基于lab空間和圖像形態學的車牌定位算法
2010-04-11 08:06:58何斌張小寧
制造業自動化 2010年11期
關鍵詞:區域
徐 雷,何斌,張小寧
XU Lei1, HE Bin2, ZHANG Xiao-ning1
(1. 同濟大學 道路與交通工程教育部重點實驗室,上海 200092;2. 同濟大學 電子與信息工程學院,上海 200092)
基于lab空間和圖像形態學的車牌定位算法
A method of license plate locating based on lab and mathematical morphology
徐 雷1,何斌2,張小寧1
XU Lei1, HE Bin2, ZHANG Xiao-ning1
(1. 同濟大學 道路與交通工程教育部重點實驗室,上海 200092;2. 同濟大學 電子與信息工程學院,上海 200092)
車牌定位是車牌識別系統LPR的關鍵技術之一。根據Lab顏色空間b通道特性,本文提出了一種Lab空間下的車牌定位方法。該方法首先針對b通道圖像設計了一種判斷車牌顏色的算法;之后對不同顏色車牌選取不同的閾值范圍進行迭代運算,得到最優分割閾值,并對二值化圖像進行形態學處理;最后選取連通域的面積大小、長寬比及灰度跳變次數來篩選出真實車牌區域。實驗表明,該方法準確率較高,耗時短,受光照、背景環境影響較小。
車牌定位;Lab空間;數學形態學
0 引言
車牌識別技術LPR(License plate recognition)的研究始于20世紀80年代[1],它的任務是自動采集交通圖像,分離出車牌區域,并完成字符的分割與提取。車牌定位、字符分割、字符識別是LPR的三個關鍵技術,其中車牌區域快速有效的定位,是完成字符分割和識別的基礎,定位準確率在整個識別流程中起到至關重要的作用。目前車牌定位的算法主要有基于灰度圖的算法[2~4]和基于顏色空間特性的算法[5,6],前者具有時間復雜度小的優點,但遇到光線較暗、光照不均等情況,識別準確率會有所下降;后者利用了顏色通道的特性,受光照等外部環境影響較小,尤其與形態學、小波等數學方法相結合時定位效果較好。
考慮到Lab顏色空間藍、黃兩色分離的特性,本文提出了一種Lab顏色空間下的車牌定位方法。Lab空間b通道存儲的是藍、黃兩色的顏色信息,一個像素點的顏色越藍,在b通道的數值就越小,反之顏色越黃數值越大,這種特性使得選取一個合適的閾值來分割出圖像中的藍、黃車牌能夠得以實現。經過大量實驗分析,選取一個經驗閾值來判斷圖像中的車牌顏色,對于藍色和黃色車牌分別限定一個閾值的選取范圍,通過迭代確定出最優分割閾值,得到二值圖像。不同的原始圖像經過二值化和形態學運算后,得到數量不一的車牌候選區域,此時再根據車牌自身特性進行車牌區域的篩選,如面積、車牌長寬比、水平灰度跳變次數等,最終得到唯一的車牌區域。圖1為該方法的技術路線。

圖1 Lab空間下車牌定位的技術路線
1 b通道分割閾值的確定
攝像機采集到的圖像大多是RGB顏色空間的,故首先應將車牌圖像由RGB顏色空間轉換到Lab顏色空間[7]。
我國的標準車牌由藍底白字、黃底黑字、白底黑字和黑底白字4種顏色對組成,其中又以藍底白字的最多,其次為黃底黑字。在Lab顏色空間中,由于藍色和黃色分居b分量的兩頭,因此根據b分量的值可以比較容易地判斷出是藍色還是黃色。利用這一特性,對b通道圖像選取合適的閾值進行二值化,能夠有效的分離出黃色和藍色車牌區域。
b通道矩陣的數值范圍是-128~127,為了在matlab中正常顯示圖像,需將矩陣中的數據映射到0~255的范圍區間。原始圖像和轉換后的Lab空間b通道圖像分別如圖2和圖3所示。

