果蔬采摘動作采集系統設計與試驗
2024-12-31 00:00:00肖瑩謝銘露景一佳童一飛
中國農機化學報 2024年7期


摘要:為提高果蔬采摘機器人動作的準確性,建立一套可應用于農作物采摘的動作數據庫。基于視覺識別技術,結合農業生產中對于果蔬采摘動作判斷的實際需求進行分析研究,分別從硬軟件設計的角度,設計一種針對果蔬采摘動作的綜合采集系統。在硬件層面,重點介紹包括UPS電源、運算主機、攝像頭等各部件的需求分析及選型結果。在軟件層面,介紹軟件系統總體架構并將子功能模塊化處理,此外重點介紹各功能模塊間的軟硬件交互方式。最后以蘋果的采摘動作為研究對象,設計整機測試試驗及動作識別試驗來檢驗系統的完備性。試驗結果表明,該動作采集系統對于單一采摘動作的識別具有較高的正確率,識別率達100%。
關鍵詞:果蔬采摘;動作采集;視覺識別;動作數據庫
中圖分類號:S225.92
文獻標識碼:A
文章編號:20955553 (2024) 070034
07
Design and experiment of fruit and vegetable picking action collection system
Xiao Ying1, Xie Minglu2, Jing Yijia3, Tong Yifei3
(1. Beijing Polytechnic, Beijing, 100176, China; 2. Nanjing Institute of Agricultural Mechanization,
Ministry of Agriculture and Rural Affairs, Nanjing, 210014, China; 3. School of Mechanical Engineering,
Nanjing University of Science and Technology, Nanjing, 210094, China)
Abstract:
In order to improve the accuracy of action of fruit and vegetable picking robot, it is established a set of action database which can be applied to crop picking. Based on visual recognition technology, this paper analyzed and studied the actual needs of fruit and vegetable picking action judgment in agricultural production, and designed a comprehensive collection system for fruit and vegetable picking action from the perspective of hardware and software design. On the hardware level, the paper mainly introduced the demand analysis and selection results of various components including UPS power supply, computing host and camera. At the software level, it introduced the overall architecture of the software system and modularized the sub-functions. In