基于模糊控制的溫室氣候控制器設計
2024-12-31 00:00:00王麗娜曹建安王蓮花姚亞平
中國農機化學報 2024年7期

摘要:為解決獼猴桃基地“瑞玉”新品種苗木繁育中農業大棚溫濕度控制精度、速度、穩定性的難題,依托獼猴桃育苗玻璃溫室,設計適合農作物生長的環境因子模糊控制系統。該系統針對溫室環境中溫濕度的強耦合規律,在控制中增加溫濕度解耦算法,通過建立不對稱溫濕度補償規則庫,將溫度、濕度模糊控制的輸出變量和解耦補償輸出合成后得出實際溫濕度控制輸出,對農業大棚的溫濕度控制過程進行改善,優化大棚環境監控效果。結果表明:空氣溫度、空氣濕度、光照強度控制精度分別達到了±2℃、±5%RH、±200 Lux,達到穩態時間分別為9 min、16 min、4 min,且基本保持穩定,本系統控制精度較高、調節速度快、魯棒性好,具有較好的實用價值和推廣價值。
關鍵詞:溫室;環境調控;農業大棚;模糊控制;模糊解耦
中圖分類號:S625.5+1; TP273+.4
文獻標識碼:A
文章編號:20955553 (2024) 070075
06
Design of greenhouse climate controller based on fuzzy control
Wang Lina1, Cao Jian’an2, Wang Lianhua1, Yao Yaping1
(1. Shaanxi Academy of Modern Agricultural Sciences, Xi’an, 710000, China;
2. Xi’an Jiaotong University, Xi’an, 710000, China)
Abstract:
In order to solve the problem of temperature and humidity control accuracy, speed and stability in agricultural greenhouse during the breeding of “Ruiyu” new variety seedlings in the kiwifruit base, a fuzzy control system of environmental factors suitable for crop growth was designed in this paper by using the glass greenhouse for kiwi seedling cultivation. For the strong coupling law of temperature and humidity in the greenhouse environment, this system added a decoupling algorithm of temperature and humidity to the control. By using the temperature and humidity decoupling parameters to establish the asymmetric temperature and humidity compensation