陸基工廠化水產養殖池自動清洗機器人設計與試驗
2024-12-31 00:00:00趙晴晴田云臣崔智明李建波馬國寧隋金柱
中國農機化學報 2024年7期





摘要:針對現階段陸基工廠化水產養殖池人工清洗存在勞動強度大、效率低等問題,設計基于軌道移動、具有越池清洗功能的養殖池自動清洗機器人。該機器人由移動機構、清洗機構和控制系統等組成。移動機構沿養殖池上方導軌前后、左右移動,清洗機構通過旋轉和上下伸縮裝置完成養殖池池底和池壁清洗,控制系統通過STM32F103單片機實現對清洗機器人的精準控制。通過建立全覆蓋柵格地圖的方法進行路徑規劃,并采用最短切線、野火法等算法實現自動避障,并對機器人進行測試。結果表明:刷盤轉速和驅動速度最優組合方式為刷盤轉速600 r/min,驅動速度 0.2 m/s。
關鍵詞:陸基工廠化;水產養殖;清洗機器人;自動控制;路徑規劃
中圖分類號:S969; TP242
文獻標識碼:A
文章編號:20955553 (2024) 070068 07
Design and test of automatic cleaning robot for land-based industrial aquaculture ponds
Zhao Qingqing1, Tian Yunchen2, 3, Cui Zhiming1, Li Jianbo2, Ma Guoning1, Sui Jinzhu2
(1. College of Fisheries, Tianjin Agricultural University, Tianjin, 300392, China; 2. College of Computer and
Information Engineering, Tianjin Agricultural University, Tianjin, 300392, China; 3. Tianjin Key Laboratory of
Aquatic-Ecology and Aquaculture, Tianjin, 300392, China)
Abstract:
Aiming at the problems of high labor intensity and low efficiency in the manual cleaning of land-based industrial aquaculture ponds, an automatic cleaning robot based on track movement with the function of crossing the pond is designed. The robot is composed of a moving mechanism, a cleaning mechanism and a control system. The moving mechanism moves forward, backward and left along the