基于虛擬現實的機器人晃動軌跡的仿真
2011-02-01 01:39:20張克敏梁錫昌
中國機械工程 2011年4期
關鍵詞:模型
張克敏 梁錫昌
1.重慶大學機械傳動國家重點實驗室,重慶,400030 2.九州大學,福岡,日本,819-0395
基于虛擬現實的機器人晃動軌跡的仿真
張克敏1,2梁錫昌1
1.重慶大學機械傳動國家重點實驗室,重慶,400030 2.九州大學,福岡,日本,819-0395
為開發基于虛擬現實的機器人臨場感仿真實驗平臺,提出了一種通過單自由度小阻尼自由振動模型來實現機器人末端在虛擬場景中的晃動軌跡的仿真方法。以三自由度機器人為具體實例詳細分析了該方法,得出了實現VS編程仿真的離散型關節軌跡方程,并據此開發出了三自由度機器人臨場感仿真平臺中的相應程序,進行了仿真實驗,仿真結果表明該方法有效。
虛擬現實;機器人;晃動軌跡;仿真
0 引言
隨著計算機軟硬件技術的飛速發展,虛擬現實技術取得了卓越成就,并被廣泛應用于實際系統中[1]。基于虛擬現實技術開發的機器人臨場感仿真平臺就是最好的應用實例,因為其仿真過程直觀方便、真實感強,給科研工作者的研究工作提供了諸多幫助,因此將虛擬現實技術和機器人技術有機地結合起來研究設計機器人是當前的研究熱點之一[2-4]。對于機器人來說,軌跡的仿真十分重要,它不僅可以檢查出機器人運動學正逆解的正確性,還可以方便地規劃出最優路徑,為此,很多科研工作者進行了大量的研究并取得了一定的成果[5-7],但是研究成果大都集中在機器人“加速-勻速-減速”模式下正常運動時的軌跡規劃和仿真。而當機器人以一定速度運動到某位置突然需要停在此位置上時,根據常識可知,機器人末端會在空中晃動一段時間后停于該位置,對這一過程的仿真,不管是用于教學演示,還是對安全控制系統的開發都有重要意義,而且對于開發一個完整的機器人臨場感仿真平臺來說,晃動軌跡的仿真也是不可缺少的重要組成部分,因為它極大地增強了仿真過程的沉浸感、逼真感,但是現有的研究成果很少涉及這一方面。本文在原有研究的基礎上提出了一種利用單自由度系統的小阻尼自由振動模型來實現機器人末端在虛擬場景中晃動軌跡的仿真,并以三自由度機器人為具體實例詳細分析了該仿真方法,計算出了離散型關節軌跡方程,并在其臨場感仿真平臺中得到了應用。
