不同主流速度下障礙渦脫落冷流實驗研究①
2011-05-03 08:29:20甘曉松何國強楊尚榮
固體火箭技術 2011年4期
甘曉松,何國強,楊尚榮,岳 赟
(西北工業大學燃燒、熱結構與內流場重點實驗室,西安 710072)
0 引言
現代固體發動機盡管采用了含鋁復合固體推進劑,但大長徑比固體火箭發動機仍然受到燃燒不穩定的困擾。為解決大型分段式裝藥固體發動機的燃燒不穩定問題,美國和歐洲都投入了大量的人力和物力。美國開展的多學科大學研究倡議(MURI:Multi-Disciplinary University Research Initiative)試圖從基礎化學、燃燒和流體動力學的角度深入研究燃燒不穩定問題[1];以法國為主的歐洲啟動兩大研究計劃研究燃燒不穩定問題:分段固體發動機氣體動力學(ASSM:Aerodynamics of Segmented Solid Motors)和壓強振蕩計劃(POP:Pressure Oscillation Programs)[2]。ASSM 的主要科學目標是對渦脫落進行深入理解和建模,促進數值模擬技術的發展。POP計劃是利用P230的縮比模型發動機開展實驗研究,獲得實驗和數值數據庫,加強對分段發動機中渦脫落導致壓強振蕩現象的理解,尋求燃燒不穩定的抑制方法。國外研究初步表明,聲渦耦合產生的共振是大長徑比固體發動機燃燒室壓強振蕩的源頭,當推進劑的壓強耦合響應等增益作用強于兩相流阻尼等抑制作用時,就會出現較為強烈的壓強振蕩。為深入了解渦產生的條件、渦與發動機結構的固有聲模式耦合的條件等,需要用冷流實驗的方法研究燃燒室的氣體動力學過程。ASSM-POP項目中一部分研究采用冷流實驗裝置,如 ONERA的 VECLA[3]和VALDO[4-5]及馮·卡門流體動力學研究中心(VKI)的冷流實驗器[6-7]。
大長徑比固體火箭發動機可能存在3種類型的渦脫落[8]:障礙渦脫落(OVS)、轉角渦脫落(AVS)和表面渦脫落(SVS)。針對障礙渦脫落,Anthoine J等[9]采用P230的1/15縮比實驗器,測試了障礙物高度和障礙物間距之比h/L與壓強波動的關系;Yildiz D[10]研究了障礙物在試驗器中的位置對壓強振蕩的影響;壓強振蕩隨障礙物剛度的變化規律在文獻[11]中做了考慮;為了觀察旋渦的配對現象,PIV(particle image velocimetry)技術[12]被用來顯示試驗器內部的流動細節。
本文使用高速攝影平臺[13]和壓強測試系統來研究不同主流速度下障礙渦脫落的產生規律及脫落渦與試驗器聲腔耦合對壓強振蕩的影響。高速攝影技術可捕獲渦脫落的整個運動過程,這無疑可加深對聲渦耦合機理的理解。
1 實驗系統
冷流試驗系統主要由空氣供給系統、冷流實驗器、高速攝影系統、壓力測試系統及示蹤粒子加入系統等組成,如圖1所示。
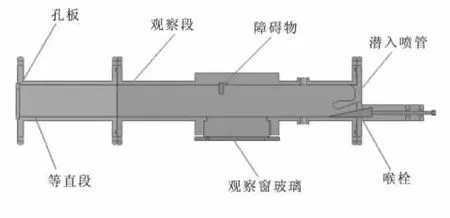
圖1 冷流實驗器結構示意圖Fig.1 Schematic diagram of cold flow experimental equipment
1.1 冷流試驗器
為了便于高速相機對實驗器內流場進行拍攝,實驗器采用二維結構,在障礙物附近區域開有觀察窗和光源窗。整個冷流實驗器分為多段,主要包括以下幾部分:
(1)進氣段:主要負責與空氣供給系統相連,并確保氣流穩定和均勻,進氣段開有傳感器孔,用于測量孔板前的氣流壓強。
(2)多孔板:主要是隔斷氣流上、下游之間的聲波傳播,以便能夠獲得確定長度的冷流實驗器聲腔。
(3)等直段:來流經過孔板后,需要經過一段較長的距離使產生的旋渦耗散。在該段開有傳感器孔,測量孔板后的壓強,即工作段的靜態壓強。
(4)觀察段:該段安裝有障礙隔板,在其附近開有觀察窗來實現對旋渦產生、脫落和傳播的觀察,并對該過程進行拍攝。
(5)噴管段:設計了一個潛入式噴管。
1.2 高速攝影系統
PIV和PLIF技術在流場顯示中廣泛應用,但這2種方法使用的都是頻率約30 Hz的脈沖激光器,只能得到流場的瞬態情況,對于頻率較高的情況就有不足。故本文試驗采用高速攝影系統來記錄障礙渦脫落的整個動態過程,通過對拍攝圖像的后處理,可得到半定量的測量結果。
本文采用的高速攝影系統主要包括激光器、片光轉換裝置和高速數字相機,原理如圖2所示,圖2中黑點為示蹤粒子。示蹤粒子加入裝置見圖3,示蹤粒子選用粒徑為1~10μm的Al2O3粉末。

圖2 高速攝影系統示意圖Fig.2 Schematic diagram of high speed camera system

圖3 示蹤粒子加入裝置Fig.3 Supp ly equipment of trace particle
固體激光器提供持續的光源,激光方向可通過光導臂轉換。片光源轉換裝置可將點激光轉換為片光源照射在流場區域。同時在垂直于片光源的方向放置高速數字相機進行拍攝,利用流場中鋁粒子的散射作用,就可獲得二維流場區域內的旋渦運動情況。