guide rail above the breeding tank. The cleaning mechanism cleans the bottom and wall of the breeding tank through rotation and upside-down telescopic device. The control system realizes accurate control of the cleaning robot through STM32F103 microcontroller. The path planning is carried out by establishing full coverage raster map, and the algorithm of shortest tangent line and wildfire method is used to realize automatic obstacle avoidance, and the robot is tested. The results show that the optimal combination of brush speed and drive speed is 600 r/min and 0.2 m/s.
Keywords:
land-based industrialization; aquaculture; cleaning robot; automatic control; path planning
0 引言
陸基工廠化水產養殖是在養殖車間內建立多個養殖池進行高密度養殖的模式[1],具有養殖效率高、養殖污染小的優點。但該模式下養殖池池底和池壁表面易富集細菌粘膜,影響養殖生產。目前養殖池清洗主要依靠人工作業,存在勞動強度大、清洗效率低、危險性高等問題。
隨著自動控制、人工智能等信息技術的發展,水下清洗設備的研究受到更多關注。袁夫彩等[2, 3]研制的水下船體表面清刷機器人,能夠清除表面附著的海洋生物和銹蝕等,降低船舶的航行阻力;林興月[4]設計的水下液壓式船體表面清潔機器人,能夠有效清理船舶表面的附著物和腐蝕物,定位誤差為0.27 m;英國船舶研究中心研發的船體清刷機器人將液壓工作站作為動力源,驅動方式采用液壓馬達驅動,行走速度可達987 m/h,清潔效率為1 653.6 m2/h[5];楊強等[6]設計的遙控泳池清洗機,具有清洗和過濾兩種功能,能夠切換自動、人工兩種清洗模式;黃達等[7, 8]設計的魚池清洗機器人,能夠自主完成單個魚池池底的清洗任務;Li等[9]研究的水池清洗機器人帶有機械手臂,能夠清洗水池側壁;日本九州大學設計的水下清刷機器人,攜帶水下攝像機,能夠通過采集圖像分析機器人清洗效果[10];黃小華等[11]針對深遠海網箱養殖網衣堵塞問題設計的網箱清洗機器人,運用高速水流驅動葉輪旋轉,使固定在工作盤上的清潔裝置在網衣表面進行摩擦旋轉清洗。
