基于哈密頓方程的非完整約束控制系統分析及應用
2011-02-01 01:39:24劉云平
中國機械工程 2011年4期
劉云平
1.南京信息工程大學,南京,210044
2.淮陰工學院數字化制造技術江蘇省重點實驗室,淮安,223003
基于哈密頓方程的非完整約束控制系統分析及應用
劉云平1,2
1.南京信息工程大學,南京,210044
2.淮陰工學院數字化制造技術江蘇省重點實驗室,淮安,223003
針對航天器多體系統受非完整約束作用時,其動力學方程是強非線性微分方程組而難以求解析解、系統的穩定性及其控制難以進行分析的問題,提出通過帶非完整約束的哈密頓控制系統對航天器多體系統的姿態穩定及控制進行分析的方法。采用該方法可以避免求解非線性方程組的邊值問題。建立了一種簡潔的航天器多體系統姿態穩定性控制方法,而且該方法使得系統的運動控制更加易于從物理意義上進行解釋,即使得系統的穩定控制可以理解為系統和控制器之間的能量平衡。通過算例進行了驗證和說明。
非完整約束;哈密頓方程;多體系統;姿態控制
0 引言
近幾年來,各種類型的非完整控制系統在航空航天領域和機器人領域受到越來越多學者的關注。控制問題的相關難點與非完整系統特性及控制目的有關。文獻[1]介紹了許多先進的非完整運動規劃方法。Lafferrie re等[2]在考慮冪零系統情況下,提出了使用分段定常輸入的通用運動方法。Li等[3]使用標準路徑研究了球面指端在物體上的運動。Brockett等[4]受典型系統最優控制的啟發,采用了以頻率表示的正弦信號作為輸入來完成非完整運動控制系統的設計。航天器多體系統在忽略微弱的重力梯度力矩時,相對于質心的動量矩守恒使得系統成為非完整約束系統[1],其動力學方程是非線性微分方程組,求出其顯式解非常困難,一般采用數值積分求其數值解。而且方程的積分要求滿足始末兩個狀態的運動條件,屬于解兩點邊值問題,此問題的求解非常困難。帶有經典約束的未受控制的機械系統可以被寫成與一般形式的泊松括號、約束狀態空間及內部能量相關的哈密頓運動方程[5]。哈密頓控制系統通過哈密頓正則方程描述系統,它代表了普遍的物理意義。
本文研究了帶非完整約束的哈密頓控制系統,并將其應用到了航天器多體系統的姿態控制中,避免了求解非線性方程組的邊值問題,而且使得系統的運動控制更加容易從物理意義上進行解釋。