1 晃動軌跡的仿真方法及仿真模型
機器人臨場感仿真就是基于虛擬現實技術開發機器人仿真平臺,在此平臺上,操作者能通過三維交互設備將人手的運動數據映射到虛擬場景中,并對虛擬機器人進行模擬操作,同時虛擬場景和機器人反饋數據給三維交互設備,產生實時的視覺、力覺、運動覺和聽覺沖擊,使操作者有種“身臨其境”的感覺。對本文提出的晃動軌跡仿真模型主要體現在視覺上。
為了實現在操作空間中對機器人晃動軌跡的仿真,提出精確的晃動軌跡仿真模型是很困難的,所以有必要對模型作合理的假設、簡化。首先將n自由度虛擬機器人末端點分成兩質點,分別為質點P1和虛質點P2,如圖1a所示,它們之間采用一根伸長長度為零的彈簧相連接,再將機器人的分布質量按照靜力等效原則集中到P1點,P2的質量為零,求解虛擬機器人的正逆運動學方程。當虛擬機器人正常運動時,P1和P2完全重合,當虛擬機器人以某一速度運動到某位置突然需要停在此位置上時,P1和P2將分離開來,P2固定在停下時的位置,P1在停下時的速度方向上做單自由度系統的小阻尼自由振動,其位置變化如圖1b所示,最后,通過逆向運動學方程進行軌跡變換,可方便地求出關節軌跡方程,然后進行可視化編程仿真。根據程序設計和圖形動畫處理原理,仿真過程中的實時采樣頻率至少為24Hz[8-11]。每采樣一次,該程序將運行一次,整個晃動軌跡的臨場感仿真是一個復雜的實時計算過程。
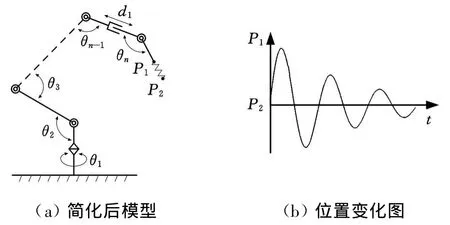
圖1 仿真原理
2 實例分析
求解機器人運動學方程的逆解過程是復雜的,而且逆解往往是不唯一的。下面以虛擬三自由度機器人為例進一步研究晃動軌跡的仿真方法和仿真模型。
2.1 正逆運動學方程