但是,上述清潔機器人主要是針對泳池和船底(船塢)的清洗,不能滿足水產養殖池多個池底和池壁清洗的實際需求。基于此,本文設計一種陸基工廠化養殖池自動清洗機器人。
1 總體結構與工作流程
1.1 總體結構
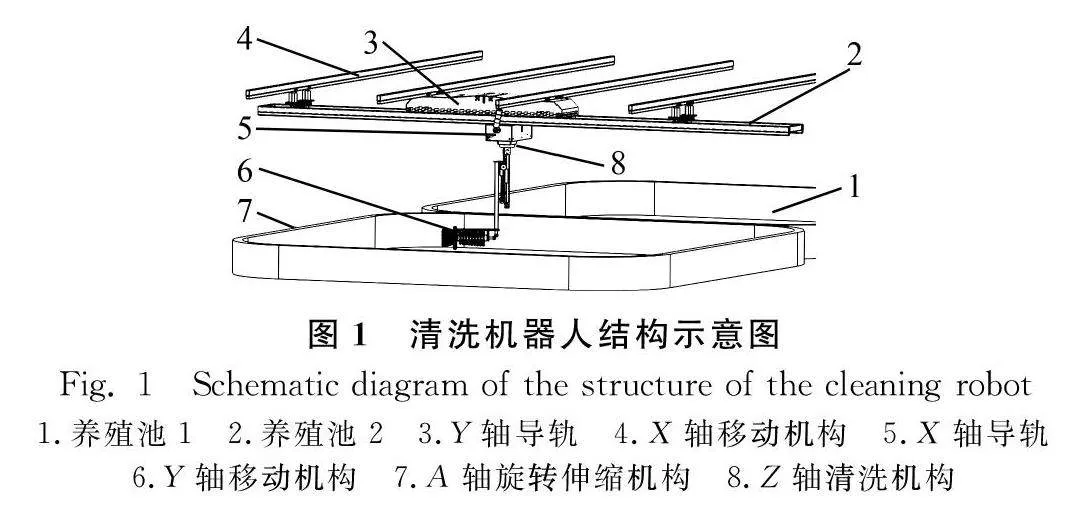
清洗機器人主要由機械結構和控制系統兩部分組成。機械結構如圖1所示,主要包括X軸、Y軸方向移動機構、Z軸清洗結構、A軸旋轉伸縮機構和清洗刷頭等。控制系統包括主控制器模塊、信息采集模塊、電機驅動模塊、附加模塊和電源模塊。
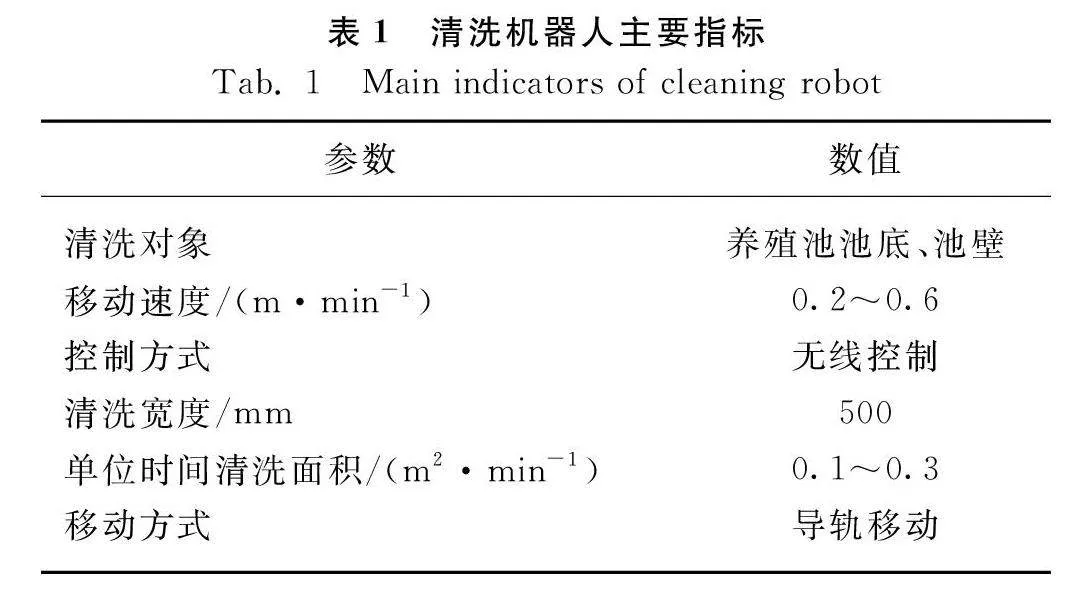
結合養殖池實際作業環境與清洗需求,清洗機器人主要指標如表1所示。
1.2 工作流程
清洗機器人工作流程如圖2所示。機器人啟動,傳感器采集機器人到養殖池池壁距離、排水柱位置等環境信息,建立環境地圖。機器人從起始點開始,按照規劃好的路徑清洗。Z軸清洗機構緩慢放下,到達程序設定高度,X軸移動機構負責前后移動,Y軸移動機構負責左右移動,二者配合實現機器人多個方向的移動,按照程序,執行路徑規劃與避障,在完成池底清洗后,使用盤型刷清洗池壁,全部清洗完成后機器人到達越池點,執行越池程序,開始下一個養殖池清洗。
2 關鍵結構設計
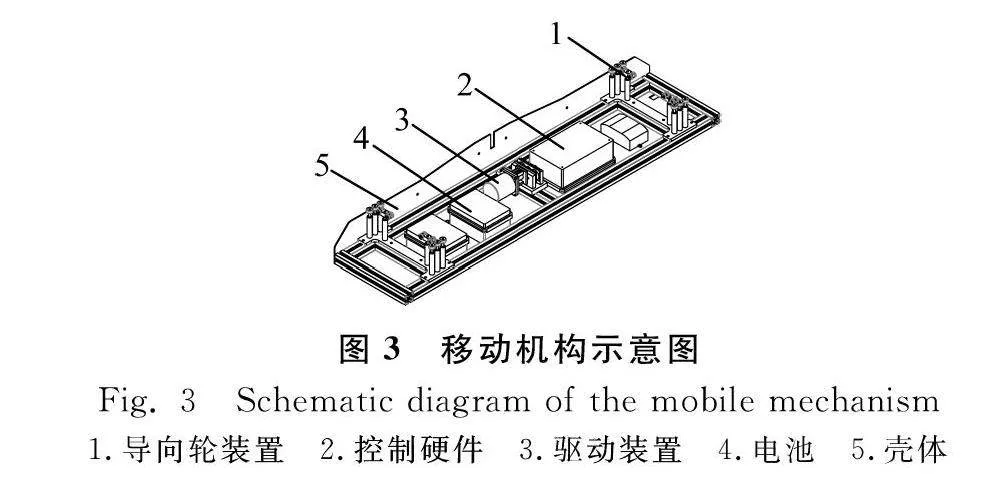
2.1 移動結構
移動機構包括X軸、Y軸移動機構,兩者結構相似。以X軸為例,結構如圖3所示。移動機構由殼體、驅動裝置、導向輪裝置、電池、控制硬件等組成。機器人工作環境為潮濕車間,因此殼體選用耐腐蝕材料,且頂部設計為中間高、兩側低的弧形結構,保證車間頂部凝結的水珠不會在殼體頂部聚集而影響機器人正常工作。驅動裝置選用帶寬25 mm、齒數40的同步帶輪結構,同步帶輪帶寬與導軌相連接的導向輪裝置采用工字型底板增大與移動機構的接觸面積。滑動輪分布在底板的兩側,通過直徑22 mm、長度96 mm連接柱與底板相連。每側有四根連接柱,呈三角狀排列。左右兩側的連接柱安裝直徑22 mm的尼龍輪,中間連接柱安裝適用于在軌道滑行的靜音吊輪,保證中間吊輪在導軌內滑動的過程中,即使導軌出現輕微偏斜也能平穩順利通過。
2.2 清洗機構
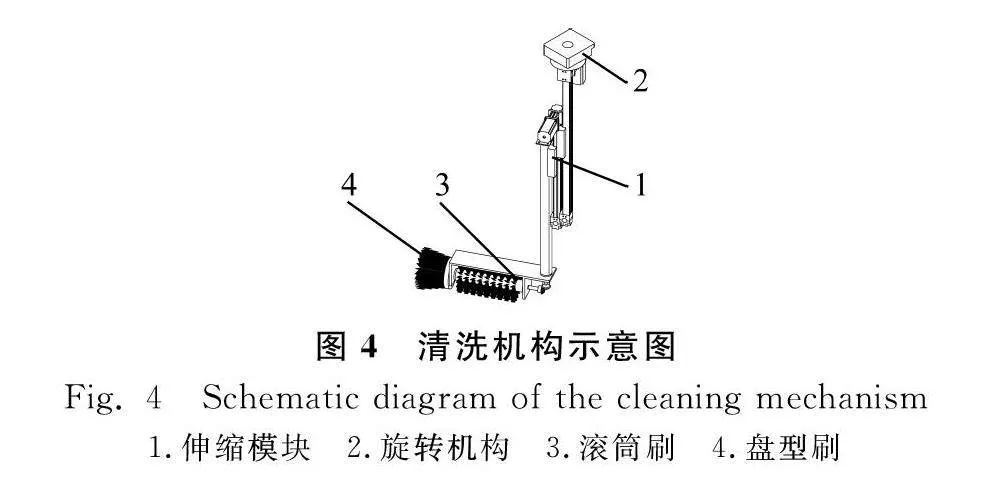
清洗機構如圖4所示,由旋轉伸縮組件和清洗刷頭組成。
2.2.1 旋轉伸縮組件
旋轉伸縮組件包括旋轉機構和伸縮模塊。旋轉機構由水平旋轉電機、旋轉盤組成。旋轉盤固定在Y軸移動機構底板,通過聯軸器與水平旋轉電機輸出端相連接,驅動旋轉盤轉動,從而帶動旋轉盤下方的伸縮模塊轉動。伸縮模塊包括方形桿和同步帶模組。方形桿長度為400 mm,內部安裝有旋轉桿,電機輸出端通過聯軸器與旋轉桿相連接。旋轉桿另一端安裝有錐齒輪組,通過錐齒輪組,改變旋轉桿方向,使其穿過同心連接的刷頭的中心孔,旋轉桿旋轉,帶動刷頭旋轉。步進電動機連接減速比1∶5的行星減速機,驅動垂直負載5 kg、導程400 mm的同步帶模組上下往復運動,使刷頭在工作過程中能夠抬起、降落,避開障礙物。
