無軸承開關磁阻電動機懸浮繞組功率變換器的分析與改進
2010-07-25 07:04:42鄧智泉羅建震王曉琳
電工技術學報 2010年2期
楊 鋼 鄧智泉 曹 鑫 羅建震 范 冬 王曉琳
(南京航空航天大學自動化學院航空電源航空科技重點實驗室 南京 210016)
1 引言
無軸承開關磁阻電動機定子具有主繞組和懸浮繞組,可實現驅動和自懸浮功能于一體。其不僅具有開關磁阻電動機結構簡單、工作可靠、控制靈活、容錯能力強等優點,而且還兼有磁懸浮電動機無摩擦、無接觸、無潤滑等一系列優良特性。其應用于五自由度懸浮電動機時可省去一個徑向磁懸浮軸承,因而體積和重量大為減小,軸向長度縮短,使臨界轉速提高,在高速大功率領域有廣闊前景。此外其對轉子徑向位置進行主動控制,對改善因不對稱磁拉力造成的振動和噪聲問題提供了一種新的思路。由于以上諸多優點,使無軸承開關磁阻電動機在航空高速、超高速發動機領域有極大的應用潛力[1-12]。
無軸承開關磁阻電動機功率變換器控制繞組電流,對電動機旋轉和懸浮性能有重要影響。本文以一臺 12/8結構的無軸承開關磁阻電動機為研究對象,推導了懸浮力和轉矩的小信號模型,分析了繞組電流紋波對懸浮力和轉矩的影響。針對懸浮繞組三相半橋功率變換器的不足,提出將懸浮繞組變換器改進為三相四橋臂結構并且采用三態控制模式,然后分析了其各種工作模式和數學模型。最后通過對實驗樣機的調試,給出了實驗結果,驗證了理論分析的正確性。
2 數學模型
無軸承開關磁阻電動機是在普通開關磁阻電動機定子上疊加一套繞組,利用該繞組有目的地改變原電動機氣隙磁場的分布,從而控制作用在轉軸上的麥克斯韋磁力大小和方向實現轉軸懸浮[4-9]。電動機定子的每個凸極上有兩套繞組,一是主繞組Nm,由四個正對凸極上的主繞組串聯而成;二是懸浮繞組,分為α方向懸浮繞組Ns1和β方向懸浮繞組Ns2,分別由各自方向兩個正對凸極上的懸浮繞組串聯而成。
文獻[5-8]推導了無軸承開關磁阻電動機的數學模型,文獻[9]針對此模型的不足,提出了一種改進模型。其基本思路均為:首先得到氣隙磁導,然后推導出用氣隙磁導表示的繞組電感矩陣,再得出磁場儲能的表達式,最后根據機電能量轉換原理得出電動機的數學模型。根據文獻[6-7],懸浮力和轉矩(以A相繞組為例)可表示為
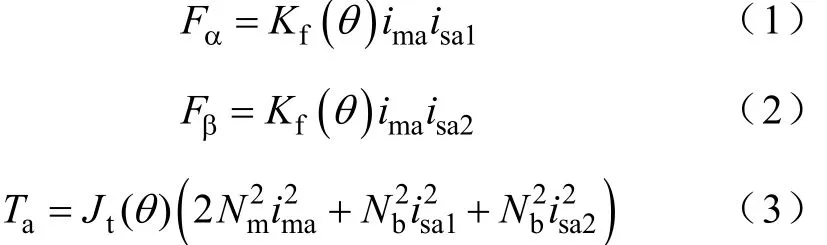
式中Fα,Fβ—— α和β方向懸浮力;
Ta——A相瞬時轉矩;
ima,isa1,isa2——A相主繞組、懸浮繞組電流;
Nm,Nb——主繞組和懸浮繞組匝數;
Kf(θ),Jt(θ)——電動機參數和位置角的函數[6-7];
θ——轉子位置角。
無軸承開關磁阻電動機中定義定轉子齒軸線重合的位置為θ=0°的位置。