圖2 原始RGB圖像

圖3 b 通道圖像
對于含有藍色車牌的圖像(以下簡稱藍牌圖像),車牌區域的像素點藍色飽和度相對較高,在b通道的圖像中,車牌區域顯示為一個較暗的區域,且與周圍像素的對比度較大。而對于含有黃色車牌的圖像(以下簡稱黃牌圖像),在b通道圖像中車牌區域顯示為一個較亮的區域。據此,分別對藍牌圖像和黃牌圖像選取一個適當的閾值thB和thY進行二值化,即可把車牌區域較好的分割出來。
由于藍、黃車牌圖像具有不同的統計特性,thB和thY不是像thB=255 - thY這樣一種簡單的對應關系,應首先將藍牌圖像和黃牌圖像區分開來。據此,本文設計了一種區分藍、黃車牌圖像的算法:以一個初始判定閾值th1=50對b通道圖像進行二值化,統計二值化圖像中黑色像素點的比例,若比例超過了門限值η=0.05,判定此圖像為黃牌圖像,反之若比例小于門限值η,則判定為藍牌圖像。
此外,為了更好的適應光照、背景條件等環境變化,提高定位精度,本文對分割藍色車牌閾值thB和分割黃色車牌閾值thY分別設定了一個選取范圍,通過閾值迭代的方法來選定最優閾值。經大量實驗分析,將thB的范圍定為50~80,thY的范圍定為110~140。
黃牌圖像二值化后車牌候選區域為白色,而藍牌圖像二值化后車牌候選區域為黑色,故還要對后者做一次反向操作,以使車牌候選區域統一為白色,背景統一為黑色,從而有利于后續算法的簡化。圖3兩幅圖像的二值化及相應的反向操作結果如圖4所示。

圖4 b通道圖像二值化及相應反向操作結果
2 形態學運算
數學形態學的基本思想是用具有一定形態的結構元素去度量和提取圖像中的對應形狀,以達到對圖像進行分析和識別的目的[8],其基本運算包括腐蝕、膨脹、開啟和閉合四種。設g為結構元素,f為輸入圖像,對二值圖像其數學描述為:
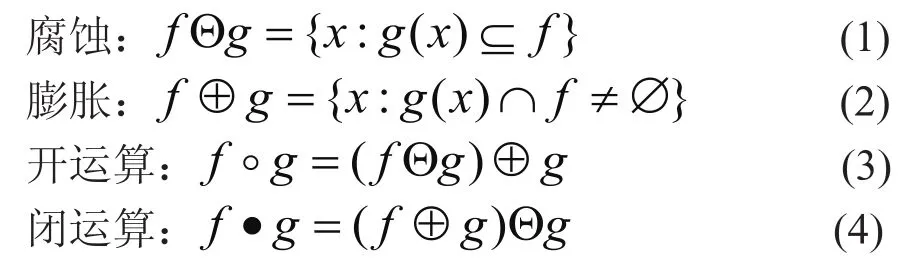
其中開運算可以消除細小物體,閉運算可以填充物體內細小空洞。
經試驗分析,本文針對藍牌圖像得到的二值圖像進行的形態學運算步驟為:首先用半徑為6的disk(圓盤形)結構元做閉合運算,以消除細小物體和不同物體間的細小連接線;再用半徑為2的disk結構元做開啟運算,以填充車牌區域小的孔洞或斷開的區域,使之連成為一個整體;最后考慮到實驗中經常出現的車牌區域橫向變短的情況,用大小[2,15]的矩形結構元做一次膨脹運算。針對黃牌圖像得到的二值圖像進行的形態學運算步驟為:用半徑為3的disk結構元依次做一次開啟和閉合運算。圖4的形態學運算結果如圖5所示。

圖5 形態學運算結果
3 車牌區域篩選
經形態學運算后,得到若干個車牌候選區域,為了得到唯一且正確的車牌區域,需要根據車牌特性進行進一步的篩選。我國汽車牌照具有一些相對固定的幾何、顏色特征,如車牌長寬比為固定值、字符和背景對比度較大、車牌區域灰度跳變次數多等。為使算法具有較高的篩選準確率,采取面積大小、長寬比及灰度跳變次數來綜合判別車牌區域。
面積大小是指各連通域內白色像素點的個數,面積過小或過大的連通域都可排除出候選區域。根據攝像機與采集點距離的不同,面積篩選的范圍也有所不同,應根據具體環境選擇合適的面積篩選范圍。本文選取的范圍為1500~4000,大小不在其間的連通域直接被排除。
我國車牌的長寬比相對固定,一般在3~4之間[2],考慮到形態學運算過程中連通域的大小會發生一定變化,故限定篩選范圍為2.5~4.5,長寬比不在其間的被排除。
此外,根據車牌字符和背景對比度較大的特性,對經過前兩步篩選后剩余的每個連通域依次進行如下操作:1)在原彩色圖中剪切出對應區域并灰度化;2)對灰度圖進行水平梯度運算;3)選取圖像的中間一行檢測灰度跳變次數,若大于14則判定為車牌區域,反之排除該連通域。
圖5的車牌區域篩選結果如圖6所示,最終車牌定位結果如圖7所示。

