一種車載終端的主電源系統設計及控制方法
2025-02-05 00:00:00文志輝
物聯網技術 2025年3期

摘 要:為了滿足智能設備在車載復雜供電環境中穩定運行的需求,介紹了一種車載智能設備主電源系統的電路設計方案和控制方法,主要包括電源保護、超級電容充放電、備用電池充放電以及與主電源通路的自動切換,并介紹了MCU程序控制方法和完整的程序控制流程,以實現ISO 7637、ISO 16750和GB/T 19056、JTT 794等國際、國內標準對車載設備運行的要求。最后,給出了相關條件下的實際測試結果,表明該方案實施方便、操作可靠、邏輯結構清晰,驗證了該方案的可行性和實用性。
關鍵詞:車載終端;主電源系統;電路設計;超級電容;備用電池;車載記錄儀
中圖分類號:TP39;TN919.5 文獻標識碼:A 文章編號:2095-1302(2025)03-0-06
0 引 言
隨著公路運輸行業的快速發展,以及國家對載客汽車、危險品運輸車輛、重型載貨汽車、長途客運車、物流車的監管要求不斷提高,集防疲勞、防碰撞、視頻監控功能及衛星定位系統于一體的車載智能終端的應用越來越廣。考慮到車載系統的供電狀況復雜,電磁環境較為惡劣,為了確保汽車電子系統的可靠性和安全性,車載智能終端需要滿足ISO 7637、ISO 16750、GB/T 19056、JTT 794標準以及其他地方標準的要求[1-3],除了工作電壓范圍、防反接、過壓保護等常規要求外,測試脈沖、拋負載以及車載主電源關機后備用電池工作時長的標準要求,在車載智能終端主電源系統的電路設計和控制策略上也需要著重考慮。
1 車載設備的電源相關標準要求
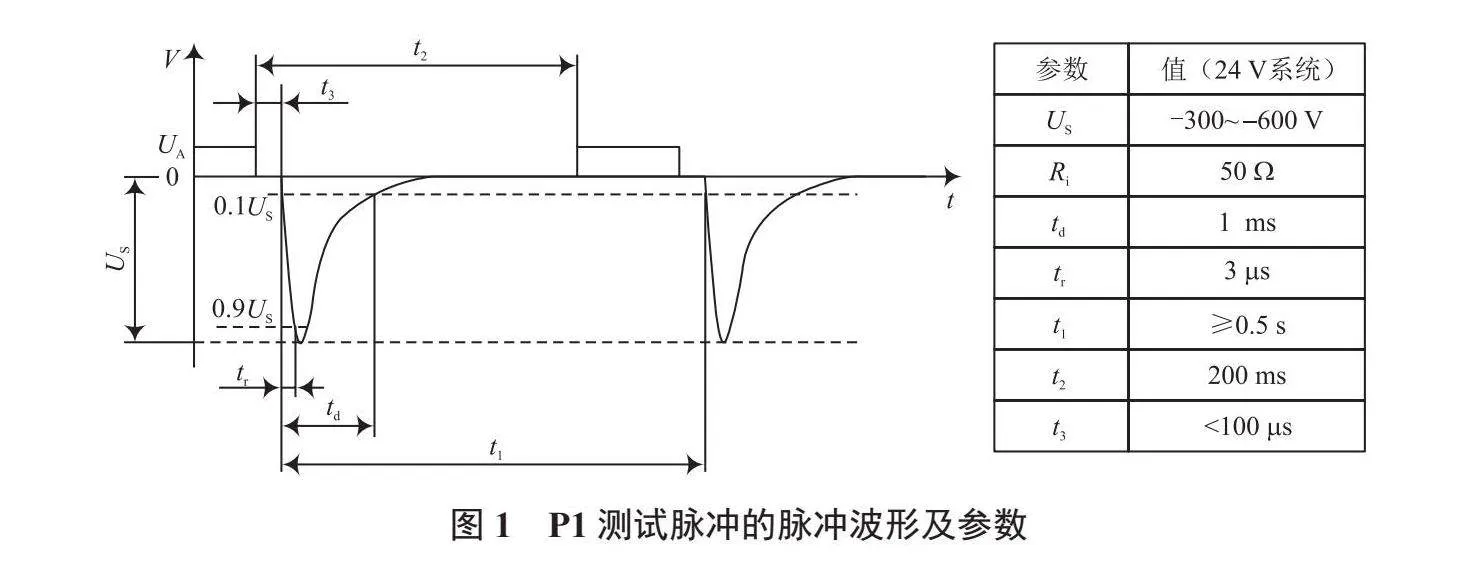
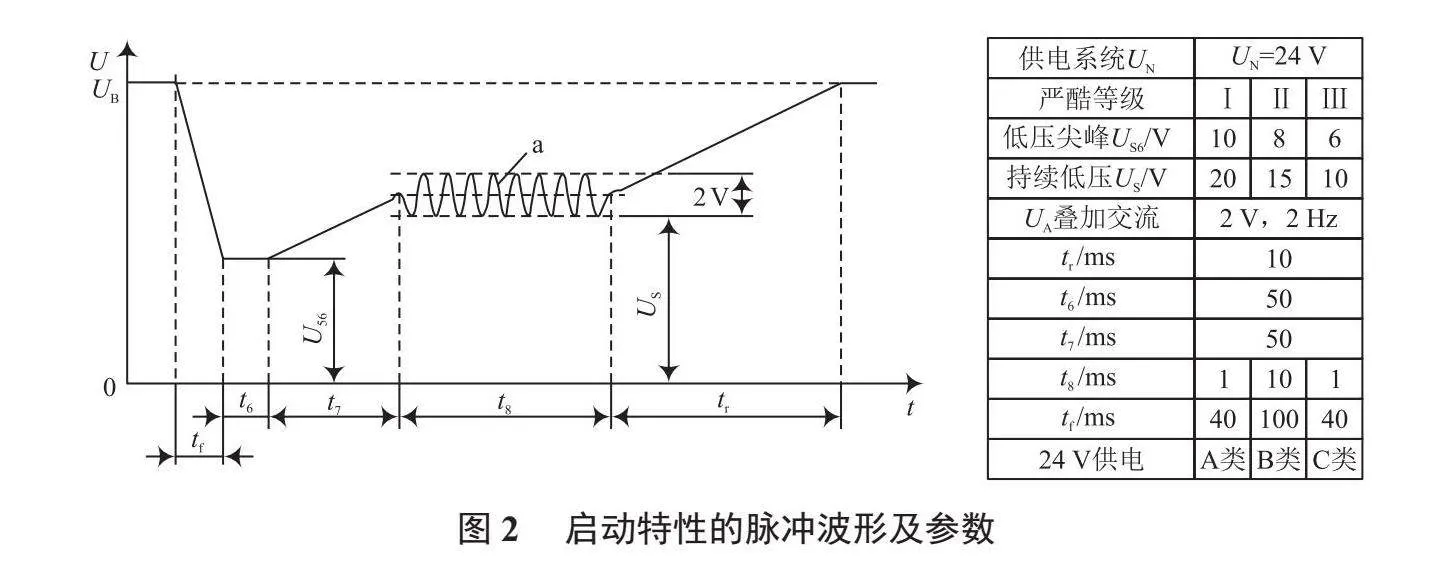
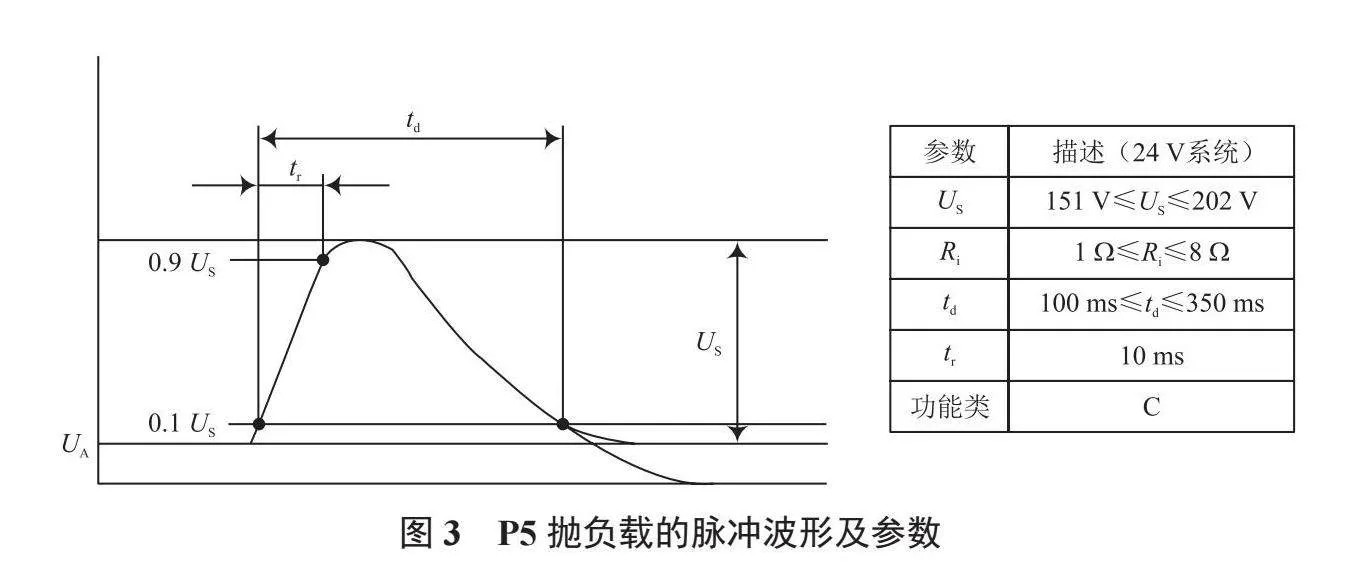
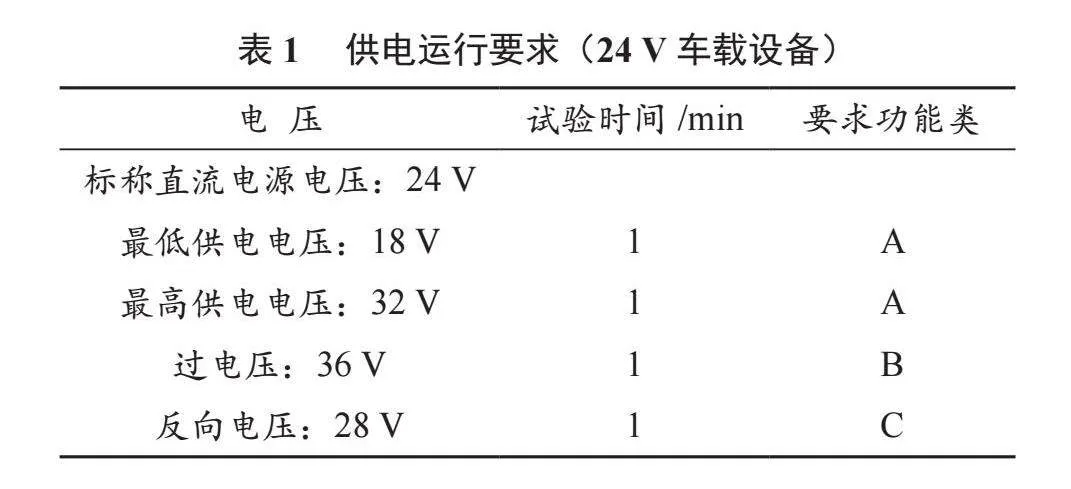