根據以上數學模型,確定無軸承開關磁阻電動機轉矩和懸浮力的控制策略為:由位移反饋經 PID調節得到懸浮力;由轉速反饋經PI調節得到轉矩。根據所需懸浮力和轉矩,在轉矩脈動最小原則下確定開通角[9],求得主繞組電流,再由式(1)和式(2)求得懸浮繞組電流。然后通過相應的逆變器去控制繞組實際電流,進而控制所需懸浮力和轉矩。根據文獻[6-8]的分析,本文中主繞組電流采用方波電流控制,懸浮繞組電流按照上述控制策略由DSP控制器計算求得。由于實驗樣機為12/8結構,在盡量減少負轉矩的前提下,最終選擇單拍工作方式,每相導通15°的控制策略。圖1為開通角θon為-7.5°時繞組電感電流示意圖。
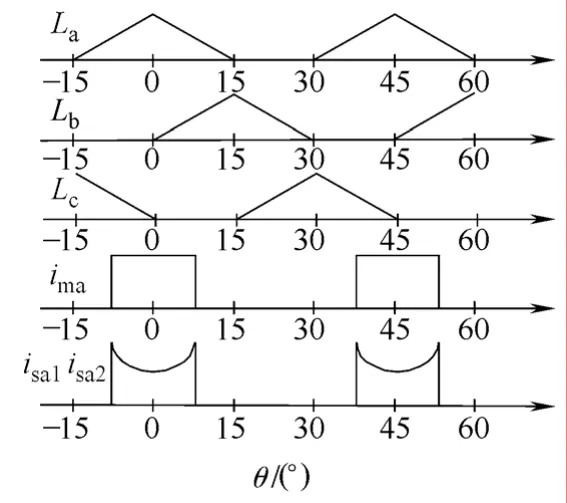
圖1 繞組電感電流示意圖Fig.1 Sketch map of windings inductance and current
3 懸浮繞組功率變換器
無軸承開關磁阻電動機功率變換器分為三部分:主繞組功率變換器和兩套懸浮繞組(α 繞組和β繞組)功率變換器。兩套懸浮繞組功率變換器結構和控制方式相同,控制信號均來自DSP控制器。根據電動機的數學模型和控制策略,主繞組和懸浮繞組功率變換器除滿足一般功率變換器的設計原則之外,還要滿足如下原則:主繞組功率變換器提供的電流大小可控,方向單向;懸浮繞組功率變換器提供的電流大小可控,方向可控。
3.1 三相半橋功率變換器
根據以上原則和文獻[15]的分析,確定主繞組功率變換器采用控制最為簡單的不對稱半橋變換器,其工作模式和特點在多篇文獻中已經論述過[11]。懸浮繞組功率變換器采用三相半橋式結構。由于電動機采用單相導通策略和三相半橋式變換器的拓撲結構,懸浮繞組功率變換器有兩種工作模態,下面以α 懸浮繞組功率變換器A相為例進行說明。
(1)+1態。此時繞組端電壓為母線電壓的一半,繞組電流增加,電源向繞組提供能量。繞組通正向電流時閉合VT11,通反向電流時閉合VT12,如圖2所示。電路方程為
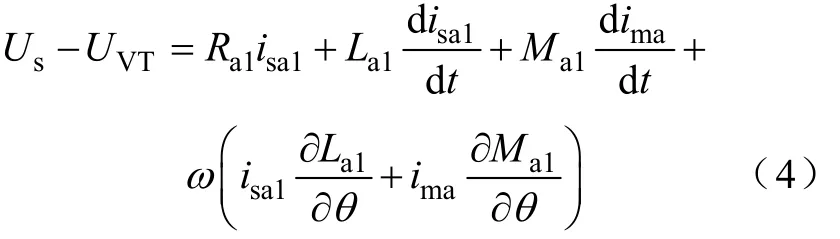
式中,Us為母線電壓的 1/2;UVT為開關管壓降;Ra1為A相α懸浮繞組電阻;La1為A相α懸浮繞組自感;Ma1為 A相主繞組和α懸浮繞組間的互感[5-9];ω為電動機轉速。
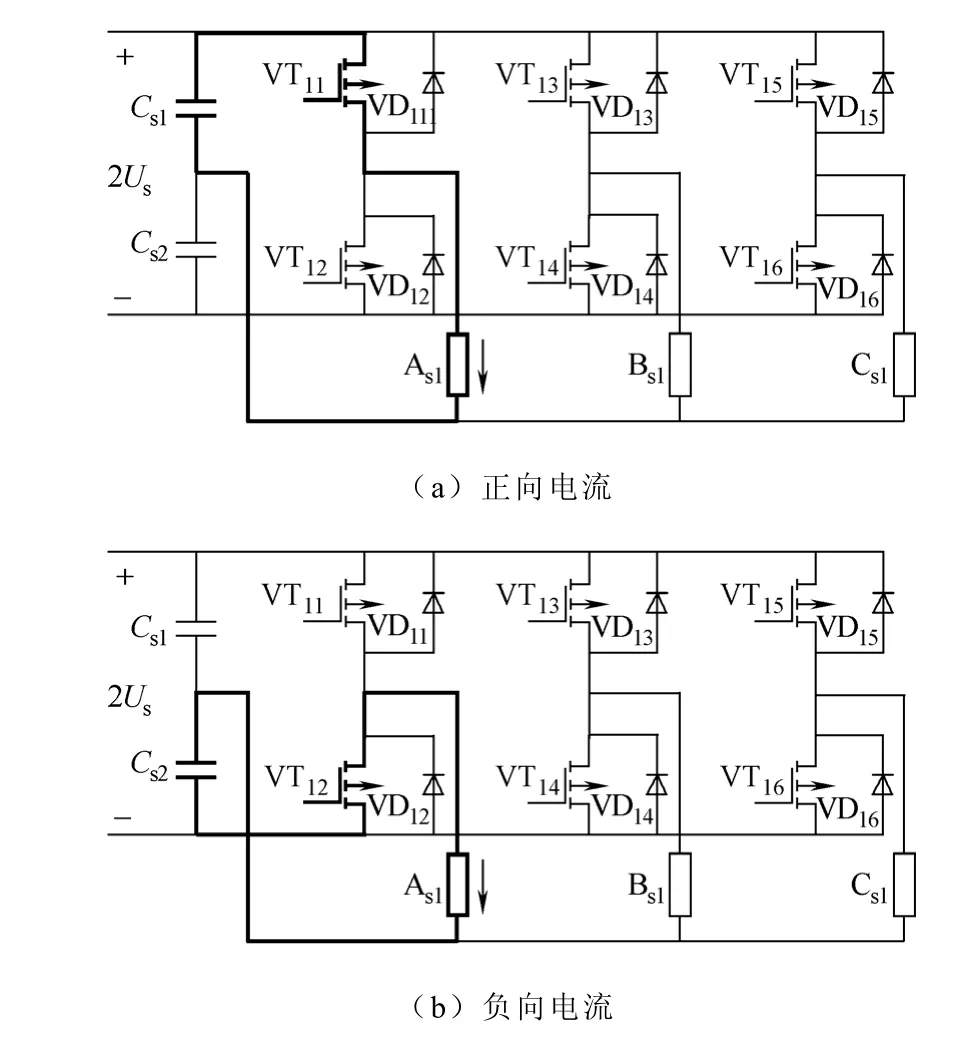
圖2 三相半橋功率變換器模態1Fig.2 Mode 1 of three-phase half bridge power converter
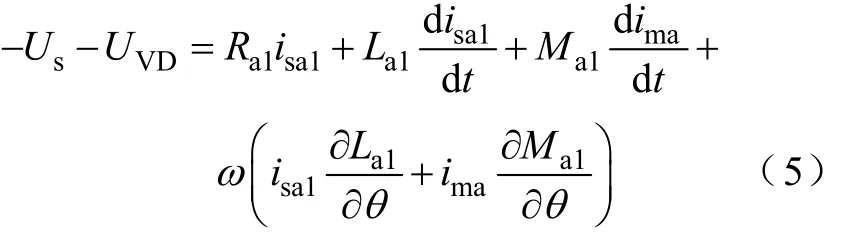
(2)-1態。此時繞組電壓為負的母線電壓一半,繞組電流減小,處于續流狀態,向電容回饋能量。繞組為正向電流時,續流經VD12;反向電流時,續流經VD11,如圖3所示。電路方程見式(5),UVD為續流二極管壓降。
三相半橋式功率變換器所用開關器件最少,一般情況下均能正常工作,但其仍存在兩個問題:中點電壓漂移和電流紋波較大。
懸浮繞組功率變換器有兩個分裂電容,其在工作過程中由于負載的不對稱性,會帶來中點電壓漂移的問題。負載的不對稱性是與轉子所受外力有關,非人為控制。當系統要求各懸浮繞組一直保持固定方向的電流(如負向電流總是保持下管閉合)時,其總是由一個電容供給能量(Cs2),另外一個電容(Cs1)吸收回饋能量,會造成中點電壓漂移較大,嚴重時使系統無法穩定工作。
