基于改進粒子群算法的物聯網節點分布規劃研究
2025-02-05 00:00:00景學紅景陽
物聯網技術 2025年3期
摘 要:在規劃物聯網節點分布過程中需要明確考慮到覆蓋范圍,確保節點能夠有效地傳輸數據和接收指令,因此提出基于改進粒子群算法的物聯網節點分布規劃方法。在此過程中,構建了物聯網節點分布規劃目標函數,確定了物聯網節點覆蓋約束條件,利用改進粒子群算法生成了節點最優分布規劃搜索流程,實現了目標函數求解,目標函數最優解即為最優的物聯網節點分布規劃方案。實驗結果表明,所設計方法的規劃目標覆蓋率、節點連通性、數據傳輸速率、節點能耗效率、節點分布適應性均較高,證明設計方法的規劃效果較好,具有實際應用價值。
關鍵詞:改進粒子群算法;物聯網;節點分布規劃;目標函數求解;通信覆蓋率;數據傳輸
中圖分類號:TP393.03 文獻標識碼:A 文章編號:2095-1302(2025)03-0-03
0 引 言
物聯網節點是連接物聯網與外界的重要媒介,也是物聯網運行的基礎[1-4]。物聯網節點具有較多功能,其可以通過傳感器收集環境參數和人員活動信息,接收來自上位機或云平臺的控制指令,實現設備遠程控制[5-6],并利用智能算法進行數據分析、處理、識別,從而確保數據安全性。隨著計算機的高速發展[7-8],物聯網對節點的自適應、可靠性要求提高,但受復雜傳輸環境的影響,節點傳輸存在覆蓋不均等問題,為此已有研究者提出了基于螢火蟲算法的節點分布規劃方法[4]以及考慮無線傳輸損耗的節點分布規劃方法[5]。但是這兩種方法由于受到多種因素的干擾,其節點分布規劃質量并不理想。
事實上,物聯網節點分布規劃是一個系統性的過程,需要考慮多個因素。首先應進行應用場景需求分析,明確節點功能和分布目標。其次需要考慮環境因素對節點分布性能和穩定性的影響,如溫度、濕度等。最后還需根據實際需求選擇合適的通信協議,不同的通信協議有不同的傳輸距離和覆蓋范圍。因此,需要找到合理的平衡點。根據上述重要分布規劃因素,本文提出基于改進粒子群算法的物聯網節點分布規劃方法。