ISO 7637-2 標準用于研究機動車輛通過傳導和耦合方式引起的電氣干擾,并提出了沿電源線的電瞬態傳導及測試方法[1]。此標準共包括5種電源測試波形(P1~P5),其中脈沖波形P4已被移入ISO 16750-2 電氣負荷標準中(作為啟動特性標準)[2],此變動不影響本文的討論。測試脈沖P1用于模擬電源與感性負載斷開瞬間,與感性負載保持直接并聯供電的被測設備上所產生的較大幅度的負脈沖干擾情況。脈沖P2包括兩個子類型P2a和P2b,其中P2a是與被測試設備相并聯設備的運行電流被瞬間切斷時,由于連接線束電感的作用所產生的瞬變脈沖;脈沖P2b則模擬了在點火開關斷開時,直流電機作為發電機對其并聯的被測試設備產生的浪涌干擾。脈沖P3a和P3b屬于高速、低能量的脈沖群,是模擬開關過程中因線束的分布電感和電容影響而引起的瞬時脈沖,易引起數字開關電路的誤動作。脈沖波形P4(啟動特性)是由于車輛發動機的起動電路接通而導致的車輛電源系統電壓跌落現象。脈沖P5(拋負載)發生在交流發電機正在對蓄電池充電且蓄電池被斷開的瞬間,還連接在發電機電路上的其他負載會承受很高的浪涌電壓。P5a屬于破壞性極高的脈沖,其測試脈沖的幅度較高(200 V,甚至更高)、內阻較低(根據發電機的類型而定)、沖擊時間長(寬度最大350 ms),需采用專門的防浪涌器件進行防護。P5b脈沖對電子設備的沖擊相對較小,因為發電機內置了專門的鉗位二極管對最高電壓進行限制。ISO 16750-2標準對拋負載的要求是連續做10次,間隔1 min,設備在實驗后可正常工作。GB/T 19056和JTT 794標準中規定了車載設備的電源過電壓、防反接及主電源掉電后車載終端的工作時長要求。本文以24 V車載設備為例,主要介紹以上各標準相關的防反接、過電壓保護、欠壓保護、P5a拋負載、脈沖波形P1、啟動特性相關的電路設計及控制方法,這些方法對P2和P3波形同樣起作用[4]。圖1~圖3和表1是相關的防護或運行要求。其中的功能標準描述如下:A類,對設備施加干擾期間及之后,設備所有功能可正常運行;B類,對設備施加干擾期間,設備所有功能可正常運行,一項或幾項指標可允許超出規定的偏差,干擾停止之后,所有功能可自動恢復到正常工作狀態;C類,對設備施加干擾期間,設備的一項或多項功能不能執行,但干擾停止后所有功能需要自動恢復到正常工作狀態。
