基于假設坐標系法的長定子直線同步電機無速度傳感器算法
2010-07-25 07:03:14葛瓊璇
電工技術學報 2010年2期
王 飛 葛瓊璇
(中國科學院電工研究所 北京 100190)
1 引言
長定子直線同步電機因為其效率高、爬坡能力強、轉彎半徑小等優點被應用于磁懸浮列車和一些城市軌道列車中作為驅動裝置。高性能的旋轉電機控制策略如磁場定向、直接轉矩控制等也被用于直線電機的控制系統中,如磁場定向控制已被成功應用于德國的TR系列磁懸浮列車牽引控制中。
磁懸浮列車采用磁場定向控制驅動電機,必須要獲知車體的位置和速度信息,這也是列車為保證高速狀態下的安全運行所必需的狀態參數。在實際系統中,列車的位置信息及其他運行參數是通過車載設備檢測,并以固定的頻率無線傳輸給地面控制中心[1]。這種方式傳輸范圍有限,需要沿著軌道建立地面基站,而且當列車運行速度增大時,固定的發送間隔中列車位置有很大變化,從而會使位置信息產生延遲,對列車的牽引控制以及運行安全產生不利影響。如果在控制單元中使用無速度傳感器算法,通過定子的電壓和電流來實時計算出動子位置,則可以減小信息的傳輸延遲,從而提高驅動控制的有效性以及系統的安全性。
本文所提出的無速度傳感器算法利用任意旋轉坐標系(假設坐標系)上的電機方程構造擾動觀測器計算反電動勢,并利用反電動勢通過反三角函數獲得該坐標系與實際dq坐標系之間的角度偏差,通過修正該偏差來獲得位置和速度信息。整套算法在IOWorks環境中開發,并在基于 VME總線的控制系統中進行了實驗驗證。
2 電機模型
同步旋轉坐標系 dq軸中長定子直線同步電機的電壓動態方程為[2-5]
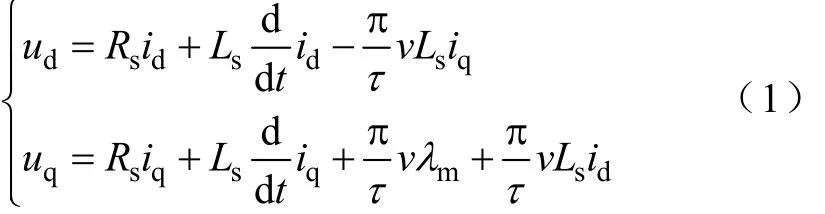
式中Ls,Rs——定子自感和電阻;
λm——動子磁鏈;
τ——定子極距;
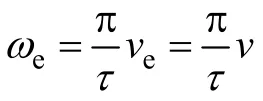
v——動子線速度,其與同步電角速度ω的關系為/vτω=π。
運動方程為

式中m——電機質量;
Fx——直線電機的牽引力;
Fl——負載阻力;
kw——風阻系數。
以上數學模型是電機中各變量的基波方程,由于長定子直線電機動子長度有限,在動子兩端截面會有較大漏磁通產生,存在端部效應,會對牽引力產生擾動。這種擾動往往在動子長度相對較短時較為明顯,當動子側極數較多而且在端部采用半極距時可以忽略[6]。
3 假設坐標系法
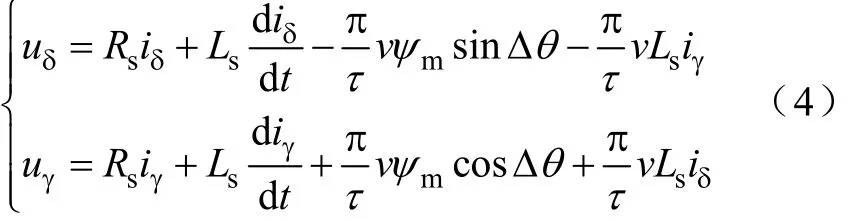