1 非完整約束系統哈密頓系統
經典的帶約束機械系統的Euler-Lagrange方程[6]為


2 穩定性分析及控制律設計
注意到動力學方程(式(7))是能量守恒的。通過反對稱矩陣J r可以直接獲得:



3 應用實例
以文獻[1]中的通過鉸接機械臂來控制姿態變化的平面型空間雙臂機器人(圖1)為例,通過以上理論方法分析通過空間機器人的機械手臂進行姿態調整的過程。
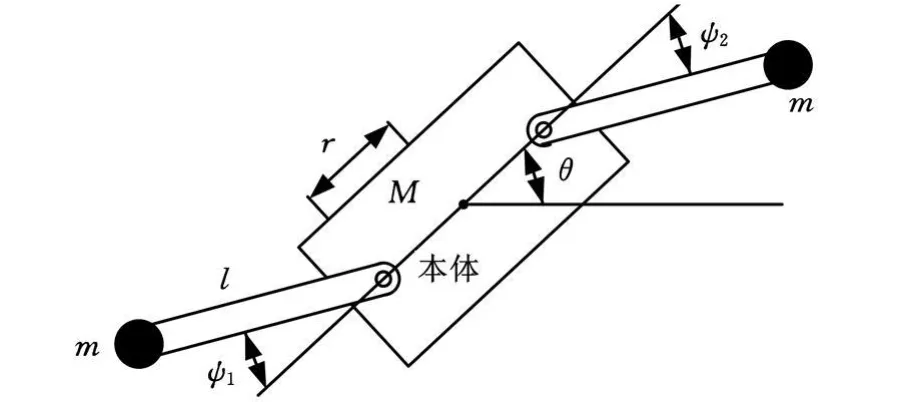
圖1 空間機器人
其中邊界條件為q(0)=q0=(π/3,-π/6,π/4)和q(t)=q f=(0,0,0)。本體質量M=4kg,質點質量m=2kg,l=1.5m,r=1m,本體轉動慣量I=4.2kg?m2。
設θ為本體與水平線的夾角,ψ1和ψ2分別為左臂和右臂與本體之間的夾角,r(二維矢量)為本體上質心的位置。系統的動能為
根據式(7)得到新的坐標(ψ1,ψ2,θ)下的哈密頓動力學方程為

ψ1、ψ2、θ軌跡最終穩定于 ψ1=0 、ψ2=0 、θ=0處,如圖2所示。
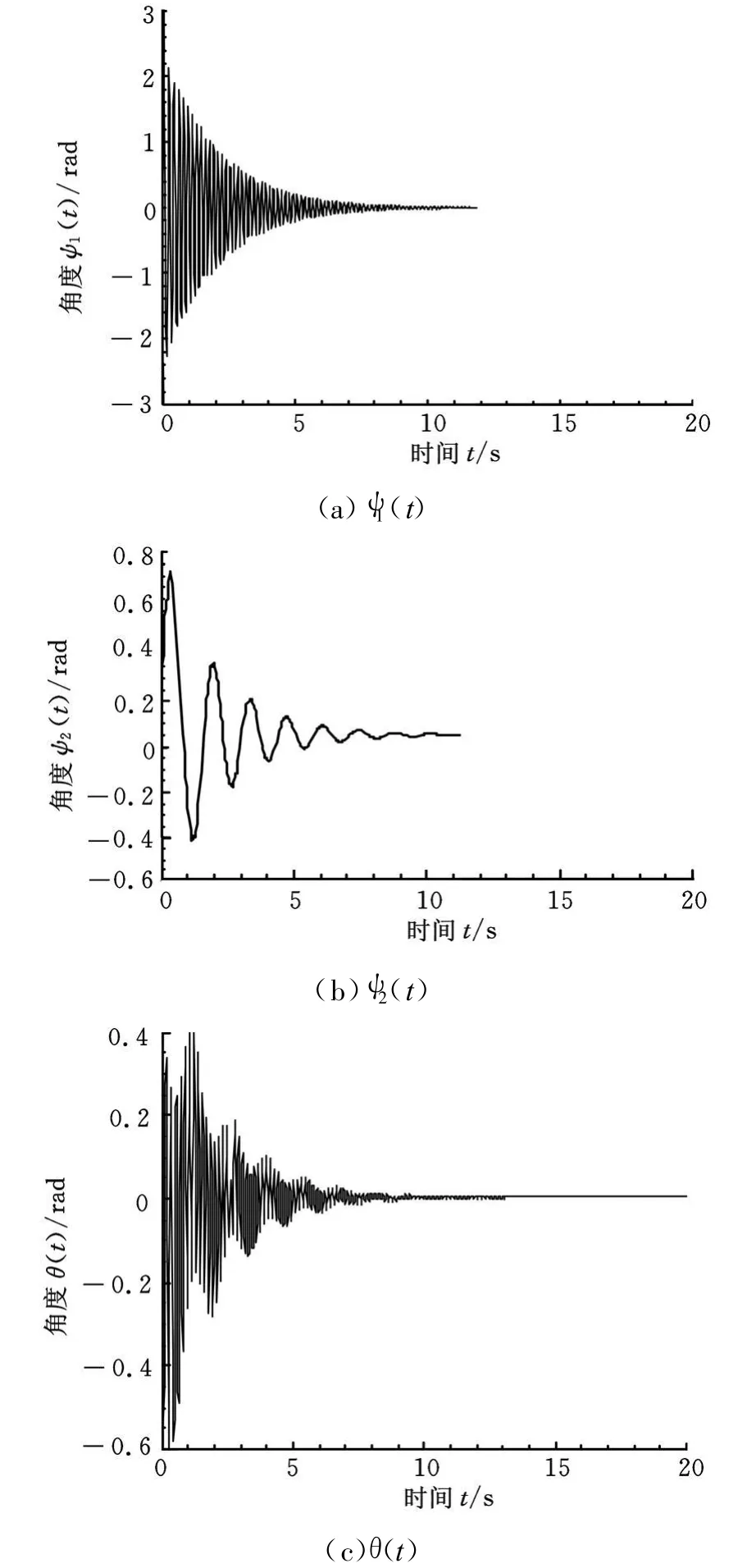
圖 2 ψ1(t)、ψ2(t)、θ(t)軌跡曲線
通過圖2所示的空間機器人本體的姿態角的歷程變化曲線圖可以發現本體的姿態大約在第10s時達到期望值,說明通過非完整約束的哈密頓控制系統方法可以對航天器多體系統的動力學及姿態穩定控制進行分析,避免了對Euer-Lagrange方程中的λ求解及非線性動力學微分方程的兩點邊值問題,而且也驗證了可以通過航天器的鉸接附件對其姿態進行調整。
4 結束語
本文通過結合帶經典約束的機械多體系統的動力學方程,研究了帶非完整約束的哈密頓系統的動力學方程,并分析了其穩定性及控制律。哈密頓正則方程描述的哈密頓控制系統代表了普遍的物理意義。本文將該方法應用到了航天器多體系統的姿態穩定控制分析當中,并且避免了求解兩點邊值非常困難的問題。
[1] M urray R M,Shastry S.A M athematical Introduction to Robotic M anipu lation[M].1st ed.Boca Raton:CRCPress Inc.,1994.