rule base in this system, the output variables of fuzzy control of temperature and humidity and decoupling compensation output were synthesized to obtain the actual temperature and humidity control output, which improved the temperature and humidity control process of agricultural greenhouses and optimized the monitoring effect of greenhouses. Practical data showed that the control accuracy of air temperature, air humidity and light intensity reached ±2℃, ±5%RH and ±200 Lux respectively. At the same time, the time to reach the stable state was 9 min, 16 min and 4 min respectively, and basically remained stability. The practical application showed that this system had high control precision, fast adjustment speed and good robustness, which had a good practical value and promotion value.
Keywords:
greenhouse; environment control; smart agricultural shed; fuzzy control; fuzzy decoupling
0 引言
傳統的經典控制理論通常應用在單輸入及輸出系統,即SISO(single input single output),以傳遞函數為基礎拉普拉斯變換為工具,在頻率域中分析設計,以PID控制和校正網絡為設計方法,直觀實用,但是難以實現最優控制,且傳統控制器都需要先為被控目標建立確切數學模型,在時變、多變量、非線性系統難以有效應用。
在實際應用中,有不少控制對象和生產工藝無法或者很難用簡單的數學、物理等方面的公式來描述,以至于在建立簡化數學模型估算參數時,對原系統不能準確地表示,因為取得的參數根本不能包含所有信息特征,以至于建模過程沒有太大價值。還有的控制對象建立模型非常復雜,主要原因是其變化受很多種因素影響,各因素間又存在交叉耦合。也有少許生產工藝數學模型沒辦法建立是因為測試裝備無法進場測試或根本沒有符合實際的測試方法。隨著控制系統涉及越來越多的非線性、多參數、時變,傳統控制技術的準確性和當前系統的復雜性呈現出明顯的沖突,最大的問題就是不可能或者難以建立確切的數學模型,不能準確地量化復雜對象的實際狀態。后來發展起來的自適應控制技術在一段時間內解決了部分問題,但適用的范圍很有限。
