基于TC264芯片及WiFi模塊控制的倉(cāng)庫(kù)自動(dòng)搬運(yùn)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
2025-02-05 00:00:00周永康李歡劉國(guó)建李春華
物聯(lián)網(wǎng)技術(shù) 2025年3期


摘 要:文中詳細(xì)地說(shuō)明了智能小車的控制原理,介紹了智能小車的創(chuàng)新點(diǎn)和應(yīng)用價(jià)值。所設(shè)計(jì)的智能倉(cāng)庫(kù)自動(dòng)搬運(yùn)系統(tǒng)通過(guò)路由器接入云平臺(tái),實(shí)現(xiàn)近端電腦或手機(jī)客戶端對(duì)系統(tǒng)的遠(yuǎn)程控制和監(jiān)控。平臺(tái)發(fā)送小車巡航路線數(shù)據(jù)到遠(yuǎn)端的WiFi芯片中,再通過(guò)串口發(fā)送給小車上的MCU控制芯片,控制小車的運(yùn)動(dòng)路徑。系統(tǒng)配備反饋系統(tǒng),遇到障礙物時(shí)可自動(dòng)重新規(guī)劃路線。通過(guò)集成智能控制和自主規(guī)劃算法,該系統(tǒng)能夠高效、準(zhǔn)確地完成搬運(yùn)任務(wù),提高了倉(cāng)庫(kù)操作的智能化程度。
關(guān)鍵詞:TC264芯片;智能小車;WiFi;云控制;藍(lán)牙定位;嵌入式系統(tǒng)
中圖分類號(hào):TP332.3 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2095-1302(2025)03-0-03
0 引 言
隨著電商和物流行業(yè)的迅速發(fā)展,物流運(yùn)營(yíng)成為企業(yè)競(jìng)爭(zhēng)的重要組成部分,而倉(cāng)儲(chǔ)物流作為整個(gè)物流運(yùn)營(yíng)中的重要環(huán)節(jié),對(duì)物流效率和成本控制有著至關(guān)重要的影響。然而,傳統(tǒng)的人工搬運(yùn)操作存在人力投入大、效率低、易出錯(cuò)等問(wèn)題,不能滿足現(xiàn)代物流運(yùn)營(yíng)的需求。
自動(dòng)化搬運(yùn)技術(shù)可以提高效率、降低成本,同時(shí)還能夠提高工作環(huán)境的安全性和可靠性。因此,自動(dòng)化搬運(yùn)技術(shù)在倉(cāng)庫(kù)物流行業(yè)中將得到越來(lái)越多的應(yīng)用。為此,本文將云平臺(tái)、WiFi通信、藍(lán)牙定位等專業(yè)技術(shù)相結(jié)合,設(shè)計(jì)出更安全、便捷、更適用于倉(cāng)庫(kù)貨物搬運(yùn)的智能車系統(tǒng)。
1 控制系統(tǒng)原理構(gòu)成