機器人運動學是專門研究物體運動規律的,但在研究中不考慮產生運動的力和力矩,它涉及運動物體的位置、速度和加速度,是軌跡仿真的基礎[12-13]。機器人的末端在操作空間中晃動,但是在仿真過程中,計算機在關節空間中給定關節角度的值更為方便,所以可先在操作空間中計算分析軌跡、運動方向和速度,再經過軌跡變換將其轉換為關節軌跡進行仿真。
如圖2所示,虛擬三自由度機器人的三個關節角分別為 θ1、θ2和 θ3,對應的連桿長度分別為l1、l2和l3,為了求解方便,增加一個虛轉動關節θ4,用D-H 方法建立桿坐標系,經綜合考慮,將機座坐標系確定為基礎坐標系,P1為虛擬三自由度機器人末端點,P2為實現晃動軌跡臨場感仿真而增加的虛質點,且質量為零,P1和P2之間用一根伸長長度為零的彈簧相連接。
由圖1易求得虛擬三自由度機器人運動學方程:
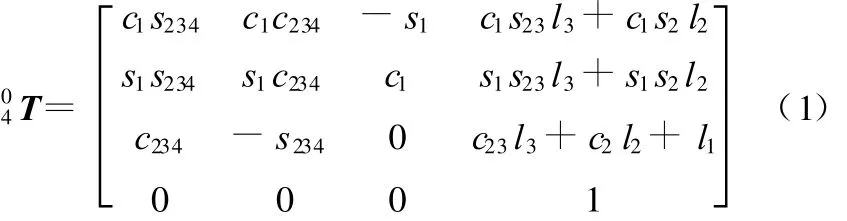
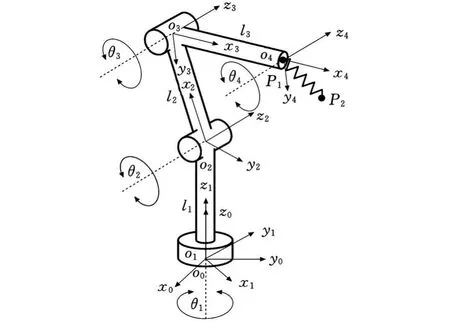
圖2 仿真原理及桿坐標系
在式(1)運動學方程中θ4為任意角度。
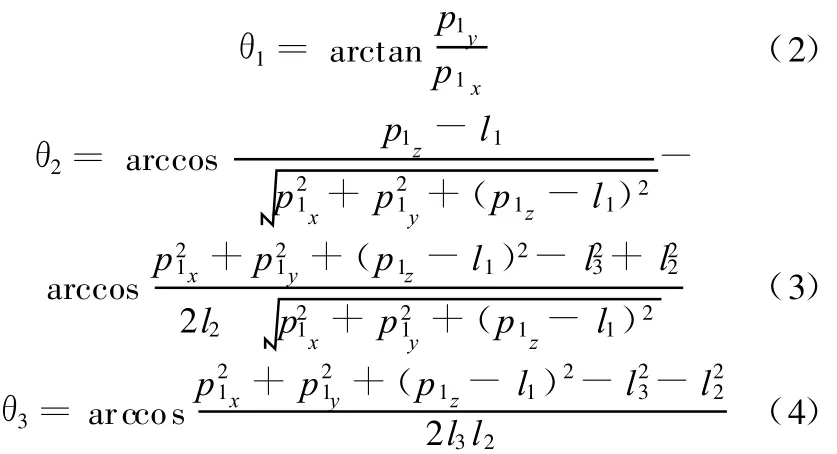
假定 P1點在基礎坐標系下的位置坐標為(p1x,p1y,p1z),通過式(1)和關節角的轉動范圍可求出虛擬三自由度機器人的運動學逆解:
2.2 晃動軌跡離散化
虛擬三自由度機器人實現晃動軌跡的過程實際上是實現軌跡離散化的過程,沿軌跡運動的點的速度體現在這些離散點之間的間隔上。
如圖3所示,在操作空間中,假設虛擬三自由度機器人沿著期望軌跡從起始位置S經路徑點P0運動到終止位置G。在正常運動情況下(圖2),彈簧伸長長度為零,P1與P2完全重合為一體,P2質量為零,位移均為p1(t)。