隨著現代控制系統理論的發展,產生和實踐出了模糊控制,總結工藝操作經驗[1],建立模糊集合,利用語言規則進行模糊邏輯推理和決策,從而對復雜對象進行控制,逐漸成為智能控制的關鍵部分。模糊控制論的誕生是以1974年美國Mamdani在實驗室把模糊控制應用于鍋爐和蒸汽機控制取得成功作為標志,這一創新離1965年Zadeh提出理論有9年時間,1975年又在丹麥建造了模糊控制水泥窯。到80年代日本仙臺地鐵開通,成為當時最先進的地鐵系統,自此很多家用電器、智能樓宇、電梯升降機[2, 3]等采用模糊控制算法開發,并接連研制成功投入市場。模糊集合理論,其本質是對復雜的工藝或者過程建立計算機語言的數學模型[4],讓模糊語言被PC或處理器接受,不僅成為解決客觀模糊性問題的工具,也順應了自適應控制的發展需求[5]。
在冬季,大棚中的溫度監測與控制最初常采用PID控制。但是選用常規PID控制抗干擾能力比較差,參數也不易在線調整,且易產生超調。最初,余泳昌等[6, 7]提出的改進型PID控制算法在抗干擾上比傳統PID算法得到了提高,參數有了較精確的調整,在現代溫室控制應用中,使溫度控制在最適宜的范圍。但還存在很多問題,如參數整定的問題,參數整定時間較長;如純時延的問題,有些參數整定后不能適應整個過程變化,這些問題導致了控制性能下降。后來,汪小旵等[8]研究提出了大棚溫度的模糊控制,該控制算法表明加熱系統的靜差為0.5℃,控制最大動偏差為1.5,過渡過程波動較小,沒有負偏差,系統穩定,更加符合農業生產要求。范錦杰[9]在基于模糊控制的滴灌施肥自動控制系統研究中,對棉田滴灌施肥控制采用了單純的模糊控制算法,通過水肥EC值不同配方條件、水肥pH值不同輪灌條件下的試驗測試,模糊控制具有更好的動態性能,更低的超調量和調節時間。在配方1、輪灌條件1試驗中,模糊控制策略下系統的超調量以及調節時間分別比PID控制下的減小了13.69%、23 s和9.17%、17 s。
PID控制通常對研究目標的數學模型要求比較高,導致在溫室環境控制實踐應用中難以發揮其優勢[10]。隨著實踐應用,模糊算法被巧妙地應用在大棚控制中,并逐漸表現出優勢。模糊控制中各因素耦合的現象是溫室控制研究的一個關鍵點,且國內設施園藝在品種培育中環境調控能力弱[11],缺少技術支撐,以至于高品質品種少、推廣慢。在控制過程中,各環境因素間互相影響變動[12],如果分開獨立考慮難以實現整體統一控制,大大影響控制效果。本文對耦合現象尤其是溫濕度耦合問題進一步研究,設計模糊控制及模糊解耦控制方案,加入解耦算法,以補償的方式盡可能消除或弱化各輸入、輸出量間相互關聯的耦合關系。同時擴大技術應用推廣,對溫室控制的發展和農業新品種的培育有非常重要的意義。
1 農業大棚控制算法
溫室大棚氣候控制的特點:比一般的工業環境控制要復雜的多,可能面臨惡劣的氣候環境,還受到農戶經驗及種植技術水平的影響。溫室大棚控制[13, 14]是多參數的控制,環境因子[15]包括光照、水分、溫度、空氣(如二氧化碳、氧氣等)、土壤、生物條件等。而玻璃聯動溫室面積大,調控中溫度、濕度等存在分布不均勻現象,調控不能立即達到目標值,存在一定的滯后,且各參數值是實時變化的,控制過程也是非線性控制。同時各影響因子存在耦合現象,存在互相影響的復雜情況,控制過程很難達到精準、靈敏的要求。