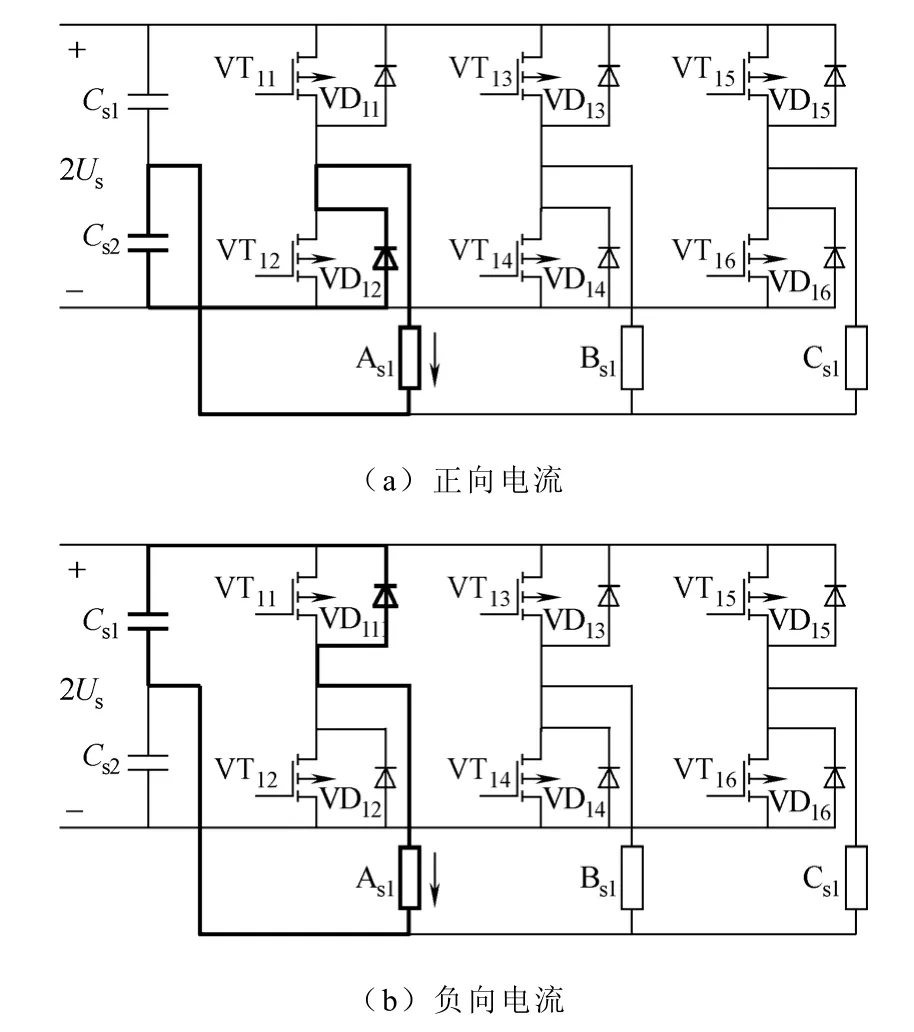
圖3 三相半橋功率變換器模態2Fig.3 Mode 2 of three-phase half bridge power converter
此外三相半橋變換器只能采用兩態控制方式,無法實現三態控制,繞組兩端電壓為母線電壓一半,電流變化率大,在相同的開關頻率下電流紋波較大。而電流紋波的大小會給系統帶來一定的影響,一是電流的振蕩會在電動機系統中帶來額外的鐵耗和銅耗,二是電流的振蕩會引起懸浮力和轉矩的振蕩,繼而會影響轉子位移振蕩,這需要通過轉矩和懸浮力關于電流的小信號模型看出。
3.2 電動機轉矩和懸浮力的小信號模型
從以上無軸承開關磁阻電動機的數學模型可以看出,懸浮力和轉矩主要與電動機旋轉位置角和繞組電流有關。電流的控制精度決定了轉矩和懸浮力的控制精度,因此電流紋波的大小對懸浮力和轉矩的控制精度有重要影響,所以有必要推導出電動機轉矩和懸浮力關于電流信號的小信號模型。
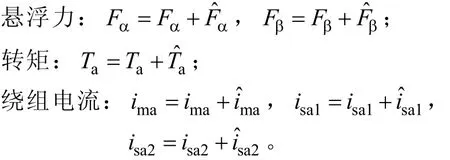
將以上各量代入式(1)~式(3)可得
由式(4)~式(6)和式(1)~式(3)比較可得轉矩和懸浮力的小信號模型為
由式(9)~式(11)可見,電流紋波對轉矩和懸浮力的控制有較大的影響。因此減小電流紋波對無軸承開關磁阻電動機的穩定運行具有重要意義。而在三相半橋功率變換器工作期間,繞組兩端電壓始終為母線電壓的 1/2,電流變化率大,使得相同開關頻率下電流紋波相比三態控制時較大。
3.3 三相四橋臂功率變換器
以上三相半橋功率變換器實際運行中的不足,是由變換器電路拓撲和電動機本身控制特點引起的。針對此不足,本文將兩個分裂電容用兩個開關管替代,即在懸浮繞組功率變換器中采用三相四橋臂拓撲結構。雖然比半橋式變換器增加了兩個開關器件,成本有一定上升,但此結構可帶來以下優點:
(1)提高了電壓利用率。開關管閉合時繞組端電壓為母線電壓,與原來三相半橋變換器相比提高了一倍。
(2)消除了中點電壓漂移問題。在本系統中,電動機采用單相導通策略,所以繞組通電時相當于一個單相全橋變換器在工作,不論繞組電流正負和大小,都不存在中點電壓漂移問題。而在原來三相半橋變換器中,由于外力不受控制,導致兩個電容負載不一樣,兩個電容間中點電壓出現偏差。
(3)降低了電流紋波。在三相半橋變換器中,電路結構決定了繞組端電壓為正負母線電壓的1/2,只能采用兩態控制方式,電流變化率大。而在三相四橋臂變換器中,由于兩個分裂電容用開關管替代,控制方式更加靈活,在兩態控制基礎上,加入零態控制,形成三態控制。由于在零態時,繞組端電壓為零,因此電流的變化率相對于±1態要小。因此在相同的開關頻率下,采用三態控制方式的三相四橋臂變換器電流紋波要比三相半橋變換器小,更有利于懸浮力和轉矩的控制。
此外由于只有一個濾波電容,因此電容的充放電損耗也相應降低。當無軸承開關磁阻電動機工作在單相導通方式時,三相四橋臂變換器有以下三種工作模式。