1.1 系統(tǒng)主控芯片選擇
本文使用英飛凌半導(dǎo)體公司推出的一款高性能的嵌入式微控制器芯片TC264作為MCU[1]。該器件采用了TriCore?架構(gòu),融合了32位的RISC、DSP和特定的協(xié)處理器單元。這種架構(gòu)使得TC264能夠同時(shí)處理實(shí)時(shí)控制任務(wù)和復(fù)雜的信號(hào)處理任務(wù),能靈活控制各個(gè)模塊進(jìn)行協(xié)作,實(shí)現(xiàn)相應(yīng)的功能及設(shè)計(jì)要求。
1.2 WiFi模塊選擇
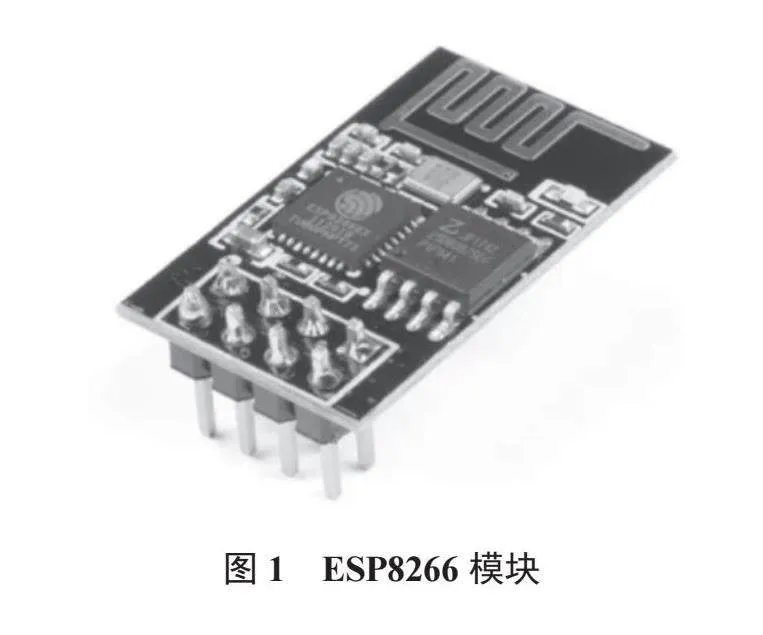
WiFi模塊選擇了Espressif Systems推出的低成本、高性能的ESP8266,如圖1所示,它集成了802.11 b/g/n WiFi功能,可以用于遠(yuǎn)程控制和監(jiān)控應(yīng)用[2],例如遠(yuǎn)程傳感器數(shù)據(jù)采集、遠(yuǎn)程設(shè)備控制等;同時(shí)可作為便捷的無(wú)線通信解決方案,適用于物聯(lián)網(wǎng)應(yīng)用和無(wú)線連接的項(xiàng)目,如智能家居系統(tǒng)、傳感器節(jié)點(diǎn)等,可以很好地實(shí)現(xiàn)本項(xiàng)目中連接云平臺(tái)的功能。
1.3 定位模塊選擇
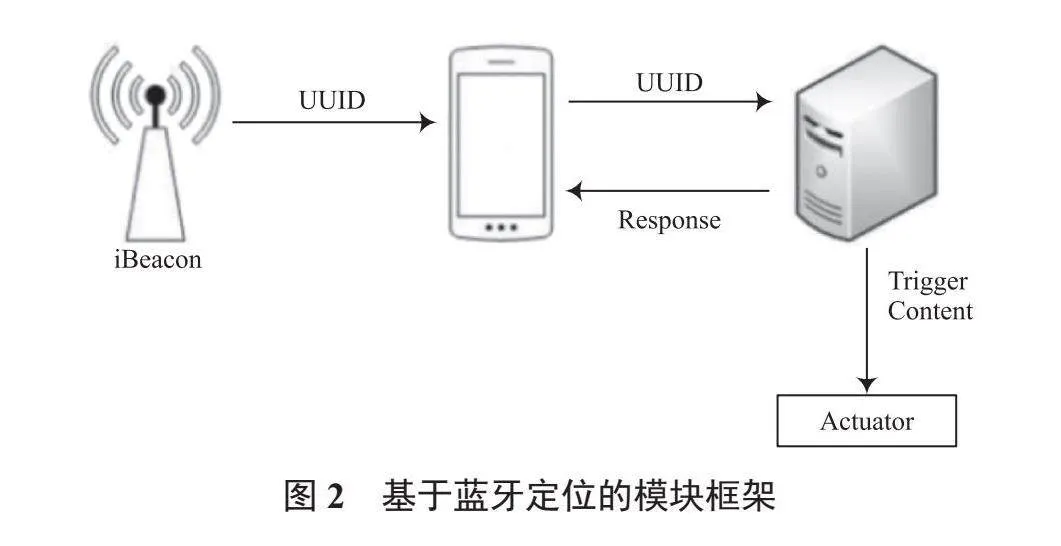
從實(shí)際需求及成本等角度考慮,選用藍(lán)牙Beacon信標(biāo)[3]進(jìn)行定位。相較于對(duì)基礎(chǔ)設(shè)施有較高要求的UWB(超寬帶)[4]、有源RFID[5]以及WiFi技術(shù),藍(lán)牙無(wú)線通信技術(shù)的成本優(yōu)勢(shì)較突出。藍(lán)牙Beacon信標(biāo)是一種利用藍(lán)牙低功耗技術(shù)進(jìn)行定位和位置感知的無(wú)線設(shè)備,它通過(guò)定期廣播包含唯一標(biāo)識(shí)符(UUID、Major、Minor)的信號(hào),在零售、導(dǎo)航、物聯(lián)網(wǎng)等領(lǐng)域得到廣泛應(yīng)用。在選擇Beacon時(shí),本文綜合考慮了功耗、傳輸范圍、協(xié)議支持等因素,最終選擇了EFR32BG22A3模塊作為總的藍(lán)牙接收端,它支持藍(lán)牙5.4串口透?jìng)鞴δ埽邆漭^高的接收靈敏度(最高-96.2 dBm)和理論上較遠(yuǎn)的通信距離(最遠(yuǎn)105 m),能夠很好地滿足本系統(tǒng)的需求。功能原理如圖2所示。
1.4 麥克納姆輪原理