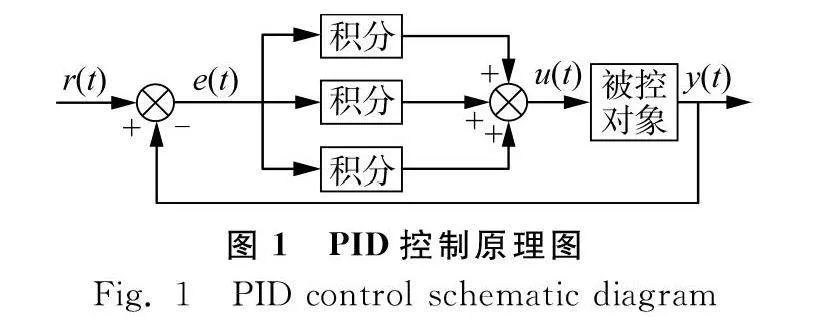
PID控制是工業自動控制中應用最廣、產生也最早的控制方法。PID控制原理如圖1所示,其調節的本質是根據輸入的偏差值,按積分、比例、微分的函數關系進行運算,將結果輸出控制對象。
PID控制主要通過控制目標值與實際值的誤差來確定消除誤差的控制策略,適合一些比較簡單的單輸入、單輸出線性系統。通常,在大棚實際控制過程中,為提高系統控制精度和動態調節性能,要對傳統PID控制進行改進,改進方法主要有變速積分PID控制、積分分離PID控制、不完全微分PID控制等。合理選擇微分系數、積分系數、比例系數,對PID控制器采用四點中心差分法來提高系統抗干擾能力。
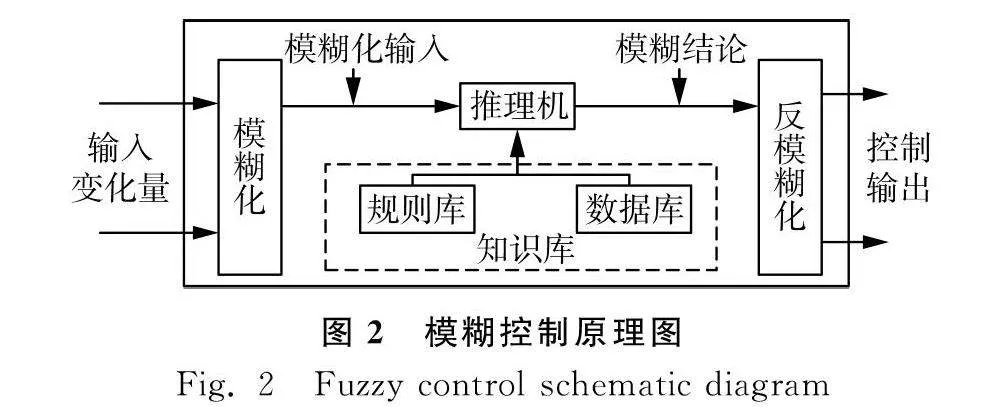
基于模糊控制算法有許多良好的特性,不需要事先知道對象的數學模型,調節速度快,魯棒性好等[16, 17],并且能緩解工況條件變化對系統造成的影響,本系統根據玻璃溫室內獼猴桃的育苗場景選用模糊控制策略。模糊控制器是模糊控制的核心[18]。圖2是本系統用到的模糊控制器原理圖,從圖2中可以看出,變量輸入到輸出的模糊控制過程。
本控制系統中,傳感器采集大棚中的溫度、濕度和光照強度,需要控制的設備包含加熱器、補光燈、遮陽板、風機和濕簾。溫室環境中要控制的因子很多,根據相關的研究,溫度對作物來說是最重要的[19],因此需要更精準的控制,濕度和光照強度的影響不太顯著,可以適當放寬調控范圍。
根據獼猴桃育苗特性,獼猴桃種子發芽要求的環境參數更苛刻,適宜的空氣溫度為15℃~21℃,空氣濕度為65%RH~85%RH,光照強度為1 000~1 800 Lux。本研究擬設計目標:濕度波動±5%RH,光照強度波動±200 Lux,溫度波動±2℃,以達到育苗條件要求。
本系統的控制是根據偏差范圍來選擇。即模糊控制是當濕度在±15%RH或溫度在±6℃以內時選擇;當溫度偏差值大于±6℃或者濕度偏差值大于±15%RH,選擇確定控制,進行最大的調節。因此,模糊控制是本系統設計的重點。
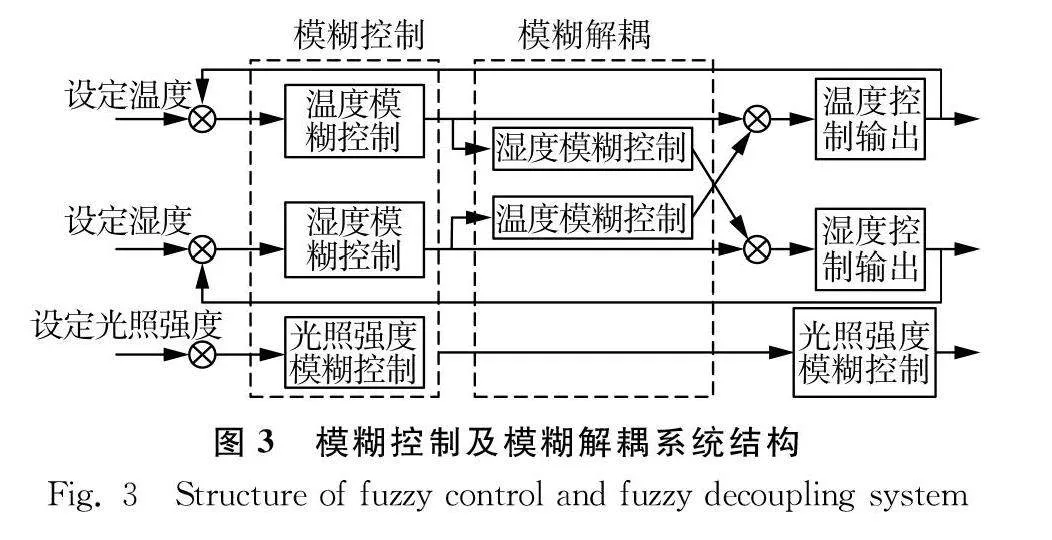
模糊控制系統結構實現如圖3所示,將溫度、濕度模糊控制的輸出變量和解耦補償輸出合成以后得出實際的溫濕度控制輸出,光照強度的實際輸出就是光照強度的模糊輸出。
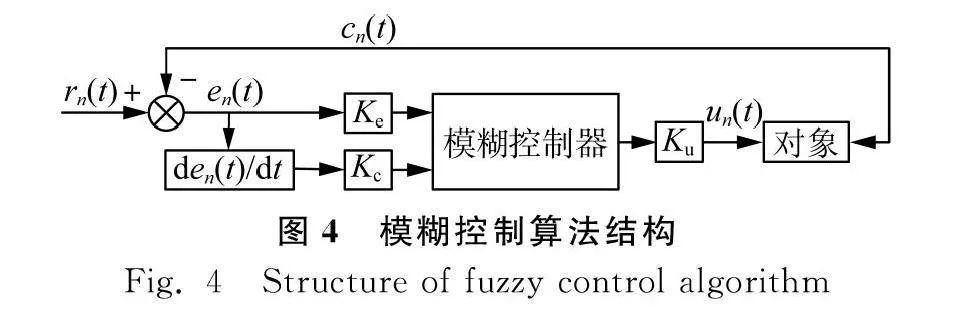
模糊控制算法單元的結構如圖4所示。定義rn(t)為閾值,即系統設定的溫度、濕度與光照目標值;cn(t)為控制系統中傳感器采集的溫度、濕度與光照的實際值;en(t)為目標值與實際值的偏差值,單位分別為℃、%RH、Lux;ecn(t)為偏差變化率,單位分別為℃/min、%RH/min、Lux/min,且ecn(t)=den(t)/dt,表示大棚中溫度、濕度與光照強度的變化趨勢;Ke、Kc、Ku分別為輸入輸出的量化因子,可以根據實際控制進行設定;un(t)為輸出量,用于控制大棚的補光、遮陽、加熱器、風機與加濕器的運行與關閉。定義e1(t)=r1(t)-c1(t)為溫度偏差值,單位為℃;e2(t)=r2(t)-c2(t)為濕度偏差值,單位為%RH;e3(t)=r3(t)-c3(t)為光照強度偏差值,單位為Lux。根據溫室大棚控制系統的特點,使用二維結構,即采用偏差en(t)和偏差變化率ecn(t)作為模糊控制器的輸入參數。