(1)+1態。此時繞組端電壓為母線電壓Us,繞組電流增加,電源向繞組提供能量。繞組通正向電流時閉合 VT3、VT2;通負向電流時閉合 VT1、VT4,如圖4所示。電路方程為
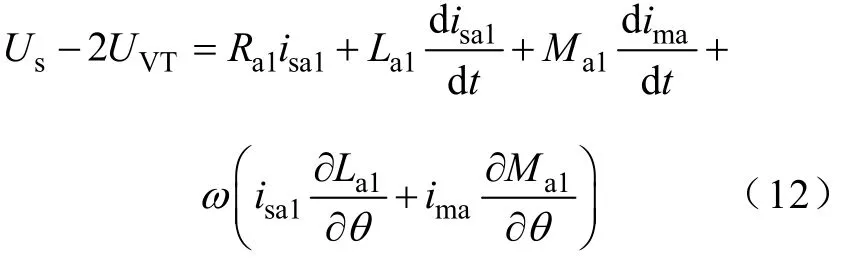
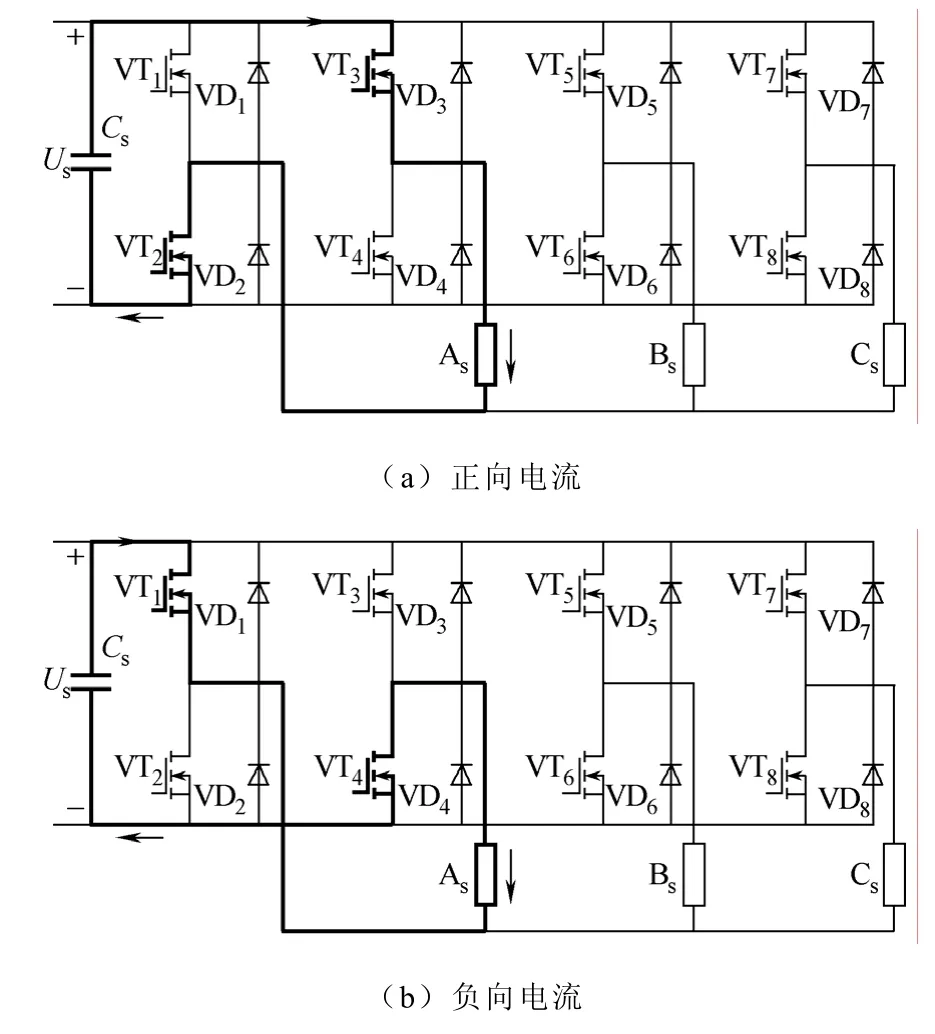
圖4 三相四橋臂功率變換器模態1Fig.4 Mode 1 of three-phase four-leg power converter
(2)-1態。此時繞組電壓為-Us,繞組電流減小,處于續流狀態,向電容回饋能量。繞組為正向電流時,經 VD1、Cs、VD4構成回路;為負向電流時,經 VD3、Cs、VD2構成回路,如圖 5所示。電路方程為
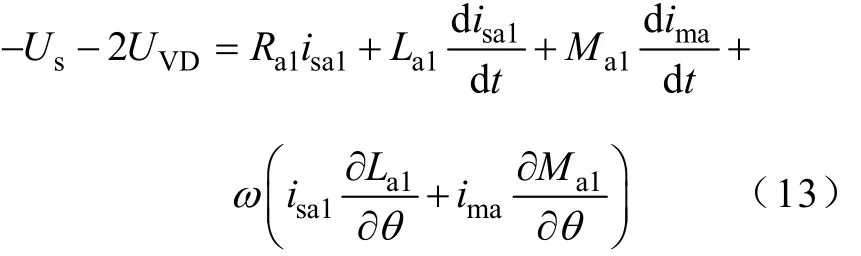
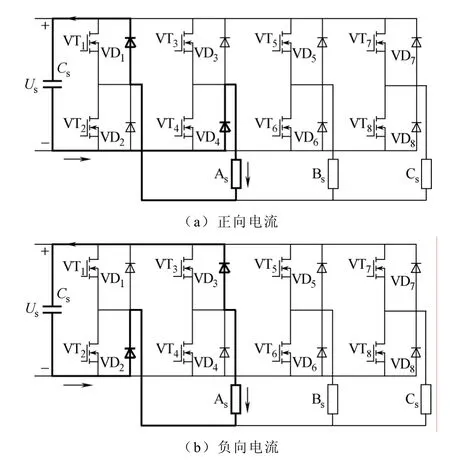
圖5 三相四橋臂功率變換器模態2Fig.5 Mode 2 of three-phase four-leg power converter
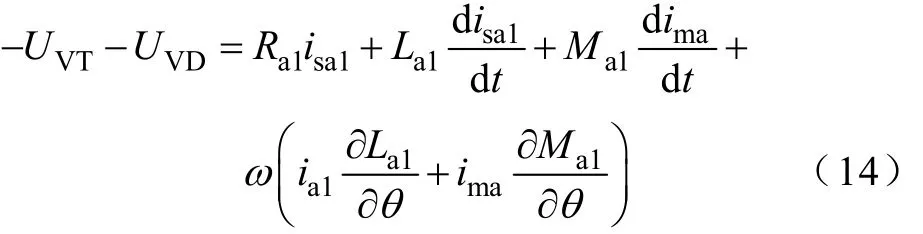
(3)0態。此時繞組處于自然續流狀態,端電壓近似為0V。正向電流時,VT3(或VT2)單獨開通,繞組電流經 VT3(或 VT2)和 VD1(或 VD4)構成回路;負向電流時,VT1(或VT4)單獨開通,繞組電流經 VT1(或 VT4)和 VD3(或 VD2)構成回路,如圖6所示。電路方程見式(14)。
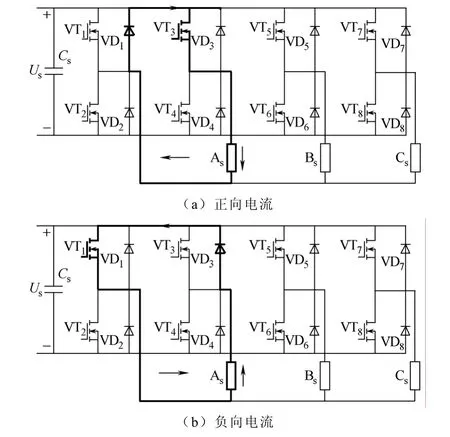
圖6 三相四橋臂功率變換器模態3Fig.6 Mode 3 of three-phase four-leg power converter
4 兩種變換器電流控制分析
電流跟蹤控制方式有多種,如滯環控制、PWM控制、采樣保持控制等[11-15]。如圖1所示,由于在無軸承開關磁阻電動機中,懸浮繞組電流波形不同于異步機或同步機的正弦波形,所以采用滯環控制。
模擬滯環實現簡單,但開關頻率難以控制,且不適合于數字化以及更多控制算法的實現。由于無軸承開關磁阻電動機控制系統的核心為DSP2812,其自身帶有高速的A/D轉換口,所以本文電流跟蹤控制采用數字滯環。數字滯環中開關管的開關頻率不大于系統電流采樣頻率。根據以上分析,三相半橋功率變換器只能采用兩態數字滯環控制方式,三相四橋臂功率變換器可采用三態數字滯環控制方式。為便于比較,以下分析中作如下假設:所有開關管和續流二極管均為理想器件;電源電壓為恒定值;不考慮換相過程;電流滯環環寬遠小于電流平均值;三相四橋臂變換器母線電壓值為三相半橋變換器母線電壓值的1/2。
在數字滯環控制方式下,設電流的給定控制環寬為 2Δi0,給定電流的平均值為i0,i′為三相半橋變換器電流,i為三相四橋臂變換器電流。設懸浮繞組變換器工作模式為+1態時,電流的變化率為k1;0態時電流的變換率為k0;-1態時電流的變換率為k2,數字系統控制周期(即采樣頻率)為T。下面以A相通正向電流為例分析兩種變換器的電流控制。圖7為兩種功率變換器在數字滯環控制方式下的電流示意圖。Uas為繞組電壓。