當機器人以一定速度運動到P0位置時,由于某種原因機器人突然需要在此位置上停止,停止時的速度為p?1(t),加速度為p¨1(t),則虛擬三自由度機器人末端將在虛擬場景中晃動,此時,P1與P2才分離開來,P2固定在停下時的P0位置,將機器人的分布質量按照靜力等效原則集中到機器人末端 P1,假定集中質量為M,經過合理的假設和簡化,建立的彈簧-質量-阻尼模型如圖4所示。將仿真模型合理簡化為單自由度系統的小阻尼自由振動模型,其中,彈簧剛度系數為k,阻尼系數為c,M的位移為 p1(t),方向為停下時的速度方向。
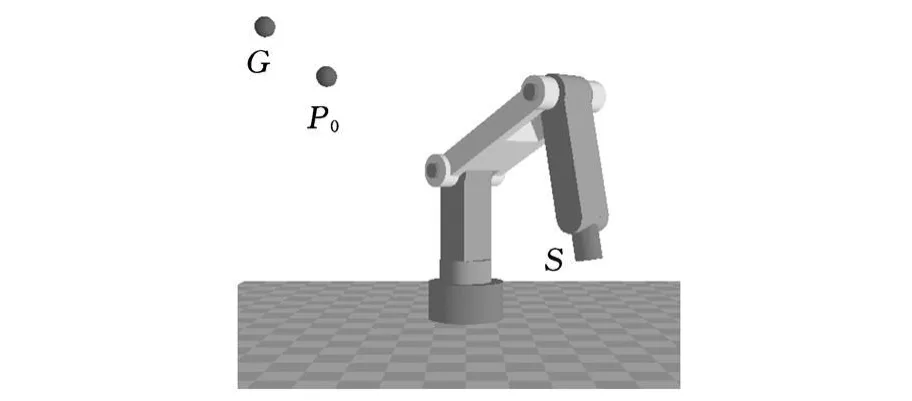
圖3 運動路徑點圖
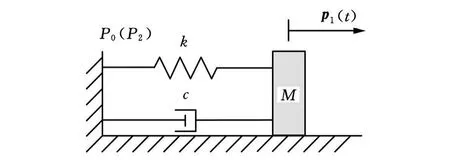
圖4 彈簧-質量-阻尼模型
基于牛頓第二定律的動靜法建立仿真模型系統微分方程如下:
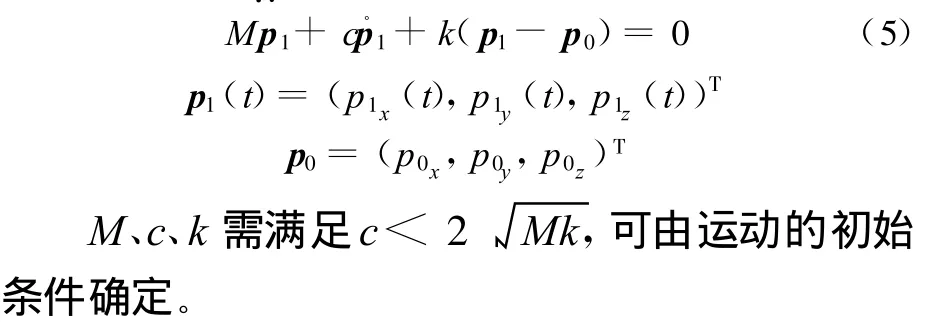
計算機在臨場感仿真過程中,不能直接執行連續函數,為了實現VS編程仿真,必須將式(5)離散化,并求出相鄰時刻間的位移遞推方程。
設ti-1為某一時刻,ti為下一相鄰時刻,d t(經驗值為1m s)為采樣周期。則
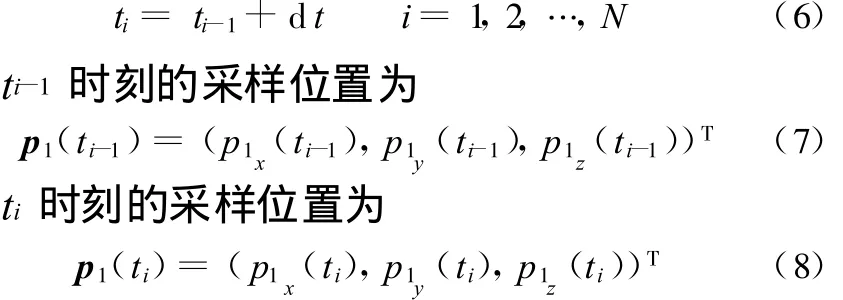
則,在 ti時刻式(5)可離散化為
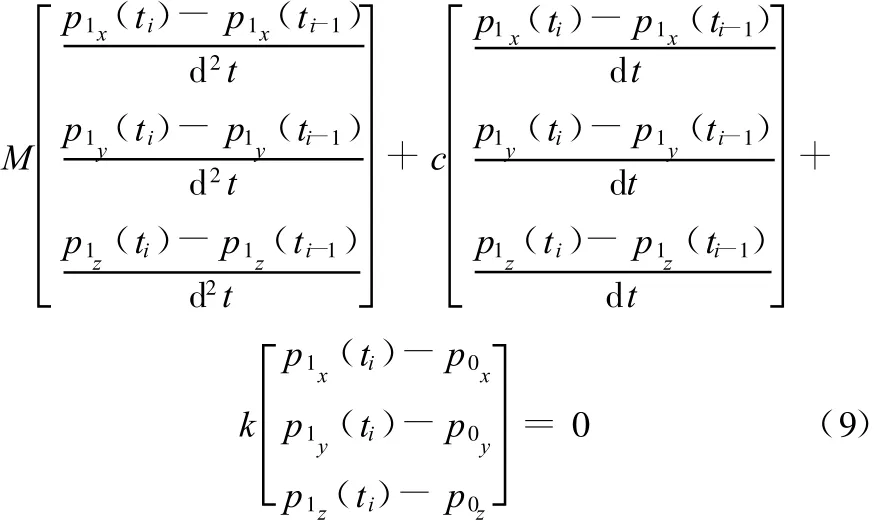
則,M在ti時刻生成的離散型遞推直角坐標軌跡方程為
將式(10)代入式(2)~式(4)得虛擬三自由度機器人在ti時刻由直角坐標軌跡方程變換得到的關節軌跡方程為

2.3 仿真實驗
仿真實驗系統如圖5所示,該系統主要有硬件系統和軟件系統組成,其中硬件系統主要由計算機、三維交互設備Falcon構成。所用計算機采用W indow s XP操作系統,CPU為Intel酷睿2雙核、2.40GHz,內存為 2G,顯卡為 NV IDIA Quad ro NVS 135M。