2 電源系統電路設計
2.1 電源系統電路
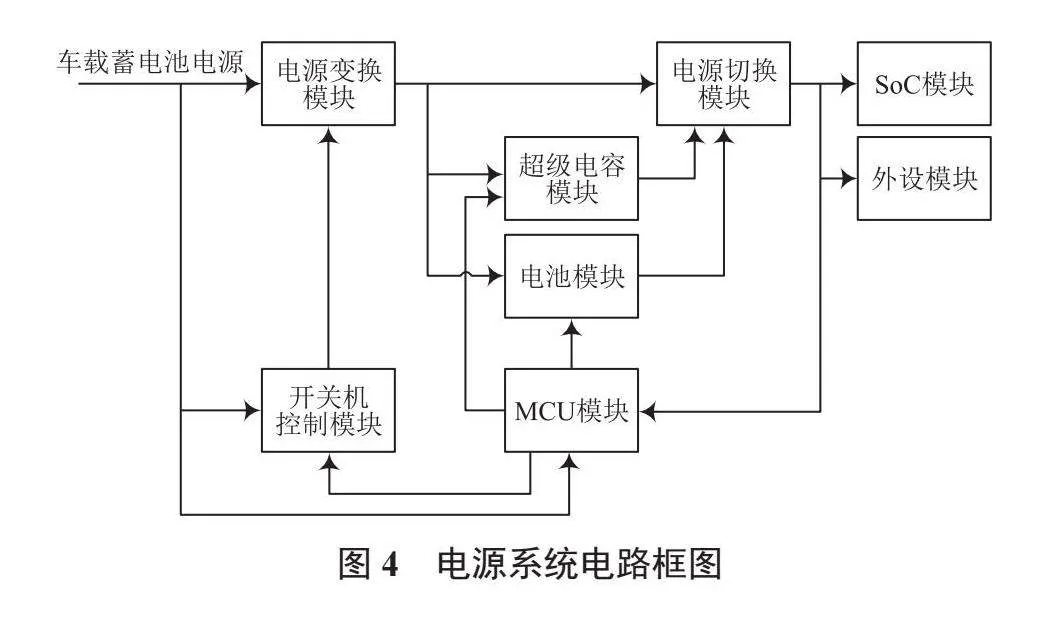
車載終端設備與車載蓄電池之間的供電連接包括正極DC+、負極DC-、控制ACC信號,蓄電池電源經過前端的防浪涌、防反接及過壓保護電路供給到主電源變換模塊。對于同時滿足12 V及24 V車輛應用的設備,此電源模塊為升降壓模塊,終端設備可支持9~36 V的輸入范圍;如果只用于24 V車輛,此模塊也可為降壓模塊。主電源變換模塊由開關機控制模塊進行控制(第一次上電時根據ACC信號進行控制啟動,啟動后由MCU進行控制),升降壓模塊的輸出為12.5 V,此12.5 V電壓再由MCU控制進行超級電容和備用電池的充電,以及給SoC模塊和其他外設模塊供電。當蓄電池電壓因第1章中所述的干擾發生波動或斷電時,由超級電容或備用電池給SoC模塊和外設模塊供電,以滿足設備抗干擾及標準所規定的延時關機要求。電源系統框圖如圖4所示。
2.2 電源輸入前端防護電路
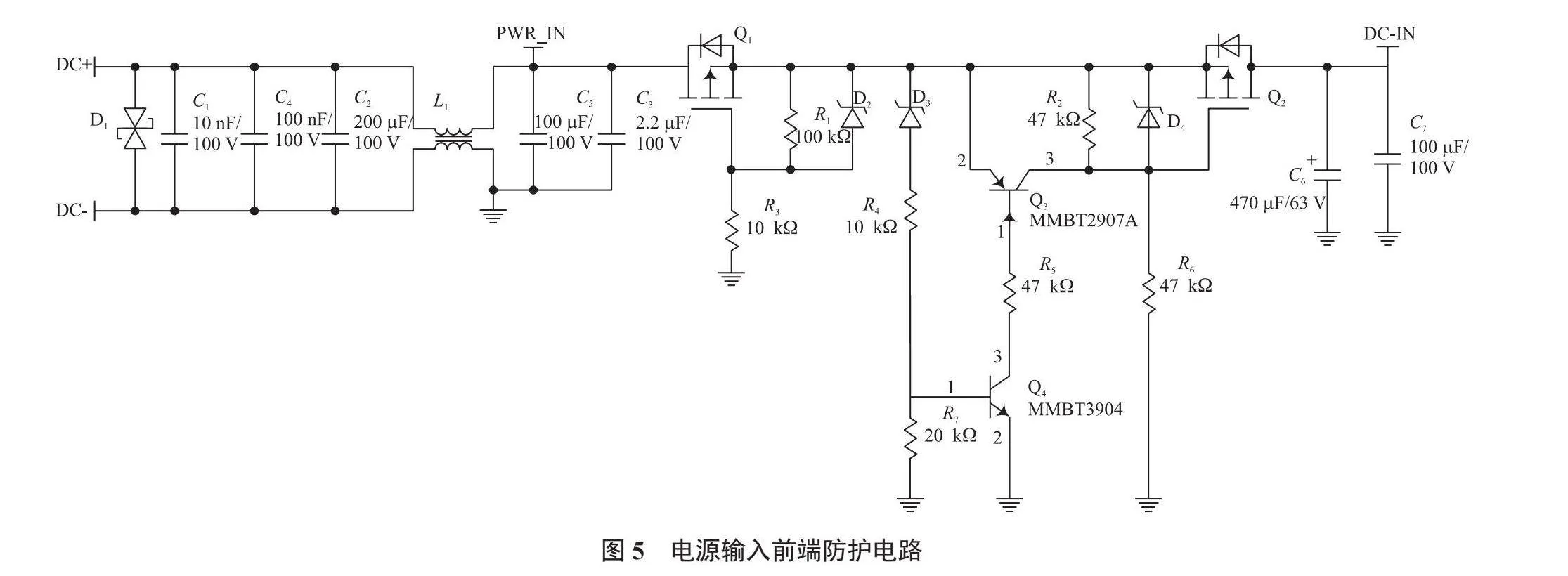
主電源變換模塊的前端輸入防護電路主要功能包括浪涌防護(拋負載P5a)、電源濾波、防反接防護、過電壓保護功能及過流防護功能。對于對流防護,主要采用保險絲,基于實際使用場景現場考慮更換,保險絲一般不安裝在設備內而是串聯在電源線上。電源輸入前端防護電路如圖5所示。
圖5中,大功率TVS管D1用于防浪涌[5-6],根據要求的防浪涌電壓等級、內阻和持續時間,采用不同功率等級的TVS管。根據表1中標準的要求,選擇TVS管的最大反向工作電壓36 V,相應的鉗位電壓為58 V左右[7-8]。另外,TVS管在浪涌發生時的實際能量需小于可承受最大能量。拋負載時TVS管的實際能量可按下面公式評估:
W=1/2×(Ippi)2×Rdt (1)
式中:Ippi =(Us-Vbr)/(Rd+R),Ippi為實際經過TVS管的最大電流;Us是拋負載最高電壓;Rd是二極管的反向導通電阻;R是拋負載發生器內阻;t是拋負載脈沖持續的最大時間(對于24 V系統是350 ms)。在本文介紹的電路中,選擇最大功率12 kW的TVS管,可滿足ISO 16750-2標準的要求。
