基于多目標(biāo)遺傳算法的硅微機(jī)械電容式麥克風(fēng)優(yōu)化設(shè)計(jì)
2011-05-31 09:56:20計(jì)時(shí)鳴
中國機(jī)械工程 2011年4期
關(guān)鍵詞:優(yōu)化設(shè)計(jì)
董 健 王 偉 計(jì)時(shí)鳴
浙江工業(yè)大學(xué)特種裝備制造與先進(jìn)加工技術(shù)教育部重點(diǎn)實(shí)驗(yàn)室,杭州,310014
0 引言
麥克風(fēng)也稱為傳聲器,是把聲壓信號(hào)轉(zhuǎn)換為電信號(hào)的高靈敏度壓力傳感器。由于聲壓通常都比較小,人聽覺的頻率響應(yīng)范圍在20Hz~20k Hz,因此對(duì)麥克風(fēng)的靈敏度、頻率范圍有較高的要求。靈敏度表示麥克風(fēng)的聲電轉(zhuǎn)換效率,定義為自由場(chǎng)中聲壓為1Pa時(shí)麥克風(fēng)的開路輸出電壓。頻率范圍也稱帶寬,是指麥克風(fēng)正常工作的頻率帶寬,通常以帶寬的上限和下限來表示[1]。由于電容式麥克風(fēng)的敏感膜在聲壓的作用下會(huì)變形而改變電容,故可通過測(cè)量電容來檢測(cè)聲壓。當(dāng)微機(jī)械電容式麥克風(fēng)加載偏置電壓時(shí),復(fù)合敏感膜會(huì)變形,偏離初始位置,受到電磁力和彈性回復(fù)力的作用,要使敏感膜穩(wěn)定工作,電磁力必須和彈性回復(fù)力相等,使敏感膜處于平衡狀態(tài)。由于彈性回復(fù)力與敏感膜位移呈線性關(guān)系,電磁力與敏感膜位移呈非線性關(guān)系,當(dāng)偏置電壓大于某一臨界值時(shí),電磁力將大于彈性回復(fù)力,敏感膜與底板電極貼合,使麥克風(fēng)無法正常工作,這一偏置電壓的臨界值稱為最大工作電壓[2]。當(dāng)麥克風(fēng)正常工作時(shí),偏置電壓必須小于最大工作電壓。而在設(shè)計(jì)麥克風(fēng)時(shí)需要對(duì)不同的參數(shù)進(jìn)行折中。高靈敏度要求薄膜應(yīng)力較小,而小的薄膜應(yīng)力將導(dǎo)致最大工作電壓較低。盡管增加空氣間隙的厚度d可以提高最大工作電壓,但麥克風(fēng)的電容隨之減小,從而降低了麥克風(fēng)的靈敏度[1]。本文采用多目標(biāo)遺傳算法對(duì)硅微機(jī)械電容式麥克風(fēng)的結(jié)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì)。在本方法中,復(fù)合敏感膜參數(shù)、底板參數(shù)以及敏感膜與底板間距為設(shè)計(jì)變量,麥克風(fēng)靈敏度、最大工作電壓、工作頻率帶寬為優(yōu)化設(shè)計(jì)目標(biāo),采用多目標(biāo)遺傳算法求出 Pareto最優(yōu)解集。在所求出的Pareto最優(yōu)解集中選擇一組最符合設(shè)計(jì)要求的解作為麥克風(fēng)的設(shè)計(jì)參數(shù)。
1 硅微機(jī)械電容式麥克風(fēng)的結(jié)構(gòu)
麥克風(fēng)的主要結(jié)構(gòu)如圖1所示。矩形敏感膜包含一層高摻雜多晶硅層和兩層低應(yīng)力氮化硅層。敏感膜一端固定在硅基上,底部有許多微小的支柱,用來防止敏感膜在釋放過程中粘在硅基體上。矩形金屬底板通過4個(gè)金屬觸角固定在硅基體上。在底板上設(shè)計(jì)28個(gè)呈蜂窩狀排列的圓形通氣孔,用來改善敏感膜和底板之間的空氣壓膜阻尼。在底板上下兩面電鍍兩條梁。在敏感膜與梁之間,采用犧牲層技術(shù)加工形成空氣間隙。當(dāng)麥克風(fēng)加載偏置電壓時(shí),敏感膜變形并擠壓兩片梁片,形成一個(gè)雙固定式聲感敏感膜電極區(qū)域。在硅基體上開正方形聲孔作為聲音進(jìn)口腔。在敏感膜和金屬底板之間,采用犧牲層技術(shù)構(gòu)成空氣間隙。

