考慮駕駛員個體特性的汽車安全行駛間距模型
2010-06-04 09:15:22邊明遠
中國機械工程 2010年12期
邊明遠
清華大學汽車安全與節能國家重點實驗室,北京,100084
0 引言
交通事故已成為現代社會的一大公害。據統計,汽車碰撞事故約占全部交通事故的60%~70%。而汽車碰撞事故大多是因為行車速度過快、行車間距過小、剎車不及時等因素造成的[1]。資料顯示,有70%~90%的交通事故是由于駕駛員操作失誤所致[2]。汽車主動避撞系統能夠在事故發生前提醒駕駛員注意并在緊急狀況下自動采取安全措施。
汽車行駛安全狀態判斷是汽車主動避撞系統功能實現的基礎,而其核心內容之一是提出有效的安全車距模型。
從提高汽車主動避撞系統實用性出發,安全距離模型要保證多數交通情況下主動避撞系統正常工作,減小由于誤判斷造成誤操作的可能性。在保證安全的基礎上,應以實際交通情況下駕駛員的駕駛特點作為安全距離模型建立的基礎。
具有不同經驗技能的駕駛員對安全跟車車距有不同的衡量標準,而駕駛員不同的身體及心理狀況等個人因素,以及路況、天氣、行車環境等都對車輛安全行駛狀態的判別有影響。因此,作為車輛行駛安全狀態判斷標準的安全車距模型也必須同時反映出人、車、行駛環境狀態的差異,使車輛防碰撞安全預警系統能滿足不同駕駛員的個性化特征或駕駛狀態,這樣才能降低避撞系統的虛警率、誤警率,在促進交通安全的同時提高交通效率。
本文在總結國內外關于主動避撞安全車距模型研究的基礎上,分析了影響跟隨車輛減速避撞操作的人的各種因素,提出了一種考慮駕駛員個體特征的安全行駛車輛間距模型,并通過不同行駛工況下的仿真及對比分析驗證了模型的有效性。
1 基于車輛制動過程的安全距離模型
在主動避撞系統安全車距模型和車輛安全行駛狀態的判別方面,國內外進行了廣泛的研究,但基本上都是參照理論上的安全跟車距離模型,較少考慮人的因素、車輛因素和環境因素對車輛安全行駛狀態界定的影響,因此,往往會出現系統虛警率較高、可靠性不太高等問題。
下式為基于車輛制動過程運動學分析的安全距離模型[3-7]:

式中,v1、v2、a1、a2分別為自車及前車的速度及制動減速度;d0為兩車靜止時應保持的最小安全距離;tx為自車制動系統協調時間,對于采用液壓制動系統的車輛,一般為0.2s;thum為駕駛員的制動反應時間,包括駕駛員看到危險報警信號的心理及生理反應、判斷決策以及采取相應動作的時間,是駕駛員辨認行車情況并采取剎車動作的臨界反應時間。
式(1)是主動避撞系統采用較多的行駛安全狀態判定標準,它適用的典型交通情況是跟隨行駛過程中前方車輛突然制動(減速)至停止這種極端工況,模型建立時僅考慮了保證車輛行車安全的要求,沒有考慮道路交通效率方面的因素,因而利用該模型確定的安全距離趨于保守。同時,該模型建立過程中一個重要的參數 ——駕駛員制動反應時間,在國內外眾多的模型研究中都無法精確地選取,只能設定一個大致的范圍,約為0.3~2.0s,有的設為0.8~1.3s,這樣就必然造成所推導出的安全車距模型存在較大的誤差。
主動避撞系統的實質是搜集車輛及行駛環境的實時信息,對車輛的行駛安全狀態進行判別,給駕駛員提供安全報警和決策輔助,在駕駛員不能夠正確操作或決策時自動對車輛進行控制,保證行車安全。因此,作為核心的安全車距模型也往往據此分為提醒報警距離d w和極限報警距離d b兩個級別。其中,提醒報警距離應保證駕駛員有較充足的反應時間,并能進行正確的習慣操作。而極限報警距離則設定為非保守型,一方面是因為考慮到駕駛員已處于高度警惕狀態并做好了剎車準備,此刻不需要再加上駕駛員的反應時間,而只需考慮制動協調時間即可;另一方面,既要防止出現頻繁報警影響駕駛員的正常操作,又要分析車輛在不同運動狀態下的最危險時刻,保證在最危險時刻兩車間尚能保持安全距離db[8]。
根據文獻[8]的研究,設某一時刻在同一車道上行駛的2輛車輛,當自車發現前車緊急制動或減速而判斷存在危險傾向時,采用的兩級報警距離分別為
所以兩級報警車距存在如下關系:

由上述安全車距模型可以看出,在車輛提醒報警距離d w的確定過程中,自車的運動狀態和駕駛員的反應時間對模型的結果影響很大,而駕駛員的反應時間除了因駕駛員個體的駕駛經驗和技巧而各異外,還與駕駛員當時的生理、心理狀態,以及道路狀況、天氣狀況等行駛環境信息有關。除此之外,車輛應保持的最小安全距離d 0實際上也應該隨著駕駛員反應操作能力的差異而相應改變。
文獻[1]分析了人、車、路等因素對安全車距模型確定的影響,并采用加權因子的方法對常規報警安全車距模型進行了修正,但并未區分極限報警安全車距與駕駛員提醒報警安全車距模型,也未充分考慮駕駛員個體特征及駕駛環境等因素對構成這兩種車距模型的各部分參數的影響,而僅用一個加權因子乘以常規跟隨安全車距,其修正后的車距模型顯然是具有很大的局限性的。
2 基于駕駛員個體特征修正的安全車距模型
眾所周知,“人、車、環境”是行車安全保證的三個基本要素,所以車輛安全車距的模型要能夠反映這三個基本要素的變化。具體某車輛而言,“車”的因素相對穩定,所以本文重點研究“人、環境”對安全車距的影響,而環境的變化又往往通過對“人”的個體特征的影響表現出來。
不同駕駛員個體特征的差異主要包括駕駛經驗和技巧、年齡、生理及心理狀況等影響駕駛員對車輛操控能力和面對異常交通狀況時的反應、判斷和決策能力的個人狀態,而駕駛環境對駕駛員個體特征的影響或干擾主要體現在由于駕駛視野的變化而造成的使駕駛員反應和判斷能力的衰減。所以,要真實地反映實際駕駛工況的安全車距,必須體現以上因素的影響。
大多數安全跟車距離計算模型的推導過程一般是基于駕駛員類型、車輛狀況、自然環境、路況4個指標評估值均為一般值的情況下的車輛安全制動距離,模型中往往采用一個固定的制動反應時間和最小安全距離值。但是,如前所述,不同類型的駕駛員(有經驗的駕駛員、一般駕駛員、新手駕駛員),不同的生理狀態(狀態良好、疾病、疲勞等),不同的心理狀態(情緒良好、低落、煩躁等),不同的行駛狀態(低速、中速、高速等)、不同的行駛自然環境(雨天、霧天、冰雪天氣、白天、夜間等),對駕駛員的反應能力、對安全跟車距離的要求都有或多或少的影響。如果將一般的安全跟車距離計算模型應用于實際的車輛防碰撞系統中,那么對于同樣的車輛,在行駛過程中,一個具有豐富駕駛經驗和很好反應能力的司機,他會感覺到系統設定的安全跟車距離過大,一方面頻繁的不必要的報警提醒可能會使司機關掉系統,另一方面車輛在這種狀態下行駛會在一定程度上影響道路交通能力、降低運行效率;而對于一個新手駕駛員,他反而會覺得系統所設定的安全跟車距離過小,對他來說這個安全距離并不安全,系統的報警提醒時間并不及時。另外,對于相同技能的駕駛員,個人狀態良好時,他可能會感覺系統所設定的安全跟車距離過大,而在個人生理或心理狀態較差時,他可能會感覺到系統所設定的安全跟車距離過小,這些都不利于行車安全和高效運行。再者,在不同行車環境中,駕駛員對安全跟車距離的需求也會有一定差別。因此,基于駕駛員個體特征并反映駕駛環境情況的安全車距模型才能夠充分保障主動避撞系統的有效運行。
本文采用綜合加權評定的方法,以普通的駕駛員及一般駕駛工況為基準,對影響駕駛員反應能力的各種因素進行分析,對駕駛員的動態反應能力和適應的安全車距模型進行分析。
2.1 駕駛員制動反應時間及最小安全車間距修正模型
在同車道的車輛跟隨行駛過程中,當跟隨車輛的駕駛員看到前方車輛突然制動或減速時,往往要經過一系列的反應或動作過程,然后才能對車輛進行操控以避免追尾碰撞事故的發生。這個過程包括對前方車輛減速信號的觀察、前后車輛相對速度變化的對比、對未來時間前后車輛運動狀態的判斷、腳從油門踏板上放松及離開、腳踩上制動踏板并施加制動壓力等。在這個過程中,車輛維持其原來的運動狀態,其耗時稱為駕駛員的制動反應時間,隨駕駛員個體及狀態的差異而不同。而駕駛員踩完制動踏板之后車輛制動系統還會有一個動作響應的延遲,時間長短由制動系統的型式決定。
由于跟隨車輛在執行減速制動之前車速一般較高,所以制動反應時間的長短對安全車距的值影響較大,是避撞系統安全車距模型中一個重要的參數。如上所述,駕駛員制動反應時間隨“人、車、環境”因素的變化而變化,因此,車距模型也必須進行相應的修正才具備良好的適應性。
一般來說,影響駕駛員反應能力的人的因素可以分為業務技能(駕齡)、年齡、生理狀況、心理狀態四大方面,而環境因素的影響主要為正常天氣、雨雪天氣、霧塵天氣三方面加上晝夜環境等對駕駛員視野的影響。
以百分制為基礎,對以上影響制動反應能力的各種指標進行打分評估,因而可以形成對駕駛員反應時間進行評估的狀態向量:

假設上述各評價指標對駕駛員反應能力影響的權重指標為w,則各權重指標形成的權重向量為

采用綜合加權法構造以上各因素對駕駛員反應能力影響評估的函數,則有

上述評估函數y的結果體現為一個考慮各種因素的百分制的評估值,以普通駕駛員狀態指標為基礎,參考文獻[1],確定基于函數值y的駕駛員反應能力的修正因子為

參考多數文獻的研究成果[9-11],取一般駕駛員正常狀態下的制動反應時間t hum=1.25s,而駕駛員需求的最小停車安全間距d0=2.5m,則基于修正因子k的駕駛員制動反應時間和需求的最小停車安全間距的修正模型為

式中,tff為修正后的駕駛員反應時間;ds為修正后的最小停車安全間距。
2.2 基于駕駛員個體特征的安全車距修正模型
在主動避撞系統的兩級安全車距模型中,報警安全車距的目的是提醒駕駛員針對將要發生的碰撞事故采取相應的規避操作,因此駕駛員個體特征的差異必然會對該模型值的大小有不同的要求;而極限安全車距則為跟隨車輛針對即將發生碰撞的極限狀態而要求車輛控制系統自動執行規避動作的前后車距離,該模型更多地是與車輛及運動狀態相關,受駕駛員因素影響較小。基于以上分析,考慮駕駛員個體特性差異的主動避撞系統的兩級安全車距修正模型分別為

該兩級報警車距存在如下關系:

3 基于駕駛員個體特征安全車距模型的驗證
根據對相關資料的分析以及對多名不同類型駕駛員樣本的調查,確定了一組關于駕駛員駕駛經驗X 1(權重系數w 1)、駕駛員年齡X 2(權重系數w2)、駕駛員身體狀況X 3(權重系數 w3)、駕駛員精神狀況X4(權重系數w4)、由駕駛環境引起的駕駛員視野狀況X5(權重系數w 5)等5項影響駕駛員制動反應能力的評估指標的權重兩兩比較的比值,并由此計算出權重向量并進行歸一化處理。假設不同個體狀態的駕駛員在不同前后車跟隨行駛工況下進行減速避撞操作,對以上過程進行了仿真,仿真結果如圖1~圖6所示。
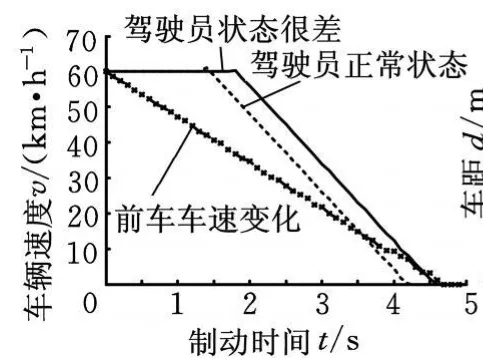
圖1 駕駛員狀態很差情況下的跟隨車制動反應情況
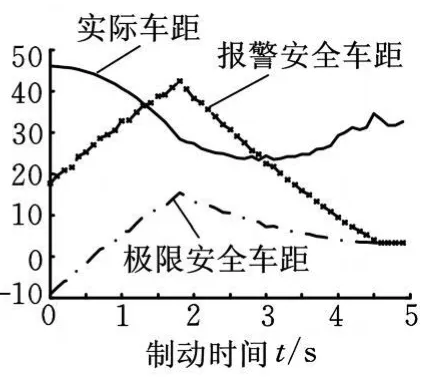
圖2 駕駛員狀態很差情況下的安全車距模型