圖5中采用共模電感L1對電源輸入進行濾波,以消除共模干擾的影響。共模電感的漏電感與其兩端的電容可構成防差模干擾的濾波電路,并且根據實測結果也可在電路中加入差模電感。功率MOS管Q1與R1、D2構成了防反接電路;功率MOS管Q2與D3、Q3、Q4、D4等共同構成防過壓電路,當輸入電源超過36 V時,Q2關掉以保護后端電路(滿足輸入電源過壓時的C級功能要求)。另外,前端電路中的電阻、電容耐壓值的設置也需要考慮保證長期運行的穩定性。
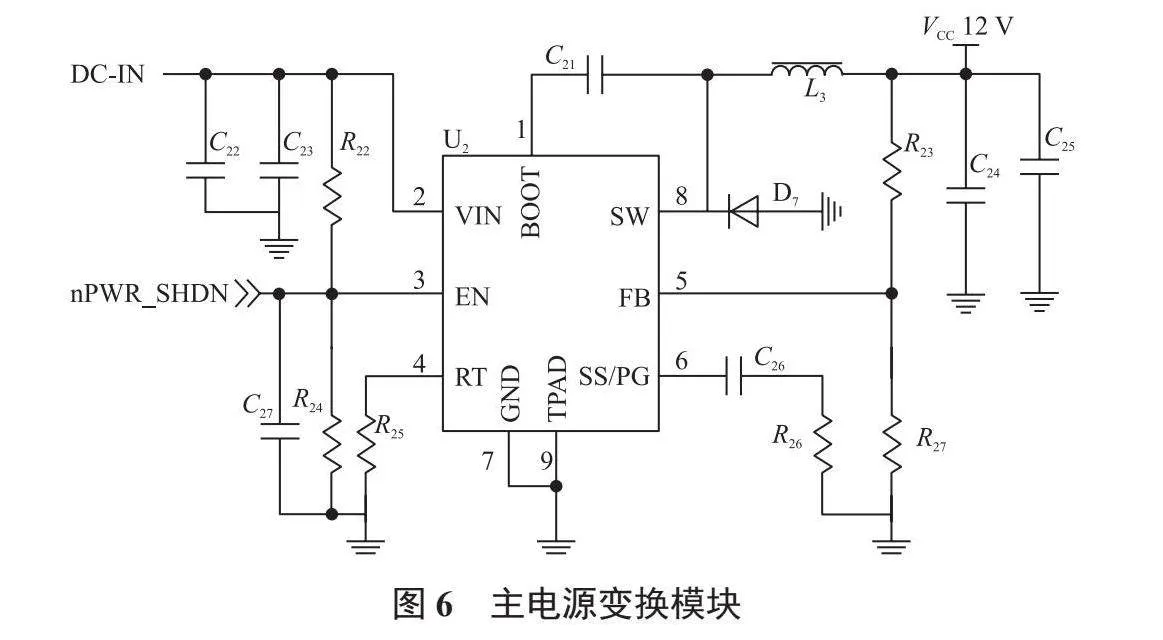
2.3 主電源變換模塊
主電源變換模塊如圖6所示,采用5 A輸出降壓轉換器,可以把蓄電池供給的24 V電壓轉換為VCC_12 V電壓。如果用于12 V和24 V車載系統,可使用升降壓變換器來實現同樣的功能,原理相似。當車載ACC信號初次變高且電源芯片EN腳的電壓超過使能閾值時,電源轉換芯片開始工作,否則保持在關閉狀態,實現欠壓保護功能。主電源變換模塊的輸出電壓經后級單獨的電源變換電路給MCU供電,MCU啟動后通過nPWR_SHDN網絡把主電源變換芯片的使能信號拉高,這樣可以使ACC信號即使出現短暫拉低,主電源變換模塊也能一直保持在工作狀態,構成閉鎖功能以滿足ACC啟動要求。
2.4 超級電容模塊
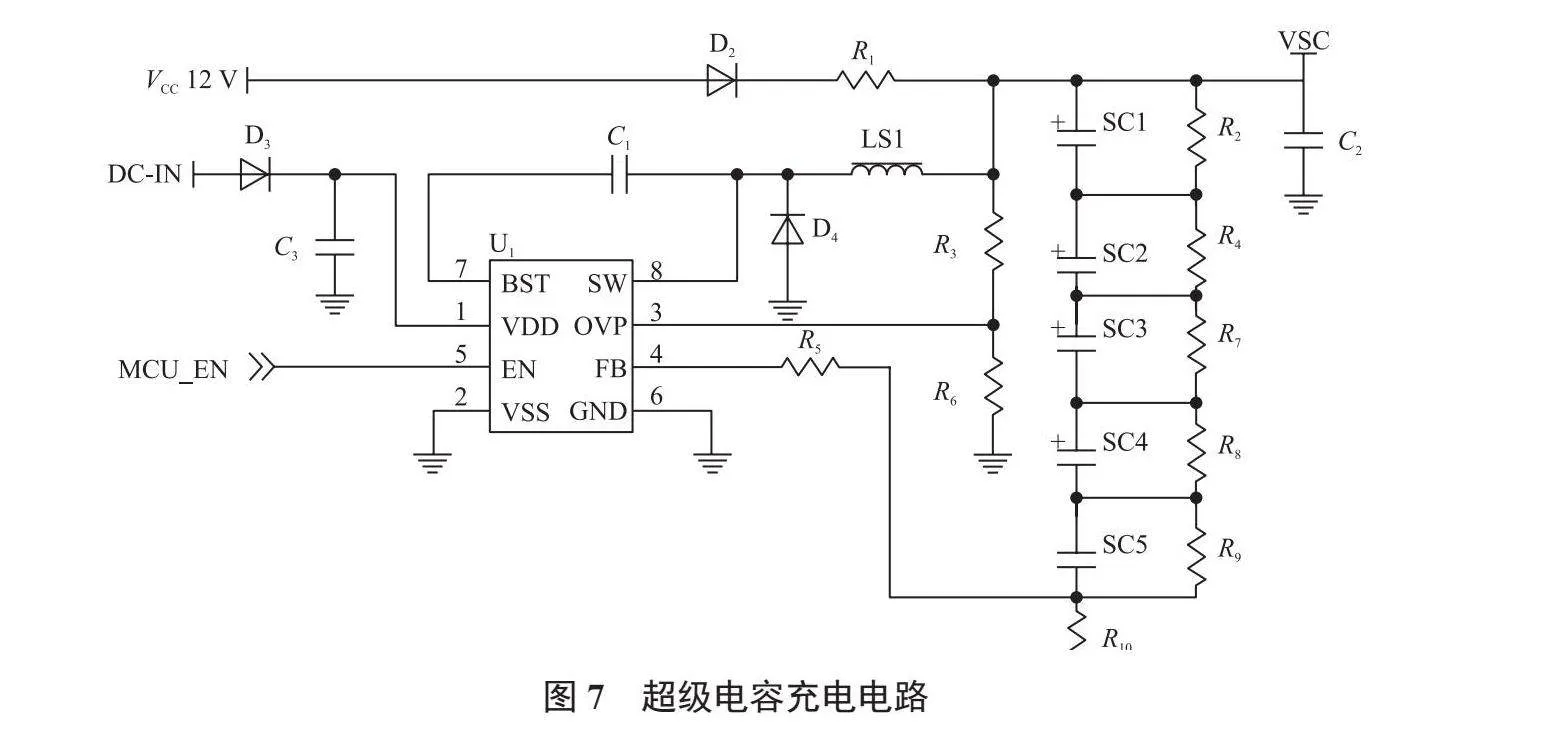
超級電容充電模塊由電阻充電電路、恒流快速充電電路、MCU控制電路構成。快速充電基于PWM方式的恒流轉換電路實現,可以通過恒流芯片的外部設定電阻設置充電電壓限值和恒流充電電流。為安全起見,設定快速充電電路的輸出電壓限值Vf略小于12 V(超級電容最終的充電電壓)[9-10];快速充電電路由MCU進行控制。MCU首先檢測輸入電壓,當DC-IN上電且電壓大于某一定值并持續一段時間Tr后,MCU會使能快速充電電路給超級電容充電,MCU同步檢測超級電容電壓,當超級電容電壓維持在Vf一定時間后,MCU關斷快速充電電路,由電阻充電電路完成超級電容的最終充電,并補償超級電容的自放電。