[2] Lafferriere G,Sussmann H J.A Differential Geometric App roach to Motion Planning[C]//Nonholonom ic Motion Planning.Dordrecht:K luwer Academic Pub lishers,1993:235-270.
[3] Li Z,Canny J,Motion of Tw o Rigid Bodies with Rolling Constrain[J].IEEE Transactions on Robotics and Automation,1990,6(1):62-71.
[4] Brockett RW,Dai L.Nonholonom ic Kinematics and the Ro le of Ellip tic Functions in Constructive Controllability[C]//Nonho lonomic Motion Planning,K luw er.Dordrecht:K luwer Academ ic Publishers,1993:1-22.
[5] Anthony M.Bloch,Nonholonom ic Dynam ics[J].Notices of the American Mathematical Society,2005,52:324-333.
[6] Bloch A M,Baillieul J,Crouch P E,et al.Nonholonom ic M echanicsand Control[M].Berlin:Sp ringer,2003.
[7] Eloch A M,Reyhanoglu M,M cclam roch N H.Control and Stabilization of Nonholonom ic Dynamic System s[J].IEEE T rans.Aut.Control,1992,37:1746-1757.
[8] O rtega R,Loria A,N ick lasson P J,et al.Passivitybased Contro l of Euler-Lagrange System s[M].London:Springer-Verlag,1998.
[9] Maschke B M,van der Schaft A J.A H am iltonian Approach to Stabilization o f Nonholonom ic Mechanical Systems[C]//Proc.IEEE 33rd Conf.on Decision and Control.Lake Buena V ista,1994:2950-2954.
[10] Ehlers K J,Koiller R.Montgomery,Nonho lonomic M echanics via M oving Frames:Cartan's Equivalence and Ham iltonizable Chaplygin Systems[C]//Bread th of Symp lectic and Poisson Geometry:Festschrift for A lan Weinstein.Boston:Birkhauser,2004:75-120.
[11] Bloch A M,Chang D,M arsden J E,et al.Controlled Lagrangians and the Stabilization of Mechanical System sⅡ:Potential Shaping[J].IEEE Transactions on Automatics Contro l,2001,46(10):1556-1571.
Nonholonom ic Constraint Control System Analyses and App lications Based on Hamiltonian Equations
Liu Yunping1,2
1.Nanjing University of Information Science&Technology,Nanjing,210044
2.Jiangsu Provincial Key Laboratory of DigitalM anufacturing Technology,Huaiyin Institute of Technology,Huai'an,Jiangsu,223003
For the dynam ic differential equations of spacecraft mu ltibody system is strongly nonlinear with nonholonomic constraint,it is difficult to find the analy tical solution and analyse its stability and contro l p rob lem.The two point boundary value p rob lem of non linear dynamic differential equations can be avoided by the Hamiltonian contro l system with nonholonomic constraints application to the analysis of attitude stability.This is a com pactm ethod for the attitude control of the spacecraft mu ltibody system.Furthermore,the contro l action has a clear physical interp retation that the system stability of contro l can be understood as the energy balance between system and controller.The last is the simulation exam ple.
nonholonom ic constraint;Hamiltonian equation;multibody system;attitude control
TP241.3
1004—132X(2011)04—0479—05
2010—05—04
國家自然科學基金資助項目(50375071);淮陰工學院數字化制造技術江蘇省重點實驗室開放課題資助項目(HGDML0904)
book=237,ebook=211
(編輯 王艷麗)
劉云平,男,1979年生。南京信息工程大學信息與控制學院講師、博士。主要研究方向為機械多體系統動力學與控制、航天器姿態動力學與控制。發表論文10余篇。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12