圖3 駕駛員正常狀態下安全車距模型
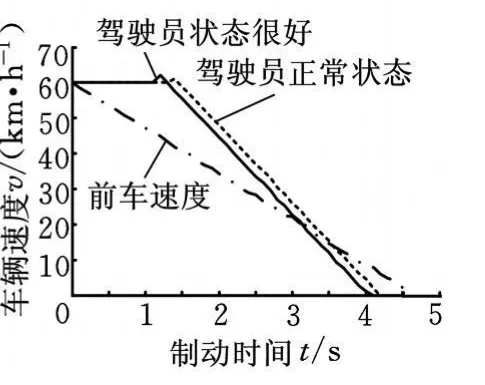
圖4 駕駛員狀態很好情況下的跟隨車制動反應情況
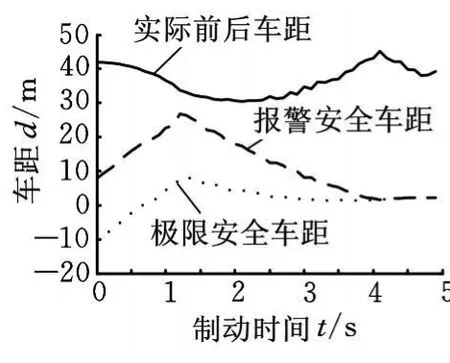
圖5 駕駛員狀態很好情況下的安全車距模型
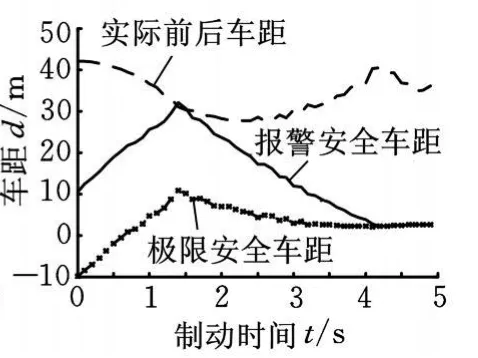
圖6 駕駛員正常狀態下安全車距模型
圖1 ~圖2示出了駕駛員個體狀態較差情況下前后車輛跟隨行駛的情況。前后兩車均以60km/h的初速度在良好路面上行駛,初始前后車距為46m,后車的駕駛員為新手,駕駛經驗不足,同時其生理狀態和心理狀態都不佳,駕駛環境的視野也很差。在行車過程中前車突然以3.5m/s2的減速度行駛,后車為了避免發生碰撞事故隨即采取制動減速操作。從圖1可以看出,普通駕駛員在正常狀態下經過約1.25s的反應時間后后車隨即采取制動減速措施,而狀態很差的駕駛員的反應時間較長,達到了1.62s,導致后車的制動操作延遲。從圖2可以看出,由于駕駛員制動反應時間過長而導致制動操作有較大延遲,所以需要的報警安全車距也更大,因此在后車跟隨行駛的過程中,在1.3~2.9s之間,前后兩車的實際車距小于報警安全車距而引發避撞系統報警。而在圖3所示的常規安全車距模型中,由于普通駕駛員的制動反應時間(1.25s)與狀態較差的駕駛員相比較小,所以其需要的報警安全車距值也較小,在整個行車過程中都小于前后車的實際車距,因而不會發生報警。但就圖2及圖3比較來看,兩者的極限安全車距的大小非常接近,顯示該距離模型受駕駛員個體特性因素影響較小。
圖4~圖5示出了駕駛員個體狀態很好情況下前后車輛跟隨行駛的情況。前后兩車均以60km/h的初速度在良好路面上行駛,初始前后車距為42m,后車的駕駛員駕駛經驗豐富,同時其生理狀態和心理狀態均很好,駕駛環境的視野也很好。在行車過程中前車突然減速,以3.5m/s2的減速度行駛,后車為了避免發生碰撞事故隨即采取制動減速操作。從圖4可以看出,普通駕駛員在正常狀態下經過約1.25s的反應時間后后車隨即采取制動減速措施,而狀態很好的駕駛員的反應時間則較短,約為了1.09s,因此后車的制動操作更加敏捷。從圖5可以看出,由于駕駛員制動反應時間較短且制動操作快捷,所以需要的報警安全車距也較小,在整個行車過程中都小于前后車的實際車距,因而不會發生報警。而在圖6所示的常規安全車距模型中,由于普通駕駛員的制動反應時間(1.25s)與狀態良好的駕駛員相比較大,所以其需要的報警安全車距值也較大,因此在后車跟隨行駛的過程中,在1.4~1.5s之間,前后兩車的實際車距小于報警安全車距引發避撞系統報警。但就圖5及圖6比較來看,兩者的極限安全車距的大小非常接近,顯示該距離模型受駕駛員個體特性因素影響較小。