軟件系統是在計算機上依據仿真模型開發出相應的仿真軟件,該軟件采用W indow s XP操作系統、Visual Studio 2008應用程序開發環境、OpenGL圖形庫和Falcon數據庫(Falcon的精度已達到科研要求[14]),結合MFC類庫開發,通過Falcon實現人機交互,進而實現動信息的相互映射。虛擬三自由度機器人的運動信息由計算機和Falcon實時給定和采樣計算,晃動軌跡的視覺臨場感仿真效果主要體現在仿真模型的有效性上,實驗內容為讓操作者通過Falcon去操作虛擬三自由度機器人,使其停在任意S位置,然后再選另一任意G位置,此時按下鍵盤上的C鍵(編程時可任意設定),虛擬機器人將按照期望軌跡先加速后減速從S位置向G位置運動,當運動到任意P0位置時,按下鍵盤上的Z鍵,讓機器人以一定速度突然停在此位置上,觀察其能否在虛擬場景中晃動,并且晃動一段時間后能否準確停在P0位置,從而證明晃動軌跡仿真模型的有效性。
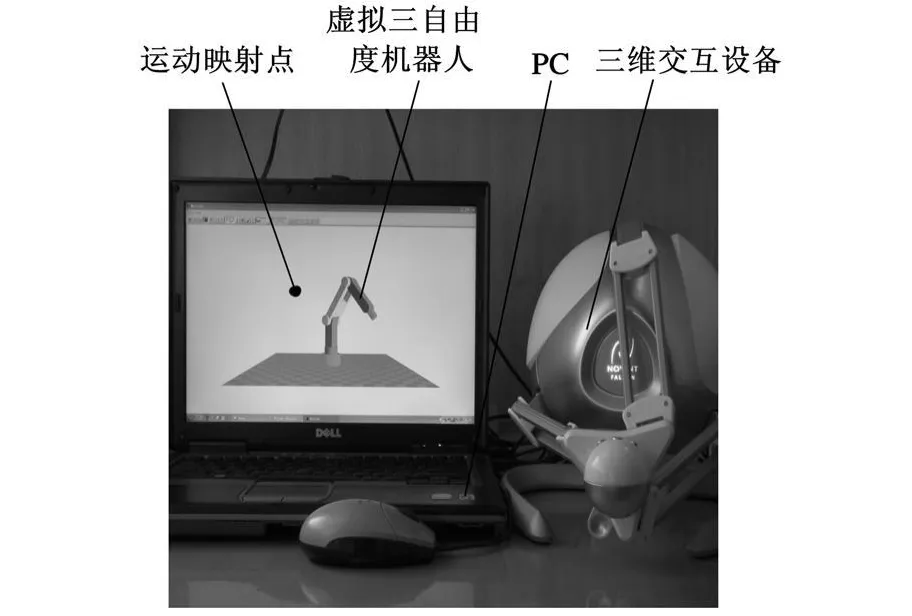
圖5 仿真實驗場景
仿真結果如圖6所示,為了便于觀察,將P0位置可視化為圖中的小球,結果表明,虛擬三自由度機器人當運動到P0位置突然停止時,可看到虛擬三自由度機器人在虛擬場景中晃動了一段時間后,準確地停在了P0位置,有很好的視覺臨場感效果,證明了該晃動軌跡仿真模型的有效性,同時也證明了該仿真模型在三自由度機器人的臨場感仿真平臺中的應用是成功的。
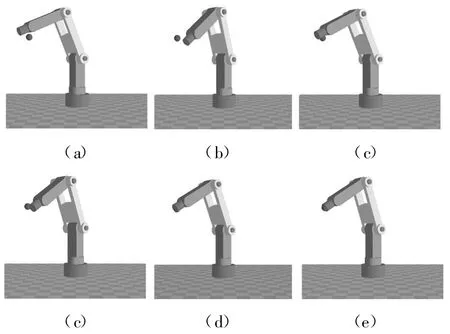
圖6 仿真結果
3 結束語
本文提出并研究了基于虛擬現實的機器人晃動軌跡的仿真方法和仿真模型,并以三自由度機器人為具體實例對該方法和模型進行了詳細分析計算,依據此算法開發出了仿真平臺中的相應程序,進行了視覺仿真實驗,仿真結果證明了該模型的有效性。
開發出的實驗平臺可用于教學演示,在該平臺上可任意修改物理參數;同時因為有很好的程序接口,也可進行二次開發;為控制系統的開發提供了很好的前期實驗平臺。
[1] 秦文虎,狄嵐,姚曉峰,等.虛擬現實基礎及可視化設計[M].北京:化學工業出版社,2009.