addition, it focused on the interaction between the software and hardware among the functional modules. Finally, taking the apple picking action as the research object, the whole machine test and the action recognition test were designed to check the completeness of the system. The test results showed that the action acquisition system had a high accuracy for single picking action recognition, the recognition rate was 100%.
Keywords:
fruit and vegetable picking; action collection; visual recognition; action database
0 引言
農機裝備中的各項技術在不斷發展,已逐漸使用智能機器人代替純人工實現農業的現代化。智能采摘技術在我國自動化控制的沖擊下不斷進行創新,應用于多場景、多特征的采摘機器人越來越受到農業精準設施裝備的青睞。該智能農機裝備,可以極大地解放勞動力,降低勞動強度,提高采摘效率,進而節約生產成本[1]。相比于常規的農機裝備對復雜果蔬采摘的適用性較差,如機械爪類采摘機器人常因為采摘動作不準確而破壞果蔬品相。理想的采摘機械手需要具有一定的避障能力,避免碰傷果實。因此,如何優化果蔬采摘機械手動作精度是設計采摘機器人的重要環節之一[2]。為了使采摘機器人能夠實現自主進行作業,往往會為機器人嵌入機器學習系統,然而目前還沒有針對果蔬類農作物采摘標準動作的數據庫。綜上所述,研究基于視覺識別的果蔬類農作物采摘動作采集系統,建立動作捕捉數據庫,為實現果蔬類農作物的精準、安全采摘,對農業裝備的現代化發展有著重要的意義。
伴隨著計算機視覺識別技術的快速發展,視覺識別技術在安全防護、高級人機互動、視頻搜索分析等方面均具有重要的實用價值和研究價值[3]。在農業生產中,由于農機裝備運行場地的復雜性,所處環境光照情況的復雜性,以及單株果蔬上果實位置的不確定性,給圖像中操作者動作的識別造成了一定的困難[4]。同時在農機裝備果蔬采摘中,所設計的視覺識別系統應能夠實現對采摘過程中的視頻進行自動記錄,為果蔬采摘動作識別提供有效的圖像數據支撐,給后續的算法與裝置調試提供數據反饋。
目前的果蔬采摘機器人研究方面,日本久保田株式會社在1988年開發出一款使用吸盤和刀片采摘柑橘的收獲機器人[5]。中國農業大學團隊開發了一款番茄采摘機器人[6],該機器人配置了雙目視覺系統,并在采集端采用了夾剪一體的氣動式結構,采摘成功率約為86%。此外,華南農業大學葉敏[7]、陳燕[8]等在荔枝采摘機器人及末端執行器方面做了許多研究工作。西北農林科技大學張發年[9]、陳軍[10]等分別在獼猴桃采摘末端執行器方面做了許多研究工作。
雖然學者們針對果蔬采摘機器人做了大量的研究和探索,但鮮有針對現實中工人的采摘動作進行研究與分析。由于采摘機器人往往存在通用性較差、生產設計成本高的問題,大部分采摘機器人仍處在實驗室研究階段,市場上還沒有出現商業化的果實采摘機器人。因此,收集并分析工人采摘動作,為采摘機器人的動作學習提供數據支撐、節省設計成本具有現實意義。