圖7 普通駕駛員不同生理和心理狀態下安全車距模型
圖7 示出了駕駛員不同生理和心理狀態下前后車輛跟隨行駛的情況。前后兩車均以60km/h的初速度在良好路面上行駛,初始前后車距為45m,后車為普通駕駛員,駕駛環境的視野一般,在行車過程中前車突然減速,以3.5m/s2的減速度行駛,后車為了避免發生碰撞事故隨即采取制動減速操作。由圖7可以看出,無論是在駕駛員生理狀況還是心理狀況較差的情況下,所需的報警安全車距模型的值都要比正常狀態時偏大;但在駕駛員生理狀況較差的情況下報警安全車距的值比正常狀態有較大的偏差,而駕駛員心理狀況較差的情況下報警安全車距的值比正常狀態雖也有差距,但不太明顯,表明就生理與心理這兩種駕駛員個體因素而言,駕駛員的生理狀況差異對其反應能力和報警安全車距模型的影響更大。而在上述兩種情況下,極限安全車距的差距依然不明顯,受駕駛員個體因素影響較小。
4 結論
(1)作為主動避撞系統安全車距模型中的一個重要參數,駕駛員的制動反應時間受到駕駛經驗、駕駛員年齡、生理和心理狀況、駕駛員視野等諸多個體因素的影響,相應地,安全車距模型也應該隨駕駛員個體特性的差異而進行修正。
(2)運用綜合加權的方法分析了駕駛員個體因素對安全車距模型參數的影響,獲得了參數評估函數的狀態向量和權重向量,提出了基于修正因子的考慮駕駛員個體特性差異的避撞系統安全車距修正模型。
(3)通過不同行駛工況下的仿真驗證了提出的安全車距修正模型對不同駕駛員個體狀態的適應性。分析說明了駕駛員個體特性的差異主要影響報警安全車距,對極限安全車距的影響較小。
(4)駕駛員個體的生理與心理狀況兩種因素中,生理狀況因素對于安全車距模型的影響更大。
[1] 陳德海.真實環境下車輛行駛安全性綜合評價及防碰撞系統研究[D].贛州:江西理工大學,2007.
[2] Yi Kyongsu,Woo Minsu,Kim Sung Ha,et al.An Experimental Investigation of a CW/CA System for Automobile Using Hardware in the Loop Simulation[C]//Proceedings of the American Control Conference.San Diego,California,1999:724-728.
[3] 李曉霞,李百川,侯德藻,等.汽車追尾碰撞預警系統研究[J].中國公路學報,2001,14(3):93-95.
[4] 楊偉,徐杰,李宗平.高速公路上跟隨車安全距離的一種確定方法[J].四川工業學院學報,2001,21(1):20-22.
[5] 馬駿.高速公路行車安全距離的分析與研究[J].西安公路交通大學學報,1998,18(4):90-94.
[6] 王文清,王武宏,鐘永剛,等.基于模糊推理的跟馳安全距離控制算法及實現[J].交通運輸工程學報,2003,3(1):72-75.
[7] 徐杰,杜文,孫宏.跟隨車安全距離的分析[J].交通運輸工程學報,2002,2(1):101-104.
[8] 肖梅.高速公路追尾碰撞預防報警系統再研究[D].西安:長安大學,2003.
[9] Genya A,John R.Alarm Timing,Trust and Driver Expectation for Forward Collision Warning Systems[J].Applied Ergonomics,2006,37:577-586.
[10] Zhang Yizhen,Erik K A,Karl G.A New Threat Assessment Measure for Collision Avoidance Systems[C]//Proceedings of the IEEE ITSC 2006,2006 IEEE Intelligent Transportation Systems Conference.Toronto,2006:968-975.
[11] Nakaoka M,Pongsathorn R,Nagai M.Study on Forward Collision Warning System Adapted to Driver Characteristics and Road Environment[C]//International Conference on Control,Automation and Systems 2008,in COEX.Seoul,2008:2890-2895.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03