如圖7a所示,三相半橋變換器在兩態控制方式下,每個采樣時刻采樣電流為i′,如果滿足i′>i0+Δi0(t3時刻),則工作回路中的開關管(VT11)關斷,變換器工作在-1態模式,電流下降;如果i′<i0-Δi0(t1時刻),則開關管閉合,變換器工作在+1 態模式,電流上升;如果i0-Δi0≤i′≤i0+Δi0(t2時刻),則開關管不動作,保持原來狀態。
如圖7b所示,當三相四橋臂變換器在三態控制方式下,采樣得到繞組電流i滿足i≥i0+Δi0時(t2時刻),工作回路中的兩個開關管(VT2、VT3)關斷,繞組端電壓為負母線電壓,變換器工作在-1態模式;當i≤i0-Δi0時(t5時刻),兩個開關管閉合,繞組端電壓為正母線電壓,變換器工作在+1態模式;但當采樣電流i滿足i0-Δi0<i<i0+Δi0時(t3時刻),此時回路中兩個開關管只保持一個開通(VT3或VT2),另外一個(VT2或VT3)關斷,此時繞組端電壓為零,變換器工作在0態模式,繞組處于自然續流狀態。
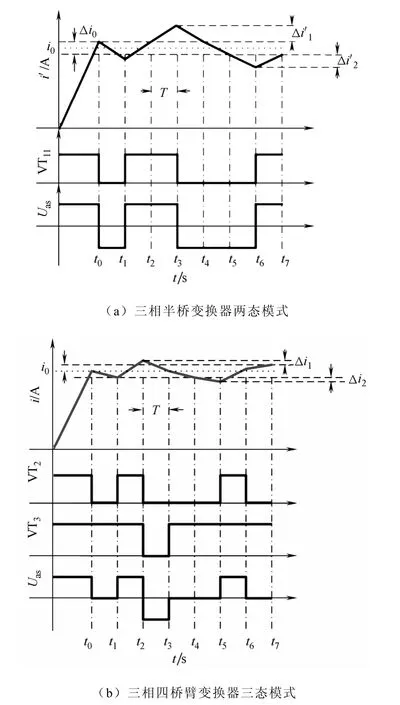
圖7 數字滯環電流示意圖Fig.7 The sketch of digital hysteresis loop current
在數字滯環控制方式下,控制器按控制頻率采樣電流經A/D轉換后,與程序設定的環寬進行比較,輸出開關管開關信號。由于數字控制方式是將連續信號離散,采樣得到離散信號進行控制,有一定的滯后,因此實際電流的環寬要比程序設定的環寬大。兩態控制模式和三態控制模式的實際電流環寬有所不同。

如圖 7b所示,在三態控制方式下,設變換器t1時刻采樣得到的電流為i=i0-Δi0,兩開關管閉合(VT3、VT2),電流上升,則在t2時刻電流上升值為 2Δi0+Δi1=k1T;t4時刻采樣得到電流i,近似為i0-Δi0,但比其略大,兩開關管一個保持閉合(VT3),一個關斷(VT2),電流下降,則t5時刻電流下降值為Δi2=k0T。所以在三態控制方式下,三相四橋臂變換器電流環的最大環寬為

將兩種變換器實際電流環寬比較,得

假設開關器件為理想器件,由式(6)~式(7)和式(12)~式(14)得各種控制模態下電流變換率為

在相同的條件下,比較式(19)和式(20),易知k2>k0,即0態時的繞組電流變化率要小于-1態時的電流變化率。由上面分析和式(17),可知三態控制方式下電流的實際環寬要小于兩態控制下電流的實際環寬。即三相半橋功率變換器的電流環寬要大于三相四橋臂功率變換器電流環寬。所以采用三相四橋臂功率變換器后,電流紋波降低。根據以上小信號模型分析可知,此時轉矩和懸浮力的脈動減小,更有利于電動機的穩定控制。
5 實驗結果與分析
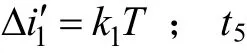