清洗刷頭采用滾筒刷與盤型刷結合的方式,完成池底和池壁的清洗。滾筒刷清洗池底,盤型刷清洗池壁,二者同軸連接。旋轉軸穿過兩個刷頭的中心孔,通過錐齒輪改變旋轉軸方向,與伸縮模塊相連。
2.2.2 清洗刷頭參數
清洗刷頭采用滾筒刷與盤型刷結合的方式,完成池底和池壁的清洗。滾筒刷清洗池底,盤型刷清洗池壁,二者同軸連接。旋轉軸穿過兩個刷頭的中心孔,通過90°錐齒輪改變旋轉軸方向,與伸縮模塊相連。首先對機器人盤型刷進行力學分析,建立力學模型,為參數設計提供理論依據。
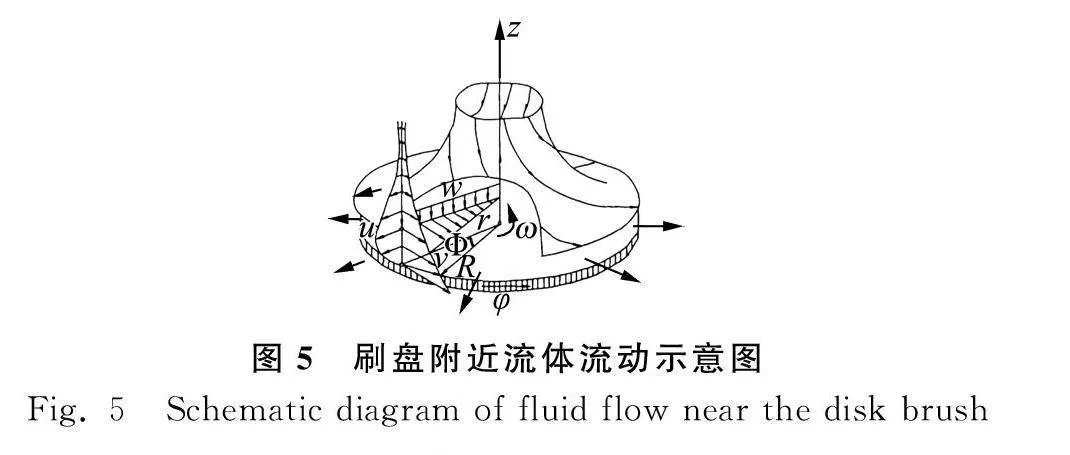
如圖5所示,盤型以角速度ω沿中心軸旋轉,刷絲附近的流體由于摩擦力的作用被轉刷帶動旋轉在離心力的作用下沿刷盤徑向外流出,外部流體會沿轉軸方向流向轉刷中心,流體存在徑向r、周向φ和軸向z三個方向的速度分量分別用u、v和w表示。盤型刷在養殖池池壁清洗時所受的阻力矩包括:水的粘滯阻力矩、刷絲與養殖池表面間的摩擦阻力矩、慣性阻力矩。
水的粘滯阻力矩[12]
MV=0.616πρRP4υω3
(1)
式中:
ρ——水的密度,kg/m;
RP——盤型刷半徑,m;
υ——運動粘度系數;
ω——旋轉角速度,rad/s。
摩擦阻力矩
Mf
=∫RrF1(R2-r2)f·2πdx
=2(R3-r3)3(R2-r3)f·F1
(2)
式中:
F1——盤型刷對養殖池表面正壓力,N;
f——刷絲與養殖池表面的摩擦系數;
R——刷絲分布半徑,m;
r——無刷絲部分半徑,m。
慣性阻力矩
MG=Jε=12RP2m·πn30tJ
(3)
式中:
J——盤型刷轉動慣量,kg·m2;
ε——盤型刷角加速度,r/s2;
m——盤型刷質量,kg;
n——盤型刷轉速,r/min;
t——盤型刷加速時間,s。
盤型刷在水下清洗過程中克服的力矩為M為上述三種力矩之和。
M=MV+Mf+MG
(4)
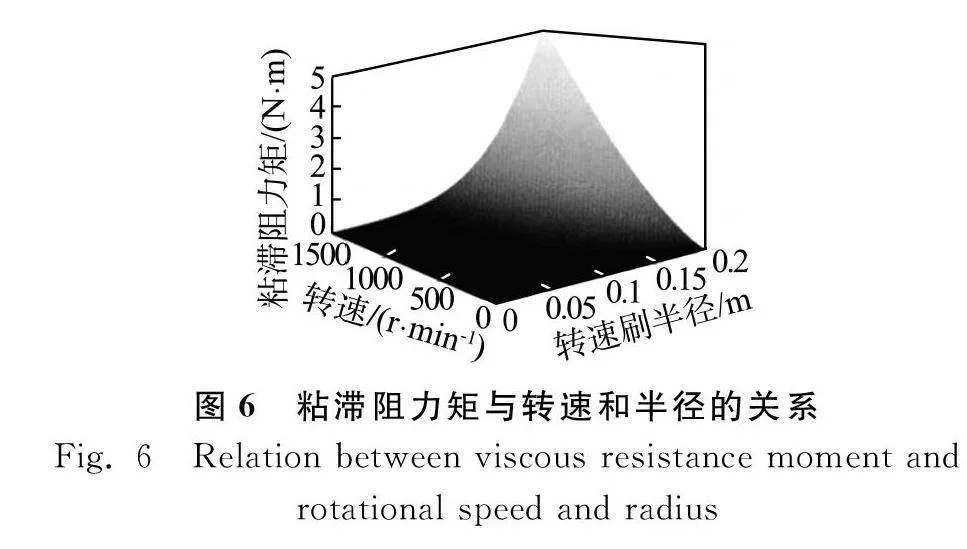
根據以上計算可知,隨著刷盤半徑尺寸的增大,所受阻力也會增大,反之,刷盤尺寸減小,清洗效率會降低,不僅會影響機器人的清潔效率,還會減小刷盤旋轉產生的負壓吸附力,由圖6可知,旋轉盤型刷在水下受到的粘滯阻力矩隨著刷盤半徑的增大和轉速的增加,而顯著的增加。由于機器人所能承受的負載及安裝空間有限,因此要在清洗效果與轉速之間尋找到一個二者都可兼顧,為了解刷盤半徑,刷絲分布疏密等因素對清刷效果的影響,選用三種類型的刷盤進行清洗效果對比試驗,結果見表2。
由表2可知,選用刷絲直徑400 mm,刷絲分布直徑260 mm,刷絲直徑0.4 mm,刷絲分布較密時,清洗效果較好。
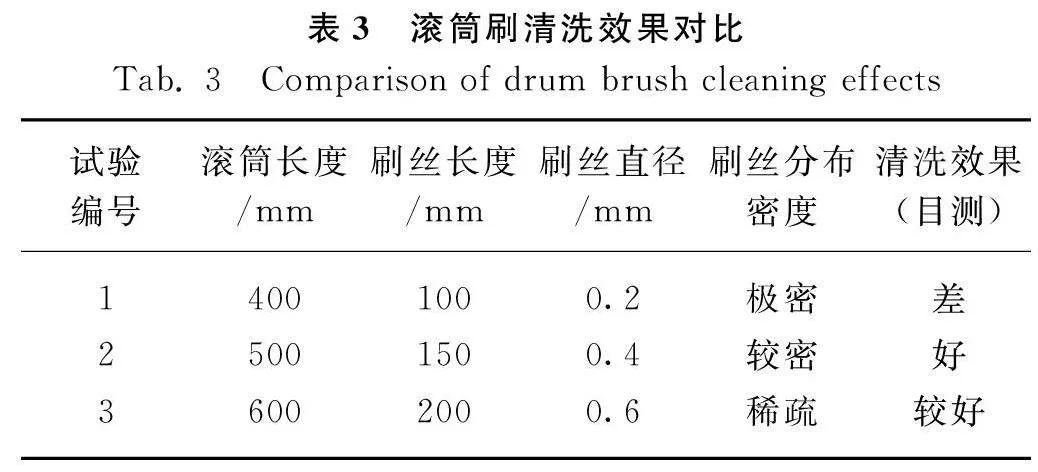
滾筒刷長度越長,與池底接觸面積越大,工作效率就越高。考慮到養殖池底面邊緣高、中心低,有一定的高度差,過長的刷頭會影響清洗效果,因此選取不同長度的滾筒刷進行試驗,結果見表3。由表3可知,選用滾筒長度500 mm,刷絲長度150 mm,刷絲直徑0.4 mm,刷絲分布較密時,清洗效果較好。