麥克納姆輪[6-8](也稱為“麥克納姆全向輪”)是一種可實(shí)現(xiàn)全方位移動(dòng)的輪子設(shè)計(jì)。它由輪轂和圍繞輪轂的輥?zhàn)咏M成,這些輥?zhàn)拥妮S線與輪轂軸線夾角為45°。在輪轂的輪緣上斜向分布著許多小輥?zhàn)樱@些輥?zhàn)邮菦](méi)有動(dòng)力的小滾子,但它們的母線特殊。當(dāng)輪子繞著固定的輪心軸旋轉(zhuǎn)時(shí),各個(gè)小滾子的包絡(luò)線形成一個(gè)圓柱面,因此該輪能夠連續(xù)地向前滾動(dòng)。通過(guò)4個(gè)同樣輪子的組合,可以使機(jī)構(gòu)實(shí)現(xiàn)全方位移動(dòng)功能。根據(jù)夾角45°,麥克納姆輪可以分為互為鏡像關(guān)系的A輪和B輪。根據(jù)不同的組合方式,麥克納姆輪可以實(shí)現(xiàn)前進(jìn)、后退、旋轉(zhuǎn)、左移、右移等功能。例如,ABAB式的組合方式可以實(shí)現(xiàn)向前運(yùn)動(dòng)。
麥克納姆輪被廣泛應(yīng)用于機(jī)器人、自動(dòng)化設(shè)備、搬運(yùn)機(jī)械、AGV(自動(dòng)導(dǎo)引車)等領(lǐng)域,其使得這些設(shè)備能夠在狹小的空間內(nèi)自由移動(dòng),解除了轉(zhuǎn)彎半徑的限制。為了實(shí)現(xiàn)全向移動(dòng),需要精確控制每個(gè)麥克納姆輪的速度和方向。可以通常采用PID控制[9]或者更高級(jí)的控制算法來(lái)實(shí)現(xiàn)這一目標(biāo)。麥克納姆輪的設(shè)計(jì)使得機(jī)器人在平坦地面上表現(xiàn)良好。
2 系統(tǒng)原理及實(shí)現(xiàn)的功能
本系統(tǒng)主要由WiFi無(wú)線通信部分、藍(lán)牙定位導(dǎo)航部分、信息顯示部分、傳感器部分、CPU執(zhí)行部分和客戶端控制部分六大部分組成。
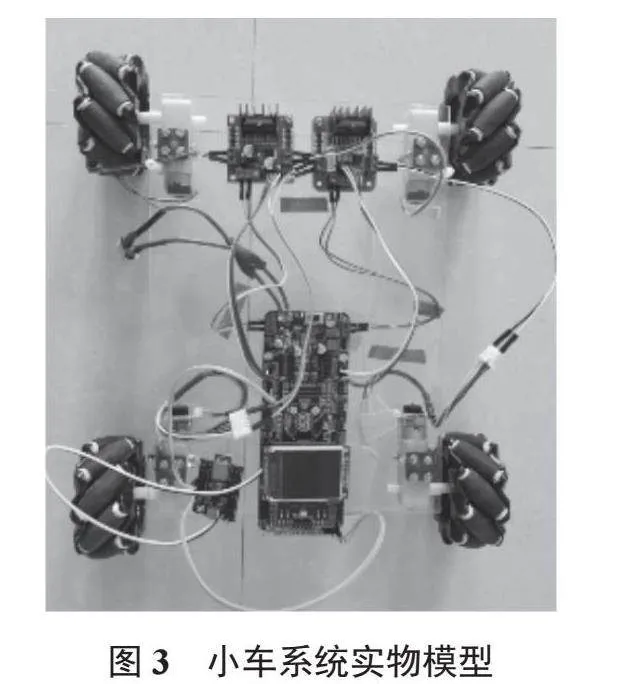
為驗(yàn)證結(jié)果,搭建了如圖3所示的實(shí)物系統(tǒng)底盤。該實(shí)物選用麥克納姆輪構(gòu)建的車模作為載體,搭建了主要的系統(tǒng)控制電路,完成了相關(guān)傳感器連接并構(gòu)建了大致的系統(tǒng)骨架,以便實(shí)現(xiàn)項(xiàng)目所需要的相關(guān)功能。
本系統(tǒng)使用TC264芯片作為主控MCU,用串口協(xié)議與WiFi芯片ESP8266通信,再由其通過(guò)路由器接入機(jī)智云平臺(tái)[10],構(gòu)成WiFi無(wú)線通信部分。用戶可通過(guò)系統(tǒng)上的按鍵進(jìn)行配網(wǎng)連接,在客戶端上選定目標(biāo)位置;然后平臺(tái)會(huì)將小車巡航路線數(shù)據(jù)發(fā)送到遠(yuǎn)端的WiFi芯片中,再通過(guò)串口發(fā)送給小車系統(tǒng)上搭載的TC264控制芯片,以控制電機(jī)驅(qū)動(dòng),進(jìn)而驅(qū)動(dòng)小車系統(tǒng)的四路直流電機(jī),實(shí)現(xiàn)小車的運(yùn)動(dòng)和轉(zhuǎn)向等功能。這樣,就能夠?qū)崿F(xiàn)客戶端對(duì)系統(tǒng)的遠(yuǎn)程控制和監(jiān)控。