[2] 李剛俊,陳永.面向機器人應用的虛擬現實系統[J].成都:西南交通大學學報,2003,38(1):115-118.
[3] Burdea G C.Invited Review:the Synergy Between V irtual Reality and Robotics[J].IEEE Transactions on Robotics and Automation,1999,15(3):400-410.
[4] Chen Junjie,H uang Weiyi,Song A iguo,et al.Design of Research Platform on Telerobot System Based on V irtual Reality Technology[J].Journal of Southeast University(English Edition),2004,20(1):80-84.
[5] 倪濤,趙丁選,倪水,等.基于虛擬現實的遙操作工程機器人圖形仿真[J].農業機械學報,2005,36(5):80-83.
[6] 潘雙夏,劉靜,馮培恩.基于虛擬樣機的挖掘機器人軌跡規劃控制仿真和優化技術研究[J].中國機械工程,2005,16(21):1926-1930.
[7] 付西光,顏國正.7-DOF核工業機器人的軌跡規劃與仿真[J].系統仿真學報,2005,17(8):1948-1950.
[8] Albuquerque.Hap tic Device Abstraction Layer,Programmer's Guide,Version 2.1.3[N].N M,USA,2008-08-14.
[9] Lars P,M ike S,著.V isual Studio技術大全[M].劉彥博,王波,肖鵬,等譯.北京:人民郵電出版社,2009.
[10] M icroso ft Corporation.Microso ft MSDN Library for Visual Studio 2008[R].Redmond:M icrosoft Corporation,2008.
[11] Dave S,Mason W,Jackie N,et al.OpenGL編程指南[M].鄧鄭祥,譯.4版.北京:人民郵電出版社,2005.
[12] Bicchi A,Christensen H I,Prattichizzo D.Control Problems in Robotics[M].Berlin:Springer-Verlag,2003.
[13] Craig J J.Introduction to Robotics:Mechanics and Control[M].3rd Ed.N J,USA:Pearson Prentice Hall,Upper Saddle River,2005.
[14] Novint Falcon User M anual[R].N M,USA,2008.
Simulation of Sloshing Trajectory for Robots Based on Virtual Reality
Zhang Kemin1,2Liang Xichang1
1.The State Key Laboratory of Mechanical Transmission,Chongqing University,Chongqing,400030
2.Kyushu University,Fukuoka,Japan,819-0395
In order to develop telepresence simulation experimental p latform for robots based on virtual reality,it was proposed that a new simulationmethod to realize sloshing trajectory of robot's endpoints in the virtual scene by building the model of 1-DOF and sm all damping free vibration.Taking 3-DOF robot for good examp le themodel wasanalysed in detail.Finally,discrete equations for joint trajectory of the robotw ere obtained to realize VS programming simulation,and the compiled program of telepresence simulation platform for 3-DOF robot was developed to carry a simulation experiment.The simulation results show that this algorithm is valid.
virtual reality;robot;sloshing trajectory;simu lation
TP391;TP242
1004—132X(2011)04—0408—04
2010—04—21
國家留學基金委資助項目(2008101103)
(編輯 王艷麗)
張克敏,男,1977年生。重慶大學機械傳動國家重點實驗室博士研究生,曾作為聯合培養博士研究生公派留學日本九州大學。研究方向為基于虛擬現實的機器人仿真。梁錫昌,男,1934年生。重慶大學機械傳動國家重點實驗室教授、博士研究生導師。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19