3 路徑規劃和避障搜索策略
3.1 路徑規劃
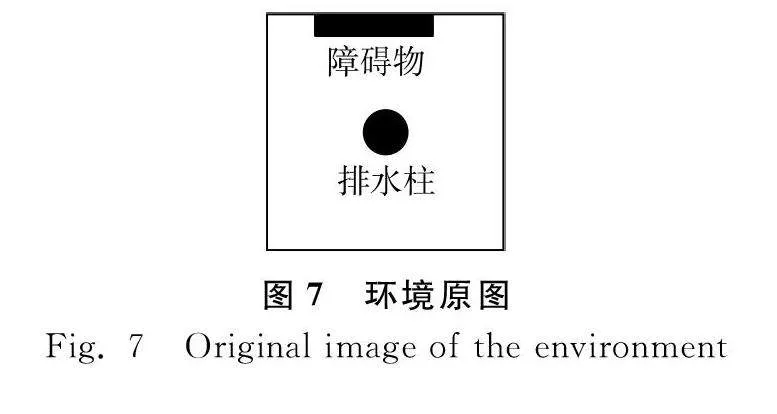
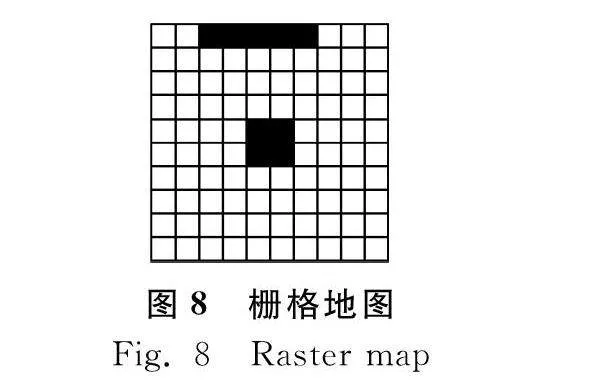
采用柵格法建立環境地圖,然后利用往復式算法遍歷養殖池。圖7為環境原圖,圖8為柵格地圖表示圖。
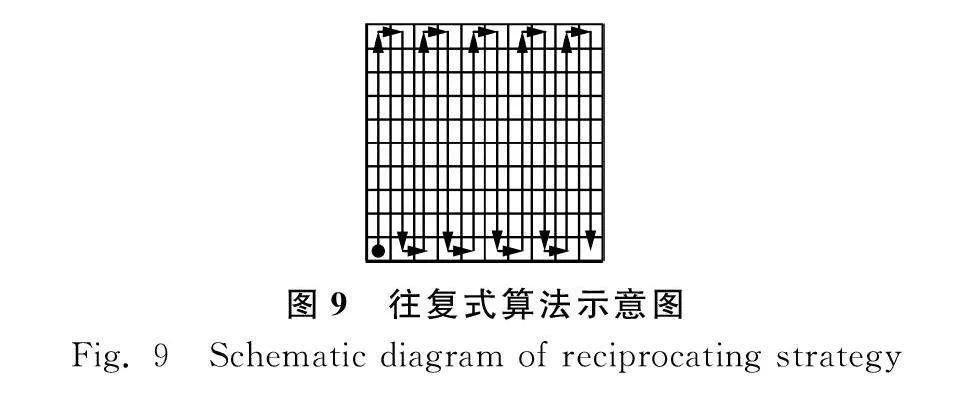
機器人通過位置傳感器獲取機器人本體到養殖池池壁距離、排水柱位置等環境信息,進行柵格量化,根據養殖池邊長及清洗刷頭大小確定柵格尺寸,建立柵格地圖,以此為基礎進行路徑規劃。柵格地圖通常將邊界外以及障礙物內全部標記為1,清洗區域標記為0。通過定義機器人清洗的主要方向,對柵格地圖進行遍歷,查找清洗起始點,當查找到第一個標記為0的柵格,則該柵格記為起始坐標。同時用此方法查找終點,確保做到分區覆蓋。結合養殖池環境特點及機器人自身移動方式,采用算法簡單、易控制、能量消耗少的往復式算法。如圖9所示,機器人從其起點沿直線移動,遇到邊界后轉向,在沿反方向直線移動。直到軌跡覆蓋整個區域。
3.2 避障策略
采用最短切線[13]避障算法,因每個養殖池中心的排水柱位置有差別,需要在全覆蓋路徑規劃的基礎上對機器人進行避障規劃。如圖10所示,最短切線算法將數學領域里的切線定理引入到計算機算法中,用于計算機器人到障礙物所在圓的切線長,對比兩條切線長度,選擇最佳切線路徑繞過障礙物體。
算法首先判斷機器人和目標點之間是否存在障礙物,設定機器人為A,障礙物為B,目標點為C。Ra和Rb分別為機器人和障礙物的碰撞半徑,若距離dgt;Ra+Rb,機器人能夠沿直線達到目標點,且不會碰到B,判定B非障礙物,機器人沿直線到達目標點。若dlt;Ra+Rb,機器人則會碰到B,判定B為障礙物,則需求出繞開障礙物的切線路徑長度,通過對比路徑長短,確定最佳避障路徑。
3.3 搜索策略
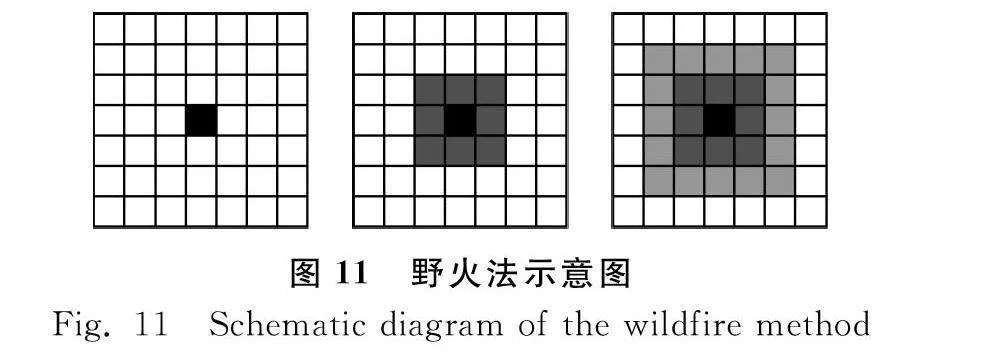
搜索策略采用野火算法和A*算法相結合的方式。清洗機器人遍歷整個養殖池后,還存在部分未覆蓋的柵格。首先采用野火法從起點柵格開始,遍歷周圍鄰近柵格后逐步向外擴散,找到未覆蓋柵格后停止搜索,野火法又稱為廣度優先算法(Breadth-First-Search,BFS)或橫向優先搜索,實現過程類似于地毯式搜索,如圖11所示。
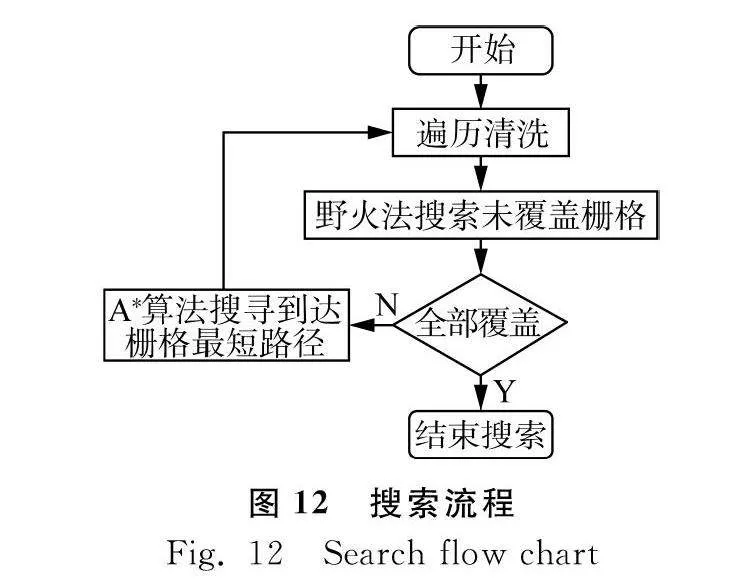
然后,利用A*算法[14]尋找到達目標柵格的最短路徑。A*算法是有方向地進行擴散并且找出最短路徑,對于遍歷點的選擇,路徑選擇優先級的設定除與終點的距離外將與起點的距離同時作為優先級,從而找出最短路徑。通過估價函數:f(n)=g(n)+h(n),比較地圖上任意位置與目標位置之間的距離進行搜索路徑,從而評估、篩選出一個最優路徑進行下一步搜索。其中,f(n)表示從初始狀態經過狀態n到目標狀態的估價函數;g(n)為代價函數,表示為從初始狀態到狀態n的最小成本,h(n)為啟發函數,表示從狀態n到目標狀態的最小估計成本搜索流程如圖12所示。