根據以上分析,本文設計了無軸承開關磁阻電動機功率變換器,并在實驗樣機上進行了調試,圖8為電動機樣機,參數為定子鐵心外徑120mm,定子軛高5.75mm,定子極高24mm,轉子外徑60mm,轉子軛高10mm,轉子極高5mm,轉軸直徑30mm,軸向長度 75mm,定、轉子極弧 15°,平均氣隙長度0.25mm。主繞組:4極串聯,14匝;懸浮繞組:2極串聯,17匝。功率變換器開關管采用功率場效應管(MOSFET)。位移傳感器采用電渦流傳感器,其精度為18V/mm。
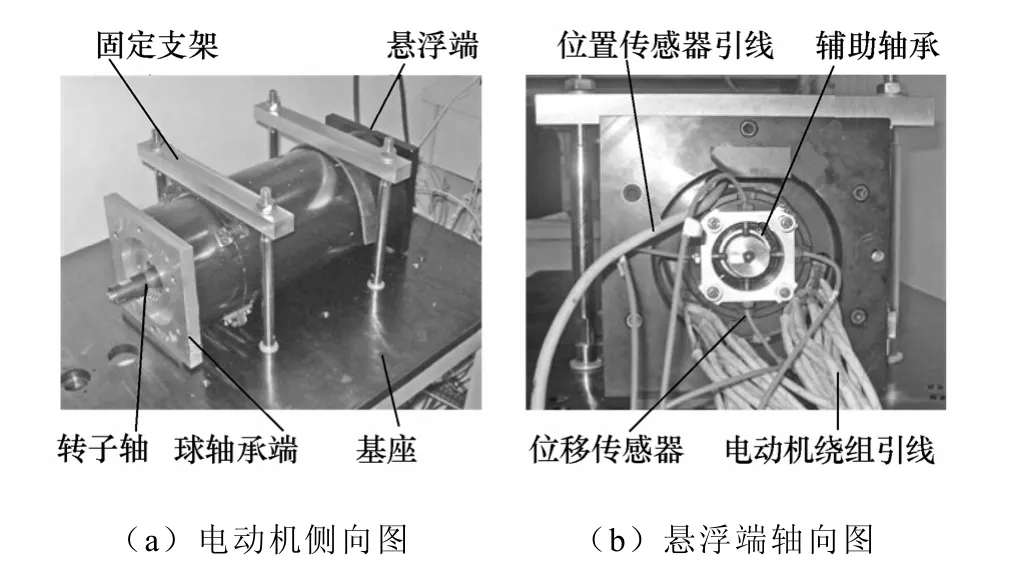
圖8 電動機外觀圖Fig.8 Photograph of the motor
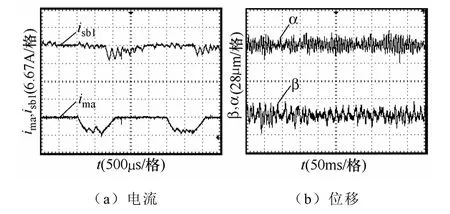
圖9 三相半橋變換器實驗波形Fig.9 Experimental waveforms of a three-phase half-bridge power converter
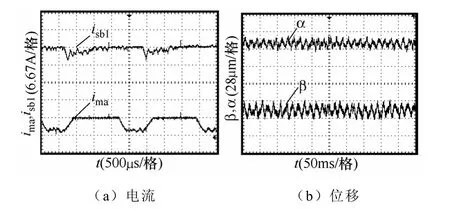
圖10 三相四橋臂變換器實驗波形Fig.10 Experimental waveforms of a three-phase four-leg power converter
圖9是懸浮繞組功率變換器為三相半橋變換器時實驗所得的電流波形和電動機轉子位移波形。圖10是懸浮繞組功率變換器為三相四橋臂變換器時實驗所得的電流波形和電動機轉子位移波形。為比較兩種變換器對電動機懸浮性能的影響,兩組實驗外部電路參數相同,電動機控制參數相同,主繞組電流均為5A。由于轉子重力的原因,相當于在電動機徑向上施加了一個方向豎直向下,大小為50N的徑向負載。
從圖9和圖10可以看出,兩種變換器均能使電動機轉子懸浮,但三相半橋變換器的電流脈動要比三相四橋臂變換器的大。采用三相半橋變換器時,實驗測得的轉子在α 和β方向上的位移波動范圍均為880mV,約為50μm。采用三相四橋臂變換器時,實驗測得的轉子在α 和β方向上的位移波動范圍分別為 460mV和560mV,約為26μm和 31μm。從以上對比實驗可以看出,相對于三相半橋變換器而言,當懸浮繞組功率變換器電路拓撲采用三相四橋臂,電流控制采用三態控制時,繞組電流紋波有一定降低,轉子位移波動范圍變小,從而更有利于無軸承開關磁阻電動機對轉子的穩定控制。
6 結論
本文針對三相半橋功率變換器的不足,提出用三相四橋臂變換器代替三相半橋變換器。這不僅消除了因半橋式變換器中點電壓漂移對電動機控制帶來的不利影響,而且在三相四橋臂變換器中,采用三態數字滯環控制方式,有效地降低了繞組電流紋波。實驗結果證明懸浮繞組采用三相四橋臂變換器后,轉子位移脈動減小,更有利于無軸承開關磁阻電動機的穩定控制。
[1] 鄧智泉,嚴仰光.無軸承交流電機的基本理論和研究現狀[J].電工技術學報,2000,15(2):29-35.
