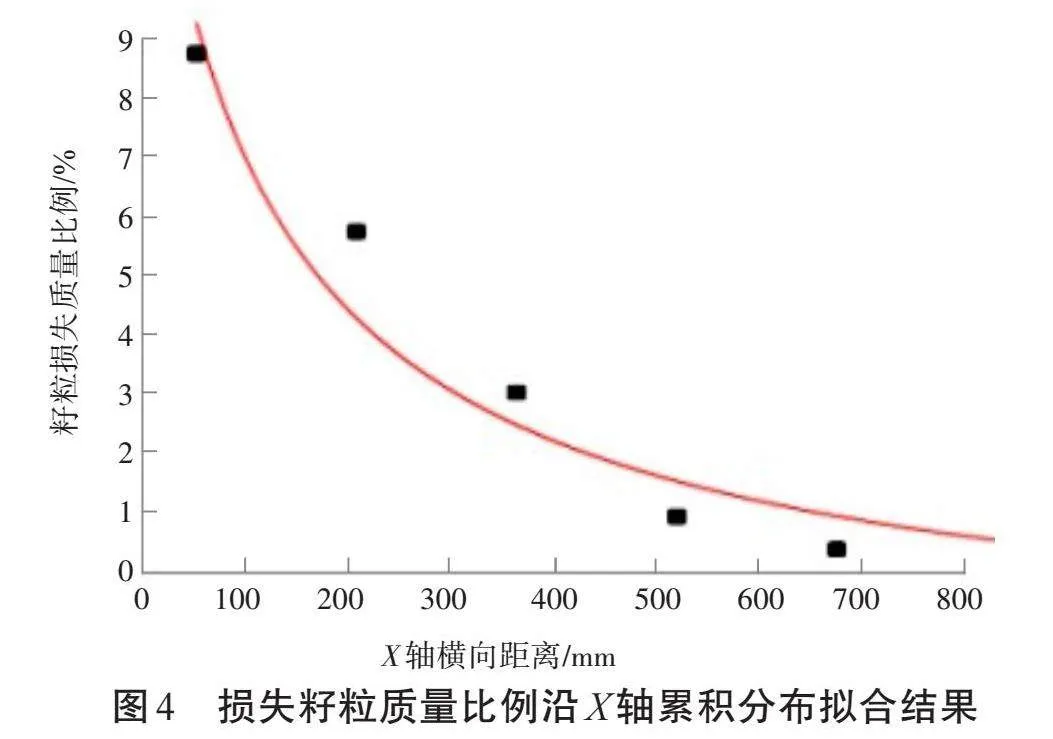
通過高速攝影試驗拍攝可知,大部分損失籽粒分布在振動篩后方0~260 mm的位置。在不同風機轉速、振動篩頻率、魚鱗篩開度下,清選損失拋出物中大豆籽粒數量沿X軸(X軸為檢測區域中心距排出口的垂直方向)的分布無顯著差異,即清選損失大豆籽粒沿X軸的分布情況與風機轉速、振動篩頻率、魚鱗篩開度無關。不同風機轉速、振動篩頻率、魚鱗篩開度下,損失籽粒質量比例沿X軸正向的分布概率模型見式(1)。
[y=a×xb]" " " " " " " " " " " " " " " " " (1)
式(1)中:a、b均為待定常數。利用表1中所示的試驗數據,通過Origin軟件進行非線性擬合得到a=587.284 18,b=-0.855 76,擬合結果如圖4所示。
通過PCC2.8軟件分析,確定了大豆籽粒吹出排出口后的運動軌跡為拋物線,且大豆籽粒自身也做高速旋轉運動(其平均速度為14.35 m/s),當大豆籽粒到達傳感器安裝位置時與水平面呈45°夾角。所以,為確保籽粒能垂直打擊到清選損失檢測傳感器上,清選損失檢測傳感器需與水平面呈45°夾角、朝向收獲機拋出口安放。
3 結論
通過高速攝影臺架試驗,找出了影響大豆清選損失籽粒分布規律的因素(風機轉速、振動篩頻率、魚鱗篩開度),分析得出以下結論:風機轉速、振動篩頻率、魚鱗篩開度對清選大豆損失籽粒的分布無顯著性影響;籽粒質量比例沿X軸的分布概率模型、損失籽粒分布區域大都在距排出口垂直距離0~260 mm的位置。因此,該位置是籽粒損失檢測傳感器在聯合收獲機上理想的安裝位置。
通過PCC2.8軟件分析,得出了清選損失大豆籽粒運動軌跡類似拋物線的結論。因此,籽粒損失檢測傳感器應與水平面呈45°、朝向清選排出口安放。大豆排出機外時,自身做高速旋轉運動,其平均速度為14.35 m/s。
參考文獻:
[1]唐小涵,金誠謙,張國海,等.我國聯合收獲機脫粒分離裝置的研究現狀[J].農機化研究,2022,44(3):1-9,15.
[2]劉鵬,金誠謙,楊騰祥,等.多參數可調可測式清選系統設計與試驗[J].農業機械學報,2020,51(S2):191-201.
[3]唐小涵,趙男,郭榛,等.多參數可調式清選損失分布檢測試驗臺設計與試驗[J].農機化研究,2022,44(12):148-155.
[4]介戰.我國谷物隨機損失率測試展望[J].農機化研究,2009(7):5-9.
[5]唐小涵,趙栗,宋麗,等.聯合收獲機清選損失監測研究現狀[J].鄉村科技,2024,15(1):145-149.
[6]冉軍輝,吳崇友.傳感器在谷物聯合收獲機中的應用進展及發展方向[J].江蘇農業科學,2019,47(22):23-29.