3.4 全覆蓋算法流程
步驟1:環境建模。機器人通過沿邊學習獲取養殖池環境輪廓,將環境輪廓按照固定長度劃分為等尺寸柵格,根據柵格的不同狀態進行賦值,生成柵格地圖。
步驟2:路徑選擇。機器人按照往復式遍歷策略搜索下一個可行柵格并對已經被覆蓋的柵格屬性值進行修改,循環往復直至機器人當前所處位置鄰域內不存在未被覆蓋柵格。
步驟3:當機器人檢測到障礙物,采用避障策略求出機器人到障礙物之間的距離,選擇最短路徑繞過障礙物。
步驟4:野火法搜尋未覆蓋柵格,假如無法找到,則轉到步驟6,否則轉到步驟5。
步驟5:利用A*算法規劃出從機器人當前位置到步驟4搜索到的柵格之間的最短路徑,按照該路徑到達未覆蓋的柵格。
步驟6:結束搜索。柵格地圖中屬性為0的柵格全部被覆蓋,算法結束。
4 控制系統
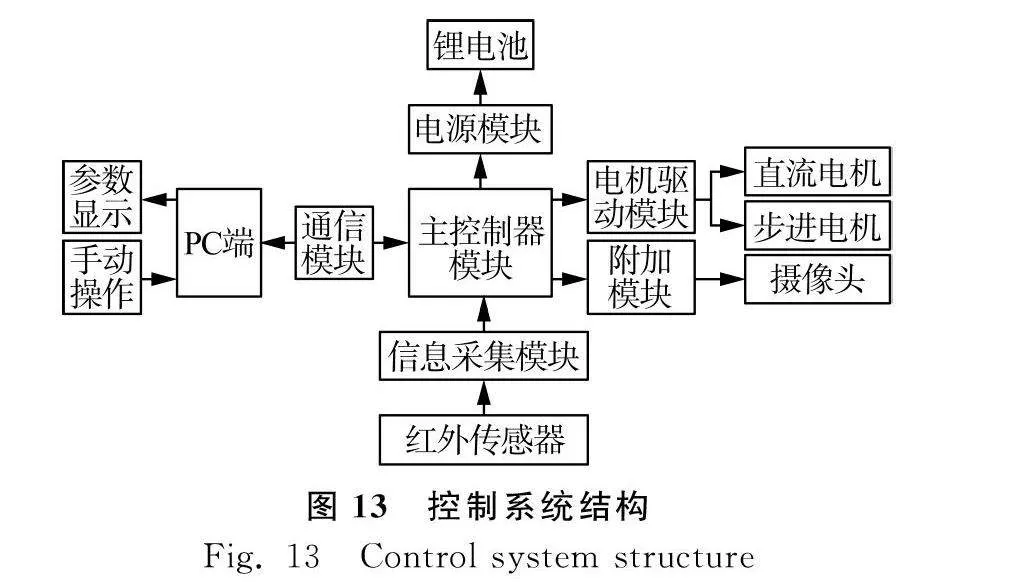
清潔機器人系統結構框圖如圖13所示。選用上位機、下位機分布式控制方式。上位機以PC機為主體,實現人機界面交互。通信模塊,負責下位機與上位機的信息傳遞;手動操作模塊用于工人遙控清洗;參數顯示模塊能夠顯示機器人速度參數。下位機以STM32F103單片機為核心控制器,通過信息采集模塊獲取清洗機器人的工況信息和狀態信息,根據控制算法控制清洗機器人的動作;電機驅動模塊驅動刷頭轉動以及移動機構移動,信息采集模塊收集養殖池環境信息;電源模塊為機器人提供動力。
4.1 主控制器模塊
以STM32F103單片機為核心,實現單片機與傳感器、直流電動機及步進電動機等電子元器件之間的數據傳輸。STM32F103單片機[15]內置定時器,具有A/D轉換功能。機器人清洗速度、刷頭轉速等的設定、傳感器數據接收、存儲、分析以及狀態信息的傳輸通信、輸出、顯示等均由控制器完成。其工作原理為:首先由位置傳感器采集養殖池環境信息,通過I/O數據接口進行傳輸后由單片機對數據進行分析、處理與判斷,最后輸出控制信息并驅動電機按照設定的程序完成清洗。
4.2 通訊模塊
通訊模塊需要傳遞的信息包括機器人進行手動控制和自動控制時控制指令轉換與發送;機器人數據顯示時,上位機狀態與工況信息、下位機信息的采集、發送情況。根據機器人工作環境及實時控制要求,采用RS485作為上下位機通信方式,該通訊方式具有接口電平低,傳輸速率高,抗干擾能力強,傳輸距離遠,支持節點多等特點。
4.3 信息采集模塊
采用具有高靈敏度、高抗干擾、性能穩定等特點的紅外線TCRT5000傳感器[16],通過紅外線檢測機器人到達養殖池池壁及障礙物的距離,然后上傳至STM32F103單片機。
4.4 電機驅動模塊
驅動電機模塊包括步進電機和直流電機。直流電機驅動清洗刷頭,刷頭旋轉不需要精確的速度控制,在此采用開環控制方案,輸入不同的占空比實現不同的轉速,適應不同的清洗需求。步進電機驅動移動機構和清洗機構伸縮組件,電機通過聯軸器與同步帶輪相連,對驅動電機進行速度控制即可控制每個移動機構的速度。