由圖1所示,電機動子位置角度用動子磁通正向(d軸)與A相定子繞組軸線之間角度來表示。在無位置和速度傳感器應用中該位置為未知量,用估算得到的θe來表示假設旋轉坐標系δγ的位置,ωe來表示其電角速度,并設δγ坐標系與實際dq坐標之間的角度誤差為Δθ。考慮到電壓方程的時間常數遠小于運動方程時間常數[7],在δγ坐標系的電壓方程中設估算速度已收斂到實際速度,且在一個電流采樣周期內為常數[8]:
δγ 坐標系里的電壓方程為

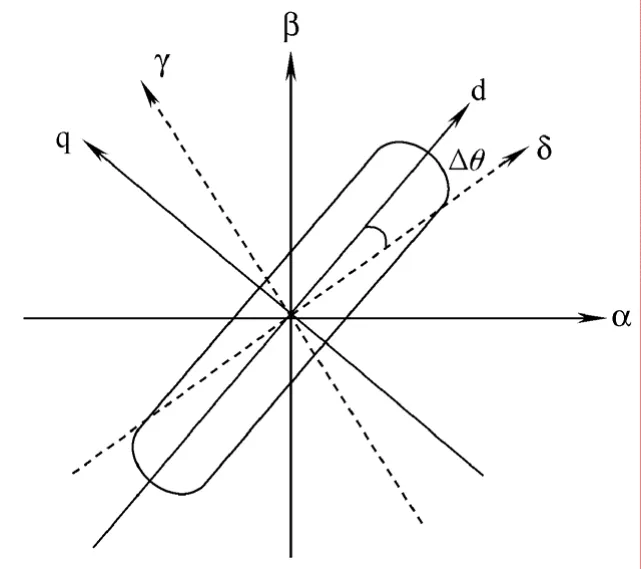
圖1 dq與δγ坐標系Fig.1 dq and δγ reference frame
將上式矢量方程分解到δγ坐標軸上
設其中反電動勢分量為
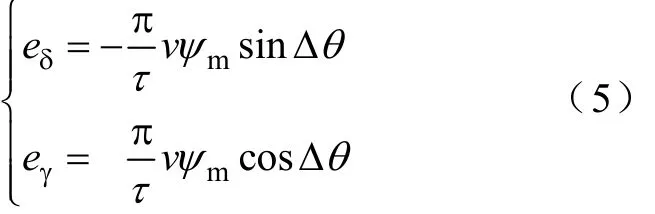
由式(5)可得角度誤差Δθ可以通過eδ和eγ做反三角函數來獲得。式(4)為以電流為狀態變量的線性方程,反電動勢分量在其中作為擾動量。因此可以構造擾動觀測器來估算獲得反電動勢分量。擾動觀測器為
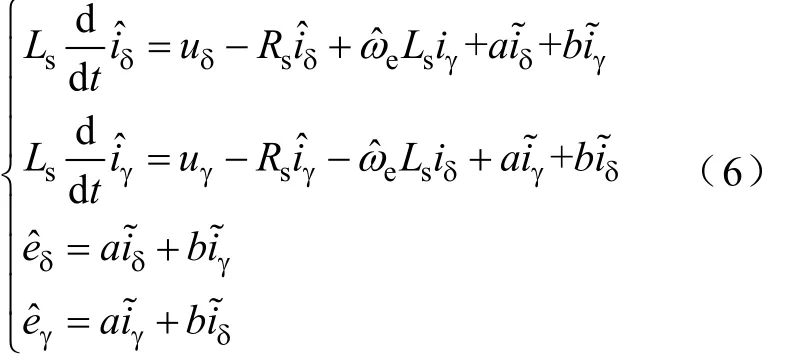
式中,——觀測器輸出;
,——觀測誤差,
a,b——反饋系數。
在得到反電動勢分量后,利用反三角函數計算出角度誤差Δθ為
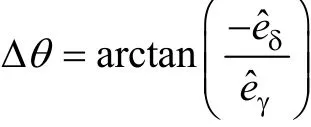
為了使估算得到的坐標與dq坐標系重合,即得到真實的動子位置,必須調節Δθ使其收斂于0,本文采用比例積分(PI)控制器來對Δθ進行控制,控制參考量為0。PI控制器的輸出為估算得到的動子電角速度,通過對電角速度積分得到動子位置的估算值。該位置估算值被反饋給定子電壓電流的坐標變換函數來更新估算的坐標位置信息。整個算法框圖如圖2所示。
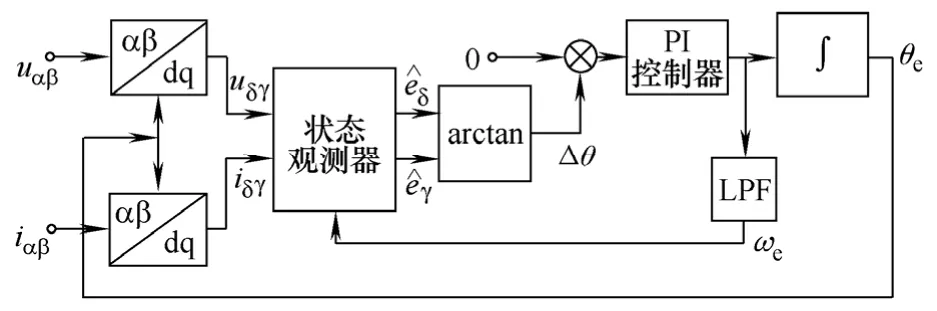
圖2 速度和位置算法框圖Fig.2 Speed and position estimation diagram
4 實驗
4.1 實驗平臺
為了驗證以上算法,利用基于 VME總線的控制系統和一臺長定子同步直線電機搭建實驗平臺。
控制系統采用VMIC公司的VMIVME 7750工控計算機和VxWorks操作系統,動子磁場定向控制與位置和速度估算程序均在IOWorks環境中開發,IOWorks是VMIC公司提供的基于其公司硬件的編程環境,整套開發環境高度集成從而可以大大縮短開發周期。
實驗電機為長定子直線同步電機,動子側采用電勵磁,電機參數如下:定子極距τ:258mm;定子電阻Rs:0.149Ω;定子電感Ls:1.92mH;動子勵磁磁鏈φm:0.495Wb。
由以上參數可得電機動子的直線速度與電角速度之間關系為
實驗中,電機的起步過程采用開環控制,當速度達到一定值后接入觀測器的值構成閉環控制,整個系統的框圖如圖3所示。