2.1 藍(lán)牙定位導(dǎo)航部分
在室內(nèi)環(huán)境中,由于無(wú)線信號(hào)在傳播過(guò)程中受到衰減、反射、散射等影響,導(dǎo)致信號(hào)強(qiáng)度發(fā)生變化。因此,定位系統(tǒng)通過(guò)測(cè)量接收器接收到的信號(hào)強(qiáng)度來(lái)估計(jì)目標(biāo)物體的位置,采用的方法包括信號(hào)衰減模型或指紋庫(kù)匹配算法等。本系統(tǒng)采用簡(jiǎn)單的路徑損耗傳播模型[11]求得距離值,如式(1)所示:
RSS=-10nlog10d+A (1)
式中:RSS為模塊實(shí)時(shí)讀取到的RSSI值;n為路徑損耗指數(shù),其取值與物理環(huán)境有關(guān);A為EFR32BG22A3模塊與Beacon信標(biāo)參考距離位置處的RSSI值;d為實(shí)際求得的距離值。藍(lán)牙定位結(jié)果示意圖如圖4所示。
2.2 信息顯示部分
信息顯示由一塊TFT屏幕實(shí)現(xiàn),同時(shí)手機(jī)客戶端也可顯示相關(guān)信息,便于用戶隨時(shí)監(jiān)控系統(tǒng)狀態(tài)。傳感器部分主要包括超聲波模塊[12]和紅外模塊[13],用于檢測(cè)行進(jìn)路徑上的障礙物,并及時(shí)反饋以重新規(guī)劃路線。編碼器用于對(duì)系統(tǒng)的速度進(jìn)行調(diào)節(jié)和控制,實(shí)現(xiàn)靈活移動(dòng),并在到達(dá)目標(biāo)點(diǎn)時(shí)控制舵機(jī)模擬貨物放置;CPU執(zhí)行部分負(fù)責(zé)整個(gè)系統(tǒng)的資源調(diào)度和控制。
2.3 客戶端控制部分
通過(guò)調(diào)用機(jī)智云平臺(tái)的接口可快速生成滿足要求的APP。如圖5所示,APP可使用郵箱登錄,通過(guò)掃描云平臺(tái)系統(tǒng)的二維碼完成設(shè)備綁定,即可監(jiān)控小車系統(tǒng)的當(dāng)前狀態(tài);并選擇目標(biāo)點(diǎn)位以控制系統(tǒng)完成貨物搬運(yùn)。
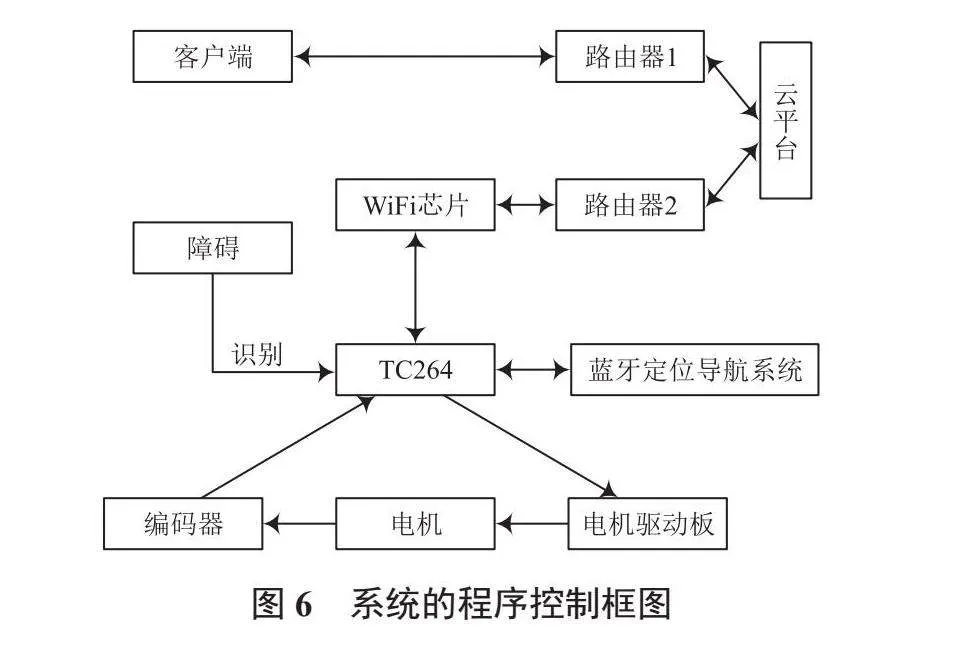
圖6為本系統(tǒng)的程序控制框圖。