2 模糊控制器實現
2.1 模糊化
輸入變量需要先經模糊控制器進行模糊化,即將實數輸入量轉換為模糊集合和對應的隸屬度。本文模糊控制器的模糊化就是將輸入的三個參數的偏差en(t)和偏差變化率ecn(t)執行模糊化的流程,即建立隸屬函數得到隸屬度。這里主要對溫度的模糊化進行說明,本系統中濕度、光照強度控制算法的模糊化基本一樣,以此類推。
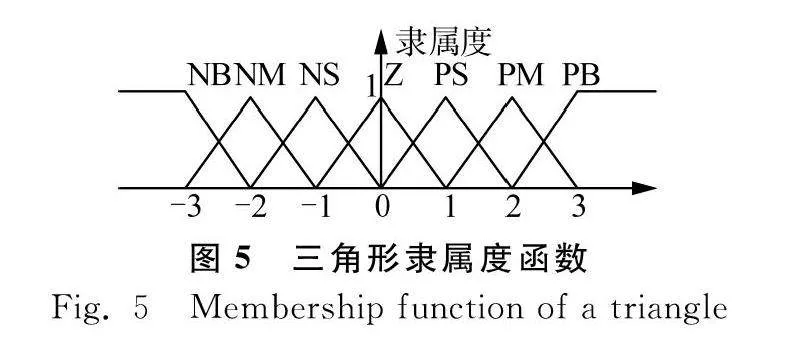
根據設計要求,溫度的控制范圍為±6℃,所以溫度偏差e1(t)的基本論域為[-6,6],根據控制精度±2℃,將它離散為7個等級,量化因子Ke=0.5;變化率的取值范圍±0.1℃/min,ec1(t)的基本論域為[-0.1,0.1],將它離散為7個等級,量化因子Kc=30。溫度偏差變化率和偏差論域為{-3,-2,-1,0,1,2,3},分別對應7個等級,NB-負大,NM-負中,NS-負小,Z-零,PS-正小,PM-正中,PB-正大。
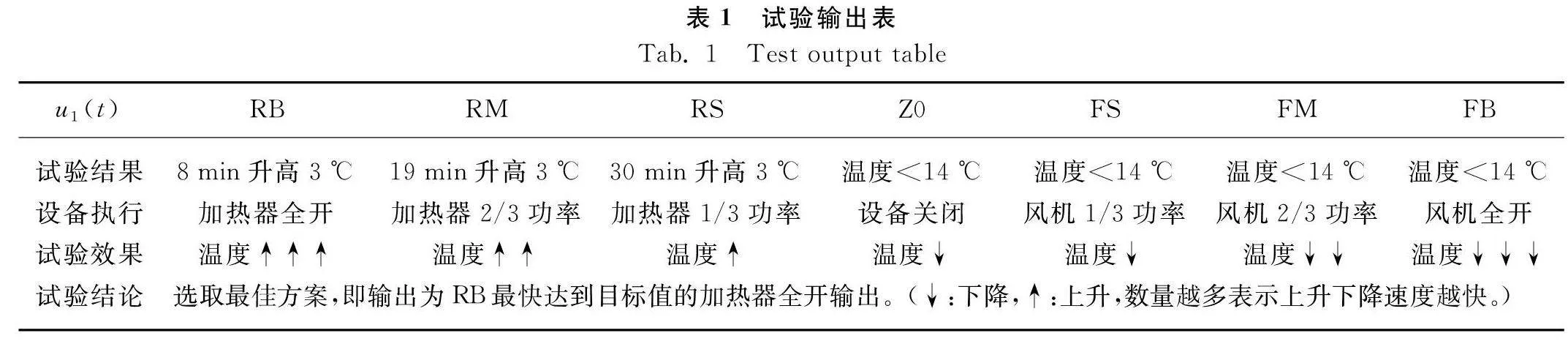
在本系統控制終端加熱器、風機與溫度相關。控制輸出變量u1(t)論域為{-3,-2,-1,0,1,2,3},對應FB(排風扇全功率),FM(排風扇2/3功率),FS(排風扇1/3功率),Z0(排風扇與加熱器均關),RS(加熱器1/3功率),RM(加熱器2/3功率),RB(加熱器全開)七個等級。濕度控制與光照控制的輸出也采取類似的模糊化過程。基于大棚控制特點,偏差、偏差變化率、輸出變量選用三角形隸屬度函數,如圖5所示。
2.2 規則庫與推理
規則庫集合了專家知識和技術熟練的操作工經驗,是根據人類思維進行推理的語言表現方法。輸入到輸出的映射,經常使用“如果…那么”的規則[20],即if…then…語句來表示,或者if…is…and…is…then…is…。本系統用如下語句,即If en(t) is RB and ecn(t) is RB then un(t) is RB表示控制規則。
本系統模糊控制器有兩個輸入變量,一個輸出變量。en(t)、ecn(t)、un(t)均有7個模糊子集。因涉及規則比較多,此處部分試驗如下。
情況1:實際溫度14℃,設定17℃為目標溫度,比實際高3℃,溫度變化率是-0.1。
情況2:設定溫度比實際高0℃,溫度變化率是0℃/min。
un(t)分別有7種輸出,試驗結果如表1所示。
if語句分別為:
If e1(t) is RB and ec1(t) is RB
If e1(t) is Z and ec1(t) is Z
對于情況2根據經驗不做現場試驗,選取正確方案,即輸出為Z0保持當前溫度,設備關閉。
得出情況1和情況2的兩條規則如下:
If e1(t) is PB and ec1(t) is PB then u1(t) is RB
If e1(t)is Z and ec1(t) is Z then u1(t) is Z0