4.5 附加模塊
機器人工作時,需要監測清洗的實時狀態。由于作業環境光線較為昏暗,空氣濕度大,腐蝕性強,選用具有高清、良好防水性以及夜視功能的TP2E高清網絡監控攝像頭監測機器人的工作狀態。
4.6 電源模塊
選用容量為24 Ah的鋰電池組,輸出電壓為24 V,最大輸出電流為90 A,可支持機器人連續工作80 min。
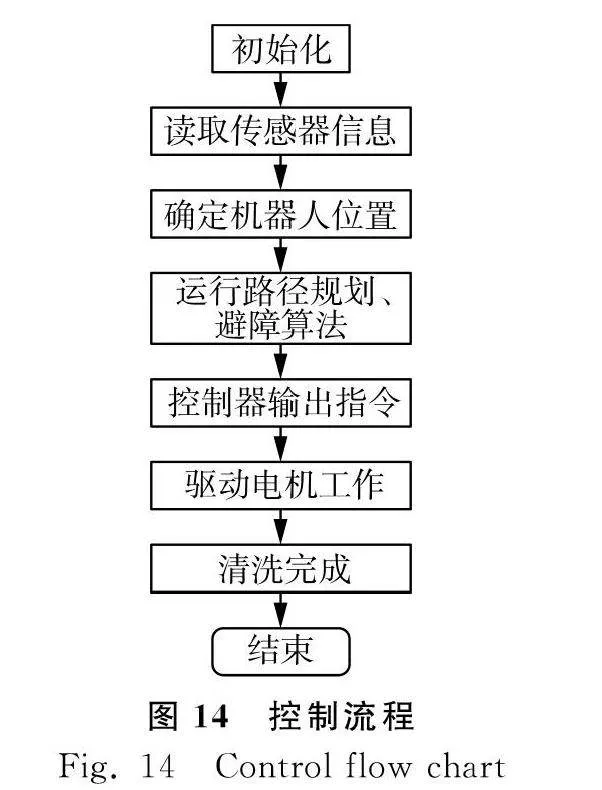
4.7 控制流程
控制流程如圖14所示。程序初始化后,創建機器人執行任務,包括信息采集、運動控制、路徑規劃等。超聲波傳感器采集養殖池信息,包括池壁面積、障礙物位置,并將數據信息上傳至上位機。上位機確定機器人位置,并進行環境建模,執行路徑規劃與避障程序,控制驅動電機完成相應動作。
5 試驗與分析
5.1 試驗條件
本試驗在天津某公司第七養殖車間的長6 m、寬6 m的養殖池內進行,平均水深約為600 cm。測試影響機器人清洗效率的因素。在上述刷頭選型試驗中,已經對刷頭長度,刷毛密度進行對比,在此選用驅動速度、刷盤轉速作為探究清洗機器人性能的主要因素。
5.2 試驗方法
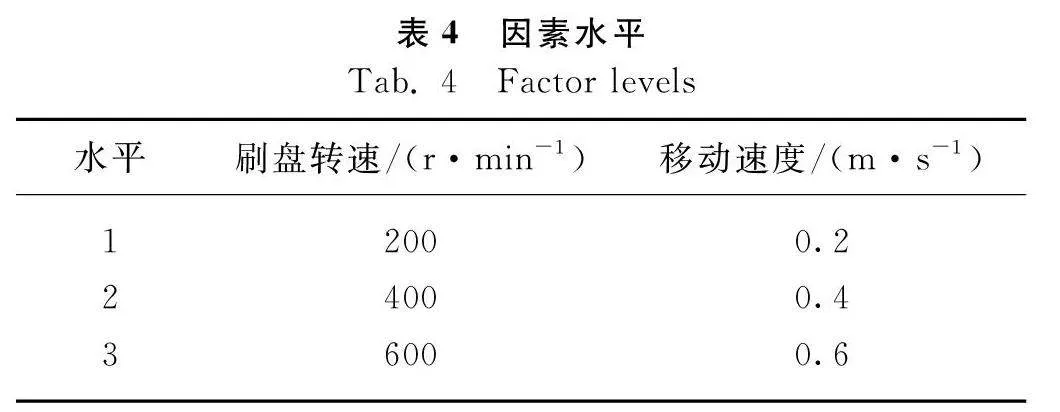
養殖池池水靜置10 h后,池底出現污損生物沉淀層。將水排空后進行清洗作業,清洗完畢后測量并計算清洗面積。根據電池容量大小,確定每組試驗時間均為40 min。以池底、池壁清洗效率作為評判指標,通過正交試驗確定各個因素之間的主次順序,找出清洗效果的最優組合方案。影響因素水平見表4。
5.3 試驗結果與分析
清洗試驗開始,機器人按照規劃路徑清洗整個養殖池,進行9次試驗,每次試驗采用正交試驗中的極差分析法,每組試驗重復3次取平均值。試驗結果見表5。其中A、B為因素編碼值。
從表5可知,通過比較Rj值大小,得出刷盤轉速是影響清洗效果的主要因素,比較k1、k2、k3值大小,得出清洗機器人在規劃的清洗路徑下最優清洗方案為A3B1,即刷盤轉速600 r/min、驅動速度0.2 m/s。
6 結論
1)" 本文針對陸基工廠化養殖池清洗難度大、清洗效率低等問題,對現有水下清洗裝備進行分析研究,設計一款具有自動越池功能的清洗機器人。機器人采用無線控制方式,清洗寬度500 mm,移動速度0.2~0.6 m/s,清洗過程中,機器人移動機構依托導軌在養殖池上方移動,從而帶動具有旋轉伸縮功能的清洗機構清洗、越池、完成整組養殖池的清洗。
2)" 通過對刷頭清洗效果對比和力學模型分析,得出刷頭相關參數。通過傳感器讀取養殖池特征,設計基于柵格地圖的養殖池路徑規劃與避障搜索策略,能夠實現全覆蓋遍歷。
3)" 以刷盤轉速、移動速度為試驗因素,池底覆蓋率和池壁覆蓋率為指標進行正交清洗試驗,結果表明,機器人能夠滿足清洗要求,最佳組合為刷盤轉速600 r/min、驅動速度0.2 m/s。
參 考 文 獻
[1]雷霽霖. 關于當前我國北方沿海工廠化養魚的一些問題和建設[J]. 現代漁業信息, 2002(4): 5-8.