本文結合某實業公司果蔬采摘動作采集系統產品開發的實際需求及配置要求,對系統進行需求分析,從而提出系統的總體目標和所要實現的功能。將整個采摘動作采集系統的總體設計劃分為兩個部分:硬件部分和軟件部分。詳細介紹系統硬件部分的關鍵技術,此外從功能層面闡述軟件部分的運行邏輯以及各部分的信息流向。最后根據實際需求與參數設置,以及整個動作采集系統的完成情況,對系統的實際工作情況進行測試。
1 果蔬采摘動作采集系統總體設計
1.1 動作采集系統需求分析
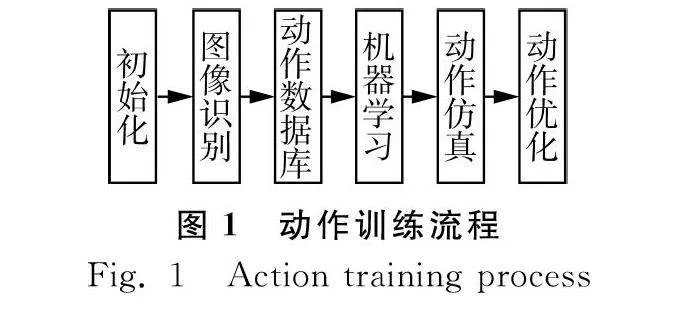
現有的自動采摘方式一般具有5種形式:振動式、氣動式、剪切式、梳刷式以及采摘機器人[11]。前4種是通過外力搖晃或震蕩果蔬植株來實現采摘,這些采摘方式應用于果蔬植株較小、果實分布于植株表層或果實堅硬的農作物;另一種則是以機械手加機械臂的形式,對果實進行精準采摘,雖然這種機器人采摘方式效率較低,但是果實保有率較高,且一般用于人工采集后的二次檢查復采。為使采摘機器人自主進行作業,為機器人嵌入機器學習系統。采用機器學習的方法可以對采摘機器人的采摘動作進行訓練。然而目前沒有較好地應用在機器學習領域針對農作物采摘的動作數據庫,因此建立一個具有針對性的動作數據集具有一定的現實意義。此外,在擁有采摘動作數據集的基礎上,可以實現驗證采摘機器人動作訓練的效果,也可以采用多媒體技術,結合仿真軟件對動作的執行速度和準確性進行模擬仿真[12]。通過對仿真模擬數據的分析和總結,可以對動作進一步的訓練和優化,直到采摘機器人的動作滿足設計需求,如圖1所示。
基于對上述問題的分析,結合某實業公司開發果蔬采摘動作采集系統的實際需求,在清楚地明確了整個系統的注意事項(明確系統目標、確定系統使命以及系統適用條件)之后,確定此次開發的果蔬采摘動作采集系統的主要功能如下。
1) 發送開始、結束命令。
2) 錄制實時監控視頻和簡單糾錯指示。
3) 調取果蔬采摘歷史任務。
4) 利用人工智能技術,通過機器視覺識別操作人員肢體動作特征,進行合規性判定和計數。
5) 智能拍攝視頻并本地保存。
1.2 系統架構總體設計
本果蔬采摘動作采集訓練系統的應用場景是以落葉喬木類農作物的采摘環境作為研究對象。操作人員在進行人臉識別后,匹配數據庫中的個人信息數據,系統在確認完成信息匹配后,發送開始指令,此時操作人員開始進行正常采摘工作。視頻錄制攝像頭獲取實時監控視頻數據并進行儲存,同時將獲取到的視頻數據傳遞到軟件層,由視覺識別系統進行動作識別,并與標準動作進行比對。根據對比結果將采摘結果計數,將識別結果超出標準范圍的動作進行記錄。最終將結果以及動作比對結果返回PC或PAD終端。整個果蔬采摘動作采集系統的流程如圖2所示。
2 果蔬采摘動作采集系統硬件設計
2.1 硬件系統總體架構
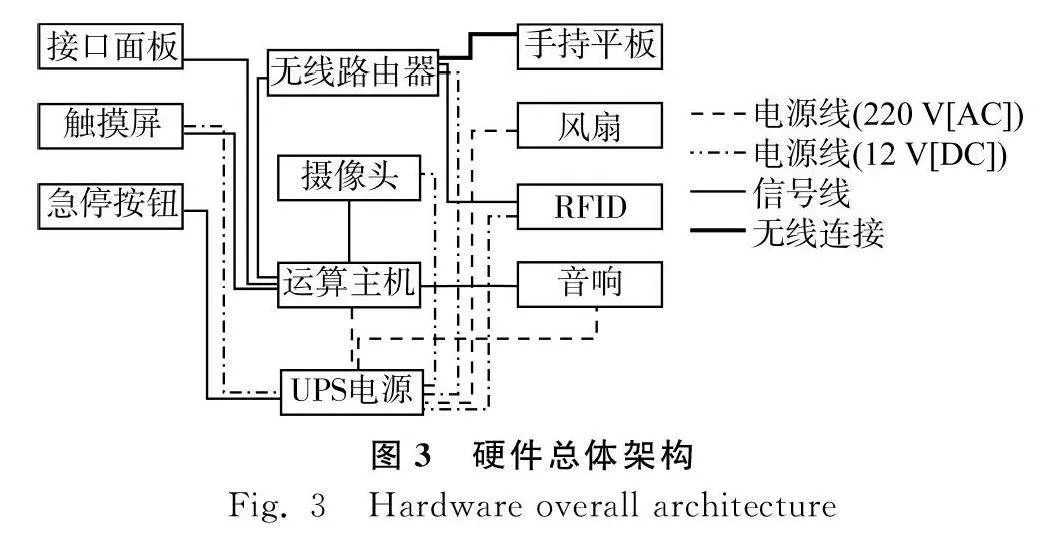
通過面向果蔬采摘動作識別的智能采集系統的功能需求和應用的三項技術理論即:人臉檢測、動作識別和RFID技術,可以分析出需要1臺計算機來存儲和處理數據,1臺視覺識別設備(通常使用攝像機來捕捉圖像),RFID讀寫器和電子標簽設備,電源,聯網設備,人機交互設備即觸摸屏等。分析相關設備之間的連接關系,例如是否需要連接電源,是否需要連接信號線,或者是無線連接。再通過分析和參照相關文件,果蔬采摘動作采集系統的硬件架構如圖3所示。
系統主要由UPS電源、運算主機、攝像頭、無線路由器、RFID、風扇、音響、手持平板、觸摸屏、接口面板、急停按鈕及機殼、腳輪等配件組成。