1.3 壓強測試系統
障礙渦脫落引起聲渦耦合后,最直接的表現就是壓強振蕩,因此實驗中壓強測試系統是最為關鍵的部分。本實驗中要測試的壓強信號主要包括2種:靜態壓強和動態壓強。靜態壓強是指實驗器穩定工作時內部的平衡壓強;動態壓強是指在穩定工作時,基于平衡壓強上下波動的波動值,即所謂的聲壓。對于靜態壓強的測量,可使用普通的壓強傳感器。但對于動態壓強,由于冷流實驗中壓強振蕩的振幅相對較小,故必須使用靈敏度較高的壓電式傳感器。測量時,壓電式傳感器首先獲得振蕩的電荷信號,然后通過電荷放大器轉換為電壓信號,再通過數據采集系統轉化為壓強信號。本文靜態壓強測試使用常規的DaCY420傳感器,動態壓強測試采用國產CY-YD-211壓電式傳感器,靈敏度為6 960 pC/105Pa(靜標)。
2 實驗結果與分析
2.1 壓強測量結果分析
通過冷流試驗器喉栓的調節,通道主流速度可在Ma=0.07~0.18之間連續變化,每次調節增量Ma=0.01。試驗后,利用快速傅里葉變換(FFT)對測得的壓強信號進行分析,獲得壓強振蕩的振幅和頻率如圖4所示。
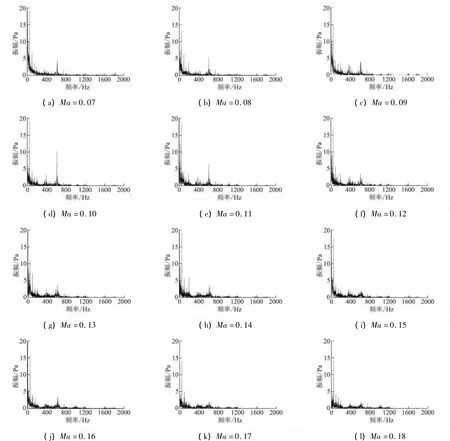
圖4 動態壓強FFT分析Fig.4 FFT analysis of dynam ic pressure
由圖4可看出,當主流速度為Ma=0.10和Ma=0.11時,在頻率為616 Hz處存在較為明顯的壓強振蕩,其振幅分別為10.4 Pa和6.65 Pa。對比試驗器聲場分析結果可知,616 Hz與實驗器的三階軸向固有頻率基本相近。在其他工況下,雖然在前三階固有頻率附近均存在一定程度的振蕩,但幅值都較小。
圖5為高速攝像圖片,每幅圖片中均保留了拍攝時間,其中Δt=343~345μs。由圖5可見,當主流速度為Ma=0.07時,旋渦不很明顯,且無規律,脫落的旋渦很快就向上卷起,耗散的非常快。對應的壓強測試結果顯示該流速下沒有明顯的壓強波動。利用聲渦耦合的理論進行分析,認為渦的脫落不穩定,沒有規律,就無法作為源頭激發具有“屬性”性質的試驗器聲腔的固有模態,也就不存在與之進一步形成有效耦合的可能性。當主流速度增加到Ma=0.11時,旋渦的脫落較為規律,在t時刻,有 A、B 2個旋渦,經過4Δt時間之后,旋渦B運動到原來旋渦A的位置,新產生1個旋渦C處于原來旋渦B的位置,經過8Δt時間之后,旋渦C、D代替了之前的旋渦B、C。據此估算此時旋渦脫落的頻率約為724 Hz。
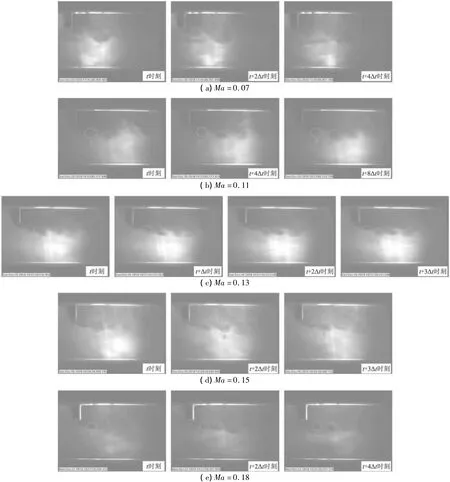
圖5 高速攝影圖片Fig.5 Experimental images of the high speed camera
其與試驗器聲場的三階固有頻率(616 Hz)比較接近。壓強測試也表明此時試驗器發生了頻率為616 Hz、振幅為6.65 Pa的壓強振蕩,故可推斷渦與試驗器內部聲場發生了耦合作用,從而產生了自激振蕩。
當主流速度提高到Ma=0.13時,障礙物后的旋渦脫落帶很明顯,在t時刻產生旋渦A,經過3Δt時間之后,旋渦B運動到原來旋渦A的位置,估算出旋渦脫落的頻率約為966 Hz。該頻率與實驗室聲腔的五階頻率1 019 Hz相近。結合壓強測量結果可知:Ma=0.13時的共振強度與Ma=0.11時相比微乎其微,似乎違背了聲渦耦合理論中的“鎖頻”現象。分析原因認為,一方面激發聲場的高階模態且發生共振相比于低階模態需要更多的能量[14],且聲渦耦合過程中傳遞的能量不足以完成高階模態的激發;另一方面,作為示蹤粒子加入的Al2O3粉末(粒徑為1~10μm)對高頻振蕩有很強的阻尼作用[15]。這兩方面原因可能導致試驗器沒有出現高階的壓強振蕩。
隨著主流速度進一步提高到Ma=0.15時,在t時刻有一個旋渦A;經約2Δt~3Δt時間之后,旋渦B代替了原來的旋渦A,估算旋渦脫落頻率在1 208 Hz左右,其與試驗器聲腔的六階固有頻率(1 190 Hz)接近,但同樣沒有產生壓強波動,其原因分析同上。
同時,隨著“可能”被激發的模態的升高,粒子的阻尼作用與激發振蕩所需的能量都將進一步增強和增多,據此推斷當主流速度達到Ma=0.18時,更不會產生振蕩。當主流速度為Ma=0.18時,旋渦脫落的頻率又有升高,在t時刻有一個旋渦A;經過2Δt時間之后,旋渦B代替了原來的旋渦A;經過4Δt之后,旋渦C代替了原來的旋渦B,估算得到旋渦脫落的頻率約為1 449 Hz,接近于試驗器的七階固有頻率(1 390 Hz),但沒有壓強波動發生,驗證了推斷的正確性。
3 結論
(1)本文建立的冷流試驗方案合理可行,結合高速攝影對障礙渦脫落進行了初步研究,獲得了幾乎連續的渦的運動情況。
(2)試驗結果初步表明,隨著主流速度的提高,障礙物處旋渦脫落的頻率相應增加,障礙渦脫落的頻率與主流速度基本上是遞增關系。