Deng Zhiquan, Yan Yangguang. The main theory and status quo of AC bearingless motors[J]. Transactions of China Electrotechnical Society, 2000, 15(2): 29-35.
[2] Bosch R. Development of a bearingless electric motor[C]. Proc. Int. Conf. Electric Machines(ICEM’88), Pisa(Italy), 1988: 373-375.
[3] Bichsel J.The bearingless electrical machine[C]. Proc.Int. Symp. Magnetic Suspension Technology NASA Langley Res. Center, Hampton, 1991: 561-573.
[4] 張媛,鄧智泉.無軸承開關磁阻電機控制系統的設計與實現[J]. 航空學報,2006,27(1):77-81.
Zhang Yuan, Deng Zhiquan. Design and realization of bearingless switched reluctance motor control system[J]. Acta Aeronautica Et Astronautica Sinica,2006, 27(1): 77-81.
[5] Takemoto M,Shimada K,Chiba A,et al.A design and characteristics of switched reluctance type bearingless motors[C]. Proc. NASA/CP- 1998-207654,Gifu, Japan, 1998: 49-63.
[6] Takemoto M, Chiba A, Fukao T.A method of determining advanced angle of square-wave currents in a bearingless switched motor[J].IEEE Trans. on Industry Application, 2001, 37(6):1702-1709.
[7] Takemoto M, Chiba A, Fukao T.A new control method of bearingless switched reluctance motors using square-wave currents[C]. Proceedings of the 2000 IEEE Power Engineering Society Winter Meeting. Singapore, 2000: 375-380.
[8] Takemoto M, Suzuki H, Chiba A, et al.Improved analysis of a bearingless switched reluctance motor[J].IEEE Trans. on Industry Application, 2001, 37(1):26-34.