以上就是對(duì)系統(tǒng)原理組成的詳細(xì)闡述。該智能小車的系統(tǒng)原理構(gòu)成較為簡(jiǎn)潔,在實(shí)際使用過(guò)程中還需要不斷修正和校對(duì),但在實(shí)驗(yàn)階段,通過(guò)客戶端用戶已基本實(shí)現(xiàn)了環(huán)境檢測(cè)和控制系統(tǒng)在室內(nèi)搬運(yùn)貨物的功能。
3 創(chuàng)新點(diǎn)和應(yīng)用價(jià)值
小車系統(tǒng)采用Beacon藍(lán)牙信標(biāo)定位導(dǎo)航的方式,實(shí)現(xiàn)了系統(tǒng)的定位功能。這一創(chuàng)新方法摒棄了市面上常見的地面鋪設(shè)電磁線尋跡方法,有效彌補(bǔ)了室內(nèi)GPS信號(hào)弱的缺陷,大大降低了室內(nèi)定位成本。
本文研究系統(tǒng)地解決了小車在運(yùn)輸過(guò)程中因環(huán)境變化而遇到的障礙問(wèn)題。通過(guò)多方位超聲波等傳感器實(shí)時(shí)感知,小車能夠迅速識(shí)別并繞開障礙物,對(duì)突發(fā)障礙也能及時(shí)做出響應(yīng),從而實(shí)現(xiàn)了運(yùn)輸過(guò)程的智能化升級(jí)。遇到障礙時(shí),客戶端會(huì)優(yōu)化處理,遠(yuǎn)程重新規(guī)劃路徑,實(shí)現(xiàn)自動(dòng)路徑規(guī)劃,使得小車的尋跡更加靈活且智能。此外,客戶端還能實(shí)時(shí)反饋小車的當(dāng)前狀態(tài)及相關(guān)信息。
為便于在倉(cāng)庫(kù)內(nèi)高效實(shí)現(xiàn)貨物搬運(yùn),采用麥克納姆輪技術(shù),成功解決了傳統(tǒng)搬運(yùn)設(shè)備掉頭、轉(zhuǎn)向不方便的問(wèn)題。此外,麥克納姆輪特有的水平移動(dòng)能力,使得設(shè)備能夠輕松避開障礙物,進(jìn)一步提升了操作的靈活性和效率。
4 結(jié) 語(yǔ)
本文介紹了一種基于TC264芯片及WiFi模塊控制的倉(cāng)庫(kù)自動(dòng)搬運(yùn)系統(tǒng)。該系統(tǒng)采用TC264芯片作為主控MCU,通過(guò)串口協(xié)議與ESP8266 WiFi芯片通信,并結(jié)合藍(lán)牙信標(biāo)定位技術(shù),實(shí)現(xiàn)了軟硬件協(xié)同控制系統(tǒng),使得本系統(tǒng)具有環(huán)境信息捕獲、信息處理及上傳數(shù)據(jù)和存儲(chǔ)等基本功能。本系統(tǒng)的實(shí)際應(yīng)用可降低倉(cāng)庫(kù)貨物搬運(yùn)成本,進(jìn)一步解放勞動(dòng)力,提高倉(cāng)庫(kù)貨物搬運(yùn)的自動(dòng)化程度。經(jīng)過(guò)初步驗(yàn)證,本系統(tǒng)已達(dá)到了設(shè)計(jì)的基本目的。