當設備供電的DC-IN受到P1或P4干擾脈沖影響,導致輸入電壓瞬間下降,進而使主電源模塊的輸出電壓降低時,超級電容會通過電壓回饋電路給負載供電(同步供給MCU維持其工作);同時,MCU使能快速充電電路,以便在輸入電壓恢復時快速給超級電容充電。超級電容充電電路如圖7所示。
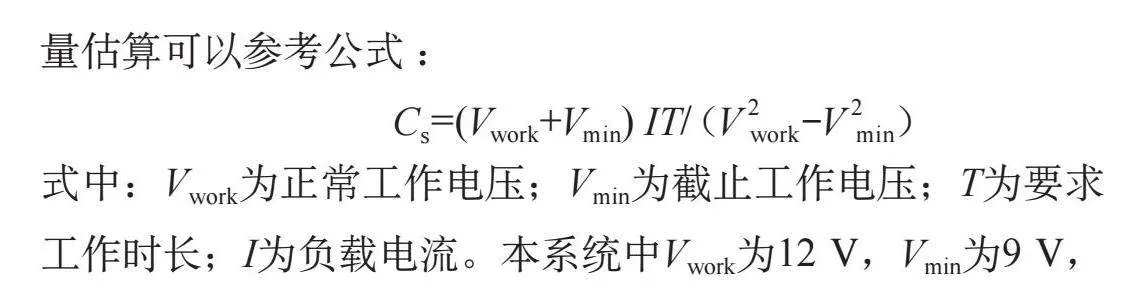
關于超級電容的選擇,需要綜合考慮設備工作電壓、脈沖P1和P4的干擾時長及重復次數、設備功耗[11-12],還要結合設備的掉電保護功能。本文介紹的車載設備,其滿載功耗為40 W,需要實現輸入主電源掉電后由超級電容供電時設備至少能工作2 s,以實現數據的存儲保護。超級電容的容量估算可以參考公式:
Cs=(Vwork+Vmin) IT/(V 2 work-V 2 min)
式中:Vwork為正常工作電壓;Vmin為截止工作電壓;T為要求工作時長;I為負載電流。本系統中Vwork為12 V,Vmin為9 V,I為3 A,T為2 s,由此可以得到超級電容容量為2 F。考慮到各單體超級電容的耐壓值及容量,選擇單體容量為10 F、耐壓值為2.7 V的超級電容,且5節串聯以實現所要求的規格。
2.5 備用電池
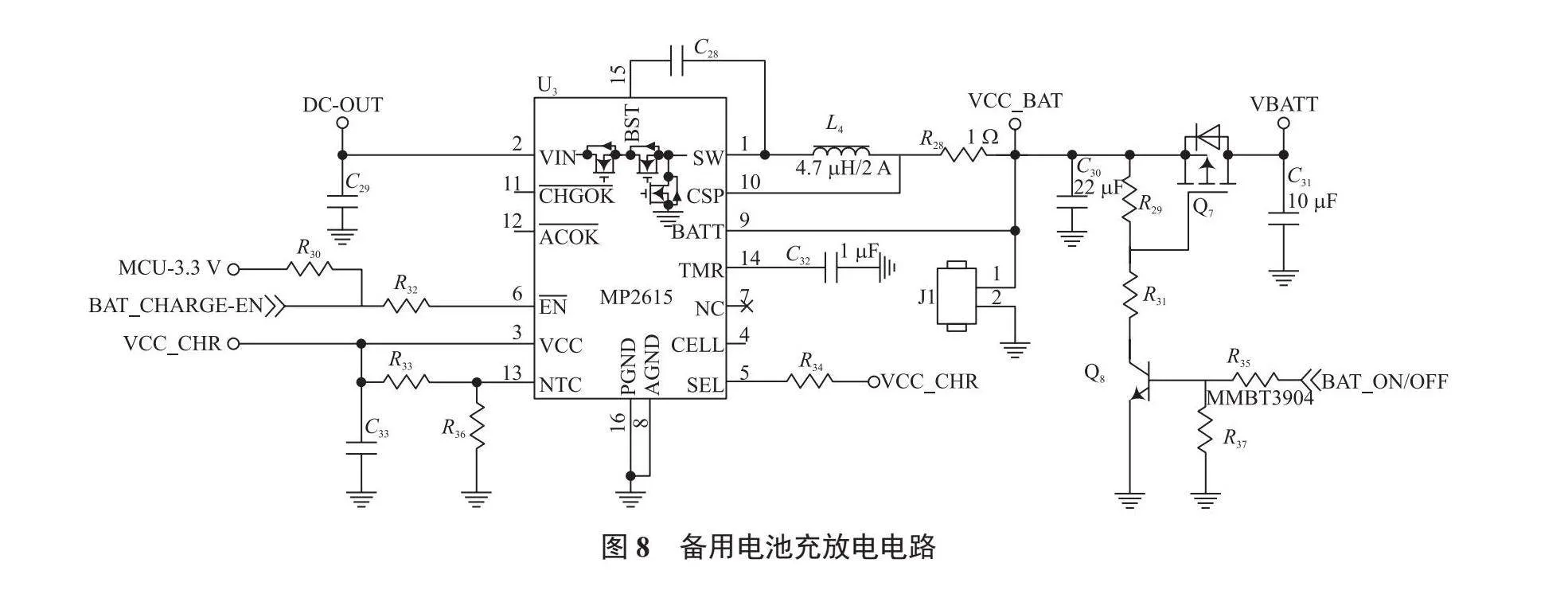
備用電池旨在滿足蓄電池輸入中斷后較長時間延時關機的需求。圖8展示了充放電電路,該電路專為兩節電池的充放電設計。充電控制器為MP2615,具備電池存在檢測、預充電、恒流和恒壓充電功能;充放電使能由MCU進行控制,避免過充并減少電池自放電,延長電池使用壽命。MCU還能根據一定時間內備用電池放電功能是否使用過,強制進行充放電操作,以確保電池功能正常。主電源變換模塊的輸出電壓、超級電容電壓、備用電池電壓各自經過一個肖特基二極管構成電源切換電路。該電路的輸出電壓VDD,在經過各自的獨立電源變換后,為SoC模塊和各種外設提供所需的電源電壓。
3 電源系統工作邏輯
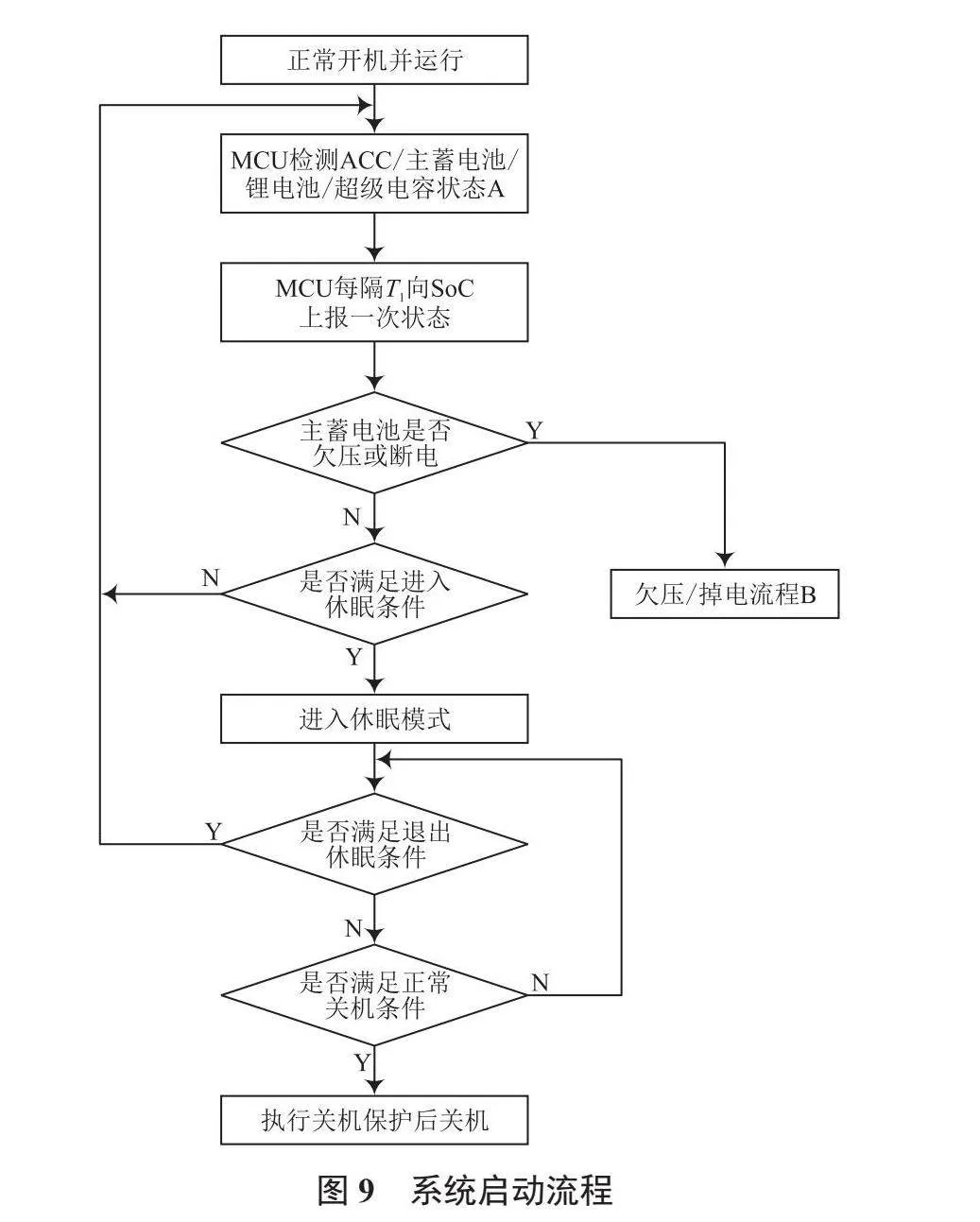