1 物聯網節點改進粒子群算法分布規劃方法設計
1.1 構建物聯網節點分布規劃目標函數
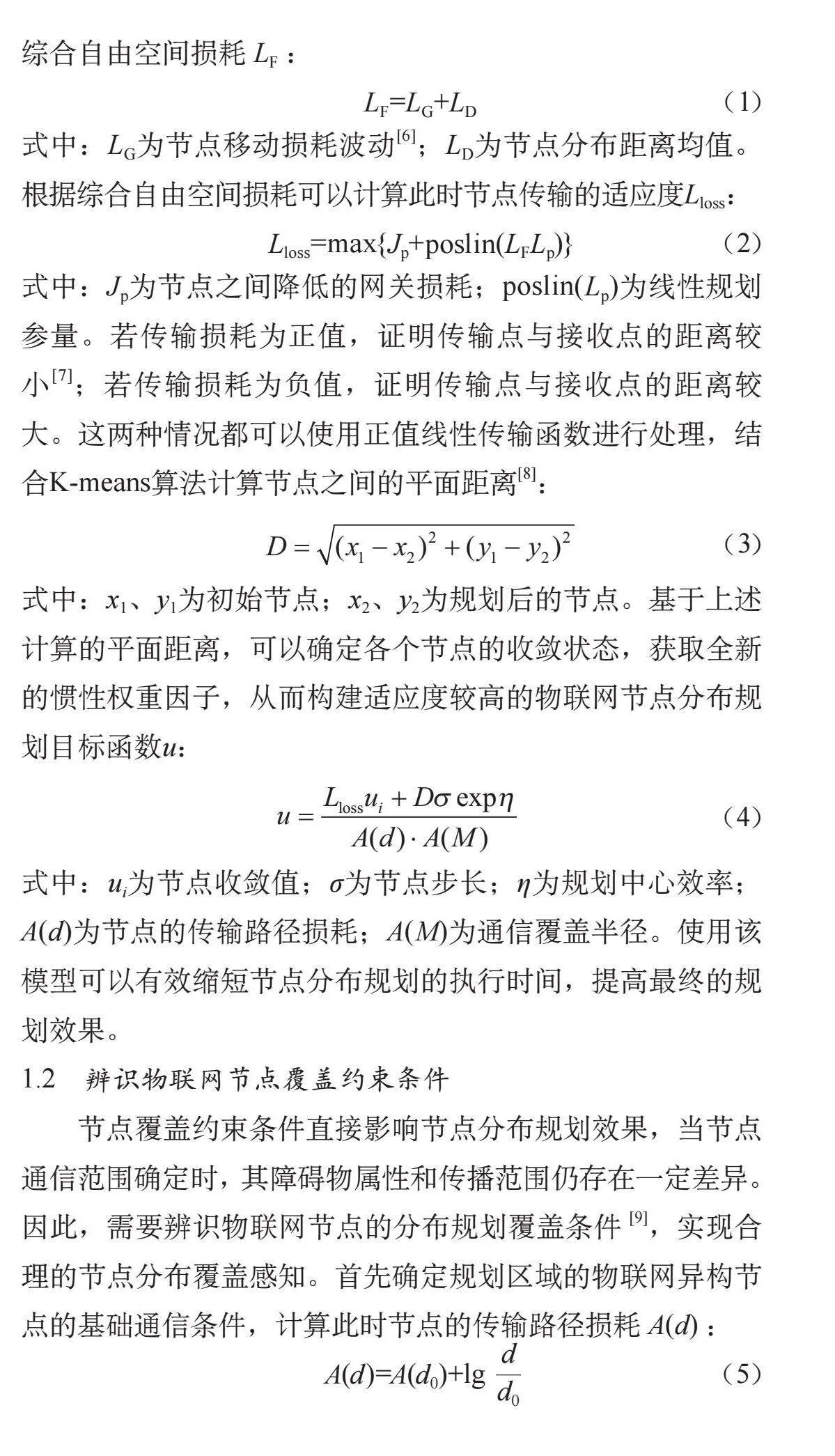
在物聯網節點傳輸過程中,會產生自由空間損耗,為降低其對節點分布規劃造成的影響,本文根據節點分布規劃適應性關系構建物聯網節點分布規劃目標函數。首先計算節點綜合自由空間損耗LF:
LF=LG+LD (1)
式中:LG為節點移動損耗波動[6];LD為節點分布距離均值。根據綜合自由空間損耗可以計算此時節點傳輸的適應度Lloss:
Lloss=max{Jp+poslin(LFLp)} (2)
式中:Jp為節點之間降低的網關損耗;poslin(Lp)為線性規劃參量。若傳輸損耗為正值,證明傳輸點與接收點的距離較小[7];若傳輸損耗為負值,證明傳輸點與接收點的距離較大。這兩種情況都可以使用正值線性傳輸函數進行處理,結合K-means算法計算節點之間的平面距離[8]:
(3)
式中:x1、y1為初始節點;x2、y2為規劃后的節點。基于上述計算的平面距離,可以確定各個節點的收斂狀態,獲取全新的慣性權重因子,從而構建適應度較高的物聯網節點分布規劃目標函數u:
(4)
式中:ui為節點收斂值;σ為節點步長;η為規劃中心效率;A(d)為節點的傳輸路徑損耗;A(M)為通信覆蓋半徑。使用該模型可以有效縮短節點分布規劃的執行時間,提高最終的規劃效果。
1.2 辨識物聯網節點覆蓋約束條件
節點覆蓋約束條件直接影響節點分布規劃效果,當節點通信范圍確定時,其障礙物屬性和傳播范圍仍存在一定差異。因此,需要辨識物聯網節點的分布規劃覆蓋條件[9],實現合理的節點分布覆蓋感知。首先確定規劃區域的物聯網異構節點的基礎通信條件,計算此時節點的傳輸路徑損耗A(d):
A(d)=A(d0)+lg (5)
式中:A(d0)為綜合損耗;d為近地參考距離;d0為規劃衰減因子。此時結合發送節點與接收節點的距離值表現關系調整接收信號環境中的障礙衰減因子[10],基于此得到的通信覆蓋半徑A(M)如下:
A(M)=A(d)+BF (6)
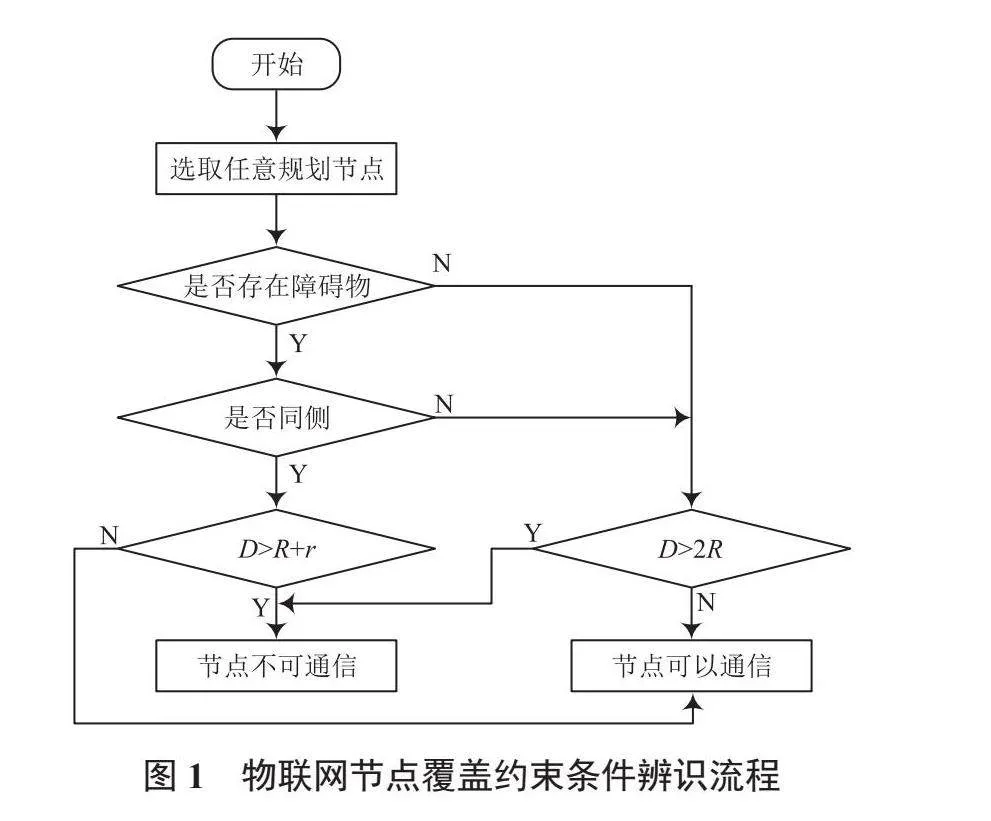
式中:BF為無障礙物影響下的通信覆蓋率[11]。由此生成物聯網節點覆蓋約束條件辨識流程,如圖1所示。
由圖1可知,根據上述分布規劃覆蓋條件可以確定目標節點的歐氏距離,設定網格化分布規劃范圍,最大程度上降低外界干擾對節點虛擬力計算造成的影響,提高物聯網節點分布規劃的適應性。
1.3 基于改進粒子群算法的目標函數求解
改進粒子群算法是一種優化算法,其能夠有效解決物聯網節點分布規劃面臨的局部最優解、收斂速度慢等問題。因此,本文基于改進粒子群算法生成了節點最優規劃搜索流程,從而實現目標函數求解。即將物聯網中的節點類比為粒子,采用鄰居粒子信息作為全局最優信息,jz(t)的計算式如下:
jz(t)=argmaxr(t) (7)
式中:r(t)為對比規劃范圍內的局部最優粒子標號信息[12]。此時可以對比通信范圍內最優的粒子分布信息,得到最優規劃搜索解qz(t):
qz(t)=argmax rk(t)·jz(t)·u(t) (8)
式中:rk(t)為粒子特征維度向量。根據上述計算式可以判定規劃節點的剩余能量值,生成節點最優規劃搜索流程。首先判斷鄰居粒子在不同時刻的剩余能量關系,對規劃粒子群進行標號,然后獲取局部最優的信息值,在全局范圍進行搜索。在實際物聯網節點分布規劃過程中,需要考慮粒子移動過程中的覆蓋狀態,即根據MANET粒子構造方式對平均冗余度進行標號,確定粒子節點的位置坐標。使用上述最優規劃搜索流程可以從能量角度改進節點的分布規劃狀態,最大程度上提升節點分布規劃的擴展性,從而保證物聯網節點分布規劃質量。
2 實 驗
2.1 實驗準備
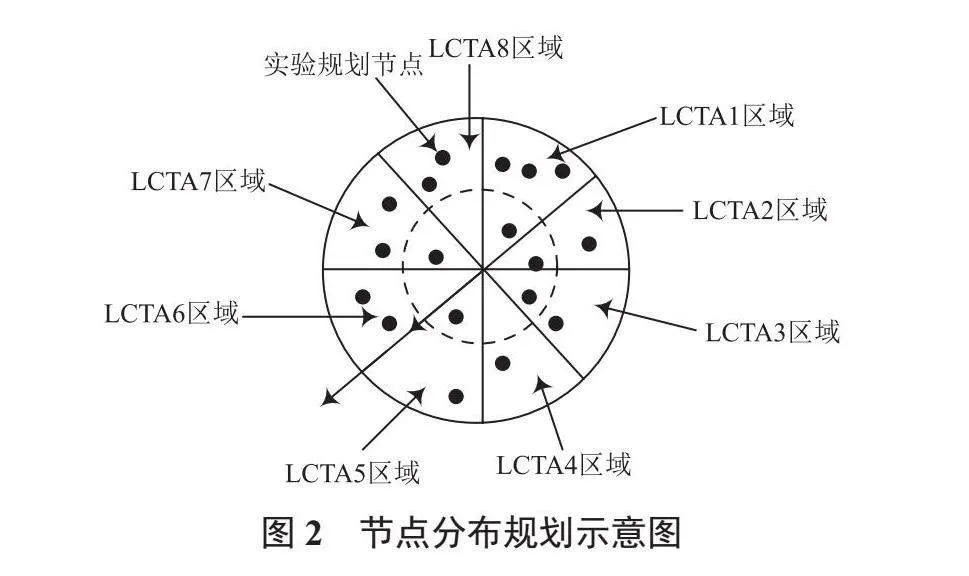