圖1 麥克風(fēng)的主要結(jié)構(gòu)
2 硅微機(jī)械電容式麥克風(fēng)的優(yōu)化模型
硅微機(jī)械電容式麥克風(fēng)的優(yōu)化是基于麥克風(fēng)的工作原理和幾何關(guān)系,建立設(shè)計(jì)變量與優(yōu)化目標(biāo)、約束條件之間的數(shù)學(xué)關(guān)系,即建立數(shù)學(xué)優(yōu)化模型。
2.1 設(shè)計(jì)變量
麥克風(fēng)的主要幾何參數(shù)如圖2所示。以敏感膜中間層多晶硅厚度(h2)、敏感膜上下兩層氮化硅厚度(h1)、敏感膜吸合在橫梁上時(shí)與底板間隙(a a)、兩根橫梁的間距(a d)、底板寬度(a b)、底板長度(b b)及通氣孔半徑(r)為設(shè)計(jì)變量。優(yōu)化時(shí)設(shè)定敏感膜的寬度bd等于兩根橫梁的間距ad,底板上孔的個(gè)數(shù)以及形狀排列保持不變,通氣孔半間距a1等于
2.2 目標(biāo)函數(shù)
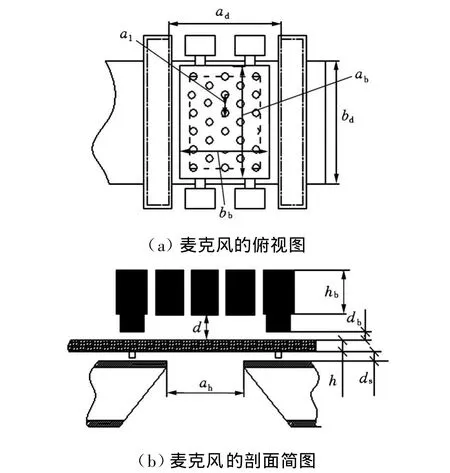
圖2 麥克風(fēng)的主要幾何參數(shù)
本文以麥克風(fēng)的靈敏度、最大工作電壓和共振頻率為優(yōu)化對(duì)象,優(yōu)化時(shí)希望麥克風(fēng)靈敏度(Sopen)、共振頻率 f r和最大工作電壓V p都越大越好,而遺傳算法優(yōu)化是求極小值的,所以建立優(yōu)化函數(shù)時(shí)設(shè)定f 1(x)=-S open,f 2(x)=-f r,f3(x)=-Vp,建立的多目標(biāo)優(yōu)化函數(shù)如式(1)[3]、式(2)、式(3)[4]所示 :
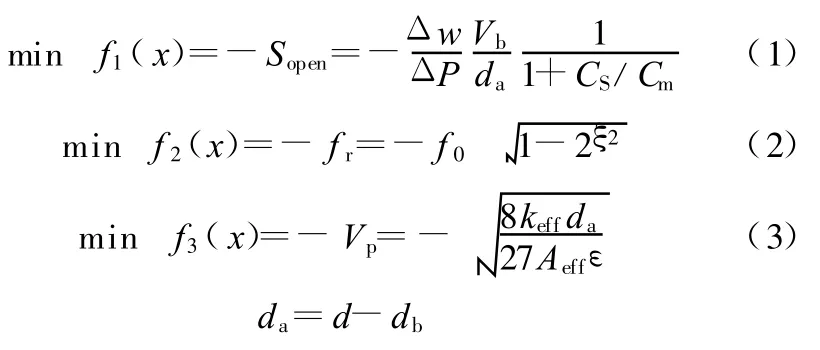
式中,Δw為敏感膜中心處的位移;ΔP為敏感膜上的壓力;Vb為偏置電壓;Cm為工作電容;CS為寄生電容;f0為敏感膜的一階模態(tài)頻率;ξ為麥克風(fēng)的阻尼比;keff為復(fù)合敏感膜等效剛度;Aeff為麥克風(fēng)有效電極面積;ε為介電常數(shù)。
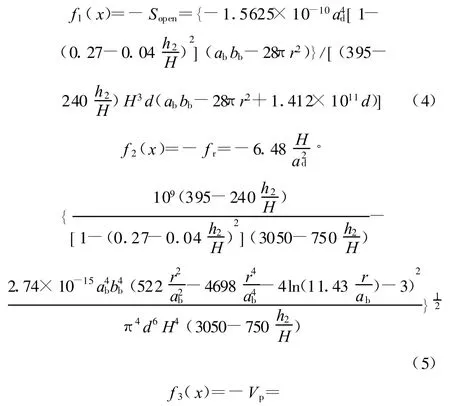
把麥克風(fēng)各結(jié)構(gòu)參數(shù)代入式(1)~式(3)可得
2.3 約束條件
各設(shè)計(jì)參數(shù)的變化范圍是有限的,依據(jù)硅微機(jī)械電容式麥克風(fēng)的使用要求和設(shè)計(jì)計(jì)算公式,建立的各項(xiàng)設(shè)計(jì)約束列舉如下:
敏感膜中間層多晶硅厚度 h2應(yīng)大于等于0.6μm,小于等于 1.5μm,即