UPS電源:為系統各部件提供電源,主要輸出220 V(AC)和12 V(DC);UPS蓄電池可保證設備運行5 h以上。運算主機:使用高性能邊緣計算主機,為系統計算機視覺及其他設備運行提供運算服務。其中攝像頭、觸摸屏、音箱、控制面板部分接口直接與運算主機相連,負責運算、存儲和處理數據。攝像頭:計算機視覺輸入部件,使用云臺攝像頭,可以智能調整攝像頭以達到更好的拍攝效果。無線路由器:使用加密網絡連接內部和外部設備。連接的內部設備有運算主機、RFID,外部設備有手持平板。RFID:模塊內部集成RFID讀寫器和激活天線,接口面板預留激活天線接口。風扇:散熱風扇,共有4組,通過溫控器控制風扇的工作狀態。音響:發聲設備,通過觸摸屏控制音量大小,實現智能語音播報。手持平板:作為主要交互設備,主要實現系統和管理人員的交互控制。觸摸屏:輔助交互設備。控制面板:擴展外接接口。急停按鈕:用于緊急情況下系統設備斷電。各模塊之間分為強電連接和弱電連接,強電又有220 V和12 V的,同時還有無線連接的設備,主要是通過平板電腦對整個果蔬采摘動作識別系統的無線操控。
2.2 硬件系統集成
運算主機是視覺識別處理運算的核心,其他設備作為輸入輸出設備與運算主機進行交互。同時運算主機承載系統軟件交互服務,并能夠儲存數據、音視頻和文檔資料。運算處理主機搭載了4個USB3.1Gen2口,可以擴展WiFi、4G、GPS等模塊,同時提高了系統和周邊配備的傳輸速度,可適用于各種天氣和環境的情況。該運算主機配備有128 G高速固態硬盤+1 TB機械硬盤,以及8 GB內存,數據傳輸速率可達到32 Gb/s。全鋁機箱散熱更高效,且具備一定的抗震能力,從而使得穩定性強以及計算機的壽命更長。考慮到該運算主機的工作環境包括室內及室外,甚至較為極端的環境,將主機的工作溫度控制在-20 ℃~60 ℃,在主機中搭配液冷風扇散熱。由于該主機的主要工作在于視頻數據的處理,為保證圖像處理的效果,GPU需配備1660Ti及以上設備。主機DP、DVI、HDMI接口一應俱全,可以多顯示器同時輸出。
對于攝像頭工作環境、具體形狀尺寸等選型判斷遵照硬件部分集成的具體情況。
攝像機的具體參數規格如下。
1) 帶二軸云臺,可通過程序控制轉向,云臺控制使用PELCO_D協議。
2) 物理像素200萬及以上,無畸變。
3) 工作溫度范圍-20 ℃~60 ℃。
4) 可自動調焦(3~12 mm),支持3倍,最高不超過10倍變倍,可在2.5 m位置完整拍攝1 m×0.5 m區域。
5) 視頻使用USB傳輸。
6) 暗光下圖像噪點少,信噪比大于52 dB。具有較好的抗震防老化能力,搬運不會導致攝像頭轉動。
7) 在室外環境下使用,在陰天、晴天等情況下可自動調整曝光度。
8) 尺寸不大于140 mm×140 mm×200 mm。
綜上所述,最終應用于實際的攝像機選擇海康威視200萬2.5寸網絡高清miniPTZ攝像球機,該攝像頭可以滿足上述對于攝像機的選型要求,并且經過對比選優,在相同價位下其使用壽命、材質、售后服務等在與品牌的攝像頭的對比中占優勢。
本系統將硬件部分包括運算處理主機、攝像頭、RFID讀寫器、路由器、接口面板、USP電源、風扇、音響和顯示屏都被集成在1臺機器內部,其中處理主機的CPU為i5八代四核處理器,內存8 G,GTX1060Ti獨顯;路由器的無線傳輸速率為1 200 Mbps,無線網絡的支持頻率是2.4 G和5 G,有內置天線;網絡攝像頭帶二軸云臺(水平和垂直兩個方向);RFID讀寫器的應用編程接口為RS-232或TCP/IP,支持EPC global UHF Class 1 Gen 2/ISO 18000-6C/ISO 18000-6B;UPS電源為鋰電池(12 V,150 AH),交流輸出是220 V,正弦波(包含12 V,3 A以上DC輸出5個接口;220 V AC輸出1個接口,電池內置保護板以及傳感器模塊實時顯示電池電量,提供接口供APP開發)。
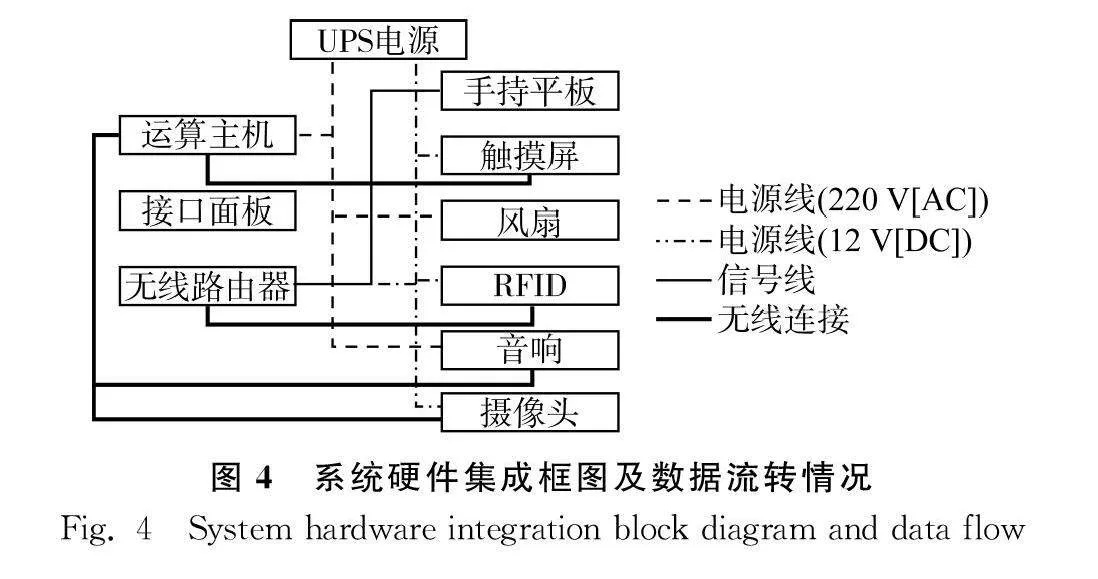
