晶閘管-直流電動機調速系統信號極性的確定
2009-09-18 06:02:40李秀香徐敏
職業·下旬 2009年6期
李秀香 徐 敏
晶閘管-直流電動機調速系統是職業學校電氣自動化專業學習的內容,是維修電工工種高級工、技師職業資格鑒定的重要內容之一。 在講授閉環調速系統時,各控制單元輸入信號極性的確定是個難點,筆者一直擔任直流調速系統模塊的教學工作,現就信號極性的確定方法談一下自己的體會。
一、根據反饋的概念確定信號的極性
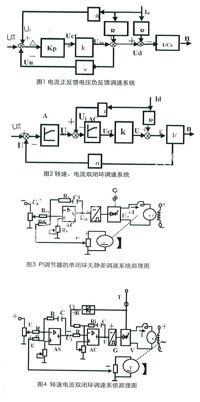
在直流調速系統中,反饋的過程為:取出一部分或全部系統輸出信號(電壓或電流)反饋到系統的輸入端,與輸入信號(電壓或電流)相合成。反饋的類型有正反饋和負反饋,即對輸入信號起加強作用的為正反饋,起削弱作用的為負反饋。若為負反饋則反饋信號與輸入給定信號相反,正反饋則反饋信號與輸入給定信號極性一致,根據這一原則,如在圖1所示帶電流正反饋的電壓負反饋調速系統靜態結構圖中:Ui是電流正反饋信號,極性為“+”,Un*為輸入給定信號,極性為“+”;Uu為電壓反饋信號, 極性為“-”;Un*與Ui極性一致,則為正反饋;Un*與Uu極性相反,則為負反饋。所以此系統是帶電流正反饋的電壓負反饋調速系統。
又如在圖2中的電流、轉速雙閉環調速系統中 ,若Un*極性為“+”,則轉速反饋信號Un極性為“-”; ASR的輸出是“+”,電流負反饋的信號Ui為“-”。Un*與Un的極性相反,確保為負反饋;與Ui的極性相反,構成負反饋。因此,本系統為電流、轉速負反饋雙閉環調速系統。有了負反饋后本系統具有良好的靜、動態控制性能。
二、根據各控制單元的工作原理確定信號的極性
學生可以通過驗證性實驗來進一步理解系統的控制過程和控制性能比較,理解給定信號和反饋信號的極性是要變化的,根據系統各控制單元的原理來確定信號的極性。如圖3為轉速單閉環調速系統,ACR是PI調節器,為反相放大器,由觸發器GT的工作原理,其控制電壓Uct必須為“+”,為保證Uct為“+”,那ACR的輸入信號電壓Un*的極性必須為“-”,即為負給定,因此轉速負反饋信號的Un在由TG兩端取出時其極性要為“+”,保證為負反饋。在實際接線中一定要注意TG兩端電壓的正負極連線不要接錯。與電流轉速雙閉環調速系統相比較。圖4中,系統用了兩個PI調節器,ASR和ACR,這兩個調節器串聯,ASR的輸出作為ACR的的輸入,由它們的工作原理來確定給定信號電壓Un*必為+”,輸入到ASR,ASR輸出為“-”;輸入到ACR,ACR輸出信號Uct的極性為“+”;從二滿足了觸發器TG的要求,反饋信號Un在從TG兩端取出時極性為“-”。在實際接線中單閉環與雙閉環在此環節的接線是不一樣的,在指導學生實驗過程中,要特別注意。
三、結束語
直流調速系統各控制單元信號極性的確定是重點也是難點的教學內容,學生學會分析判斷信號的方法,就能熟練掌握本模塊的知識,提高實際動手操作的能力。上述兩種方法也可以結合起來運用,那樣知識會掌握得更加牢固、扎實。
(作者單位:青島市高級技工學校)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25