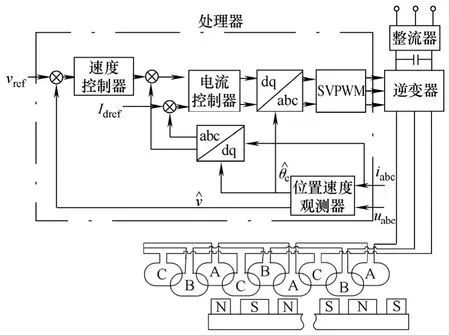
圖3 實驗系統框圖Fig.3 Experimental system overview
4.2 實驗結果
圖4是電機正反向運動過程的速度曲線,速度正向給定最大值為3m/s,電角速度頻率約為6Hz,反向最大為 1.5m/s,電角速度頻率約為 3Hz。從圖中可以看到速度估算效果良好,誤差較小。同時也可以在圖中注意到反向運行起動時刻速度估算誤差有跳變,這是因為本算法不能估算零速時的電機位置,當起動時,位置估算值與實際值相差較大時估算值收斂到實際值的過渡過程會使速度估算產生較大誤差。在起動時采用開環控制可以避免這一問題。
圖5是電機在正向運行時的動子位置波形,包括實際位置和估算值。圖6是圖5的放大圖,從圖中可以看出位置估算效果良好,估算誤差保持在0°附近。
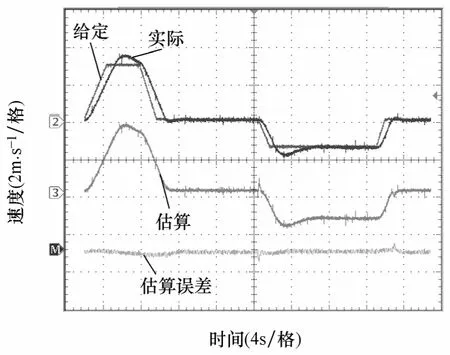
圖4 電機運行的速度曲線Fig.4 Mover speed waveforms
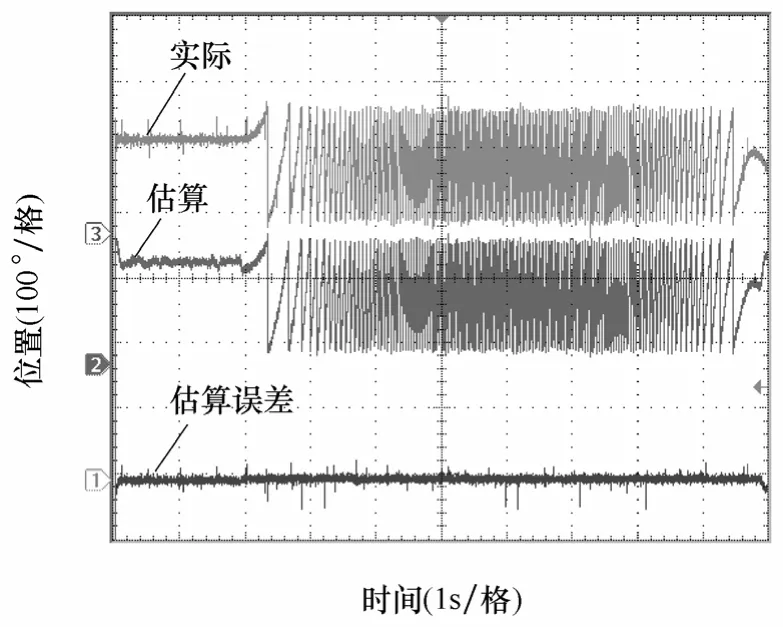
圖5 電機正向運行期間的位置波形Fig.5 Mover position waveforms when moving in positive direction
5 結論
本文針對長定子直線同步電機的矢量控制提出了基于假設坐標系法的速度和位置估算方法,并通過電機試驗平臺驗證。由實驗結果可以看出,本文所采用的速度和位置觀測方法能夠實現對速度和位置很好的估算。
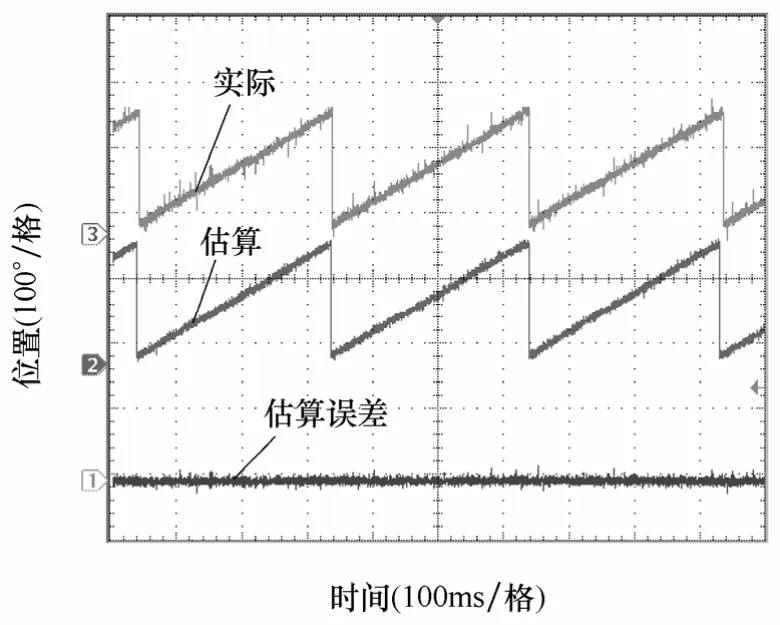
圖6 位置波形放大圖Fig.6 Detailed position waveform
[1] Plattner A. A millimetrewave communication system for maglev application[J]. Microwave Symposium Digest of IEEE MTT-S International, 1994, 2:745-748.
[2] Ng C H, Rashed M, Vas P, et al.A novel MRAS current-based sensorless vector controlled PMLSM drive for low speed operation[C]. Electric Machines and Drives Conference of IEEE International, 2003, 3:1889-1894.
[3] Wang Limei, Guo Qingding.Sensorless control of permanent magnet linear synchronous motor based on nonlinear observer[C]. The 8th IEEE International Workshop on Advanced Motion Control, 2004:619-622.
[4] Kim J H, Choi J W, Sul S K. High precision position control of linear permanent magnet synchronous motor for surface mount device placement system[C] .Proceedings of the Power Conversion Conference,2002, 1: 37-42.
[5] Leidhold R, Mutschler P. Speed sensorless control of a long-stator linear synchronous motor arranged in multiple segments[J]. IEEE Transactions on Industrial Electronics, 2007, 54(6): 3246-3254.
[6] Platen M, Henneberger G. Examination of leakage and end effects in a linear synchronous motor for vertical transportation by means of finite element computation[J]. IEEE Transactions on Magnetics,2001, 37(5): 3640-3643.
[7] Vas P. Electrical machines and drives: a space-vector theory approach[M]. New York: NY, USA: Oxford University Press, 1992.
[8] Mobarakeh B, Meibody Tabar F, Sargos F. A globally converging observer of mechanical variables for sensorless pmsm[C] . 2000 IEEE 31st Annual Power Electronics Specialists Conference, 2000, 2: 885-890.