經反復試驗修正,與獼猴桃育苗各生長階段的需求結合得到控制規則見表2。
表2存放在規則庫中,推理機根據規則表獲得控制規則。規則的多少和變量子集劃分有關,取值多,規則就多,但規則多并不能說明規則正確率就高,它的正確性還跟專家經驗的正確性有關。
模糊推理是將變量輸入同規則庫進行比較,激活與當前情況匹配的規則,得出隸屬度,再激活規則度適用的結論,從而得到模糊集合和隸屬度。匹配適用規則的方法就是推理機推理的過程,這里采取靠近的原則防止超調,即當規則的隸屬度μpregt;0,那么該規則被激活。
μpre=min{μi(en(t)),μi(ecn(t))}
(1)
式中:
μpre ——該規則的隸屬度;
μi(en(t)) ——
在i模糊子集上的偏差隸屬度;
μi(ecn(t))——
在i模糊子集上的偏差率隸屬度。
如果溫度偏差e1(t)=1且溫度變化率ec1(t)=0.5,可以得到溫度輸入變量的隸屬度,即μPS(e1(t))=1;μZ(ec1(t))=0.5,μPS(ec1(t))=0.5。參考規則表有兩個規則被激活:規則1,If e1(t) is PS and ec1(t) is Z then u(t) is RS。規則2,If e1(t) is PS and ec1(t) is PS then u(t) is RB。
利用取小原子法表示規則1的隸屬度為
μpre=min1,0.5=0.5
規則1隸屬度為0.5,前件大于0,就采用規則前件推薦的結論。對規則1的推理隸屬函數如式(2)所示。
A(u1)=A(min0.5,μRS(u))
(2)
以此類推規則2的前件確信度也是0.5,即用Mamdadi直接推理法把激活的規則的結論進一步推理就完成了推理過程。
2.3 模糊補償解耦
在大棚監控系統中,環境溫濕度的改變對溫室作物生長影響程度最大,耦合程度也較大[21],必須采用模糊補償對溫度與濕度的強耦合解耦,即對溫度、濕度模糊控制輸出,再一次根據專家經驗分別進行解耦推理從而得出模糊補償控制輸出。
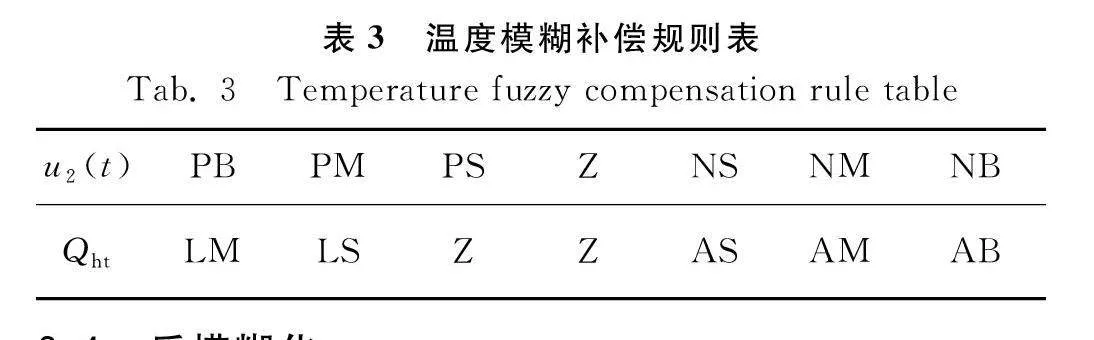
根據專家經驗,除了溫濕度本身的耦合現象,最主要的是設備運行中對溫濕度的耦合影響,例如風機降溫的同時,降濕效果也很明顯,所以溫度降低對濕度影響非常大,補償也大,但溫度升高對濕度影響很小,補償也小;濕度降低時對溫度影響也很大,補償也比較大,相反對溫度影響相對較小,補償也比較小。根據溫濕度耦合規則,定義u2(t)為濕度模糊控制輸出,Qht為濕度對溫度的補償輸出。模糊補償變量用不對稱論域來表示,即{-1.5,-1,0,1,2,2.5},對應{LM,LS,Z,AS,AM,AB}六個模糊集合,也采用三角形隸屬函數。最終得到溫度模糊補償規則見表3。濕度模糊補償規則表與之類似。
2.4 反模糊化
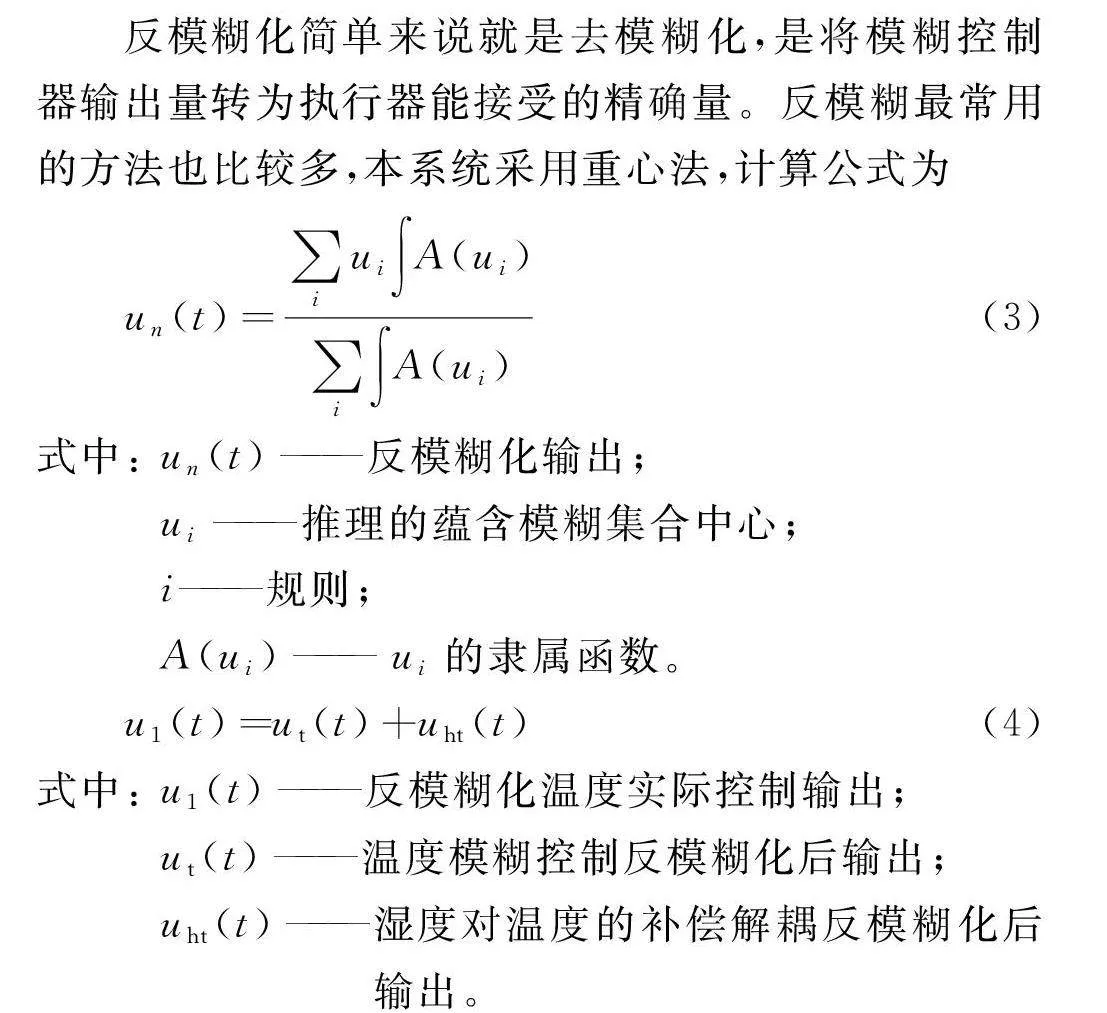
反模糊化簡單來說就是去模糊化,是將模糊控制器輸出量轉為執行器能接受的精確量。反模糊最常用的方法也比較多,本系統采用重心法,計算公式為
un(t)=∑iui∫A(ui)∑i∫A(ui)
(3)
式中:
un(t)——反模糊化輸出;
ui——推理的蘊含模糊集合中心;
i——規則;
A(ui)——ui的隸屬函數。
u1(t)=ut(t)+uht(t)