(3)初步研究表明,在某一主流速度下,當旋渦脫落的頻率與實驗器聲場的某一低階固有頻率接近時,會發生壓強振蕩,且兩者頻率越接近,則振幅越大。
[1] Blomshield FS.Summary ofmulti-disciplinary university research initiative in solid propellant combustion instability[R].AIAA 2000-3172.
[2] Fabignon Y,Dupays J,Avalon G.,et al.Instabilities and pressure oscillations in solid rocketmotors[J].Aerospace Science and Technology,2003(7):19-200.
[3] Avalon G.Flow instabilities and acoustic resonance of channels with wall injection[R].AIAA 98-3218.
[4] Avalon G,Josset T.Cold gas experimental applied to the understanding of aeroacoustic phenomena inside solid propellant boosters[R].AIAA 2006-5111.
[5] Cerqueria S,Avalon G,Feyel F.An experimental investigation of fluid-structure interaction inside propellant rocketmotors[R].AIAA 2009-5427.
[6] Anthoine J,Olivari D.Cold flow simulation of vortex induced oscillations in a model of solid propellant boosters[R].AIAA 99-1826.
[7] Anthoine J,Lema M R.Comparison of different passive control solutions for reducing SRM pressure oscillations using cold flow experiments[R].AIAA 2008-4602.
[8] Guéry JF,Ballereau S,Franck G.Thrustoscillations in solid rocketmotors[R].AIAA 2008-4979.
[9] Anthoine J,Planquart P,OlivariD.Cold flow investigation of the flow acoustic coupling in solid propellant boosters[R].AIAA 98-0475.
[10] Yildiz D.Influence of radial injection flow on the aeroacoustic coupling in solid propellant boosters[R].AIAA 2001-2101.
[11] Anthoine J.Experimental study of passive control and inhibitor flexibility on pressure oscillations in large SRM[R].AIAA 2003-4671.
[12] Schram C.Sound produced by vortex pairing:prediction based on particle image velocimetry[R].AIAA 2002-2526.
[13] 陳曉龍,何國強,劉佩進.二維縮比發動機實驗器中旋渦運動的實驗研究[J].實驗流體力學,2011,25(1),37-41.
[14] Fischbach SR,Majdalani J,Flandro G A.Acoustic instability of the slab rocketmotor[J].Journal of Propulsion and Power,2007,23(1):146-157.
[15] Blomshield FS.Lessons learned in solid rocket combustion instability[R].AIAA 2007-5803.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52