從內部硬件集成方式及數據流轉的設計分析,主要的部分是攝像頭、音響以及接口面板與運算主機之間通過信號線連接,再通過運算主機與路由器之間的網線連接構建起局域網,從而使各個設備連接到同一局域網中從而來進行數據的傳輸;利用USP電源為各部件提供電源,通過電源線向運算主機、音響、風扇輸出220 V交流電壓,以及向觸摸屏、無線路由器、攝像頭、RFID輸出12 V直流電壓,保證各設備可運行5 h以上;觸摸屏、顯示屏和運算主機之間通過高清晰多媒體接口線(HDMI線)連接,以此保證較高質量的視頻信號傳送。系統硬件集成框圖及數據流轉情況如圖4所示。
3 果蔬采摘動作采集系統軟件設計
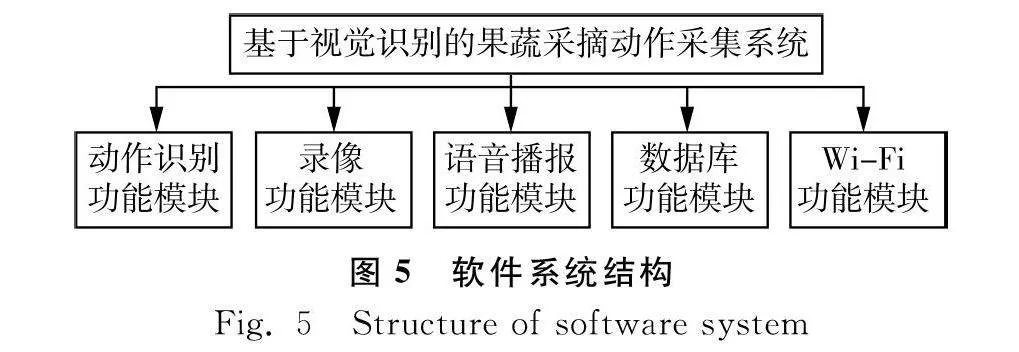
3.1 軟件系統結構
果蔬采摘動作采集系統對軟件部分的設計采用模塊化的思想[13],根據具體的需求分析,將各模塊劃分為并行結構,選擇適用于農作物采摘的動作識別功能模塊、人臉識別功能模塊、錄像功能模塊、Wi-Fi功能模塊、RFID讀寫功能模塊、數據庫模塊以及語音播報功能模塊等,系統的結構如圖5所示。
在進行采摘的準備階段,首先需要確定操作人員與電子標簽的關系,將操作人員的人像信息與電子標簽上的編號一一對應。因此需要提前采集電子標簽的編號信息和操作人員的基本信息,采集完成后存入數據庫系統中,用于測試前的身份對比識別。
本系統對讀取標簽的要求較低,只需要能在相應位置正確讀寫到即可,因此讀寫器的參數設置以及讀寫器每次讀寫時間的控制等方面無須進行太過復雜的配置。
3.2 系統軟硬件交互
基于系統使用方便和能夠快捷啟動等方面的因素來考慮,系統啟動后,人們能夠根據顯示的信息來快速了解和掌握本系統的運行情況,從而更加方便地控制和操作,為此果蔬采摘動作采集系統的人機交互界面的屏幕顯示應具備:WIFI設置相關功能;攝像頭連接、角度、焦距調整;電源相關設置;電池電量顯示;機器人內部設備運行、連接情況檢測顯示;動作識別、人臉識別運行情況檢測等。
3.3 軟件各模塊設計
3.3.1 動作識別模塊設計
在對實際采集到的視頻數據進行分析可以得出,對于骨架的提取需要從時間維度和空間維度兩個層面進行考慮[14]。空間維度為采集到的視頻數據中某一幀內的顯示出的骨架圖,顯示其空間分布;而在時間維度則是將相鄰關鍵幀的圖像中代表相同關節的點在時間層面連接起來,考慮其時間變化。考慮到這兩種維度,為提高識別精度,則需要參考細化與卷積的思路:首先是經過剝離,在保持原來的形狀的基礎上去掉部分點,直到得到圖像的骨架;其次如果是需要考慮動態的二值化圖像輪廓,則需確定以某一個關節點作為卷積中心;之后選取需要在空間維度上參與卷積的關節結點,即在坐標系中能夠組成一條邊的相鄰的點;接著選取相鄰關鍵幀中一副骨架內相同的關節節點,作為時間維度上參與卷積的點;最后確定卷積中心并對參與卷積的點分別從兩個維度上進行卷積,采集最終的結果。
通過獲取需要的某兩個關節點的坐標,計算出響應的距離,如式(1)所示,可以直接使用這些距離特征來識別某些簡單姿態,如抬手等。
dx,y,z=(xi-xj)2+(yi-yj)+(zi-zj)
(1)
式中:
x、y、z——
對應關節點的空間具體位置。
通過繼續處理這些距離特征,根據多點之間的距離計算角度特征,使用余弦定理求出各關節點兩兩連線后的夾角,進一步識別動作細節。
分析視頻文件中的關鍵幀的基礎上,首先在圖像信息中提取出關節節點的二維坐標,以此構建骨架在二維坐標中的向量,之后利用骨架提取算法來提取出骨架序列。由于在時間維度的骨架序列信息存在冗余,因此在對圖像進行視覺識別處理之前,對于視頻信息的關鍵幀提取就顯得尤為重要。
綜上所述,在本次果蔬采摘動作采集系統的開發項目中,對于視頻信息在按照規則提取出關鍵幀的基礎上,為實現最終的動作識別,具體操作步驟如下。
1) 剔除背景信息,保留人體輪廓。
2) 找到二值化的圖像輪廓。
3)" 找到最大的人體輪廓。