結合物聯網節點分布規劃實驗要求,選取Windows 10 MATLAB為仿真實驗環境,將物聯網節點隨機部署在500 m×500 m范圍內,設置實驗基站。此時各節點融合能耗為5 nJ,數據傳輸大小為4 000 bit,實驗傳感器初始能量為0.5 J,自由空間能耗較高。設置的部分實驗節點及節點分布規劃區域示意圖如圖2所示。
由圖2可知,實驗前需要確定節點分布狀態和最佳簇首數量,同時確定實驗基站與節點的距離,獲取規劃參量。最后判斷節點位置是否滿足收斂準則,并進行調整。實驗選取Sink路由獲取節點分布規劃指令,優化通信距離,從而提高實驗結果的可靠性。
選取節點分布規劃目標覆蓋率、節點連通性、數據傳輸速率、節點能耗效率、節點分布適應性作為實驗指標。這些實驗指標越高,證明物聯網節點分布規劃效果越好,反之則較差。
2.2 實驗結果與討論
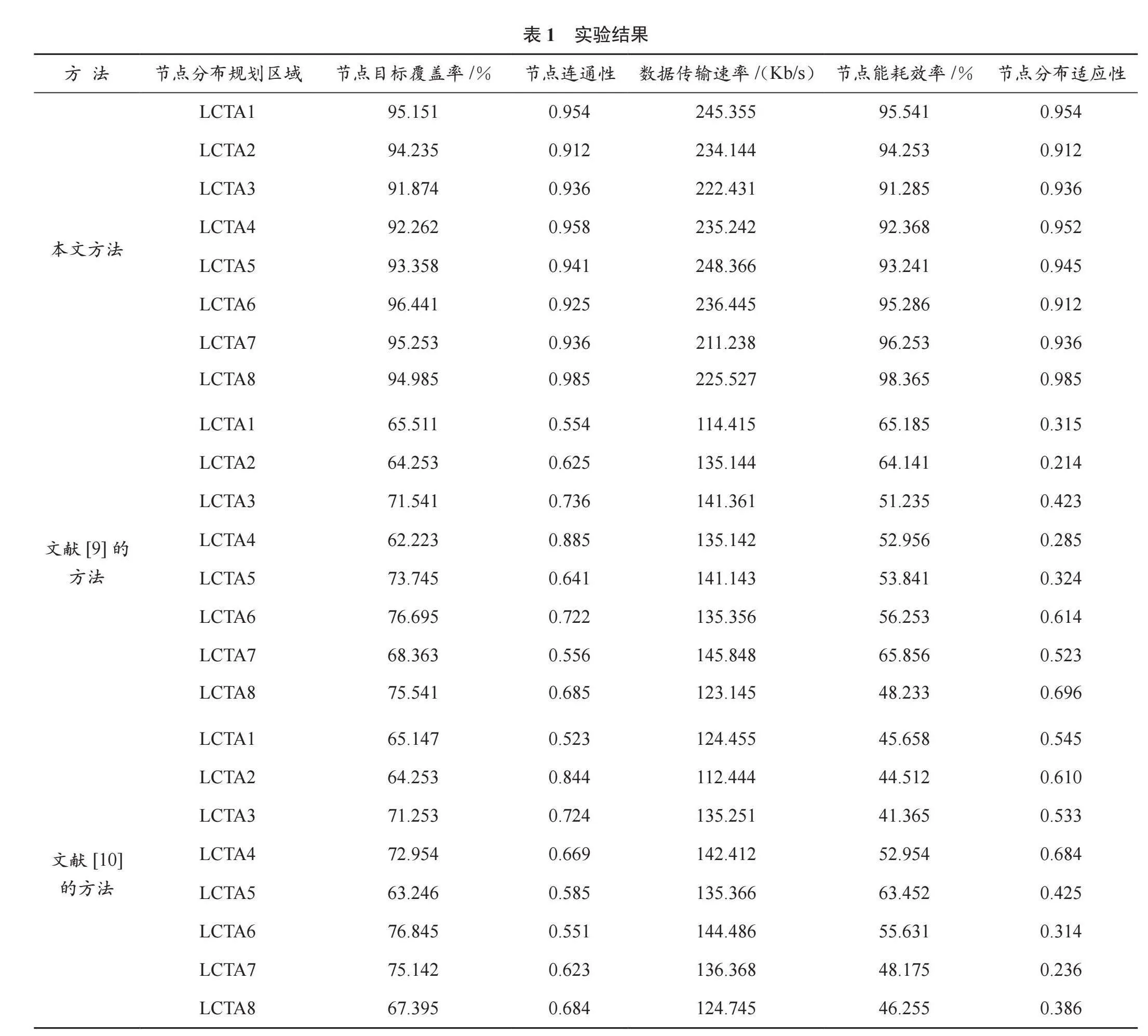
根據物聯網節點分布規劃實驗要求,本文選取LCTA1~LCTA8作為分布式規劃區域,此時分別使用本文方法、文獻[9]方法和文獻[10]方法進行規劃。實驗結果見表1。
由表1可知,本文方法的規劃目標覆蓋率、節點連通性、數據傳輸速率、節點能耗效率、節點分布適應性均較高;文獻[9]方法和文獻[10]方法的規劃目標覆蓋率、節點連通性、數據傳輸速率、節點能耗效率、節點分布適應性相對較低,證明本文設計的規劃方法的規劃效果較好。
3 結 語
在信息化背景下,物聯網技術發展迅速,應用需求不斷變化,而物聯網節點分布復雜,不利于數據采集與遠程控制,因此,本文提出基于改進粒子群算法的物聯網節點分布規劃方法。實驗結果表明,設計方法的規劃效果較好,具有可靠性,為提高物聯網的通信質量、降低節點傳輸局限性作出了一定的貢獻。
參考文獻
[1]張震,蓋昊宇,朱煉,等.基于節點連通性的物聯網鏈路傳輸負載均衡控制方法[J].重慶科技學院學報(自然科學版),2023,25(6):79-84.
[2]龍艦涵,李平. 5G通信中基于二分圖匹配的鏈路均衡負載方法研究[J].計算機應用與軟件,2022,39(8):139-144.