(4)
式中:
u1(t) ——反模糊化溫度實際控制輸出;
ut(t) ——
溫度模糊控制反模糊化后輸出;
uht(t) ——
濕度對溫度的補償解耦反模糊化后輸出。
3 系統試驗與結果分析
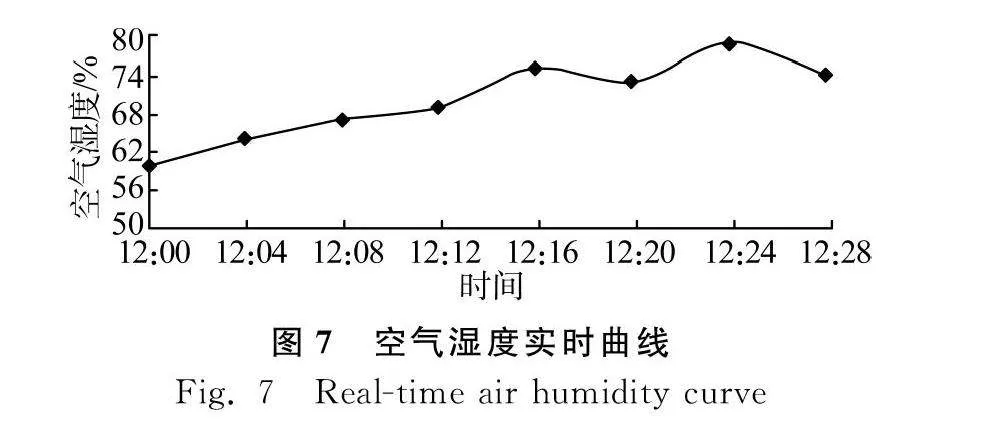
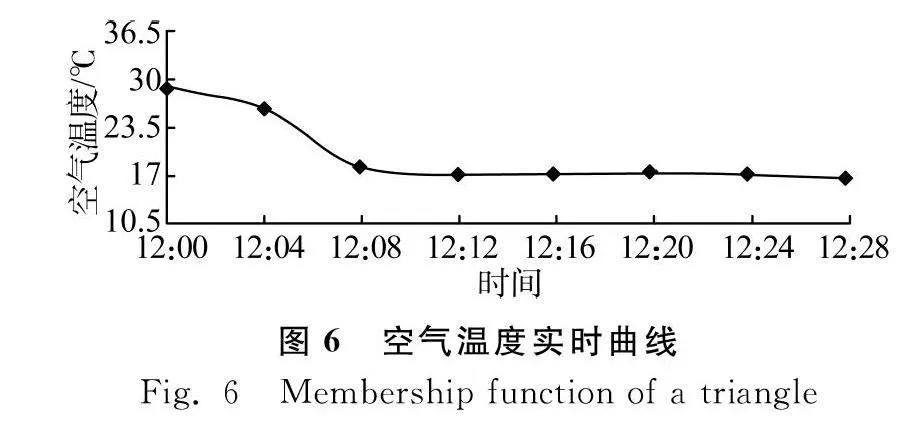
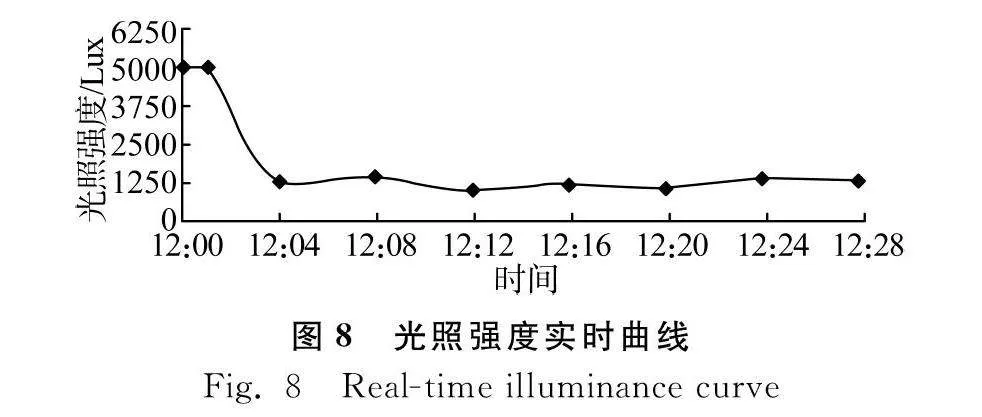
獼猴桃種子播種試驗:當前溫度28.9℃、濕度60.1%RH、光照強度5 030 Lux,設置發芽環境參數為空氣溫度17℃,空氣濕度為75%RH,光照強度為1 200 Lux,經過育苗大棚軟件平臺實施運行,3個指標參數變化曲線如圖6~圖8所示。
空氣溫度實時曲線表明經過本系統環境控制,空氣溫度約9 min達到穩態,且基本保持穩定,波動范圍未超過±2℃。
空氣濕度實時曲線表明經過本系統環境控制,空氣濕度約16 min達到穩態,并出現波動,波動范圍未超過±5%RH。
光照強度實時曲線表明經過本系統環境控制,光照強度約4 min達到穩態后出現一定的波動,波動范圍未超過±200 Lux。
根據獼猴桃育苗特性,獼猴桃種子發芽要求的環境參數更苛刻,即適宜空氣溫度15℃~21℃,空氣濕度65%RH~85%RH,光照強度1 000~1 800 Lux。經過實際實施,滿足了發芽環境要求,空氣溫度、濕度、光照強度完全達到了濕度波動±5%RH,光照強度波動±200 Lux,溫度波動±2℃預期設計目標,且達到穩態時間分別為9 min、16 min、4 min,可以為獼猴桃育苗各個階段的環境參數控制提供技術支持,實現相對恒溫恒濕和光照需求的環境要求。
4 結論
1) 針對實踐中獼猴桃“瑞玉”新品種的苗木培育關鍵技術環節出現的大棚溫度、濕度參數互相影響,控制精度、速度、穩定性尚待提升的難題,設計適合農作物生長的環境因子模糊控制系統,通過建立不對稱溫濕度補償規則庫,利用模糊解耦控制算法優化控制系統參數。
2) 實踐應用中,通過該控制系統,空氣溫度、空氣濕度、光照強度保持在±2℃、±5%RH、±200 Lux波動范圍之內,達到穩態時間分別為9 min、16 min、4 min,且基本保持穩定。實現設計目標,系統調節精度高、速度快、魯棒性好。
3) 本項目的實施使獼猴桃苗木培育關鍵技術環節更加標準化,提高繁育成活率,為新品種示范推廣提供技術保障,替換市場上的老舊品種。且可以用于高等花卉、蔬菜等對環境要求較高的高品質植物種植,對設施園藝產業自動調控能力比較弱,品種培育條件不足的現狀有很大的改善,推廣應用價值高。
參 考 文 獻
[1]Ghalehnoie M, Akbarzadeh-Tootoonchi M R, Pariz N. Fuzzy control design for nonlinear impulsive switched systems using a nonlinear Takagi-Sugeno fuzzy model [J]. Transactions of the Institute of Measurement and Control, 2020, 42(9): 1700-1711.