4) 將最大的人體輪廓的凸包提取出來,并據此找到骨骼和關節的相對位置。
5) 定位關鍵點,包括骨骼與關節的相對位置,標記出骨骼線和關節點。
6) 把提取的特征點和動作特征字典中的進行比對,然后判斷該訓練動作的完成度。特征字典主要包括以下幾個方面:人體中心點、骨骼長度、骨骼數目、關節的坐標點、關節的個數以及標準動作下骨骼之間的角度。
在分析記錄具體動作時,以采摘過程中常出現的下蹲動作為例,主要需要檢測腿部有彎曲,且檢測hipleft、knee、ankle三關節點之間的夾角關系和距離關系,夾角小于160°,距離兩邊之和大于第三邊的1.2倍,證明識別到的動作屬于下蹲動作。
3.3.2 錄像功能模塊設計
將隨機附帶的電源適配器插入電源插座,攝像機一端與電源連接,另一端通過交換機與路由器相連接,并開始自檢,待攝像機完全啟動之后,電源指示燈顯示攝像機部署就緒。
設備自檢完成后,將攝像機和電腦配置在同一個局域網,即在電腦的IE瀏覽器上輸入網絡攝像機的IP地址,從而訪問攝像機操作界面,在該操作界面上對錄像各部分功能模塊進行設置與調試。
當要選擇播放已經錄制好的視頻文件時,則需設計一個錄像回放子模塊,在該子模塊中,單擊“回放”按鈕,隨后打開“選擇視頻文件”的對話框,即將要播放的視頻確定好后,單擊“確定”按鈕,便可在該子模塊中觀看該視頻。能夠實現錄像回放功能的子模塊需要用到了Windows Media Player控件。
錄像回放子模塊具體實現步驟如下。
1) 新建一個命名為Video Playback.cs的Windows窗體,目的在于實現回放已經完成錄制的視頻文件的功能。
2) 通過設置“回放”按鈕,來實現對于該功能的控制。對要打開的文件格式以及存儲的默認路徑進行設置后,打開“選擇視頻文件”對話框,選擇需要回放的視頻文件,將這個視頻文件發送給Windows Media Player 1控件的統一定位資源上,指出文件位置以及需要對該視頻文件進行的操作。
3) 選擇“關閉”程序,當回放視頻播放完畢后,通過調用Close方法對當前窗口進行“關閉”的操作。
3.3.3 數據庫模塊設計
數據庫作為本系統軟件中不可缺少的一部分,在采摘動作采集系統中,操作人員的所有信息即人員姓名、操作項目、編號等個人資料以及采摘都需要用數據庫進行管理并輸入輸出[15]。
本系統采用的是SQL Server數據庫來存儲采摘結果以及操作人員的信息。具體過程為:創建名字為db_IMP.mdb的數據庫,數據庫中包含操作人員表、采摘項目表和采摘結果表,共3個數據表。每張數據表的字段以及注釋如下。
1) 操作人員表。操作人員表主要用來記錄操作人員的個人信息,包含個人編號、個人姓名、性別、身高、體重、采摘項目名稱。
2) 采摘項目表。采摘項目表主要用來記錄項目的相關信息,包含采摘項目名稱和項目編號。
3) 采摘結果表。采摘結果表主要用來記錄操作人員在結束后的結果相關信息,包含個人編號、采摘項目名稱、采摘數量、損壞數量以及完成操作時間。
這三個實體之間的關系如圖6所示。
4 動作采集系統測試
4.1 整機性能測試
為測試采摘動作采集系統整機工作的穩定性,通過模擬不同的工作環境,綜合考察系統的散熱性、穩定性、防水性和靈活性[16]。
在散熱性方面,將機器設置在陽光充足的戶外或溫度較低的冷庫,開機放置4 h后檢測系統的運行情況,以此來模擬夏季與冬季的戶外工作情況。試驗結果表明,機身上通風口的合理設計以及在主機上搭配的用于散熱的液冷風扇保證了在長時間不同戶外工作環境下整機的正常工作。
在穩定性方面,試驗采用將處于開機狀態的機器分別推著在室內、平坦的水泥路、坎坷不平的土路以及草地上快速行走30 min,隨后檢查機器的各項性能。滾輪及機器內部底層裝有彈簧減震器,同時各部分的接線選擇高性能連接器,保證連接線的密封性以及優秀的機械性能與電氣性能。因此,在該項測試所有的測試結果中,液晶顯示屏、路由器、讀寫器等電子元件均正常運行,且各部分安裝的相對位置未發生改變。底部萬向輪可以進行鎖緊,保證在機身需要時,即使地面不平整,機身也可以實現靜止。