電源系統邏輯主流程如圖9所示。主電源模塊滿足初始上電條件,包括蓄電池輸入電壓在正常范圍,ACC信號變高且持續,環境溫度處于正常范圍,設備鎖已鎖,MCU上電且控制主電源模塊正常開機并運行。MCU持續檢測ACC的電平狀態、蓄電池輸入電源的狀態(正常供電、欠壓或斷電)、超級電容模塊的電壓狀態、備用電池的狀態(備用電池是否存在、電池電壓大小),并每隔一定時間T1上報給車載終端的主SoC。當車載蓄電池輸入低于主電源模塊的工作下限(蓄電池輸入電源處于欠壓或斷電狀態),主電源模塊停止工作,此時備用電池或超級電容模塊供電給SoC模塊或外設,設備進入欠壓或掉電流程。如果蓄電池輸入處于正常范圍,則MCU判斷是否滿足休眠條件,并執行進入和退出休眠;如果滿足正常關機條件,則執行關機。
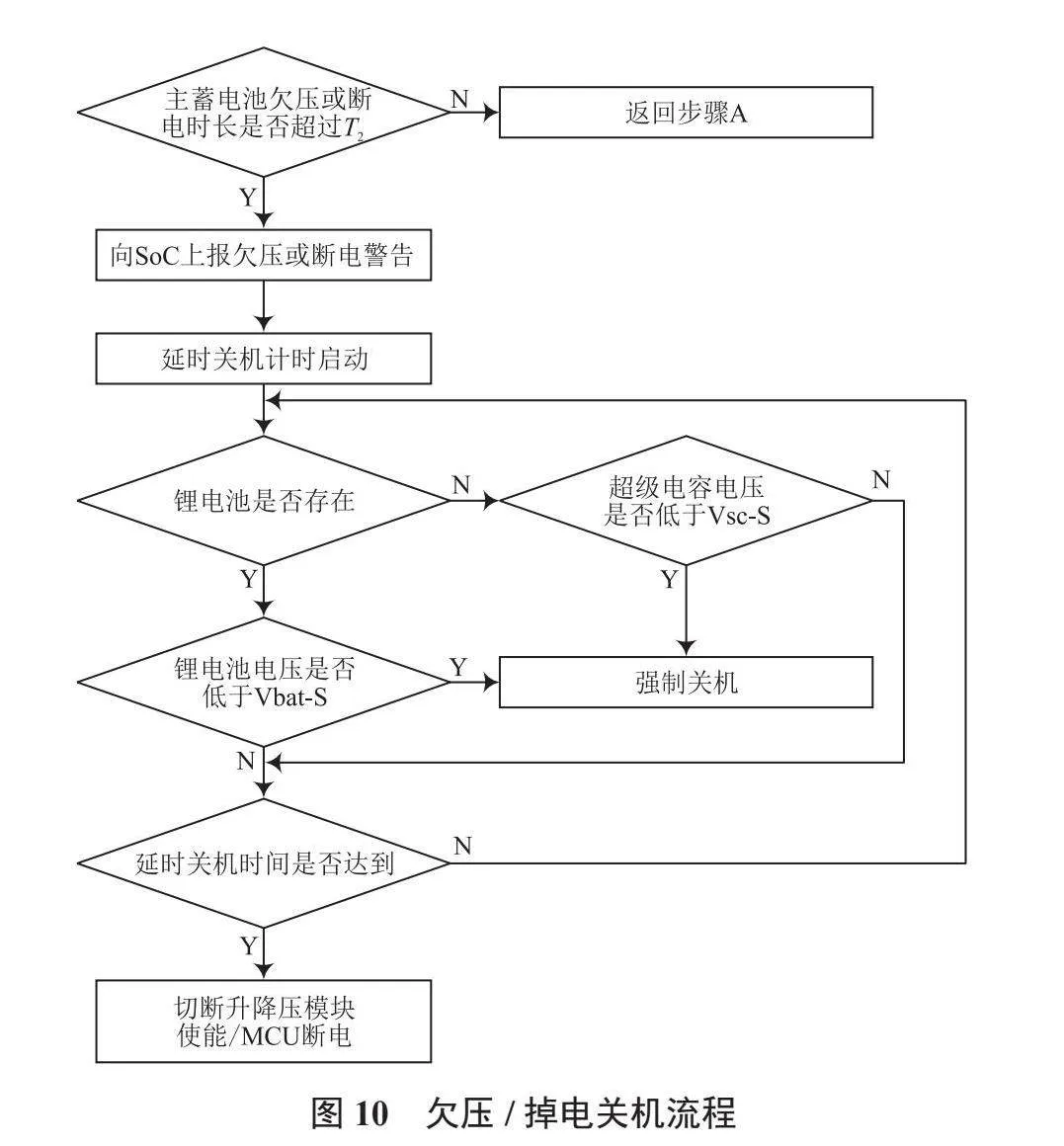
進入欠壓或掉電流程后,若蓄電池輸入欠壓或斷電狀態持續時間超過時間閾值T2,則生成欠壓或斷電告警信號并發送給SoC,進入延時關機狀態,如圖10所示。
ISO 7637標準下的P1負干擾脈沖持續寬度為200 ms,而ISO 16750-2標準下的擾動干擾脈沖寬度為10 s量級,時間閾值T2需要大于這些時間,并留出時間裕量ΔT。根據標準要求及設備的實際測試情況,ΔT為標準規定的由欠壓狀態恢復到正常可工作電壓的時間即可。蓄電池輸入處于欠壓或斷電狀態且時長小于T2時,電源切換模塊可根據超級電容模塊或電池模塊的電壓大小自動選擇給SoC模塊和外設模塊供電。當延時關機計時啟動后,若存在備用電池且電池電壓低于閾值Vbat-S,則車載終端強制關機;若備用電池電壓不低于Vbat-S,則MCU在達到延時關機時間后切斷主電源模塊的使能信號,并關閉SoC模塊和外設模塊的供電;若沒有備用電池,則MCU判斷超級電容模塊的電壓是否低于閾值Vsc-S,若低于此閾值,則車載終端強制關機;若超級電容模塊的電壓不低于閾值Vsc-S,則由超級電容模塊供電,并在達到延時關機時間后關閉主電源模塊,同時關掉SoC模塊和外設模塊供電。正常情況下,超級電容模塊的電壓大于備用電池的電壓。