敏感膜上下兩層氮化硅厚度h1應(yīng)大于等于0.1μm,小于等于 0.3μm,即

敏感膜與底板間隙d應(yīng)大于等于2μm,小于等于 3μm,即

兩根橫梁的間距 a d應(yīng)大于等于600μm,小于等于 900μm,即

底板寬度a b要大于等于0.85倍的橫梁間距ad,小于等于橫梁間距ad,因此該約束條件為

底板長度b b要大于等于0.68倍的橫梁間距ad,小于等于0.8倍的橫梁間距ad,因此該約束條件為

考慮到工藝條件的限制,通氣孔半徑r要大于等于20μm,小于等于1/3倍的通氣孔間距a1,即通氣孔半徑要小于等于1/18倍的底板寬度a b,因此該約束條件為

3 多目標(biāo)遺傳算法優(yōu)化
在上述麥克風(fēng)設(shè)計(jì)的目標(biāo)函數(shù)中,提高麥克風(fēng)的靈敏度會(huì)導(dǎo)致最大工作電壓減小。因此這些目標(biāo)之間是相互矛盾的,解決起來十分棘手。傳統(tǒng)的處理多目標(biāo)優(yōu)化問題的方法是用權(quán)重系數(shù)法將多目標(biāo)問題轉(zhuǎn)換為單目標(biāo)問題進(jìn)行求解[5]。上述方法首先要解決權(quán)重系數(shù)的取值問題,即先行決策——按照設(shè)計(jì)者的知識(shí)和經(jīng)驗(yàn)為多個(gè)目標(biāo)分配權(quán)重值,因此導(dǎo)致不同的設(shè)計(jì)偏向產(chǎn)生不同的優(yōu)化結(jié)果[6]。為解決上述問題,本文選用基于Pareto最優(yōu)解的多目標(biāo)遺傳算法獲得多個(gè)非線性約束的多目標(biāo)函數(shù)均衡的多個(gè)設(shè)計(jì)方案,為后續(xù)設(shè)計(jì)提供科學(xué)的依據(jù)。選個(gè)體總數(shù)為100,交叉率為0.8,變異率為0.01,經(jīng)過1400代遺傳迭代后得到35個(gè)Pareto解,表 1列出了該問題的部分Pareto最優(yōu)解。
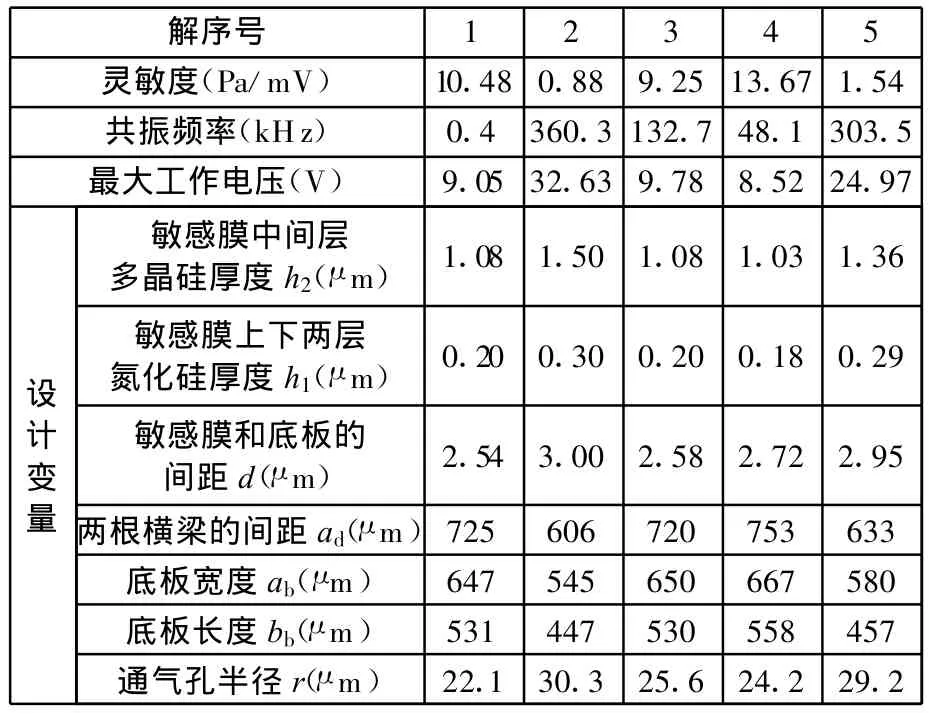
表1 硅微機(jī)械電容式麥克風(fēng)的部分Pareto最優(yōu)解及對(duì)應(yīng)的性能指標(biāo)
麥克風(fēng)設(shè)計(jì)時(shí)要求最大工作電壓至少大于8V,工作頻率帶寬大于10k Hz,靈敏度越大越好,根據(jù)此要求選擇4號(hào)解作為麥克風(fēng)的設(shè)計(jì)參數(shù)。