[2]袁夫彩, 陸念力, 王立權. 水下船體清刷機器人關鍵技術及其試驗的研究[J]. 機械設計與研究, 2008(1): 36-38.
Yuan Fucai, Lu Nianli, Wang Liquan, et al. Study on the key technology and experimentation of cleaning robot for underwater ship hull [J]. Machine Design and Research, 2008(1): 36-38.
[3]袁夫彩, 孟慶鑫, 王義文. 水下船體表面清刷機器人吸附及移動性能分析[J]. 哈爾濱工程大學學報, 2006(2): 272-275.
Yuan Fucai, Meng Qingxin, Wang Yiwen. Analysis of adsorption and movement performance of underwater robot for cleaning hull [J]. Journal of Harbin Engineering University, 2006(2): 272-275.
[4]林興月. 水下船體表面清刷機器人結構設計與控制系統研究[D]. 哈爾濱: 哈爾濱工程大學, 2019.
Lin Xingyue. Research of underwater hull surface cleaning robot on structural design and control system [D]. Harbin: Harbin Engineering University, 2019.
[5]張培鋒, 王洪光. 一種新型爬壁機器人機構及運動學研究[J]. 機器人, 2007(1): 12-17.
Zhang Peifeng, Wang Hongguang. Mechanism and kinematics of a new wall-climbing robot [J]. Robot, 2007(1): 12-17.
[6]楊強, 桂堂軍, 冀龍飛, 等. 遙控泳池清洗機的開發設計[J].科技傳播, 2013, 5(11): 80-81, 86.
[7]黃達, 倪琦, 胡勇兵, 等. 水下魚池清刷機器人系統設計與試驗分析[J]. 漁業現代化, 2019, 46(6): 29-34.
Huang Da, Ni Qi, Hu Yongbing, et al. Design and experimental analysis of underwater fish tank cleaning robot system [J]. Fishery Modernization, 2019, 46(6): 29-34.
[8]黃達. 水下魚池清刷機器人關鍵技術研究[D]. 上海: 上海海洋大學, 2020.
Huang Da. Research on key technologies of underwater fish tank cleaning robot [D]. Shanghai: Shanghai Ocean University, 2020.
[9]Li Y, Lo K M. Dynamics and kinematics of novel underwater vehicle-manipulator for cleaning water pool [C]. 2009 International Conference on Mechatronics and Automation. IEEE, 2009: 1196-1201.
[10]肖宏遠. 船體表面水下清刷機器人研究[D]. 哈爾濱: 哈爾濱工程大學, 2017.
Xiao Hongyuan. Research on underwater hull cleaning robot [D]. Harbin: Harbin Engineering University, 2017.
[11]黃小華, 郭根喜, 胡昱, 等. 輕型移動式水下洗網裝置設計[J]. 漁業現代化, 2009, 36(3): 49-52.
Huang Xiaohua, Guo Genxi, Hu Yu, et al. Research on designing light mobile underwater net washing equipment [J]. Fishery Modernization, 2009, 36(3): 49-52.
[12]楊興宇. 船體水下除海生物機器人結構設計及關鍵技術研究[D]. 天津: 河北工業大學, 2019.
Yang Xingyu. Structure deign and key technology research of hull underwater clear sea creature robot [D]. Tianjin: Hebei University of Technology, 2019.
[13]倪天偉, 林金珠. RoboCup3D仿真中雙足機器人路徑規劃的最短切線路徑算法[J]. 蚌埠學院學報, 2017, 6(3): 1-3.
Ni Tianwei, Lin Jinzhu. The shortest tangent path planning for biped robot in RoboCup3D simulation environment [J]. Journal of Bengbu University, 2017, 6(3): 1-3.
[14]張月. 基于改進A*算法的路徑規劃方法研究[D]. 長春: 吉林大學, 2022.
Zhang Yue. Research on path planning method based on improved A* algorithm [D]. Changchun: Jilin University, 2022.
[15]Liu X, Li Y. Intelligent car control system based on STM32 single chip microcomputer [J]. Beijing: Electronic World, 2020: 164-165.
[16]吳鵬浩, 徐夢如, 竇浩鵬, 等. 基于STM32單片機的掃地機器人設計[J]. 智能計算機與應用, 2019, 9(6): 248-250, 253.
Wu Penghao, Xu Mengru, Dou Haopeng, et al. Design of sweeper robot based on STM32 single chip microcomputer [J]. Intelligent Computer and Applications, 2019, 9(6): 248-250, 253.