對于車載設備而言,更常遭遇的是由瞬間干擾引起的終端輸入電源欠壓或斷電情況(持續時間通常在秒級左右)。此時,由超級電容模塊給后端電路供電,而備用電池則不放電,充分發揮超級電容的可快速充放電、充放電次數遠大于鋰電池模塊的優勢[6-7]。只有在終端輸入電源處于欠壓或斷電的時長大于超級電容模塊放電持續的時間時,備用電池模塊才進行放電補償。
4 調測驗證
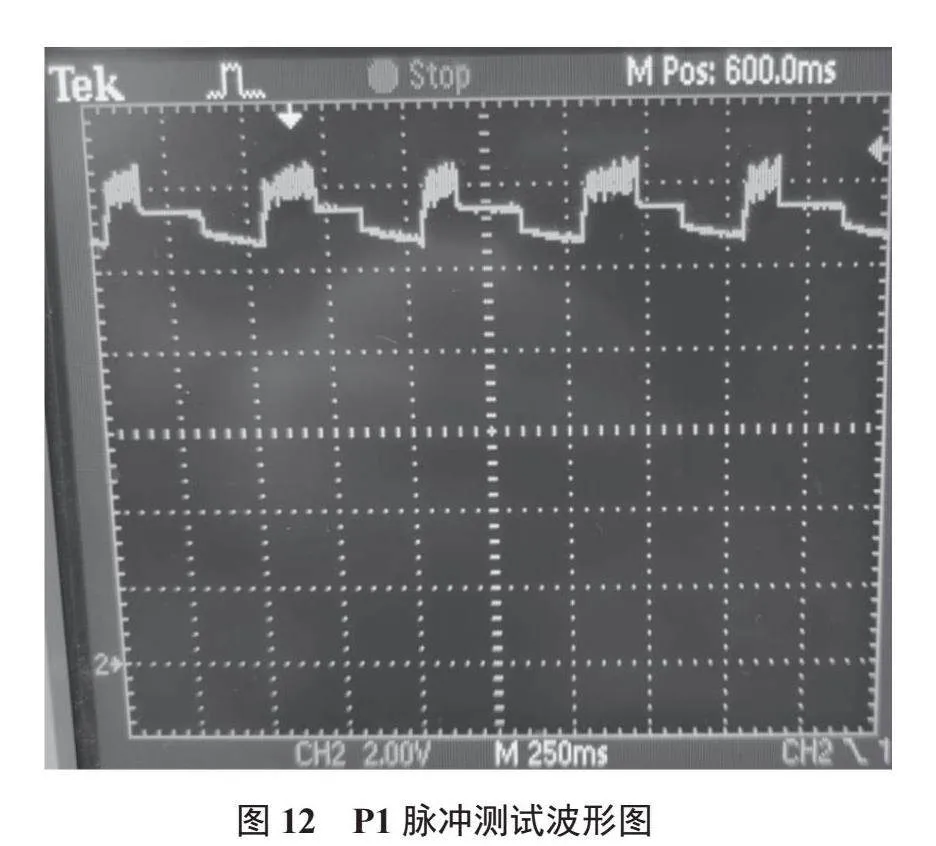
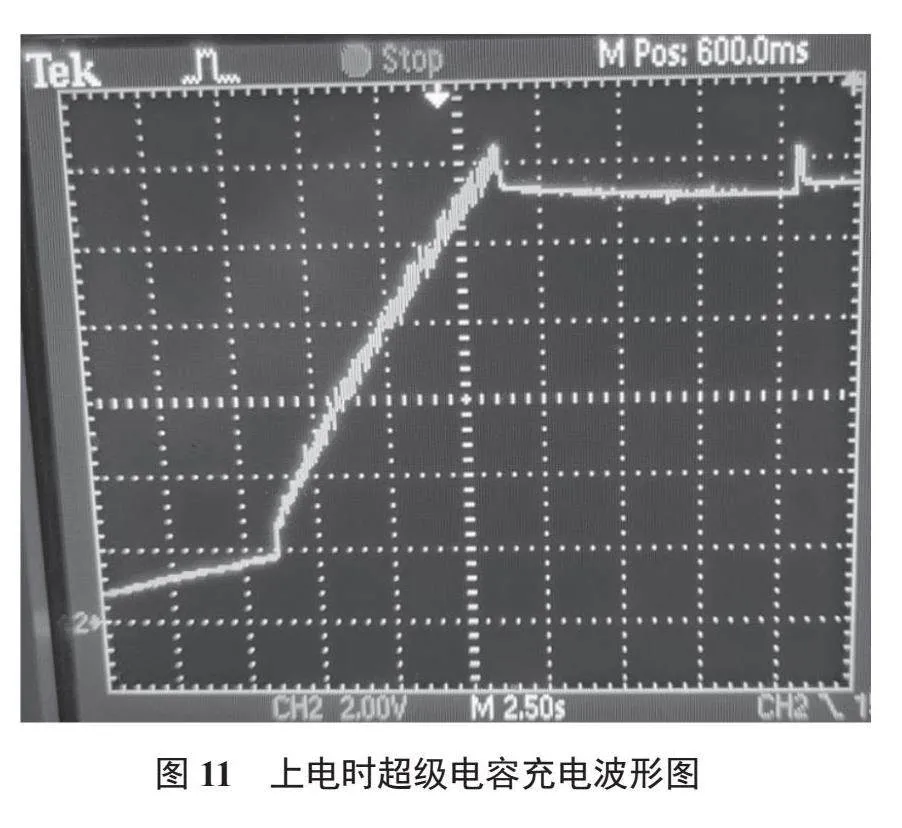
基于此電路方案和控制方法的車載設備在上電時的超級電容充電波形、滿負載時施加P1和P4以及拋負載時的測試波形圖分別如圖11~圖14所示。從圖11中可以看出,當車載設備上電,最初只有主電源變換器的輸出電壓經電阻給超級電容充電,且充電速度很慢。當恒流充電器開啟后,超級電容電壓會快速上升,達到一定值后恒流充電器就會關閉,再由主電源變換器輸出經過電阻繼續為超級電容充電。若超級電容的電壓低于快速充電的閾值,恒流充電器可能會多次重新啟動以進行補充充電。在進行P1測試時超級電容會在200 ms內放電,接著在300 ms內進行充電。
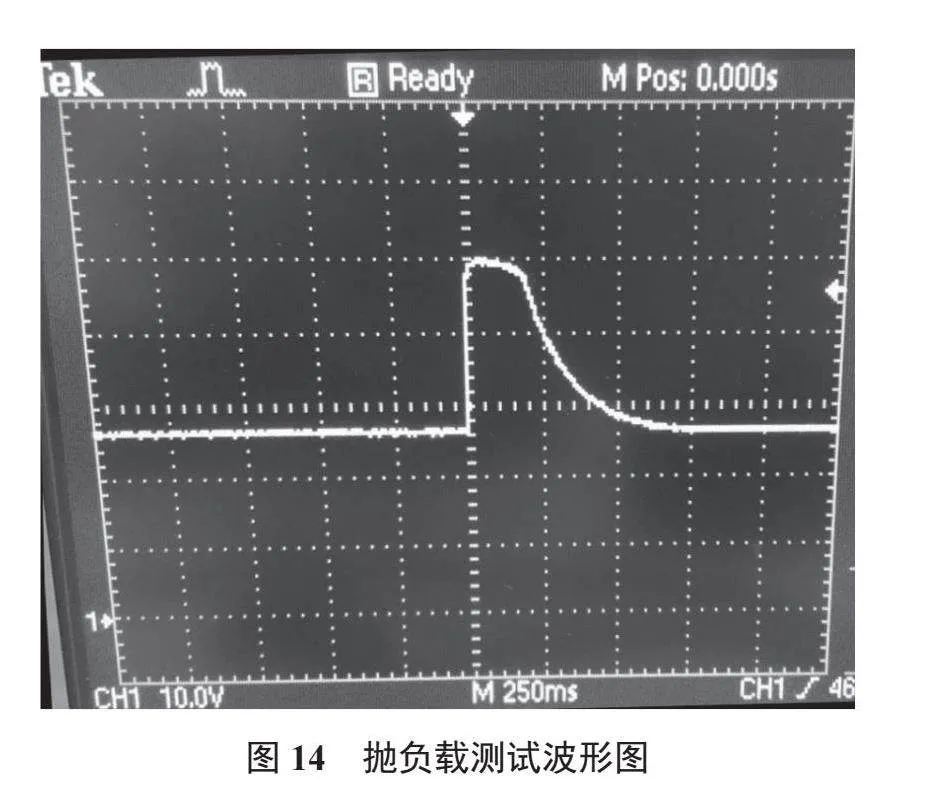
對于P4脈沖(等級II),在tf、t6、t7時間段內,超級電容處于放電狀態,以維持設備的運行功能,在此期間,如果超級電容電壓低于快速充電閾值,恒流充電器會啟動,使電容電壓上升。在進行拋負載測試時,前置的TVS管會將浪涌電壓鉗位在51 V(與Bulk電容共同作用實現),此時過壓保護電路會觸發動作,導致MOS管Q2關斷,以保護后端電路不受損害。
5 結 語
本文設計了一種車載智能終端的主電源系統和控制方法,主要介紹了電源系統架構、硬件/軟件設計方案及實測結果。通過設備的ISO 7637和ISO 16750的實驗測試證明,該系統方案性能穩定、實現方法簡單可靠、價格適中,滿足現行標準的要求和實際使用需求,可應用于使用環境惡劣的車載領域,有效應對各種干擾的影響,具備良好的應用價值。
參考文獻