4 結(jié)束語
基于Pareto最優(yōu)解的硅微機(jī)械電容式麥克風(fēng)的多目標(biāo)優(yōu)化設(shè)計(jì),考慮了各設(shè)計(jì)目標(biāo)之間的均衡,得到的設(shè)計(jì)方案比常規(guī)的設(shè)計(jì)方案更符合客觀實(shí)際,更科學(xué)合理,顯示了多目標(biāo)優(yōu)化的技術(shù)和意義。
本文的研究方法可以方便地實(shí)現(xiàn)多方案設(shè)計(jì),為設(shè)計(jì)創(chuàng)新提供了可靠的依據(jù)。優(yōu)化結(jié)果也證明該結(jié)構(gòu)麥克風(fēng)具有良好的性能指標(biāo)。
[1] 王喆垚.微系統(tǒng)設(shè)計(jì)與制造[M].北京:清華大學(xué)出版社,2008.
[2] Wang W J,Lin R M,Zou Q B,et al.Modeling and Characterization of a Silicon Condenser Microphone[J].Micromech.Microeng,2004,14:403-409.
[3] Bergqvist J.Finite-element Modeling and Characterization of a Silicon Condenser Microphone with a Highly Perforate Blackplate[J].Sensors and Actuators.1993,39(S):191-200.
[4] Bao Minhang.Micro Mechanical Transducers[M].Amsterdam:Elsevier Science,2000.
[5] 孟琸,卜賀.規(guī)范化加權(quán)平方和法多目標(biāo)優(yōu)化設(shè)計(jì)[J].哈爾濱理工大學(xué)學(xué)報(bào),1995,17(5):76-81.
[6] 韓澤光,費(fèi)燁,鄭夕健.基于多目標(biāo)遺傳算法的圓柱螺旋壓縮彈簧方案設(shè)計(jì)[J].中國制造業(yè)信息化,2006,35(3):27-30.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16