圖6 對車牌候選區域的篩選結果

圖7 最終車牌定位結果
4 實驗結果與分析
算法的實驗平臺為matlab7.0,選取在路邊同一地點隨機拍攝的89幅車牌圖像進行測試(測試前將車牌圖像大小歸一化為300*400),定位結果如表1所示。

表1 實驗結果
藍色車牌圖像有4幅未定位,其中有2幅是車、牌同色,且車牌沒有金屬邊框,這種情況下在b通道圖像中車牌區域和車身連為一體,使得二值化過后車牌區域與周圍背景合成一個大的連通域,這樣在后續的面積篩選步驟中該區域就被篩選掉了,無法實現準確定位。另有兩幅圖像未成功定位的原因是車牌區域污染嚴重,粘著大量泥土導致車牌顏色飽和度降低,且字符與車牌背景的對比度減小,這使得對b通道二值化的過程中在整個閾值選取范圍內無法找到最優閾值,并且在灰度跳變篩選車牌區域這一步,有可能使得統計得到的灰度跳變次數不滿足要求,從而定位失敗。
黃色車牌有2幅未定位,經分析,其原因可認為是照相機曝光參數(光圈、感光度ISO)與拍攝其他圖像時的曝光參數不一致,致使無法準確判別是否為黃色車牌圖像。顯然,針對不同的天氣、光照和道路環境,判別藍、黃車牌的門限值也不盡相同,需根據具體條件進行調整。
5 結論
Lab顏色空間的b通道圖像能夠很好的區分藍、黃兩種顏色,我國大部分車牌為藍底白字和黃底黑字,故基于Lab空間的車牌定位算法具有較高的實用性。
該算法優點主要有:算法的實現基于Lab空間的b通道顏色特性,因此受光照條件影響較小;L通道和a通道的數據被忽略,故算法的執行時間較短,大體上與基于灰度圖的算法相同;與灰度圖二值化得到的圖像相比,b通道二值化得到的圖像干擾因素較少,大部分圖像經面積篩選和長寬比篩選后,即可定位到車牌區域。
當然,算法對于車身、車牌同色,并且車牌沒有明顯金屬邊框的情況,在二值化過程中車牌區域與背景容易連接在一起,從而無法實現準確的定位;此外,在不同的光照、道路環境條件下,對于判別藍、黃車牌的閾值th1的選取并不相同,只能對具體環境下采集到的車牌圖像進行統計后得到。車、牌同色的定位和自適應閾值將是進一步研究的重點。
[1] 李孟歆,吳成東.基于分級網絡的車牌字符識別算法[J].計算機應用研究,2009,26(5):1703-1705.
[2] 陳虹,陳蕾,蔣毅.基于邊緣檢測及數學形態學的快速汽車車牌定位[J].交通與運輸,2008(12):78-81.
[3] 鄒曄.基于紋理分析和梯度特征的車牌定位算法[J].科技廣場,2009(5):109-111.
[4] 韓麗萍,藥春暉,張文格,等.基于小波變換與形態學的車牌定位方法[J].測試技術學報,2006,20(1):46-49.
[5] 王學偉,薛迎衛.XYZ空間與小波能量特征融合的車牌定位[J].北京化工大學學報(自然科學版),2010,37(1):122-125.
[6] 王枚,王國宏,潘國華.基于HSV空間的車牌定位方法[J].煙臺大學學報(自然科學與工程版),2007,20(1):48-52.
[7] Lianghai Jin,Dehua Li.A switching vector median filter based on the CIELAB color space for color image restoration[J].Signal Processing,2007,87:1345-1354.
[8] 史忠科,曹力.交通圖像檢測與分析[M].北京:科學出版社,2007.
TP391
A
1009-0134(2010)10(上)-0011-04
10.3969/j.issn.1009-0134.2010.10(上).03
2010-03-06
徐雷(1987 -),男,河南濟源人,碩士研究生,研究方向為圖像處理與模式識別。
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15