[3]劉麗娟,劉定一,陳松楠.考慮負載均衡與傳輸速率的異構網絡接入控制[J].計算機工程與設計,2021,42(6):1535-1541.
[4]劉敬玲,黃家瑋,蔣萬春,等.數據中心負載均衡方法研究綜述[J].軟件學報,2021,32(2):300-326.
[5]張珂,蔡熙桐,霍洪雙.基于2.4G無線收發模塊的低成本農業物聯網節點軟件設計[J].齊齊哈爾大學學報(自然科學版),2023,39(6):53-57.
[6]林甄,謝金冶,田碩,等.基于農業物聯網的無線通信技術實驗研究[J].農機化研究,2022,44(6):188-193.
[7]何湘桂,孟志強,周華安.基于LoRa物聯網的城市道路照明能耗與竊電監測系統[J].湖南大學學報(自然科學版),2023,50(10):11-19.
[8]田旭飛,姚凱學,王凱鵬,等.基于LoRa和STM32的路燈自動監控系統的研究[J].計算機工程與科學,2021,43(8):1470-1478.
[9]劉艷.基于螢火蟲算法的移動通信網絡節點最優路徑規劃[J].信息與電腦(理論版),2022,34(24):72-74.
[10]謝家興,梁高天,高鵬,等.考慮無線傳輸損耗的農業物聯網節點分布規劃算法研究[J].農業機械學報,2022,53(5):275-281.
猜你喜歡
現代電子技術(2016年24期)2017-01-19 14:59:24
中國科技博覽(2016年22期)2016-11-01 14:12:26
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
中國科技博覽(2016年16期)2016-09-19 00:14:16
環球時報(2016-08-01)2016-08-01 07:04:45
電腦知識與技術(2016年11期)2016-06-17 20:45:47
科技視界(2016年11期)2016-05-23 17:44:00