注:本文通訊作者為李春華。
參考文獻(xiàn)
[1] 曹永豪,劉付永紅,張鈿鈿,等.基于TC264的智能小車循跡系統(tǒng)設(shè)計(jì)[J].電子設(shè)計(jì)工程,2023,31(24):24-28.
[2] DUTT M D, SARIKA K, JAYANT D, et al. Smart farming:" monitoring of field status and control of irrigation using sensors and ESP8266 nodemcu module [J]. Journal of physics: conference series, 2023, 2570(1).
[3] 吳旭. 基于藍(lán)牙RSSI的室內(nèi)定位算法研究[D].成都:西南交通大學(xué),2022.
[4] 韓陽(yáng).基于UWB的礦用一體化智能車載終端的設(shè)計(jì)[J].煤礦安全,2024,55(2):218-222.
[5] 李?yuàn)檴櫍瑒Γ愋〔?基于RFID的工廠物流車輛調(diào)度系統(tǒng)研究[J].科學(xué)技術(shù)創(chuàng)新,2024(2):73-76.
[6] 黃曉宇,孫勇智,李津蓉,等.基于MPC的麥克納姆輪移動(dòng)平臺(tái)軌跡跟蹤控制[J].機(jī)械傳動(dòng),2023,47(11):22-29.
[7] 嚴(yán)遠(yuǎn)斌,宋蕾,余繼鵬,等.基于麥克納姆輪的物流機(jī)器人設(shè)計(jì)與技術(shù)研究[J].電子產(chǎn)品世界,2023,30(11):20-23.
[8] 陳博翁,范傳康,賀驥.基于麥克納姆輪的全方位移動(dòng)平臺(tái)關(guān)鍵技術(shù)研究[J].東方電氣評(píng)論,2013,27(4):7-11.
[9] 歷風(fēng)滿.數(shù)字PID控制算法的研究[J].遼寧大學(xué)學(xué)報(bào)(自然科學(xué)版),2005(4):85-88.
[10] 高蒙.基于機(jī)智云平臺(tái)的遠(yuǎn)程監(jiān)控系統(tǒng)開發(fā)關(guān)鍵技術(shù)研究[D].西安:西安理工大學(xué),2019.
[11] 王甜甜.基于移動(dòng)室內(nèi)信號(hào)傳輸損耗模型的研究[J].電腦編程技巧與維護(hù),2021(5):83-84.
[12] 鐘家弘,陶英婷.基于STM32的超聲波測(cè)距儀[J].物聯(lián)網(wǎng)技術(shù),2023,13(9):32-35.
[13] 曲海成,王馨心,歐陽(yáng)俊.基于融合混合域模塊與空洞卷積的紅外小目標(biāo)檢測(cè)[J].激光與光電子學(xué)進(jìn)展,2023,60(10):50-62.