在防水性方面,在機身外殼連接處使用雙層橡膠密封件,對機身外殼各個螺絲孔進行密封處理,同時在液晶顯示屏上采用防水膜。測試在戶外小雨的情況下,機器仍能正常運行,但是中到大雨會導致機器內部積水,影響機器正常運行,因此因盡量避免下雨的情況下在戶外使用該設備。
在靈活性方面,機身底部搭載有4個滾輪,處于機身前部的2個減震萬向輪,處于機身后部的是2個減震定向輪,同時在內部部件集成上將質量較大的部件布置在底部,使得整個設備重心靠下。因此,在機器前進的過程中,機器能夠平穩移動并且前部的減震萬向輪保證機器移動的靈活性。
4.2 采摘動作識別試驗
為研究采摘動作識別采集成功率,針對該動作采集系統的核心功能設計試驗。研究在進行蘋果采摘時,拉、扭、拉+扭的動作對果實采摘情況,每個動作試驗樣本為100個不同姿態,并選擇枝條強度相近的果實植株[17],試驗過程中盡量保持動作速度與時間一致。并記錄各種動作下果實的完整程度,以此作為判定采摘動作效果的依據。
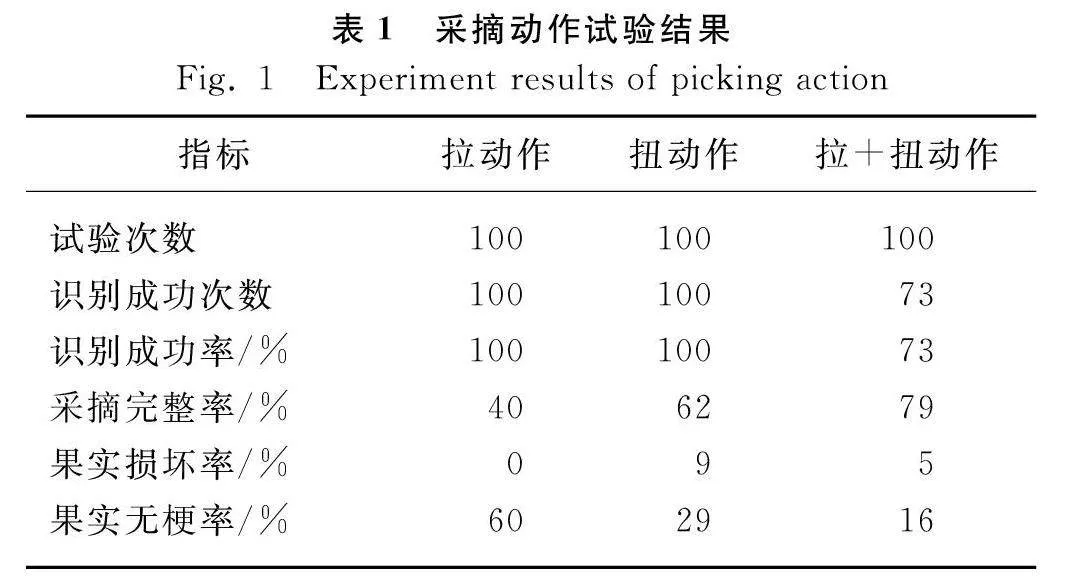
本次試驗中,定義“拉動作”為握住果實,沿著手臂方向拉動速度為120 mm/s,動作時間為0.5 s;定義“扭動作”為握住果實,以手腕為軸轉動果實,扭動速度為90°/s,扭轉時間為1 s;定義“拉+扭動作”為握住果實,以120 mm/s的速度拉動30 mm,同時以手腕為軸轉動果實,扭動速度為90°/s,扭轉時間為1 s。試驗結果如表1所示。
由表1可以看出,本動作采集系統對于單一采摘動作具有較強的識別成功率,對于單一的“拉”或“扭”的采摘動作均有100%的識別成功率;對復合動作的識別判定能力還有待改進,對“拉+扭”的復合采摘動作的識別成功率僅為73%;完整的采摘結果包括無損的果實及果梗,“拉”的動作能保證果實不易損壞,但是卻容易使得果梗斷裂,采摘完整率為40%;“扭”的采摘動作會有9%的果實損壞率,整體采摘完整率為62%;通過試驗可知,“拉+扭”的復合采摘動作在果實的采集中較為可靠,果實完整率達79%,能較好地保存果實及果梗。
5 結論
1) 本文以視覺識別技術為核心,對視覺識別技術以及相關算法原理進行探討,同時結合系統工程的方法,從硬件與軟件兩個層面,設計出可應用于識別人工果蔬采摘活動的動作采集系統。
2) 在設計試驗階段,以蘋果的采摘動作為研究對象,設計整機測試及動作識別試驗來檢驗系統的完備性,試驗結果表明該套動作采集系統對于單一采摘動作的識別具有較高的正確率,可以達到100%的識別成功率。但本果蔬采摘動作采集系統對于復雜采摘動作的識別效果欠佳,僅為73%,識別能力仍有一定的改進提升空間。
3) 識別結果顯示,在果實采摘時,采用“拉”的動作能保證果實不易損壞,但是卻容易使得果梗斷裂,采摘完整率為40%;采用“扭”的采摘動作會有9%的果實損壞率,整體采摘完整率為62%;“拉+扭”的復合采摘動作在果實的采集中較為可靠,果實完整率達79%,能較好地保存果實及果梗。
參 考 文 獻
[1]王麗麗, 郭艷玲, 王迪, 等. 果蔬采摘機器人研究綜述[J]. 林業機械與木工設備, 2009, 37(1): 10-11, 14.
Wang Lili, Guo Yanling, Wang Di, et al. Overview of study on fruit and vegetable picking robots [J]. Forestry Machinery and Woodworking Equipment, 2009, 37(1): 10-11, 14.