[1] ISO. Road vehicles—electrical disturbances from conduction and coupling—Part2:electrical transient conduction along supply lines only: ISO 7637-2 [S].[S.l.]: [s.n.], 2008.
[2] ISO. Road vehicles—environmental conditions and testing for electrical equipment—Part2: electrical roads: ISO 16750-2 [S]. [S.l.]:[s.n.], 2012.
[3] 江蘇省交通運輸廳運輸管理局.道路運輸車輛主動安全智能防控系統技術規范:DB32T 3610.1—2019 [S]. [出版地不詳]:[出版者不詳] ,2017.
[4] 楊英振,趙光亮,史家濤,等.基于ISO7637-2傳導抗擾度測試解析[J].內燃機與配件,2022(3):41-44.
[5] 洪炳林.車載監控終端電源的浪涌抑制電路設計[J]. 無線互聯科技,2017(19):76-77.
[6] 于正同,時培燕,孫旭升,等.電控柴油發動機控制器拋負載防護電路設計[J].現代車用動力,2021(2):8-10.
[7] 孫德生. 道路運輸大型車輛新型行車安全系統設計[J].電子產品世界,2021,28(6):40-43.
[8] 張亞聰,管繼富,張天一,等.車載控制器浪涌抑制技術研究[J].計算機測量與控制,2017,25(1):141-143.
[9] 丁石谷,蔡榮海,張鵬.車載超級電容器組多工況動態特性仿真分析[J].電氣傳動,2021,51(21):66-71.
[10] 曹廣華,高佶,高潔,等.超級電容的原理及應用[J].自動化技術與應用,2016,35(5):131-135.
[11] 王梓齊,嚴利民.一種超級電容電壓均衡策略[J].工業控制計算機,2022,35(11):131-133.
[12] 宋倩,藍俊歡.串聯超級電容器組的均壓方法研究[J].電子設計工程,2022,30(20):166-170.