[9] 鄧智泉,楊鋼,張媛,等.一種新型的無軸承開關磁阻電機數學模型[J]. 中國電機工程學報,2005,25(9):139-146.
Deng Zhiquan, Yang Gang, Zhang Yuan, et al. An innovative mathematical model for a bearingless switched reluctance motor[J]. Proceedings of the CSEE, 2005, 25(9): 139-146.
[10] Sun Jianbo, Zhan Qionghua, Liu Liming. Modelling and control of bearingless switched reluctance motor based on artificial neural network[C]. IEEE IECON 2005, 2005: 1638-1643.
[11] Barnes M, Pollock C. Power electronic converters for switched reluctance drives[J]. IEEE Trans. on Power Electronics, 1998, 13(6): 1100-1111.
[12] Frede Blaabjerg, Philip C Kjaer, et al. Improved digital current control methods in switched reluctance motor drives[J]. IEEE Trans. on Power Electronics,1999, 14(3): 563-572.
[13] 陳昊,謝桂林.開關磁阻調速電動機的功率變換器設計[J].中國礦業大學學報,1998,27(2):158-161.
Chen Hao, Xie Guilin. Design of power converter for switched reluctance motor drives[J]. Journal of China University of Mining & Technology, 1998, 27(2):158-161.
[14] 阮新波,嚴仰光. 四橋臂三相逆變器的控制策略[J].電工技術學報,2000,15(1):61-64.
Ruan Xinbo, Yan Yangguang. The control strategy for three-phase inverter with four bridge legs[J].Transactions of China Electrotechnical Society, 2000,15(1): 61-64.
[15] 楊鋼.無軸承開關磁阻電機實驗平臺的開發與研制[D].南京:南京航空航天大學,2003.