[2]劉凡, 楊光友, 楊康. 農業采摘機器人柔性機械手研究[J]. 中國農機化學報, 2019, 40(3): 173-178.
Liu Fan, Yang Guangyou, Yang Kang. Research on flexible manipulator for agricultural picking robot [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(3): 173-178.
[3]許傳威, 陳韓, 陶翔翔, 等. 基于視覺識別的智能跟隨系統的設計和實現[J]. 電腦知識與技術, 2019, 15(27): 204-207.
[4]徐雪峰, 黃余. 基于機器視覺的機器人智能采摘實驗平臺開發[J]. 中國農機化學報, 2019, 40(12): 177-183.
Xu Xuefeng, Huang Yu. Development of robotic intelligent picking experiment platform based on machine vision [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(12): 177-183.
[5]近藤直, 田充司, 野口伸. 農業機器人.II, 機構與實例[M]. 北京: 中國農業大學出版社, 2009.
[6]劉繼展. 溫室采摘機器人技術研究進展分析[J]. 農業機械學報, 2017, 48(12): 1-18.
Liu Jizhan. Research progress analysis of robotic harvesting technologies in greenhouse [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(12): 1-18.
[7]葉敏, 鄒湘軍, 羅陸鋒, 等. 荔枝采摘機器人雙目視覺的動態定位誤差分析[J]. 農業工程學報, 2016, 32(5): 50-56.
Ye Min, Zou Xiangjun, Luo Lufeng, et al. Error analysis of dynamic localization tests based on binocular stereo vision on litchi harvesting manipulator [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(5): 50-56.
[8]陳燕, 蔣志林, 李嘉威, 等. 夾剪一體的荔枝采摘末端執行器設計與性能試驗[J]. 農業機械學報, 2018, 49(1): 35-41.
Chen Yan, Jiang Zhilin, Li Jiawei, et al. Design and testing of litchi picking end-effector integrated clamping and cutting performance [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018,49(1): 35-41.
[9]張發年. 獼猴桃無損采摘末端執行器的設計與研究[D]. 咸陽: 西北農林科技大學, 2014.
Zhang Fanian. Research and design on the nondestructive end-effector of kiwifruit harvesting robot [D]. Xianyang: Northwest A amp; F University, 2014.
[10]陳軍, 王虎, 蔣浩然, 等. 獼猴桃采摘機器人末端執行器設計[J]. 農業機械學報, 2012, 43(10): 151-154, 199.
Chen Jun, Wang Hu, Jiang Haoran, et al. Design of end-effector for kiwifruit harvesting robot [J]. Transactions of the Chinese Society for Agricultural Machinery,2012, 43(10): 151-154, 199.
[11]高文碩, 宋衛東, 王教領, 等. 果蔬菌采摘機械研究綜述[J]. 中國農機化學報, 2020, 41(10): 9-15.
Gao Wenshuo, Song Weidong, Wang Jiaoling, et al. Review on fruit, vegetable and fungus picking machinery [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(10): 9-15.
[12]王貞. 面向維修操作的手部動作捕捉及其運動控制仿真研究[D]. 長沙: 國防科技大學, 2023.
Wang Zhen. Research on hand motion capture and motion control simulation for maintenance operations [D]. Changsha: National University of Defense Technology, 2023.
[13]趙冠楠. 工業機器人機械本體模塊化設計及其部分軟件的開發[D]. 秦皇島: 燕山大學, 2019.
Zhao Guannan. Modular design of industrial robot mechanical body and development of partial software [D]. Qinghuangdao: Yanshan University, 2019.
[14]刁智華, 吳貝貝, 毋媛媛, 等. 基于圖像處理的骨架提取算法的應用研究[J]. 計算機科學, 2016, 43(S1): 232-235.
Diao Zhihua, Wu Beibei, Wu Yuanyuan, et al. Application research of skeleton extraction algorithm based on image processing [J]. Computer Science, 2016, 43(S1): 232-235.
[15]唐良暉. 基于Android的智能終端通信勘察設計系統數據庫模塊的設計與實現[D]. 北京: 北京郵電大學, 2018.
Tang Lianghui. Design and implementation of the database module of intelligent terminal communication survey system based on Android [D]. Beijing: Beijing University of Posts and Telecommunications, 2018.
[16]陳勃琛, 郭廣廓, 董成舉, 等. 工業機器人性能測試技術發展綜述[J]. 自動化與信息工程, 2022, 43(1): 20-24, 48.
Chen Bochen, Guo Guangkuo, Dong Chengju, et al. Review of the progress in the performance test of industrial robots [J]. Automation amp; Information Engineering, 2022, 43(1): 20-24, 48.
[17]姬偉, 李俊樂, 楊俊, 等. 機器手采摘蘋果抓取損傷機理有限元分析及驗證[J]. 農業工程學報, 2015, 31(5): 17-22.
Ji Wei, Li Junle, Yang Jun, et al. Analysis and validation for mechanical damage of apple by gripper in harvesting robot based on finite element method [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(5): 17-22.