[2]黃廣國, 薛彥飛. 基于模糊決策算法的室內空調溫度遠程優化控制系統設計[J]. 現代信息科技, 2022, 6(20): 19-21, 25.
Huang Guangguo, Xue Yanfei. Design of indoor air conditioning temperature remote optimal control system based on fuzzy decision algorithm [J]. Modern Information Technology, 2022, (20): 19-21, 25.
[3]張百盛. 基于模糊PID控制算法的溫控系統設計研究[J]. 科技傳播, 2022, 14(13): 126-130.
[4]楊軼霞, 陳浩龍. PLC在污水處理模糊控制中的應用[J]. 數字技術與應用, 2019, 37(8): 9, 11.
Yang Yixia, Chen Haolong. Application of PLC in fuzzy control of sewage treatment [J]. Digital Technology amp; Application, 2019, 37(8): 9, 11.
[5]蔡紅梅. 基于模糊PID算法的溫度自適應控制[J]. 科學技術創新, 2022(32): 69-72.
Cai Hongmei. Temperature adaptive control based on fuzzy PID algorithm [J]. Scientific and Technological Innovation, 2022(32): 69-72.
[6]余泳昌, 薛文芳, 馬建民. 改進型PID控制算法在現代溫室環境參數控制中的應用[J]. 河南農業大學學報, 1999, 33(2): 183-185, 210.
[7]Setiawan A, Albright L D, Phelan R M. Application of pseudo-derivative-feedback algorithm in greenhouse air temperature control [J]. Computers and Electronics in Agriculture, 2000, 26(3): 283-302.
[8]汪小旵, 丁為民. 溫室內溫度的模糊控制[J]. 南京農業大學學報, 2000, 23(3): 110-113.
Wang Xiaochan, Ding Weimin. Fuzzy control of temperature in greenhouse [J]. Journal of Nanjing Agricultural University, 2000, 23(3): 110-113.
[9]范錦杰. 基于模糊控制的滴灌施肥自動控制系統的研究 [D]. 石河子: 石河子大學, 2021.
[10]趙斌, 王克奇, 匡麗紅, 等. 我國溫室環境的模糊控制技術應用現狀[J]. 自動化儀表, 2008, 29(5): 1-4, 8.
Zhao Bin, Wang Keqi, Kuang Lihong, et al. Current situation of fuzzy control technique applied in greenhouse environment in China [J]. Process Automation Instrumentation, 2008, 29(5): 1-4, 8.
[11]姜姍. 我國設施園藝發展現狀與趨勢分析[J]. 智慧農業導刊, 2021, 1(12): 5-8.
Jiang Shan. An analysis of the present situation and trend of protected horticulture in China [J]. Journal of Smart Agriculture, 2021, 1(12): 5-8.
[12]郭曉姿. 多變量解耦模糊控制在果蔬保鮮智能監控系統中的應用[D]. 秦皇島: 河北師范科技學院, 2022.
[13]胡金山, 王熙. 基于PLC、MCGS組態技術的北方寒地溫室環境監控系統設計[J]. 江蘇農業科學, 2015, 43(10):" 510-512.
[14]李將, 俞阿龍, 蔡文科, 等. 基于ZigBee和GPRS的溫室控制系統研究[J]. 江蘇農業科學, 2015, 43(10): 494-497.
[15]邢希君, 宋建成, 吝伶艷, 等. 設施農業溫室大棚智能控制技術的現狀與展望[J]. 江蘇農業科學, 2017, 45(21): 10-15.
[16]王前洪. 模糊控制理論的特點及應用[J]. 河南科技, 2014(18): 105.
[17]劉洪靜, 李黎, 高金輝. 基于模糊PID控制的節水灌溉智能控制系統設計[J]. 節水灌溉, 2020(2): 88-91, 95.
Liu Hongjing, Li Li, Gao Jinhui. Design of water-saving irrigation intelligent control system based on fuzzy-PID control [J]. Water Saving Irrigation, 2020(2): 88-91, 95.
[18]蔡有杰, 吳志東, 李明, 等.基于模糊控制的變量式噴藥系統設計及仿真分析[J]. 齊齊哈爾大學學報(自然科學版), 2020, 36(1): 15-17, 22.
Cai Youjie, Wu Zhidong, Li Ming, et al. Design and simulation analysis of variable injection system based on fuzzy control [J]. Journal of Qiqihar University (Natural Science Edition), 2020, 36(1): 15-17, 22.
[19]Gieling T H, Janssen H J J, Straten G V, et al. Identification and simulated control of greenhouse closed water supply systems [J]. Computers and Electronics in Agriculture, 2000, 26(3): 361-374.
[20]金愛娟, 鄭天翔, 紀晨燁, 等. 基于模糊自適應PID控制的速度調節器設計與仿真[J]. 電子科技, 2018, 31(1): 29-33.
Jin Aijuan, Zheng Tianxiang, et al. Design and simulation of speed regulator based on adaptive fuzzy PID control [J]. Electronic Science and Technology, 2018, 31(1): 29-33.
[21]聶海強. 溫室環境控制方法研究[J]. 電子世界, 2013(22): 107-109.
Nie Haiqiang. Research of greenhouse environment control methods [J]. Electronics World, 2013(22): 107-109.